
Research on Game Theory of Air Traffic Management Cyber Physical System Security


Abstract
:1. Introduction
- (1)
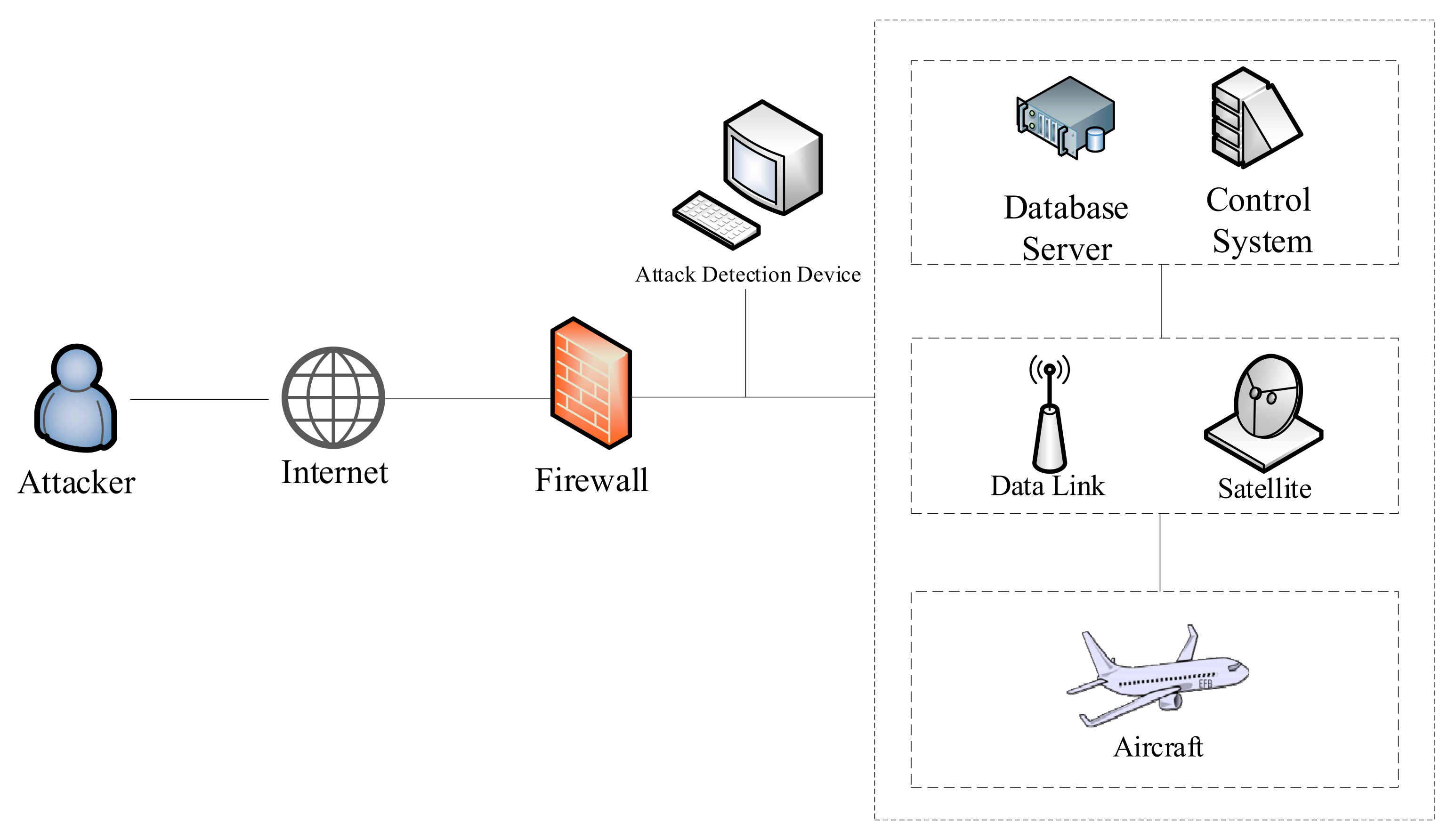
- Focus on the application of the CPS in the ATM field, and design the architecture of the ATMCPS.
- (2)
- Pay attention to the judgment of the system defender on the real attack intention when two attack types exist at the same time and the attacker will camouflage the attack type. The game model is established based on the dynamic Bayesian game, and the system defender will update the belief according to the detected attack characteristics, which is more in line with the actual attack and defense scenarios.
2. Related Work
- (1)
- Most researches are based on cyber attacks or physical attacks. There is a lack of relevant research on how to choose a protection strategy when the two types of attacks exist at the same time.
- (2)
- Most researches are based on complete information games or static games, and there is still a certain gap between offensive and defensive situations in real life.
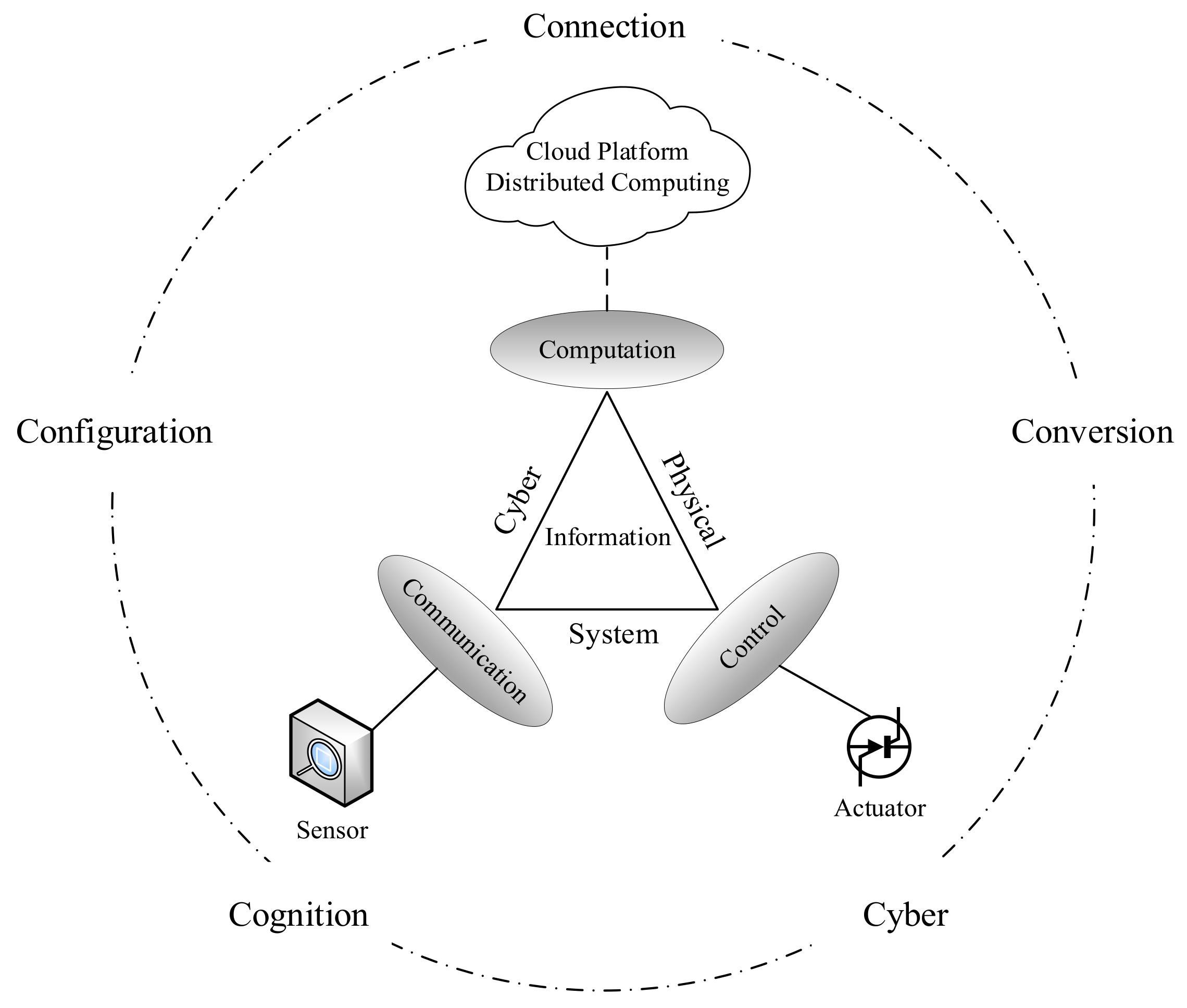
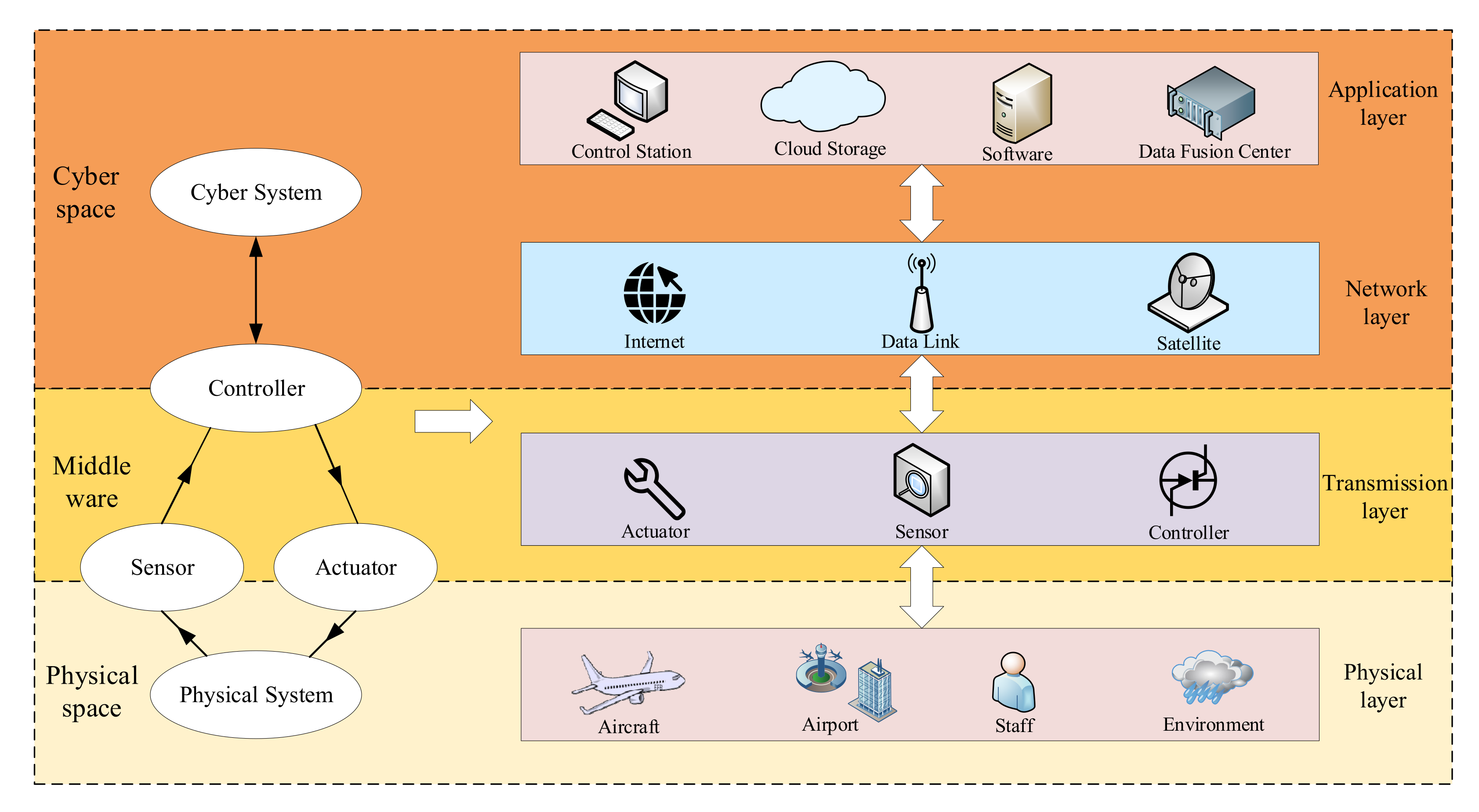
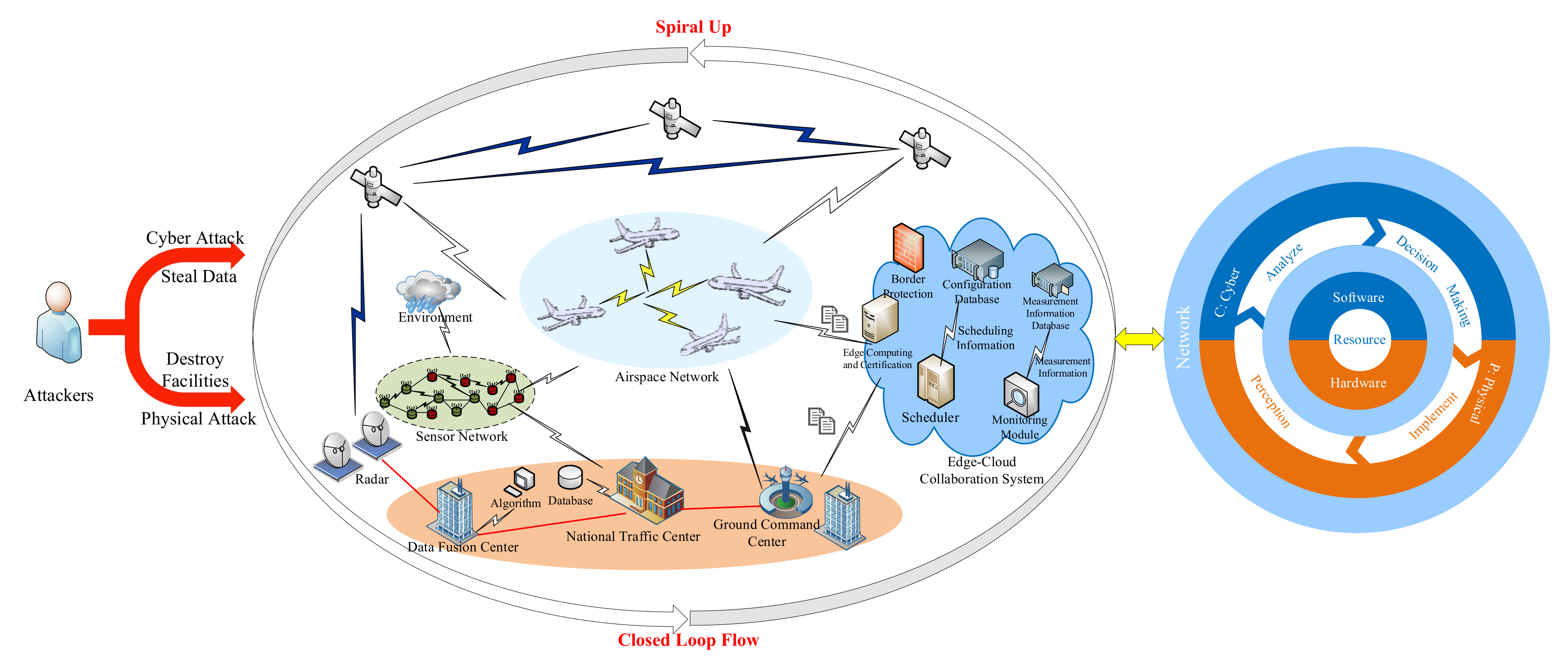
3. Design of Air Traffic Management Cyber Physical System
- (1)
- Physical Layer
- (2)
- Transmission Layer
- (3)
- Network Layer
- (4)
- Application Layer
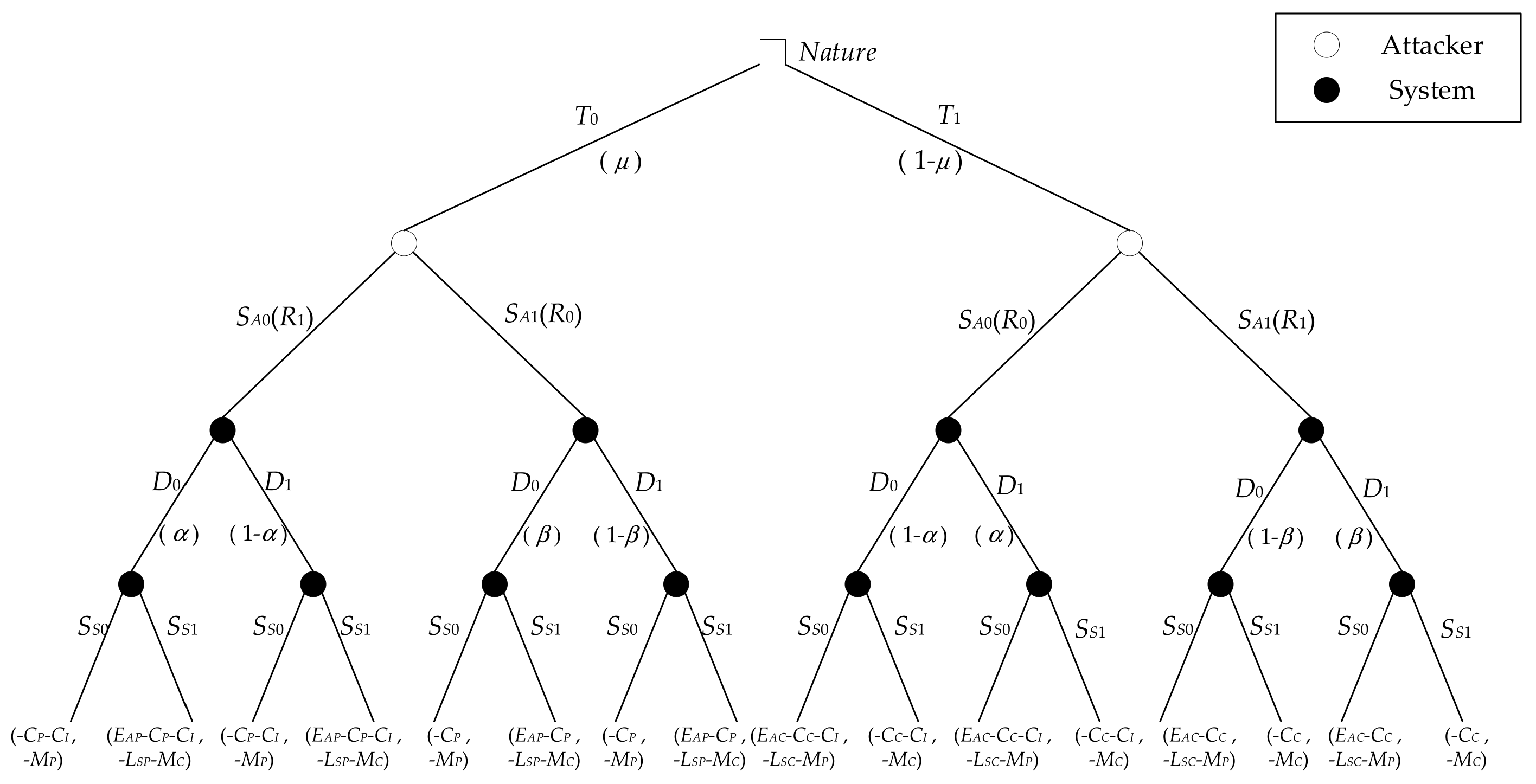
4. Dynamic Bayesian Game Model of ATMCPS
4.1. Game Model Definition
- (1)
- represents the set of participants. PA stands for attacker, PS stands for system defender, and PN stands for “Nature” in the Harsanyi transformation.
- (2)
- represents the set of strategy. is the attacker’s strategy set, SA0 means that the attacker camouflage the attack type, SA1 means that the attacker does not camouflage the attack type. is the defender’s strategy set, SS0 is physical protection, and SS1 is cyber protection.
- (3)
- represents the set of income functions. UA represents the income function of the attacker, and US represents the income function of the system.
- (4)
- represents the set of attack types. T0 means physical attack, T1 means cyber attack.
- (5)
- represents the set of attack types displayed by the attacker after the camouflage or non-camouflage strategy. R0 represents that the attack feature displayed by the attacker is a physical attack, and R1 represents the attack feature displayed by the attacker is a cyber attack. For example, if an attacker conducts a camouflage strategy for an attack of type T0, the attack feature displayed is R1, and if a non-camouflage strategy is performed, the displayed attack feature is R0.
- (6)
- represents the set of attack types detected by the system’s attack detection device. D0 indicates that the detection result is a physical attack, and D1 indicates that the detection result is a cyber attack.
- (7)
- represents a set of beliefs. F0 represents the initial belief of the defender, and F1 represents the updated posterior belief of the defender.
4.2. Symbol Description
4.3. Model Assumption
4.4. Offensive and Defensive Game Process
- (1)
- Before the attack occurs, the defender has an initial belief about the type of attack according to the existing information and historical data, that is, the defender has an initial judgment on the probability of the attacker launching a physical attack;
- (2)
- The defender has a partial understanding of the attacker’s behavior. For example, the defender can know that the attacker will camouflage the attack type when launching a physical attack, but will not camouflage the attack type when launching a cyber attack;
- (3)
- When the system is attacked, the attack detection device detects and judges the attack type according to the attack characteristics;
- (4)
- The defender updates the posterior belief according to the initial belief, the detection success rate of the attack detection device, and the detected attack type. For example, calculating the probability that the actual attack type is a physical attack when a physical attack is detected, and the probability that the actual attack type is a cyber attack when a cyber attack is detected;
- (5)
- Calculate the expected income under the combination of strategies and determine the protection strategies according to the initial belief, the posterior belief, the cost of physical protection and cyber protection, and the loss of physical attack and cyber attack. For example, if the attacker’s strategy is: when launching a physical attack, the attack type will be camouflaged, and when launching a cyber attack, the attack type will not be camouflaged. The defender selects physical protection when detecting a physical attack, and selects cyber protection when detecting a cyber attack. This combination of strategies can minimize the loss of the system. The defender will choose this set of strategies.
4.5. Belief Renewal
4.6. Income Matrix
4.7. Proof of Equilibrium Existence
5. Analysis of Performance
- (1)
- Parameter Definition
- (2)
- Posterior Belief
- (3)
- Income and Equilibrium Analysis
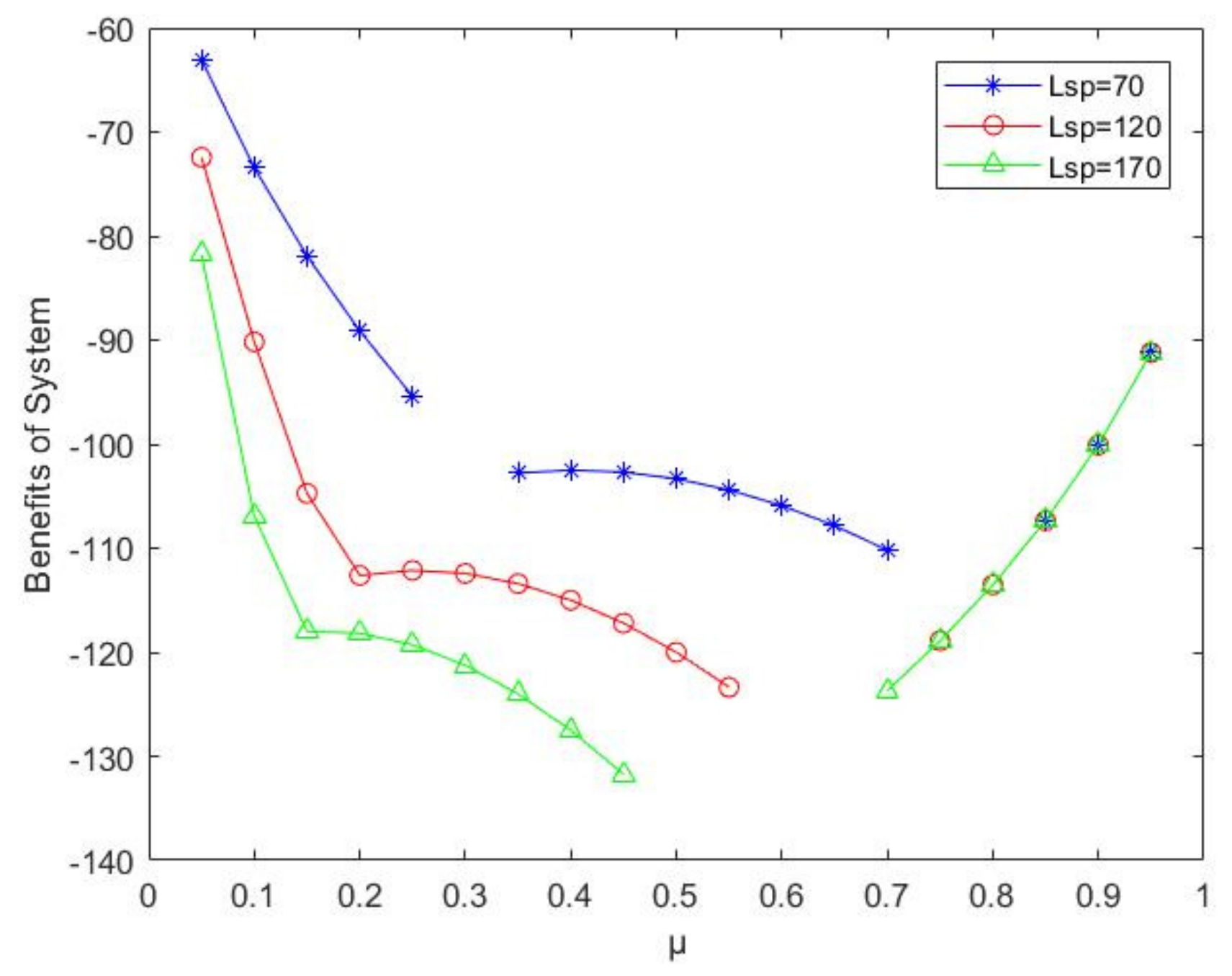
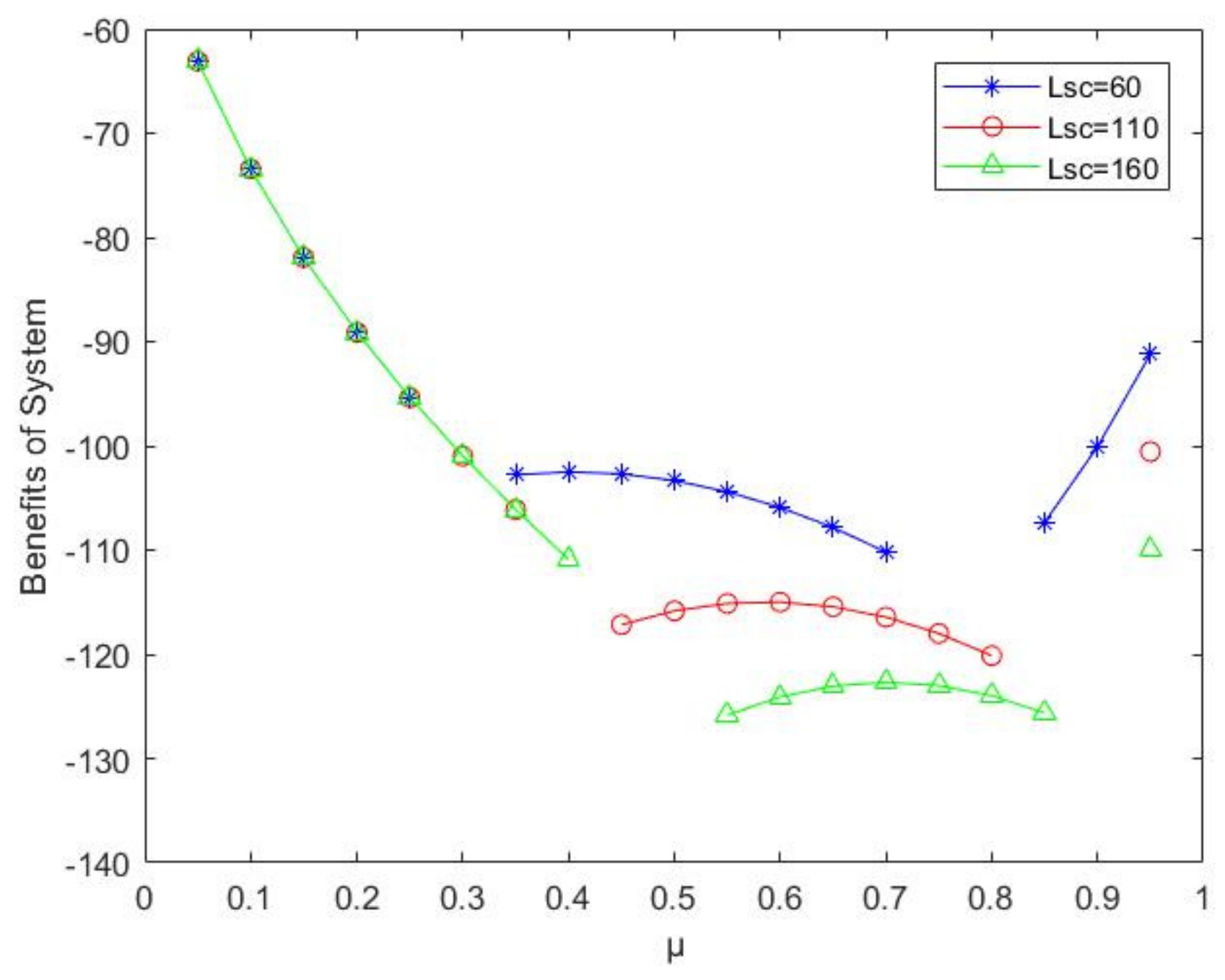
- (4)
- Parametric Analysis
- (5)
- Model Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jia, X.; Zheng, B.; Liu, X.; Jia, Z. Security control of cyber-physical systems with input quantization. Sci. Technol. Eng. 2020, 20, 12897–12903. [Google Scholar] [CrossRef]
- Li, L. China’s manufacturing locus in 2025: With a comparison of “Made-in-China 2025” and “Industry 4.0”. Technol. Forecast. Soc. Chang. 2018, 135, 66–74. [Google Scholar] [CrossRef]
- Bouk, S.H.; Ahmed, S.H.; Eun, Y.; Park, K.-J. Multimodal Named Data Discovery with Interest Broadcast Suppression for Vehicular CPS. IEEE Trans. Mob. Comput. 2020, 20, 1877–1891. [Google Scholar] [CrossRef]
- Lee, J.; Bagheri, B.; Kao, H.A. A Cyber-Physical Systems architecture for industry 4.0-based manufacturing systems. Manuf. Lett. 2015, 3, 18–23. [Google Scholar] [CrossRef]
- Wang, L.; Huang, T. Application of Cyber-physical System in Aviation. Aeronaut. Comput. Tech. 2013, 43, 117–119. [Google Scholar] [CrossRef]
- Nourian, A.; Madnick, S. A Systems Theoretic Approach to the Security Threats in Cyber Physical Systems Applied to Stuxnet. IEEE Trans. Dependable Secur. Comput. 2015, 15, 2–13. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H. Research on Security Theory for Cyber-Physical Systems. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2015. [Google Scholar]
- Wang, Y.; Wang, Y.; Zhang, L.; Zhang, L. Analysis and defense of the BlackEnergy malware in the Ukrainian electric power system. Chin. J. Netw. Inf. Secur. 2017, 3, 46–53. [Google Scholar] [CrossRef]
- Sampigethaya, K.; Poovendran, R. Aviation Cyber–Physical Systems: Foundations for Future Aircraft and Air Transport. Proc. IEEE 2013, 101, 1834–1855. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, L. Physical and cyber convergence approach to design future complex aviation cyber physical systems. In Proceedings of the 2015 6th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 23–25 September 2015. [Google Scholar] [CrossRef]
- Alrefaei, F.; Alzahrani, A.; Song, H.; Zohdy, M.; Alrefaei, S. Cyber Physical Systems, a New Challenge and Security Issue for the Aviation. In Proceedings of the 2021 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Toronto, ON, Canada, 21–24 April 2021. [Google Scholar] [CrossRef]
- Wang, X.; Miao, S.; He, M.; Liu, M. Node ranking of air traffic information physical system based on improved K-shell algorithm. China Sciencepaper 2020, 15, 1144–1149. [Google Scholar] [CrossRef]
- Shaikh, F.; Rahouti, M.; Ghani, N.; Xiong, K.; Bou-Harb, E.; Haque, J. A Review of Recent Advances and Security Challenges in Emerging E-Enabled Aircraft Systems. IEEE Access 2019, 7, 63164–63180. [Google Scholar] [CrossRef]
- Li, L. The Research on Security Control of Cyber-Physical Systems under Denial-of-Service Attacks. Master’s Thesis, Lanzhou University of Technology, Lanzhou, China, 2020. [Google Scholar]
- Tai, W. Research on Game Theory Based Cyber Attack-Defense Strategies in Cyber Physical Power Systems. Master’s Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Orojloo, H.; Azgomi, M.A. A game-theoretic approach to model and quantify the security of cyber-physical systems. Comput. Ind. 2017, 88, 44–57. [Google Scholar] [CrossRef]
- Jithish, J.; Sankaran, S.; Achuthan, K. Towards Ensuring Trustworthiness in Cyber-Physical Systems: A Game-Theoretic Approach. In Proceedings of the 2020 International Conference on COMmunication Systems & NETworkS (COMSNETS), Bengaluru, India, 7–11 January 2020. [Google Scholar] [CrossRef]
- Yan, B.; Yao, P.; Wang, J.; Yang, T.; Ruan, W.; Yang, Q. Game Theoretical Dynamic Cybersecurity Defense Strategy for Electrical Cyber Physical Systems. In Proceedings of the 2021 IEEE 5th Conference on Energy Internet and Energy System Integration (EI2), Taiyuan, China, 22–25 October 2021. [Google Scholar] [CrossRef]
- Li, J.; Li, T. Cyber-physical Security Analysis of Smart Grids with Bayesian Sequential Game Models. Acta Autom. Sin. 2019, 45, 98–109. [Google Scholar] [CrossRef]
- Kammuller, F.; Kerber, M. Investigating Airplane Safety and Security Against Insider Threats Using Logical Modeling. In Proceedings of the 2016 IEEE Security and Privacy Workshops (SPW), San Jose, CA, USA, 22–26 May 2016. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Wu, Z.; Wu, Y.; Wang, Q.; Yin, Y. ATMChain: Blockchain-Based Solution to Security Problems in Air Traffic Management. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021. [Google Scholar] [CrossRef]
- Tan, X.; Xu, L.; Ni, J.; Li, S.; Jiang, X.; Zheng, Q. Game Theory Based Dynamic Adaptive Video Streaming for Multi-Client Over NDN. IEEE Trans. Multimed. 2021, 24, 3491–3505. [Google Scholar] [CrossRef]
- Geng, H.; Lu, H.; Huang, M.; Sun, S.; Zheng, C. Design Decision of Protection Engineering Based on Dynamic Bayesian Game. J. Ordnance Equip. Eng. 2020, 41, 209–215. [Google Scholar] [CrossRef]
- Gao, B.; Shi, L. Modeling an Attack-Mitigation Dynamic Game-Theoretic Scheme for Security Vulnerability Analysis in a Cyber-Physical Power System. IEEE Access 2020, 8, 30322–30331. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attack Strategy | Posterior Belief | |
|---|---|---|
| (T0, SA0), (T1, SA0) | ||
| (T0, SA0), (T1, SA1) | ||
| (T0, SA1), (T1, SA0) | ||
| (T0, SA1), (T1, SA1) | ||
| (T0, SA0), (T1, SA0) | (T0, SA1), (T1, SA0) | |
| (D0, SS0), (D1, SS0) | ||
| (D0, SS0), (D1, SS1) | ||
| (D0, SS1), (D1, SS0) | ||
| (D0, SS1), (D1, SS1) | ||
| (T0, SA0), (T1, SA1) | (T0, SA1), (T1, SA1) | |
| (D0, SS0), (D1, SS0) | ||
| (D0, SS0), (D1, SS1) | ||
| (D0, SS1), (D1, SS0) | ||
| (D0, SS1), (D1, SS1) |
| (T0, SA0) (T1, SA0) | (D0, SS0) (D1, SS0) | |
| (D0, SS0) (D1, SS1) | ||
| (D0, SS1) (D1, SS0) | ||
| (D0, SS1) (D1, SS1) | ||
| (T0, SA0) (T1, SA1) | (D0, SS0) (D1, SS0) | |
| (D0, SS0) (D1, SS1) | ||
| (D0, SS1) (D1, SS0) | ||
| (D0, SS1) (D1, SS1) | ||
| (T0, SA1) (T1, SA0) | (D0, SS0) (D1, SS0) | |
| (D0, SS0) (D1, SS1) | ||
| (D0, SS1) (D1, SS0) | ||
| (D0, SS1) (D1, SS1) | ||
| (T0, SA1) (T1, SA1) | (D0, SS0) (D1, SS0) | |
| (D0, SS0) (D1, SS1) | ||
| (D0, SS1) (D1, SS0) | ||
| (D0, SS1) (D1, SS1) |
| Parameter | CP | CC | CI | EAP | EAC |
|---|---|---|---|---|---|
| Value | 18 | 12 | 9 | 50 | 40 |
| Parameter | μ | α | β | MP | MC | LSP | LSC |
|---|---|---|---|---|---|---|---|
| Value | 0.4 | 0.6 | 0.8 | 40 | 25 | 70 | 60 |
| Posterior Belief | p(T0|D0) | p(T1|D0) | p(T0|D1) | p(T1|D1) |
|---|---|---|---|---|
| (T0, SA0), (T1, SA0) | 0.5 | 0.5 | 0.3 | 0.7 |
| (T0, SA0), (T1, SA1) | 0.67 | 0.33 | 0.25 | 0.75 |
| (T0, SA1), (T1, SA0) | 0.57 | 0.43 | 0.18 | 0.82 |
| (T0, SA1), (T1, SA1) | 0.73 | 0.27 | 0.14 | 0.86 |
| Corresponding Type T | Attack Strategy SA | UA(SA, SS) | |||
|---|---|---|---|---|---|
| D0 | D1 | ||||
| SS0 | SS1 | SS0 | SS1 | ||
| T0 | SA0 | −27 | 23 | −27 | 23 |
| SA1 | −18 | 32 | −18 | 32 | |
| T1 | SA0 | 19 | −21 | 19 | −21 |
| SA1 | 28 | −12 | 28 | −12 | |
| Corresponding Type D | Protection Strategy SS | US(SA, SS) | |||
|---|---|---|---|---|---|
| T0 | T1 | ||||
| SA0 | SA1 | SA0 | SA1 | ||
| D0 | SS0 | −40 | −40 | −100 | −100 |
| SS1 | −95 | −95 | −25 | −25 | |
| D1 | SS0 | −40 | −40 | −100 | −100 |
| SS1 | −95 | −95 | −25 | −25 | |
| Income | (D0, SS0), (D1, SS0) | (D0, SS0), (D1, SS1) | (D0, SS1), (D1, SS0) | (D0, SS1), (D1, SS1) |
|---|---|---|---|---|
| (T0, SA0), (T1, SA0) | (−8, −151.54) | (−12, −116.54) | (6, −141.54) | (2, −106.54) |
| (T0, SA0), (T1, SA1) | (1, −145) | (−11, −102.5) | (23, −156.67) | (11, −114.17) |
| (T0, SA1), (T1, SA0) | (1, −154.8) | (−13, −103.44) | (25, −154.09) | (11, −102.73) |
| (T0, SA1), (T1, SA1) | (10, −147.79) | (−12, −91.36) | (42, −167.34) | (20, −110.91) |
| Income | (D0, SS0), (D1, SS0) | (D0, SS0), (D1, SS1) | (D0, SS1), (D1, SS0) | (D0, SS1), (D1, SS1) |
|---|---|---|---|---|
| (T0, SA0), (T1, SA0) | (−8, −113.89) | (−12, −136.03) | (6, −153.03) | (2, −175.17) |
| (T0, SA0), (T1, SA1) | (1, −114.81) | (−11, −127.99) | (23, −161.59) | (11, −174.77) |
| (T0, SA1), (T1, SA0) | (1, −128.42) | (−13, −125.92) | (25, −171.32) | (11, −168.82) |
| (T0, SA1), (T1, SA1) | (10, −133.56) | (−12, −117.79) | (42, −182.34) | (20, −166.57) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Dong, R.; Wang, P. Research on Game Theory of Air Traffic Management Cyber Physical System Security. Aerospace 2022, 9, 397. https://doi.org/10.3390/aerospace9080397
Wu Z, Dong R, Wang P. Research on Game Theory of Air Traffic Management Cyber Physical System Security. Aerospace. 2022; 9(8):397. https://doi.org/10.3390/aerospace9080397
Chicago/Turabian StyleWu, Zhijun, Ruochen Dong, and Peng Wang. 2022. "Research on Game Theory of Air Traffic Management Cyber Physical System Security" Aerospace 9, no. 8: 397. https://doi.org/10.3390/aerospace9080397
APA StyleWu, Z., Dong, R., & Wang, P. (2022). Research on Game Theory of Air Traffic Management Cyber Physical System Security. Aerospace, 9(8), 397. https://doi.org/10.3390/aerospace9080397