
Impact Load Identification Algorithm of Helicopter Weapon Pylon Based on Time-Domain Response Signal



Abstract
:1. Introduction
2. Methodology
2.1. Theoretical Analysis of Standardized Processing Methods and Mapping Relationship
2.1.1. Structural Response Analysis
2.1.2. Impact Load Analysis
2.1.3. Impact Load Standardization
2.1.4. Mapping Relationship between Standard Load and Time-Domain Response
2.1.5. Summary
2.2. BP Neural Network
3. Results
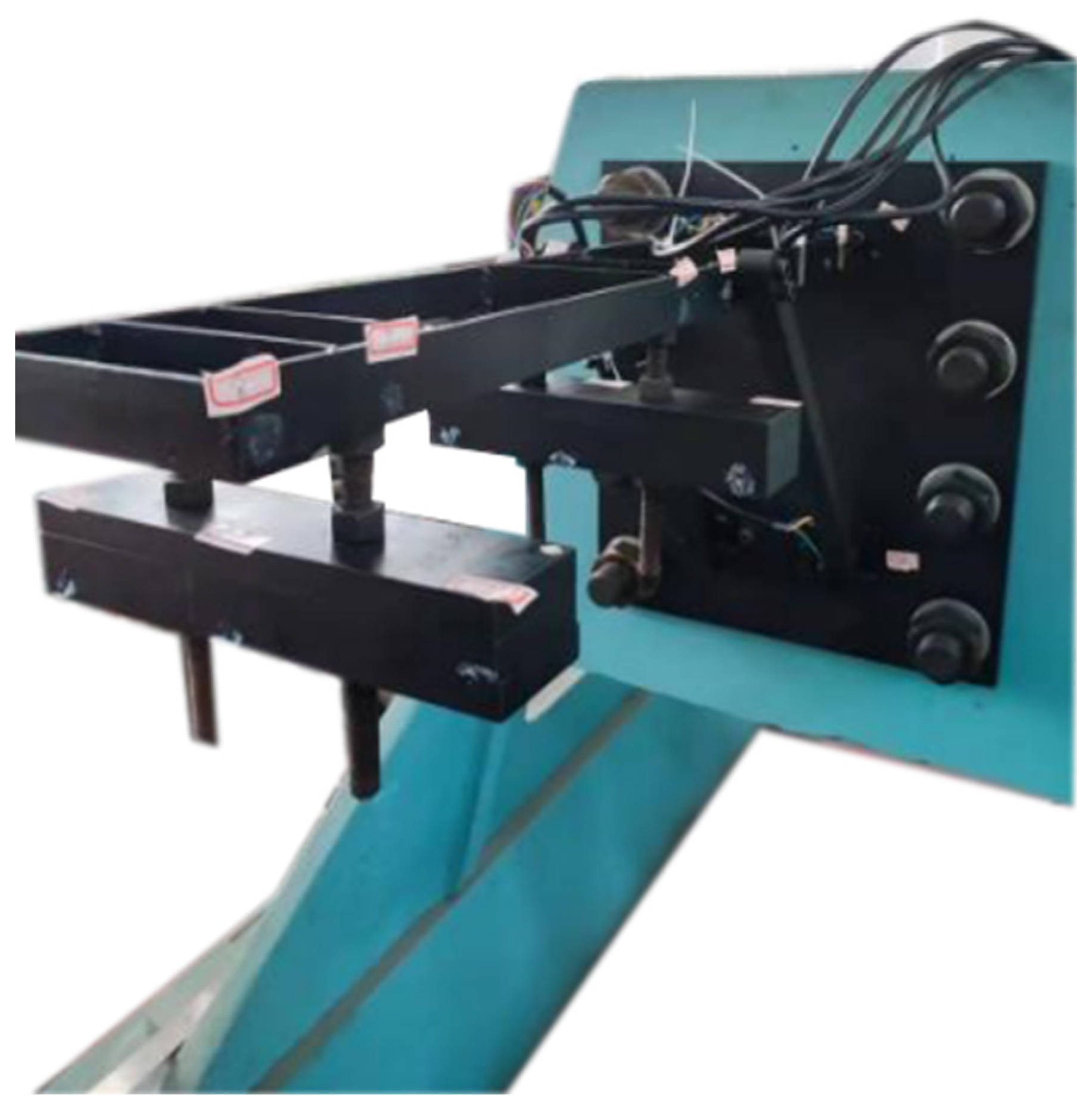
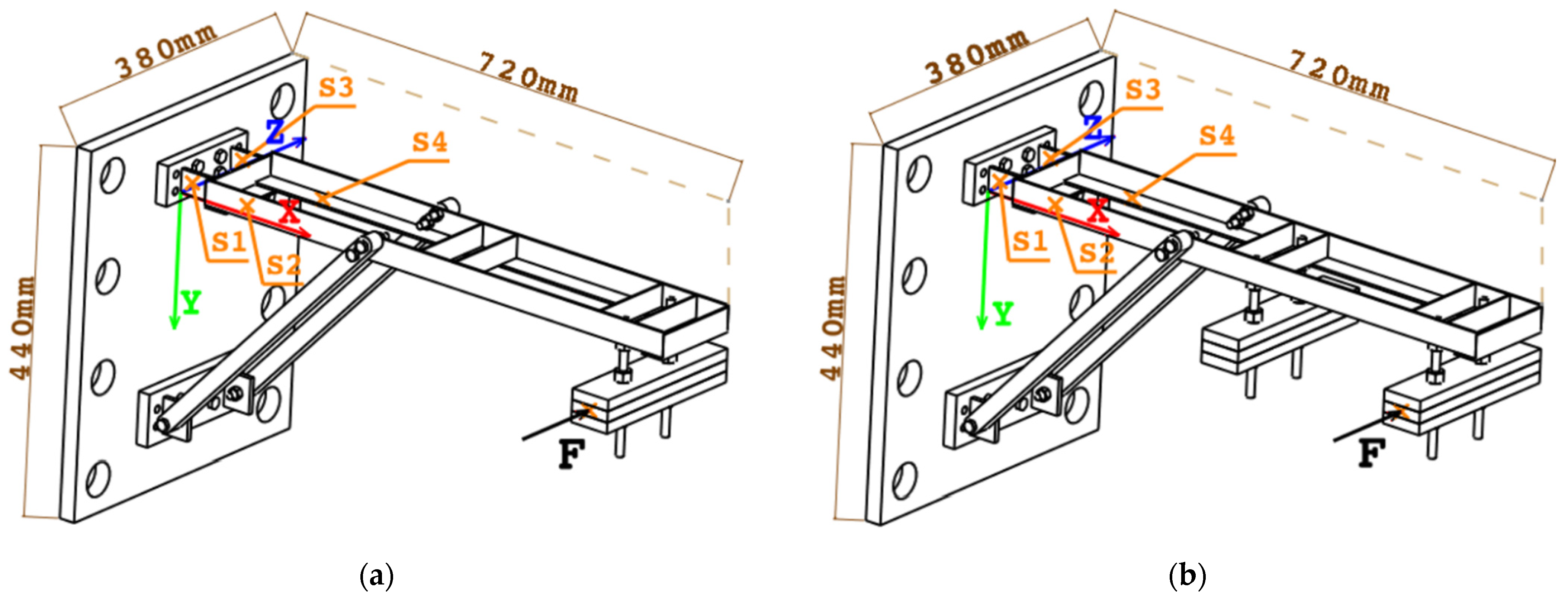
3.1. Design of Weapon Pylon Model
3.2. Determination of Measuring Point Position of Pylon Model
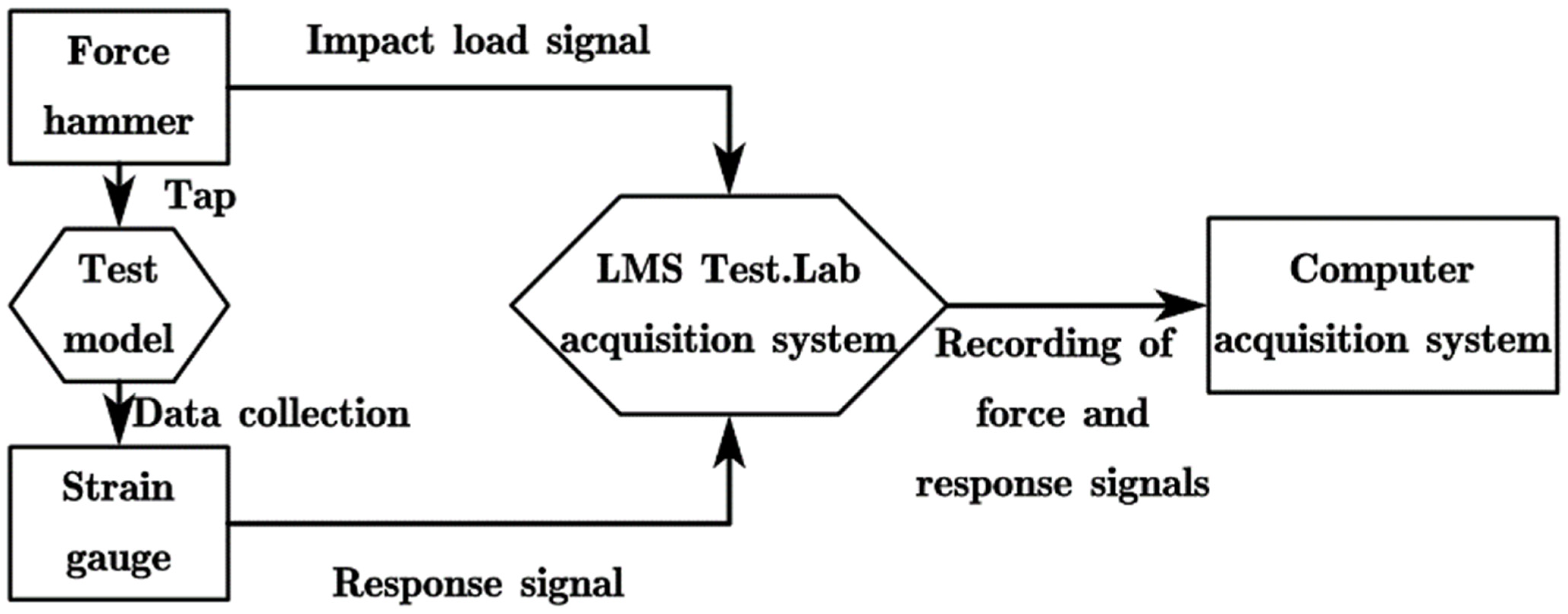
3.3. Test of Pylon Model
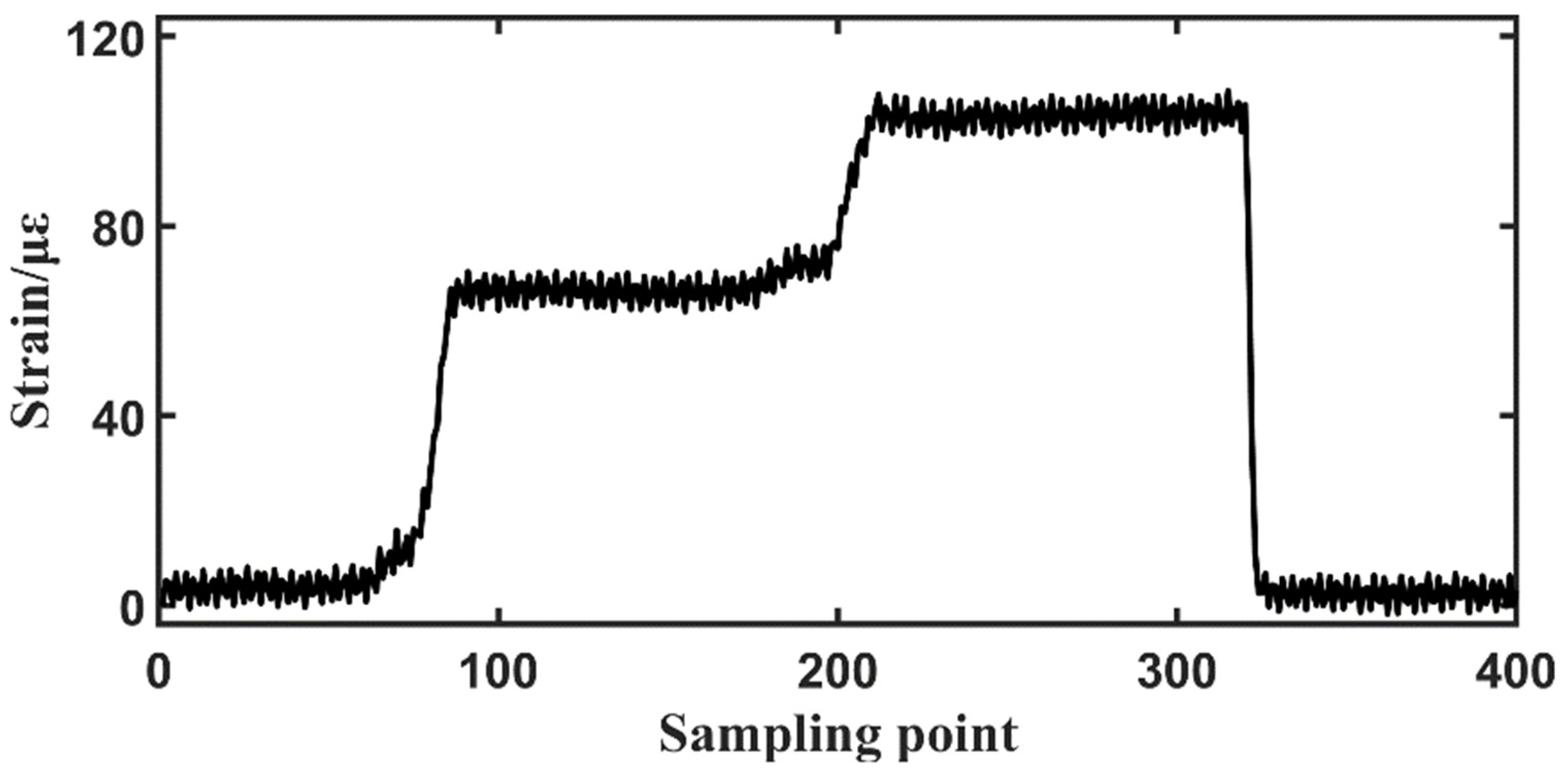
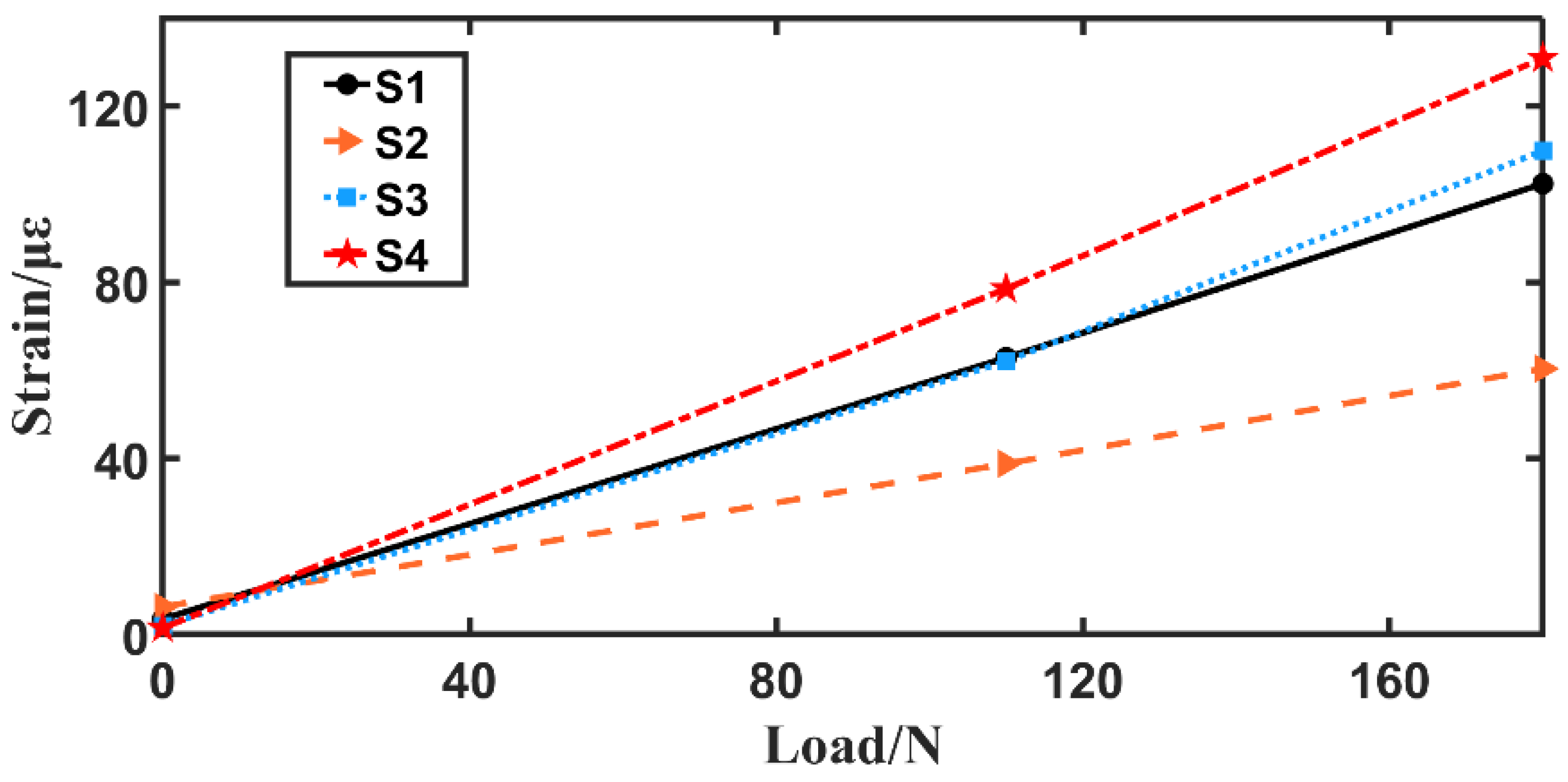
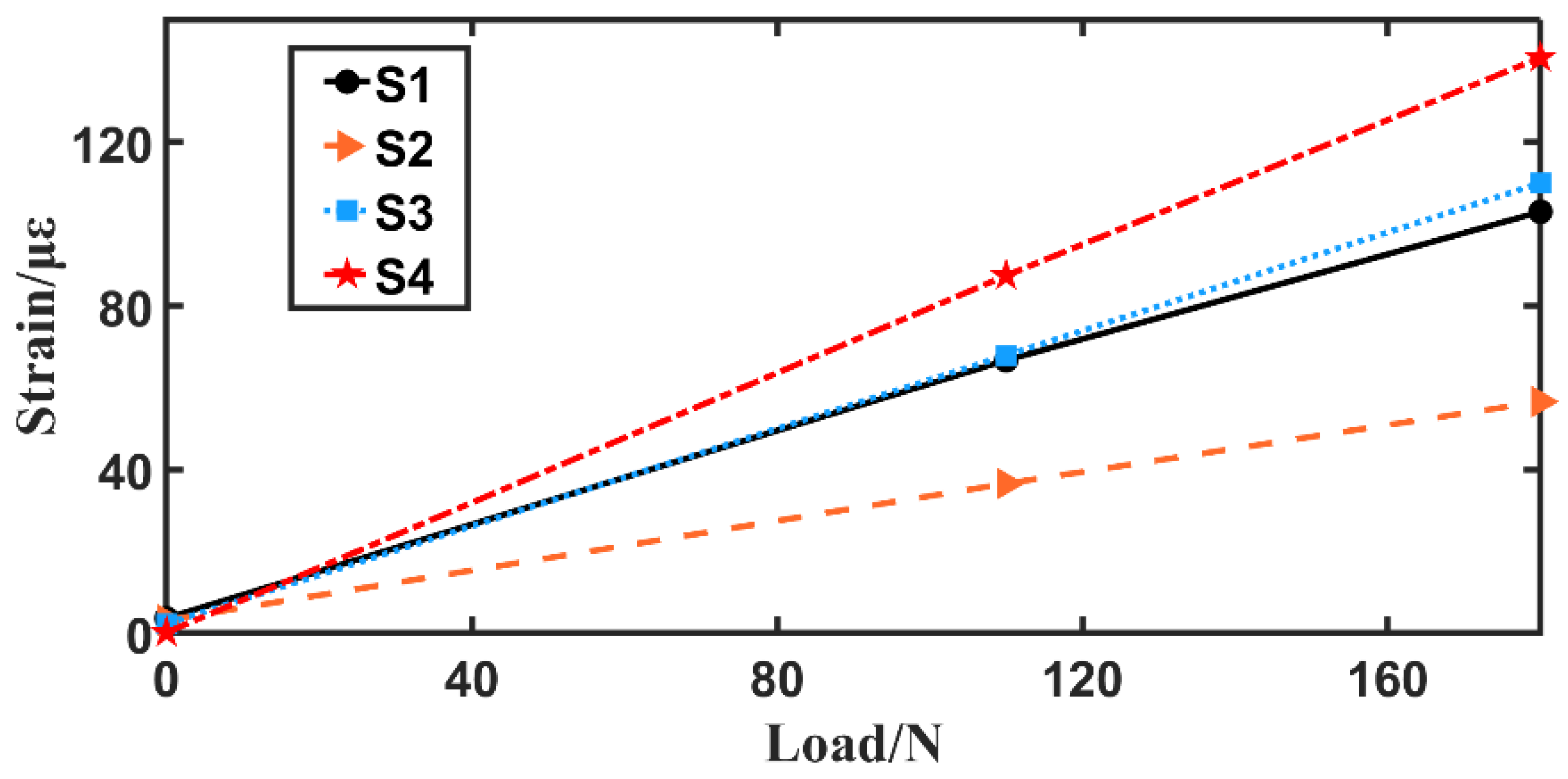
3.3.1. Test of Static Load Calibration
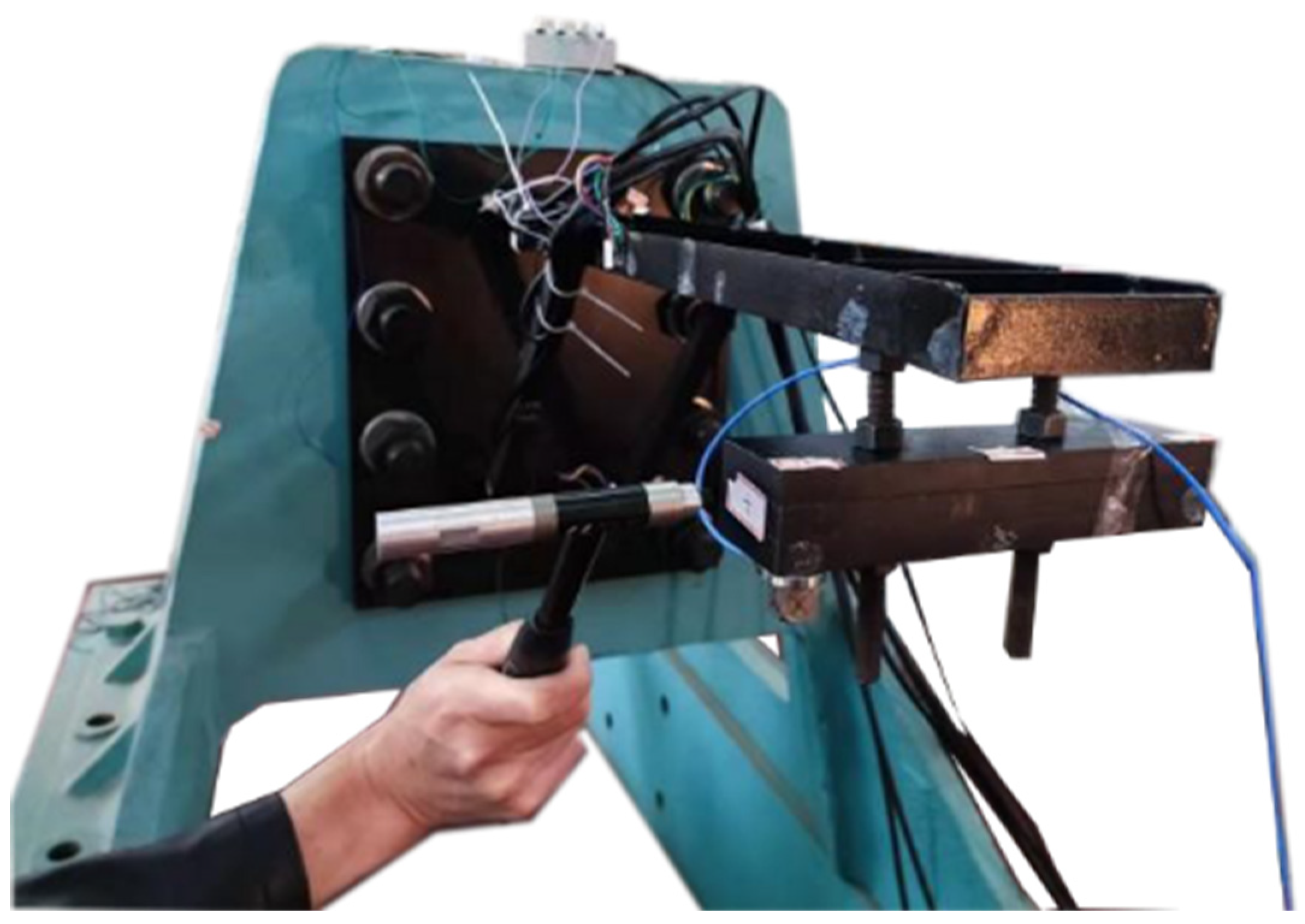
3.3.2. Test of Ground Impact
4. Discussion
4.1. Test of Static Load Calibration
4.1.1. Test Data Processing
4.1.2. Result Analysis
4.2. Test of Ground Impact
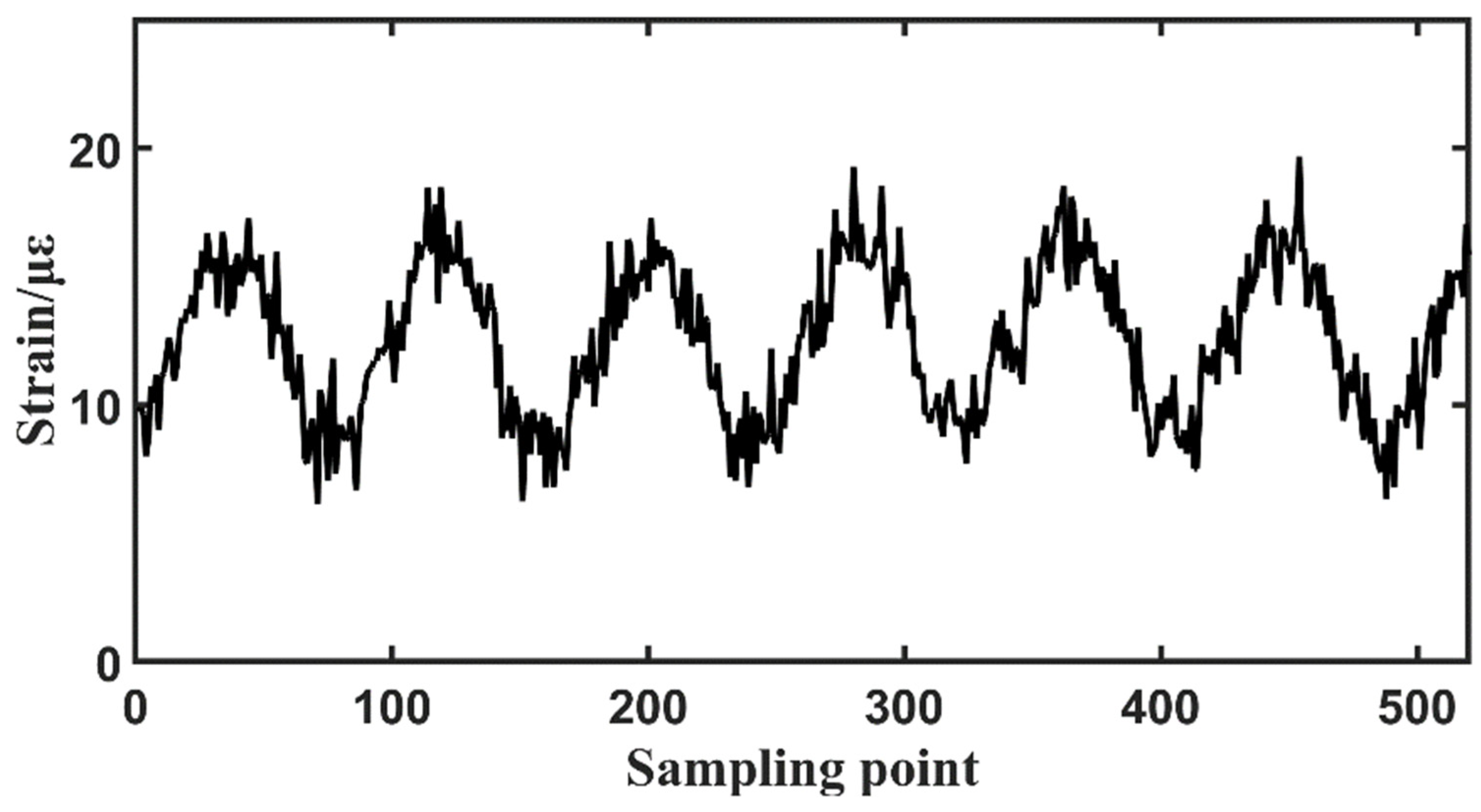
4.2.1. Test Data Processing
- (1)
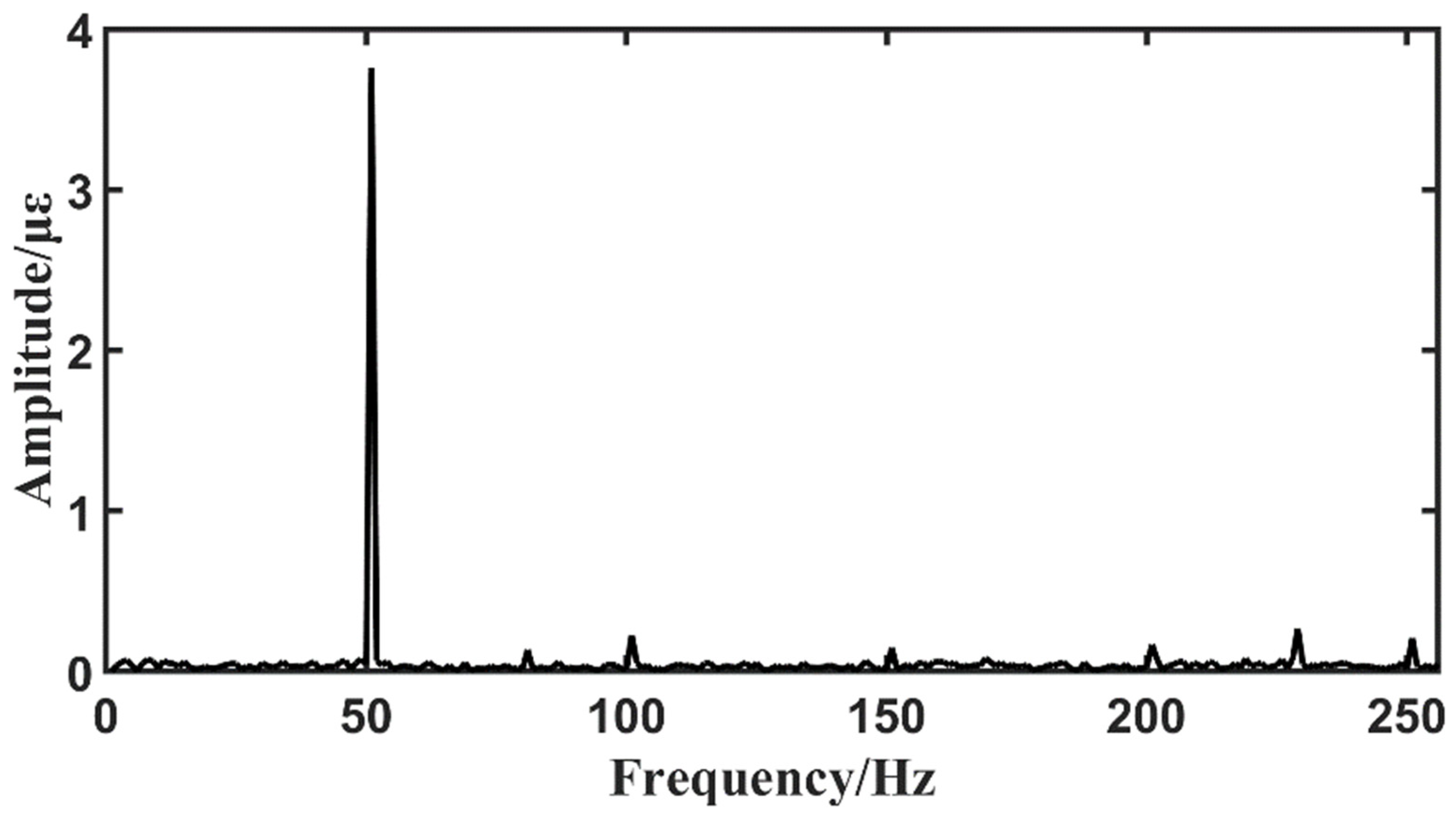
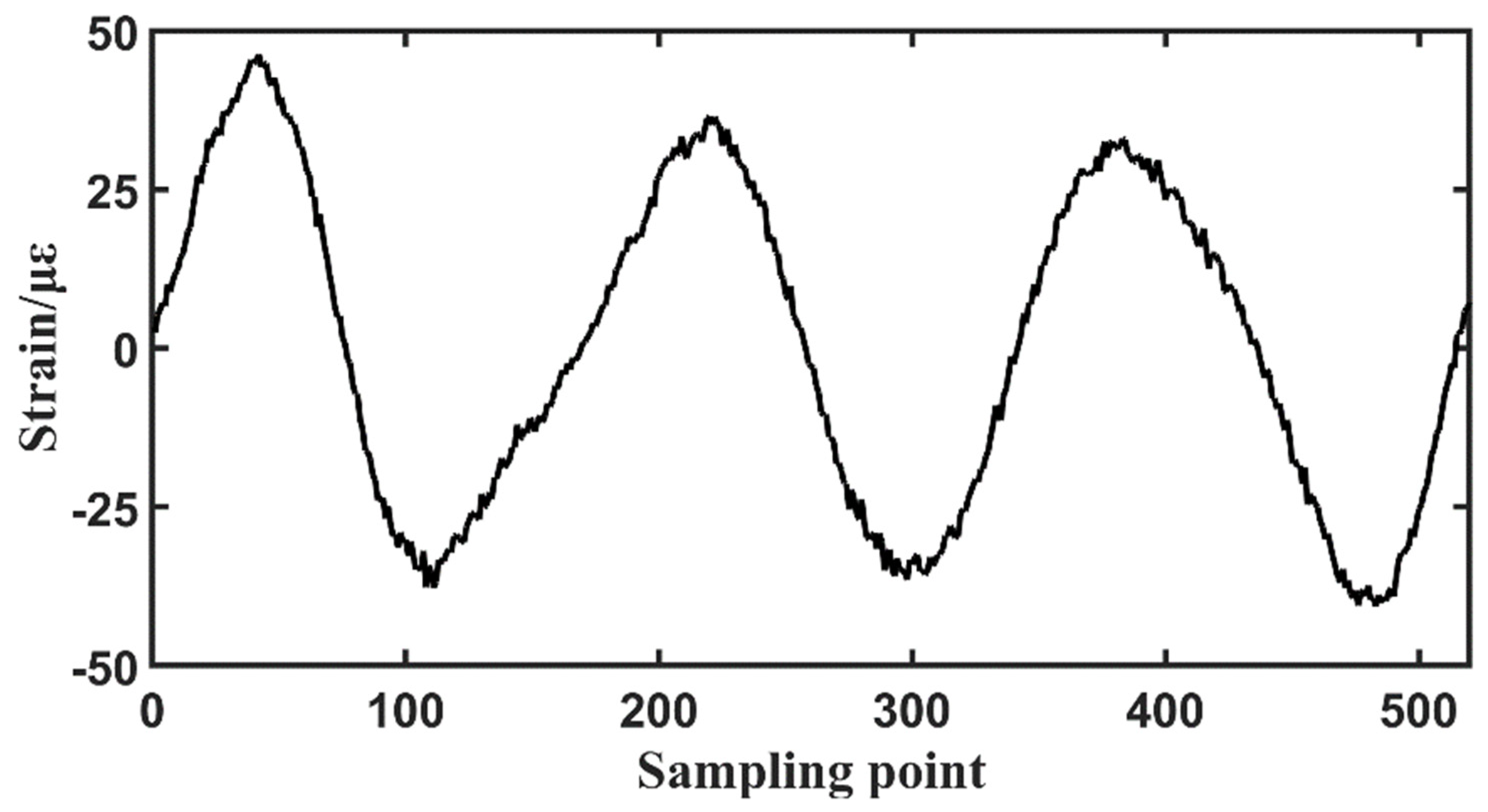
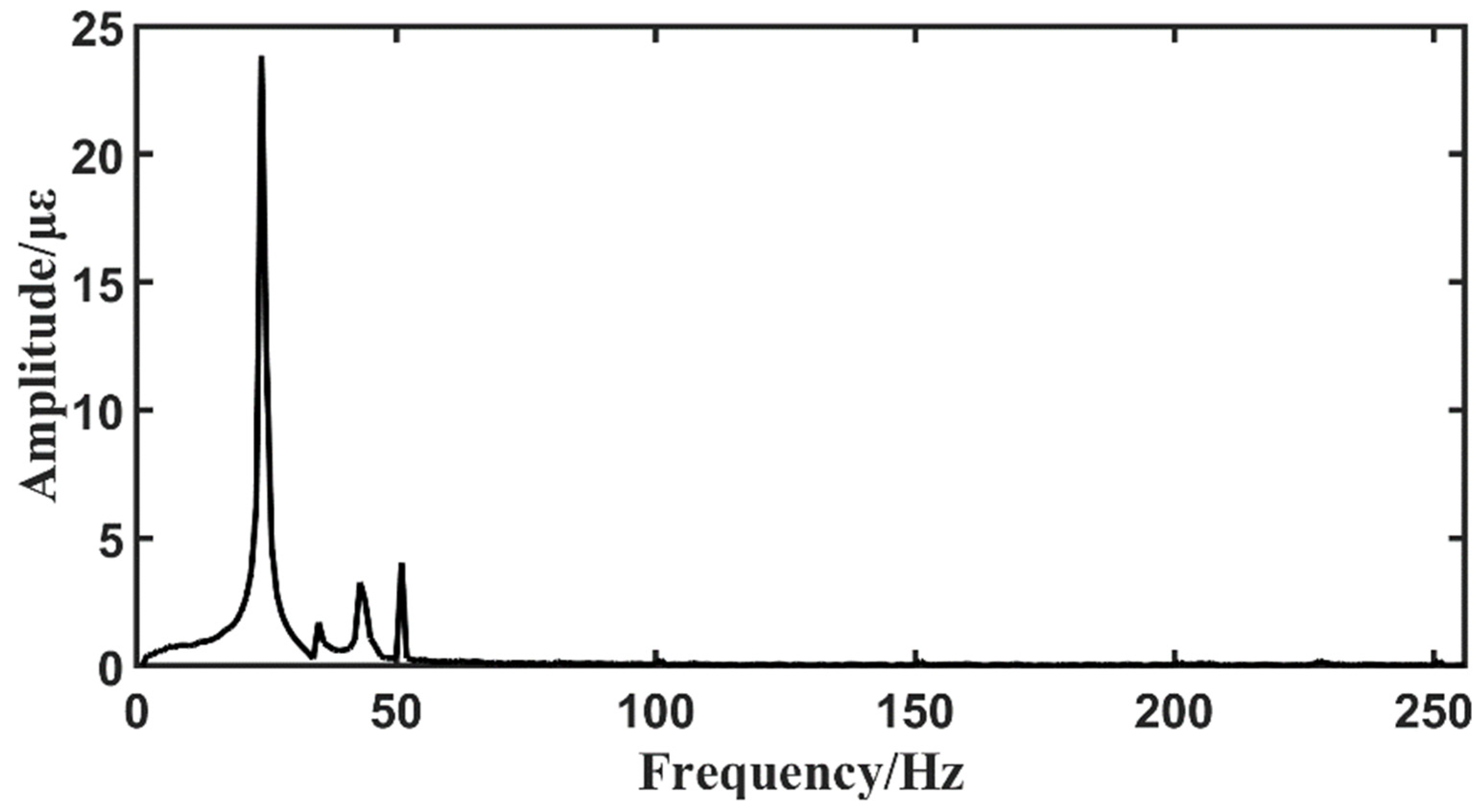
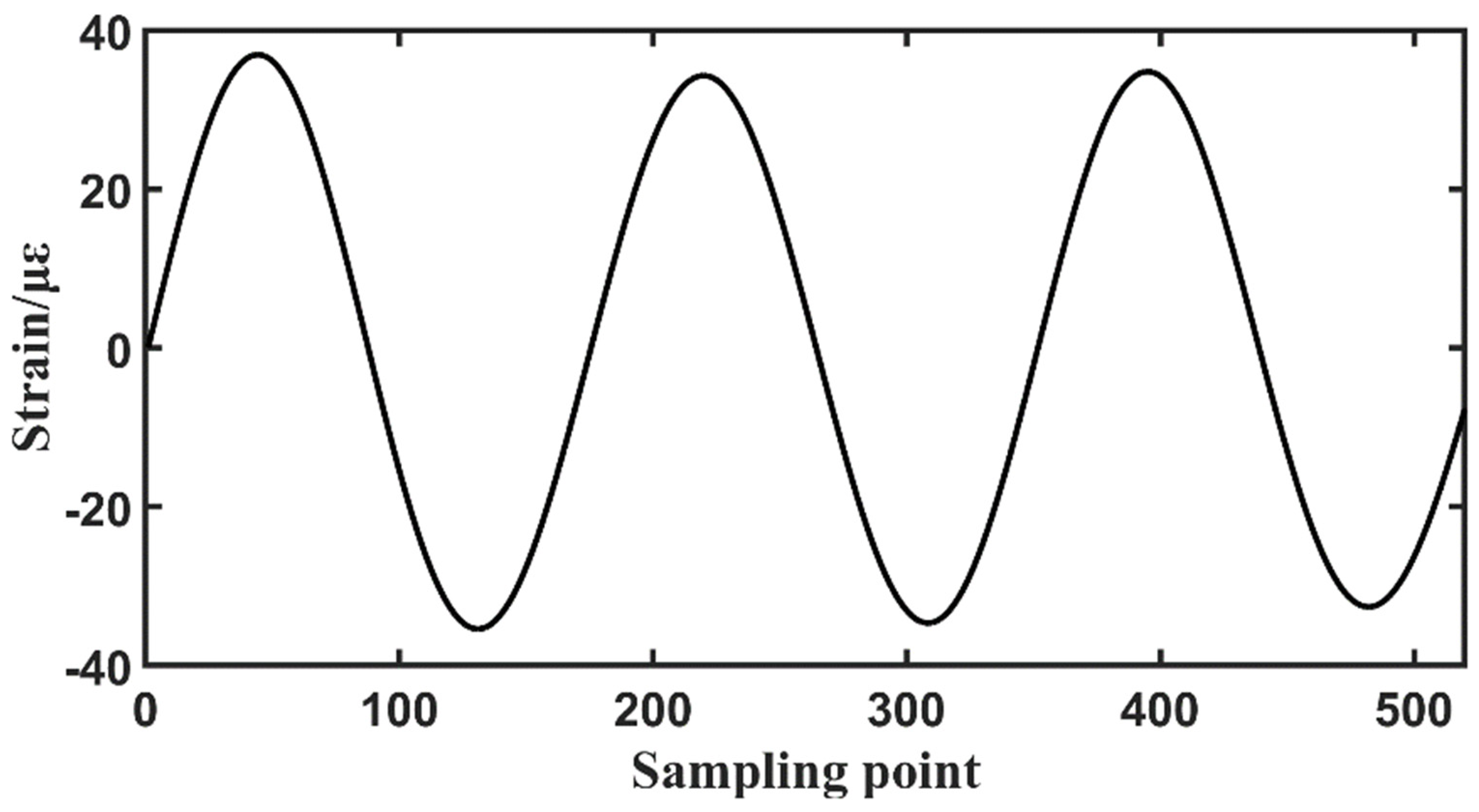
- Response signal noise reduction processing
- (2)
- Standardized processing of impact force signal
- (3)
- Determination of the neural network structure
- (4)
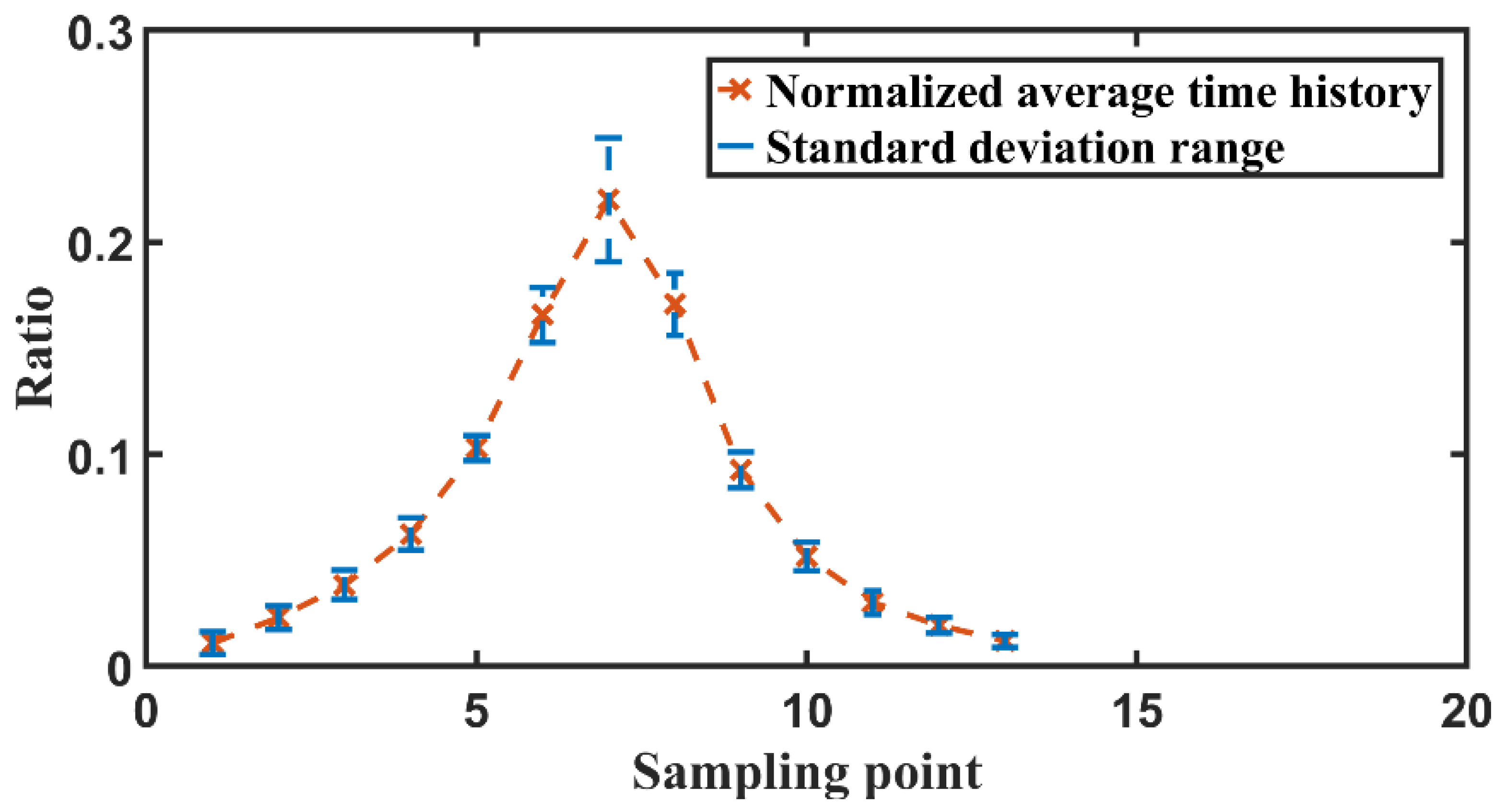
- Acquisition of the average time history of the impact load
4.2.2. Analysis of Identification Effect
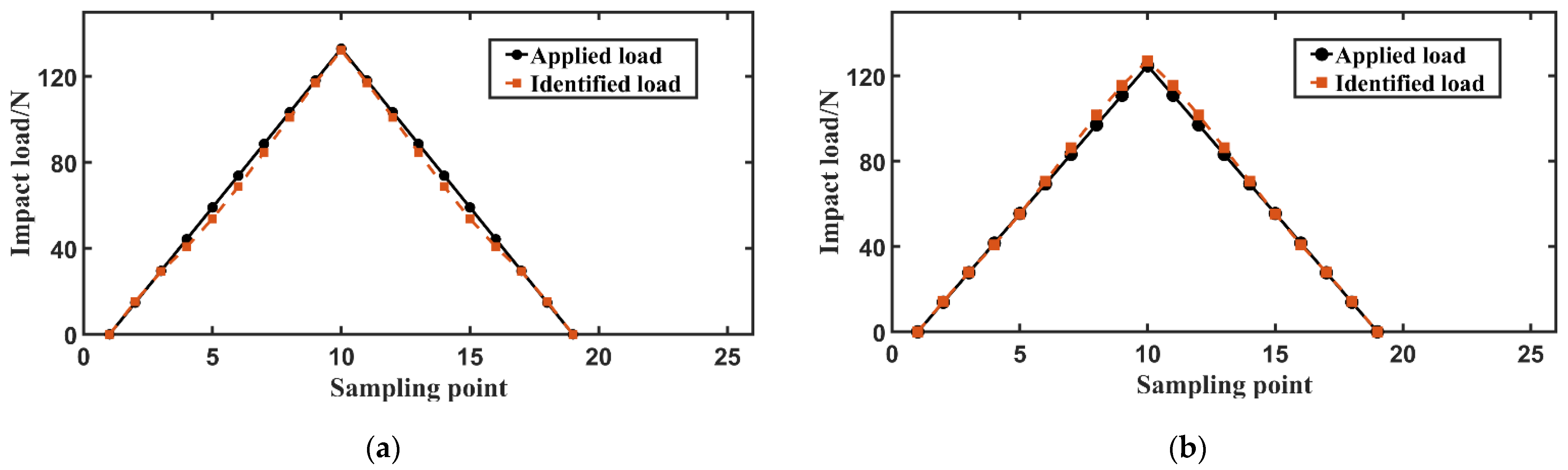
- (1)
- Identification effect of different working conditions
- (2)
- Influence of retaining different order modes on the identification effect
4.3. Analysis, Prospects and Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, X.Y. The Research On Dynamic Test Technology of Weapon Blast off Recoil for Flying Helicoper. Helicopter Technol. 2006, 51–54. [Google Scholar]
- Cheng, W.Z.; Wang, Y.G.; Sun, Y.J.; Zhang, J.H. Identification technique considering nonlinearity of airborne gun recoil. J. Vib. Shock. 2008, 27, 67–70. [Google Scholar]
- Zhou, F.; Zhang, S.; Yan, C. Study on calibrating load test and model for missile pylon. Jixie Qiangdu/J. Mech. Strength 2009, 31, 221–224. [Google Scholar]
- Zheng, J.H.; Shen, L.; Kou, F.J. Flight Test Investigation of the Pylon Loading for Helicopter. Aeronaut. Sci. Technol. 2016, 27, 60–64. [Google Scholar]
- Zhou, P.; Zhang, Q.; Shuai, Z.; Li, W. Review of Research and Development Status of Dynamic Load Identification in Time Domain. Noise Vib. Control. 2014, 34, 6–11. [Google Scholar]
- Choi, K.; Chang, F.K. Identification of Impact Force and Location Using Distributed Sensors. Aiaa, J. 1996, 34, 136–142. [Google Scholar] [CrossRef]
- Yan, G. Bayesian approach for impact load identification of stiffened composite panel. Inverse Probl. Sci. Eng. 2014, 22, 940–965. [Google Scholar] [CrossRef]
- Sun, H.; Büyüköztürk, O. Identification of traffic-induced nodal excitations of truss bridges through heterogeneous data fusion. Smart Mater. Struct. 2015, 24, 075032. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Ma, J.H.; Wu, Y.P. Application of artificial neural network in prediction of abrasion of rubber composites. Mater. Des. 2013, 49, 802–807. [Google Scholar] [CrossRef]
- Wu, Y.-C.; Feng, J.-W. Development and Application of Artificial Neural Network. Wirel. Pers. Commun. 2018, 102, 1645–1656. [Google Scholar] [CrossRef]
- Ali, U.; Muhammad, W.; Brahme, A.; Skiba, O.; Inal, K. Application of artificial neural networks in micromechanics for polycrystalline metals. Int. J. Plast. 2019, 120, 205–219. [Google Scholar] [CrossRef]
- Shi, J.R.; Ma, Y.Y. Research progress and development of deep learning. Comput. Eng. Appl. 2018, 54, 1–10. [Google Scholar]
- Zhang, F.; Zhu, D.M. The Dynamic Load Identification Research Based on Neural Network Model. J. Vib. Eng. 1997, 40–46. [Google Scholar]
- Cao, X.; Sugiyama, Y.; Mitsui, Y. Application of artificial neural networks to load identification. Comput. Struct. 1998, 69, 63–78. [Google Scholar] [CrossRef]
- Staszewski, W.J.; Worden, K.; Wardle, R.; Tomlinson, G.R. Fail-safe sensor distributions for impact detection in composite materials. Smart Mater. Struct. 2000, 9, 298. [Google Scholar] [CrossRef]
- He, F.D.; Shu, C.H. Application of BP Neural Networks Based on Bayesian Regularization to Aircraft Wing Loads Analysis. Flight Dyn. 2009, 27, 85–88. [Google Scholar]
- Cao, S.C.; Yin, Z.P.; Huang, Q.Q.; Kai-Chao, M.A. Development of a Parametric Flight loads Identification Method using Genetic Improved BP Neural Networks. Aeronaut. Comput. Technol. 2013. [Google Scholar]
- Samson, B.C.; Dimaio, D. Static load estimation using artificial neural network: Application on a wing rib. Adv. Eng. Softw. 2018, 125, 113–125. [Google Scholar]
- Chen, G.R.; Li, T.G.; Chen, Q.J.; Ren, S.F.; Wang, C.; Li, S.F. Application of deep learning neural network to identify collision load conditions based on permanent plastic deformation of shell structures. Comput. Mech. 2019, 64, 435–449. [Google Scholar] [CrossRef]
- Zhou, J.M.; Dong, L.; Guan, W.; Yan, J. Impact load identification of nonlinear structures using deep Recurrent Neural Network. Mech. Syst. Signal Processing 2019, 133, 106292. [Google Scholar] [CrossRef]
- Chen, Q.; An, Y. Wing load identification based on neural network. China High New Technol. 2020, 54–55. [Google Scholar]
- Xia, P.; Yang, T.; Xu, J.; Wang, L.; Yang, Z. Reversed time sequence dynamic load identification method using time delay neural network. Acta Aeronaut. Astronaut. Sin. 2021, 42, 224452. [Google Scholar] [CrossRef]
- Feng, T.; Duan, A.; Guo, L.; Gao, H.; Chen, T.; Yu, Y. Deep learning based load and position identification of complex structure. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 1358–1363. [Google Scholar]
- Wang, L.J.; Liu, Y.; Xie, Y.X.; Chen, B.J. Impact load identification of composite laminated cylindrical shell with stochastic characteristic. Arch. Appl. Mech. 2022, 92, 1397–1411. [Google Scholar] [CrossRef]
- Cheng, G. Research on Load Identification Based on Parameter Optimized BP Neural Networks of Double Span Rotor System. Master’s Thesis, Taiyuan University Of Technology, Taiyuan, China, 2018. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 | S2 | S3 | S4 | |
|---|---|---|---|---|
| Coordinates/mm | (10, −14, 0) | (51.6, −17.2, −13.8) | (0, −14, 90.15) | (74.6, −5.2, 71.5) |
| F | |
|---|---|
| Coordinates/mm | (617.6, −59.8, −156.2) |
| Working Condition | Data (Group) | Maximum Relative Error |
|---|---|---|
| Single pylon | 527 | 7.21% |
| Double pylon | 459 | 6.93% |
| Mode | First Order | First Second Order | First Third Order |
|---|---|---|---|
| Maximum relative error | 6.05% | 7.21% | 8.76% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Yu, X.; Chen, L.; Huang, D. Impact Load Identification Algorithm of Helicopter Weapon Pylon Based on Time-Domain Response Signal. Aerospace 2022, 9, 388. https://doi.org/10.3390/aerospace9070388
Gao Y, Yu X, Chen L, Huang D. Impact Load Identification Algorithm of Helicopter Weapon Pylon Based on Time-Domain Response Signal. Aerospace. 2022; 9(7):388. https://doi.org/10.3390/aerospace9070388
Chicago/Turabian StyleGao, Yadong, Xinyu Yu, Likun Chen, and Dawei Huang. 2022. "Impact Load Identification Algorithm of Helicopter Weapon Pylon Based on Time-Domain Response Signal" Aerospace 9, no. 7: 388. https://doi.org/10.3390/aerospace9070388
APA StyleGao, Y., Yu, X., Chen, L., & Huang, D. (2022). Impact Load Identification Algorithm of Helicopter Weapon Pylon Based on Time-Domain Response Signal. Aerospace, 9(7), 388. https://doi.org/10.3390/aerospace9070388