
Numerical Analysis on the Aerodynamic Characteristics of an X-wing Flapping Vehicle with Various Tails



Abstract
:1. Introduction
2. Numerical Simulation Method
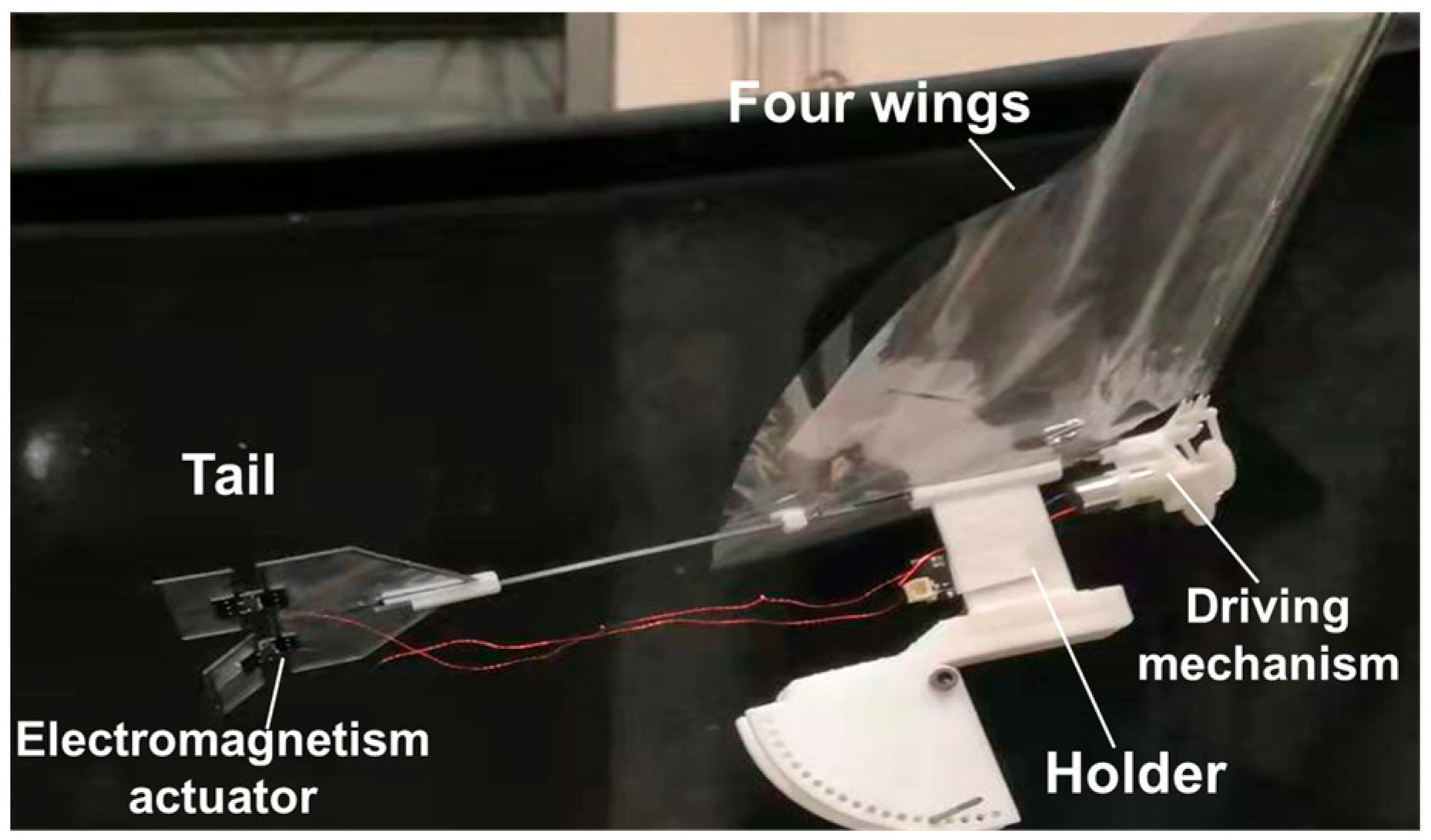
2.1. Reference Experimental Setup
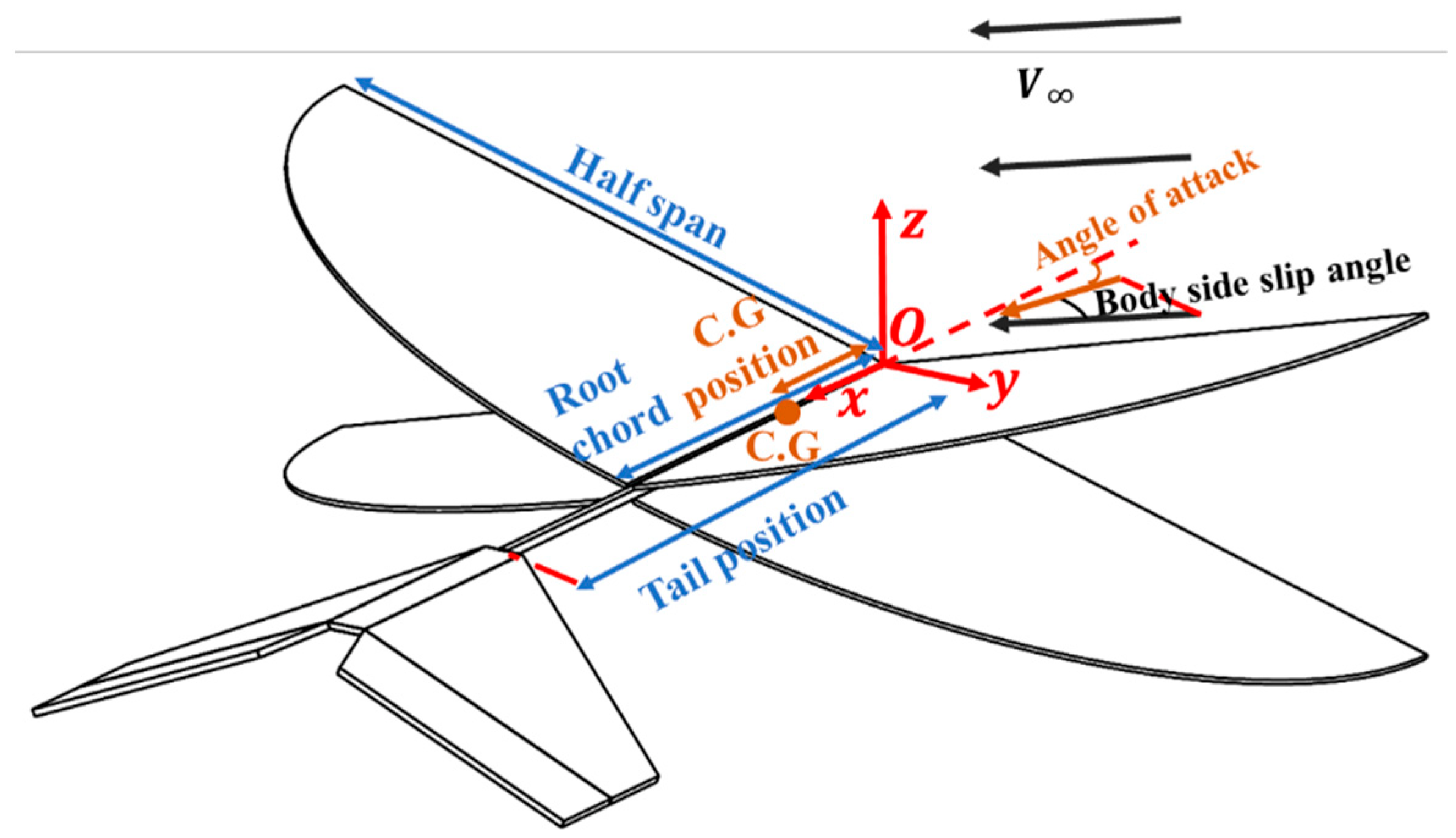
2.2. Model Parameters
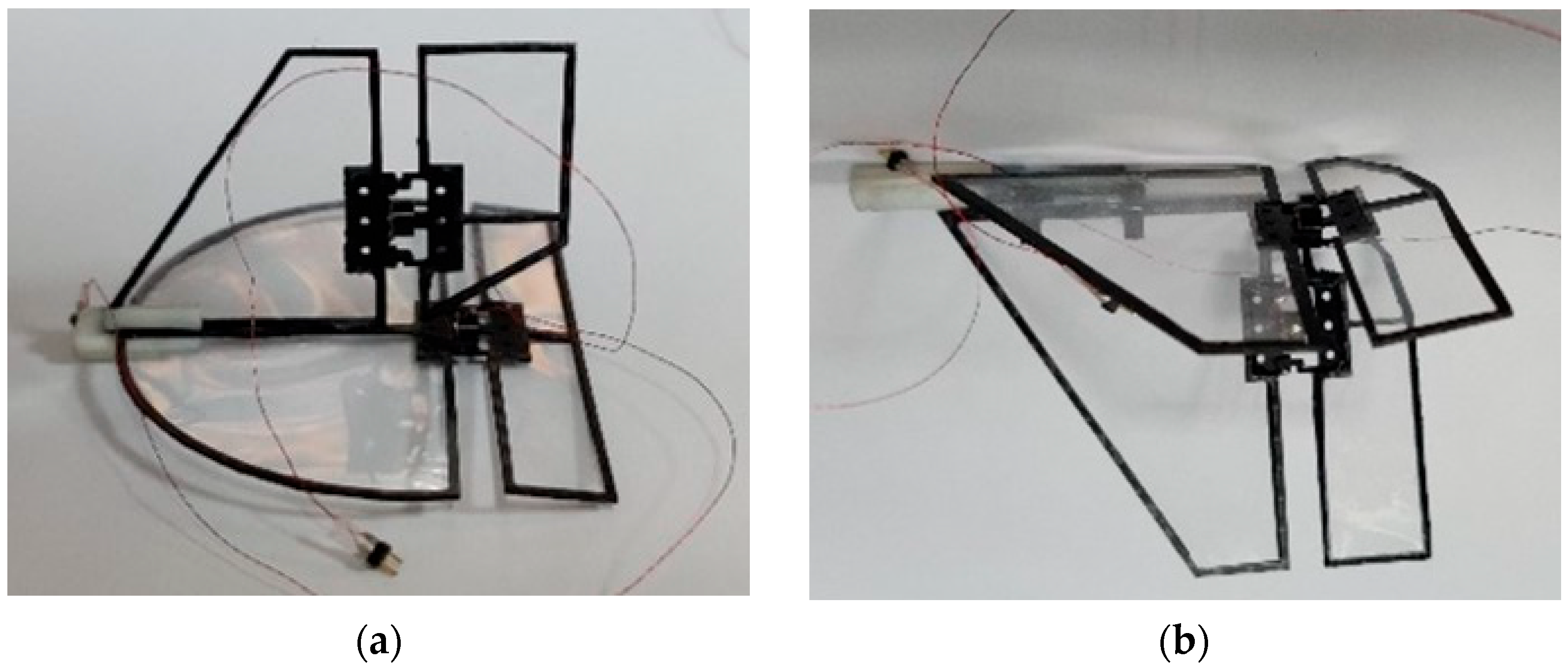
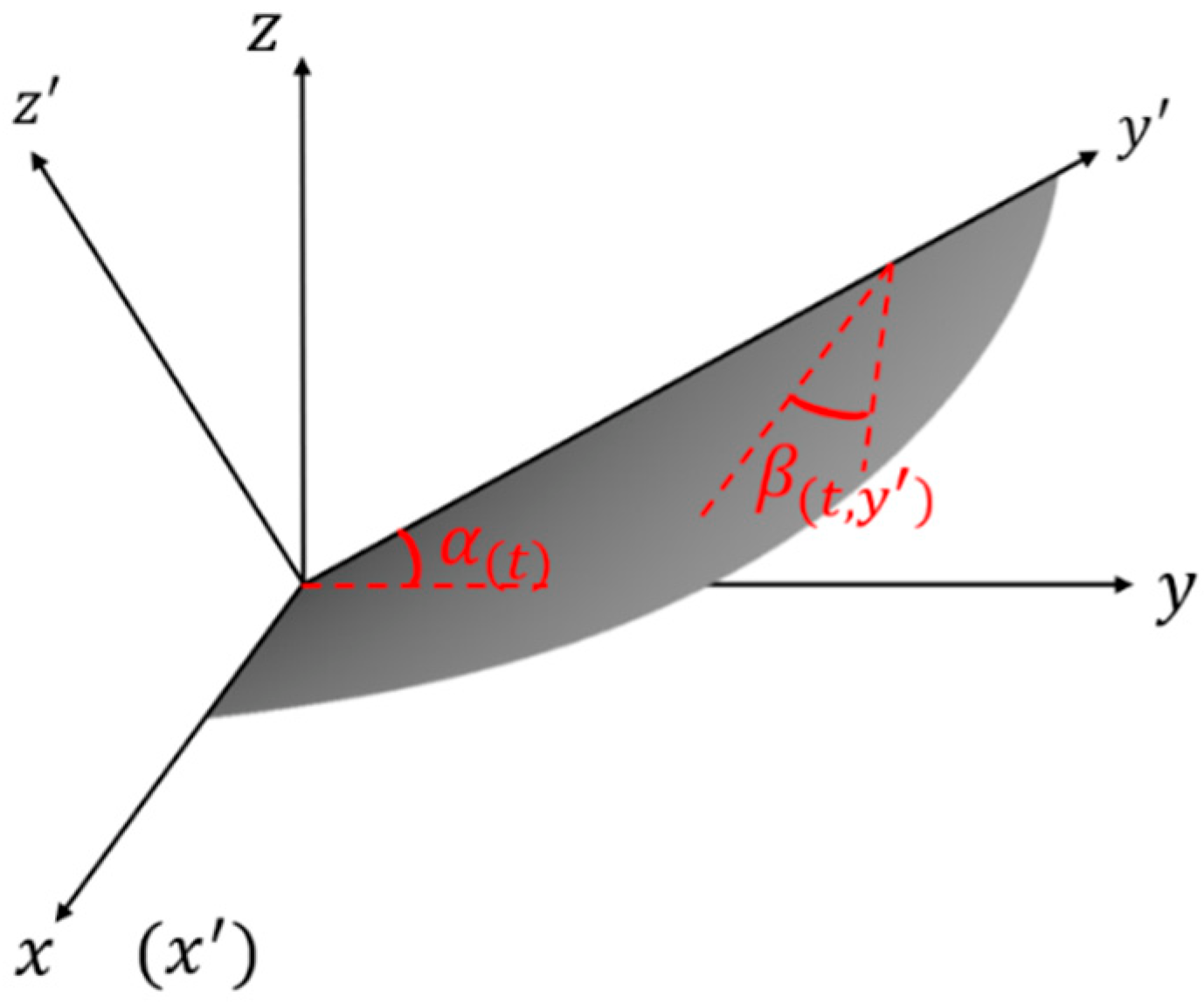
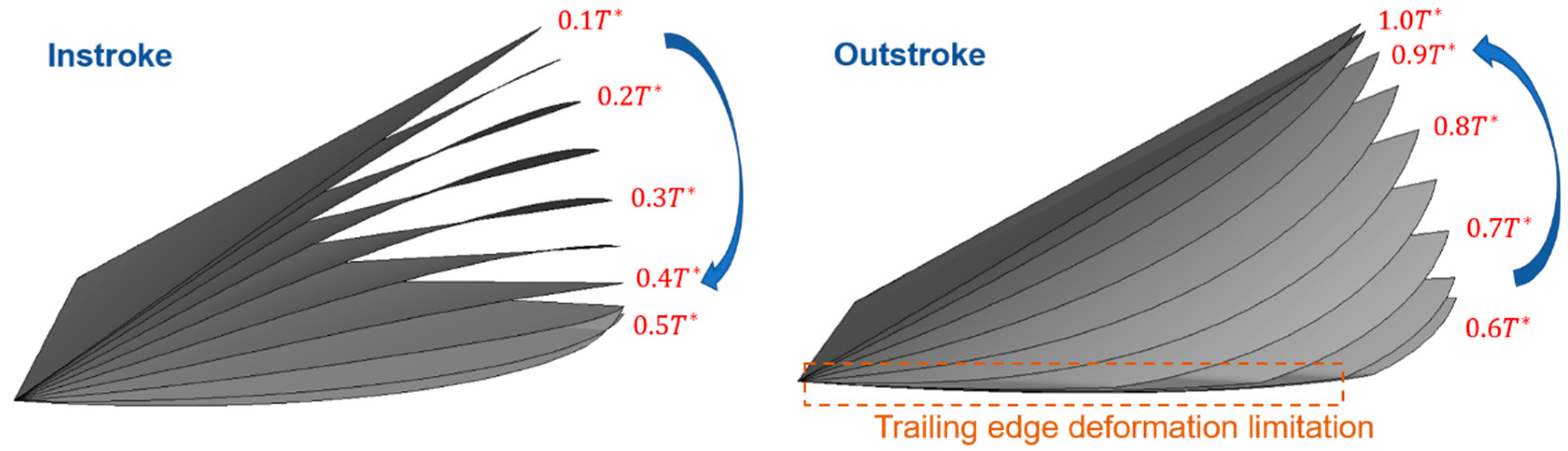
2.2.1. Wings Model
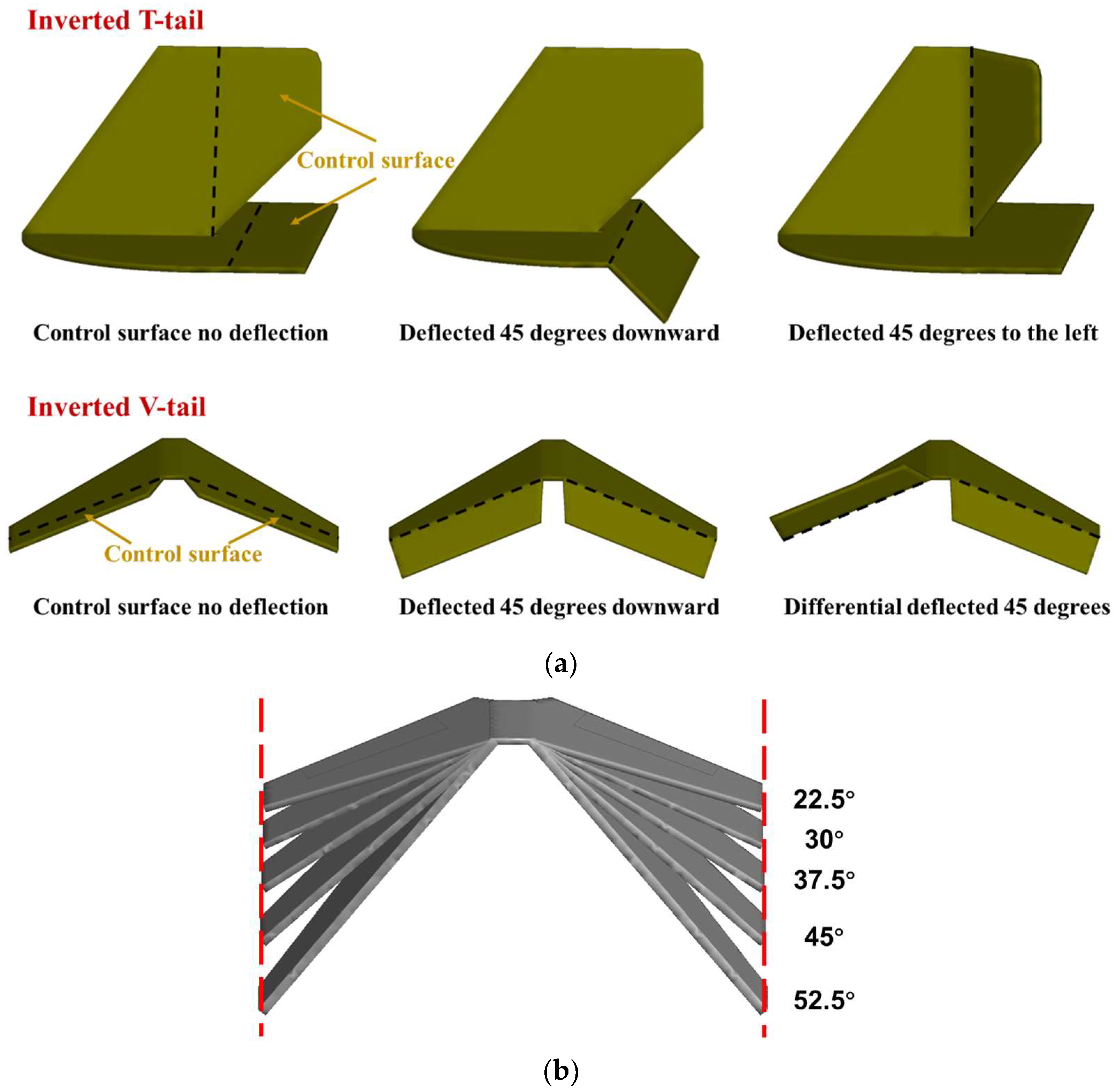
2.2.2. Tail Models
2.3. CFD Method
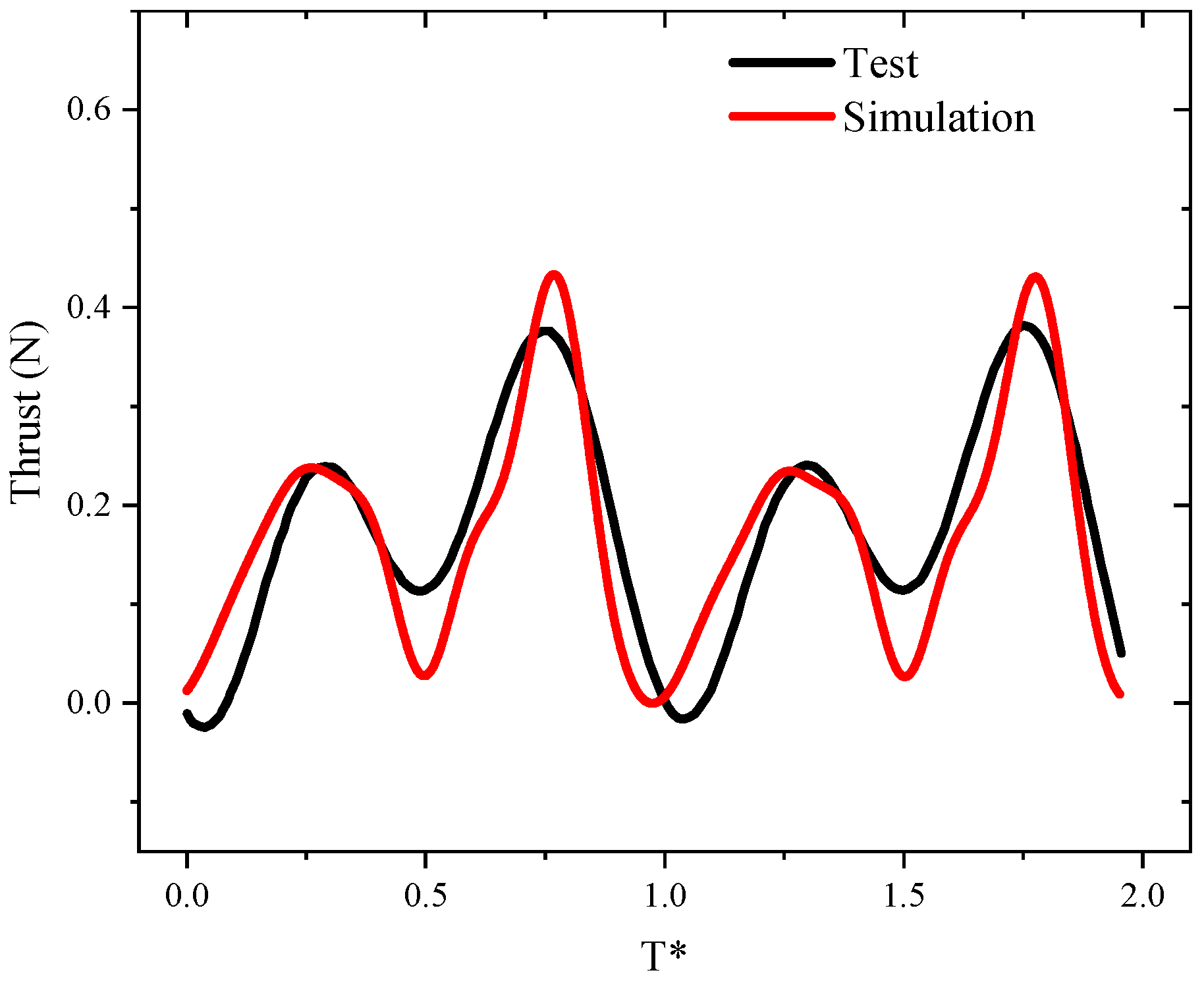
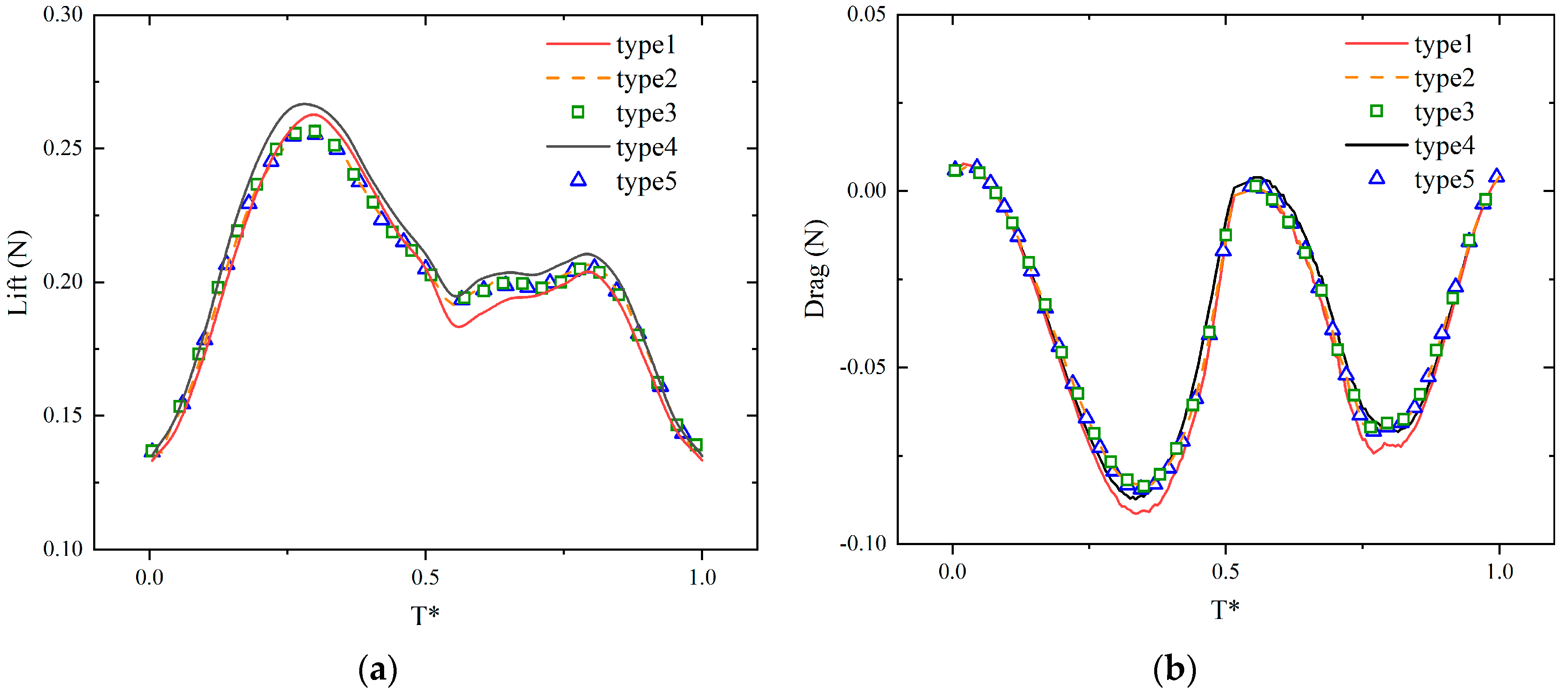
2.4. Numerical Methods Validation
3. Results and Discussions
3.1. Analysis of Aerodynamic Characteristics
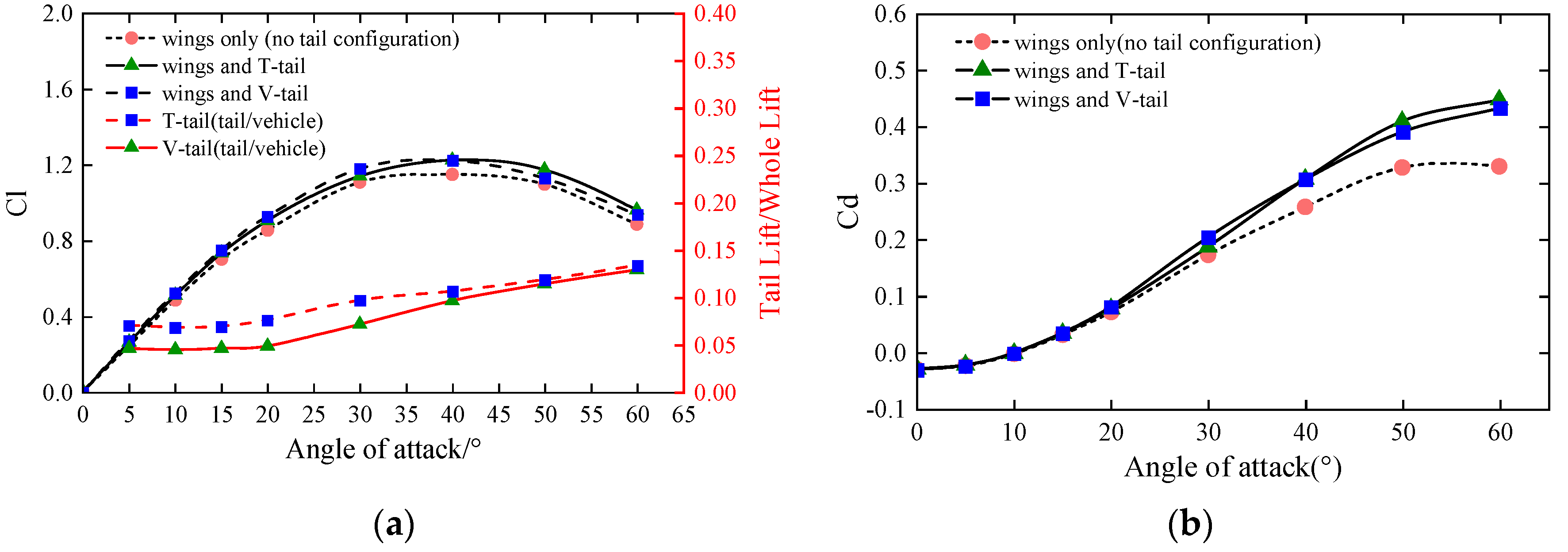
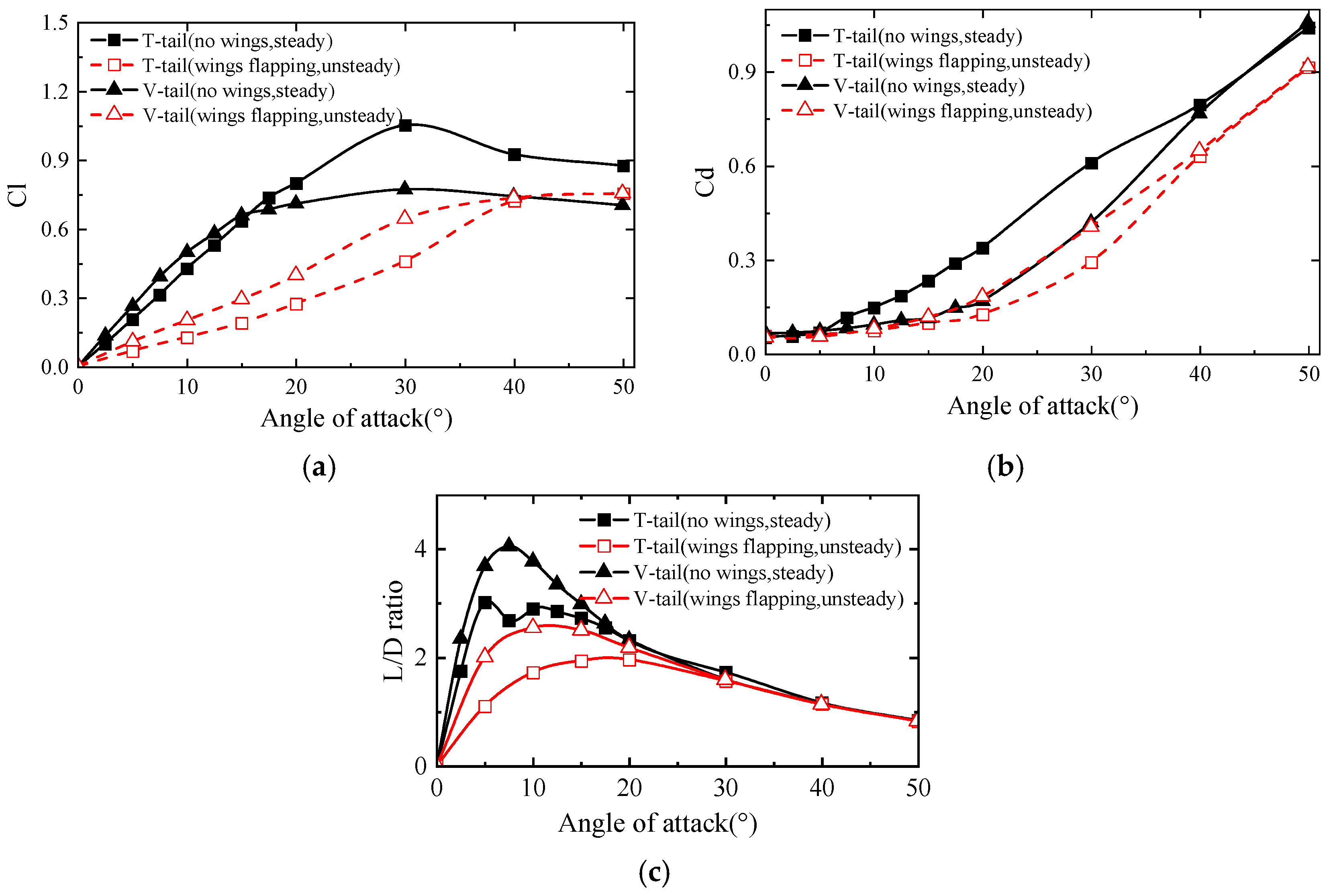
3.1.1. Force Characteristics
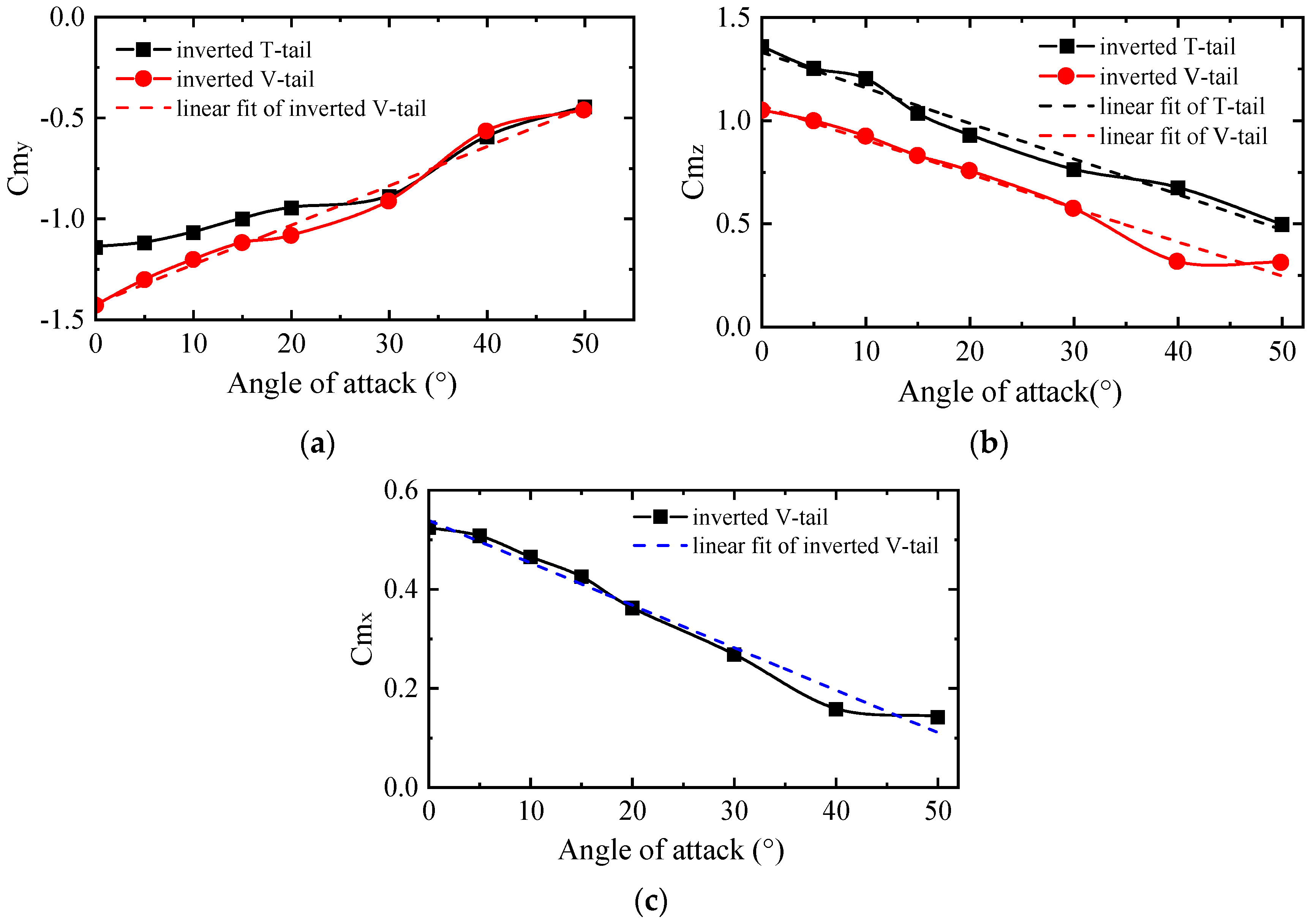
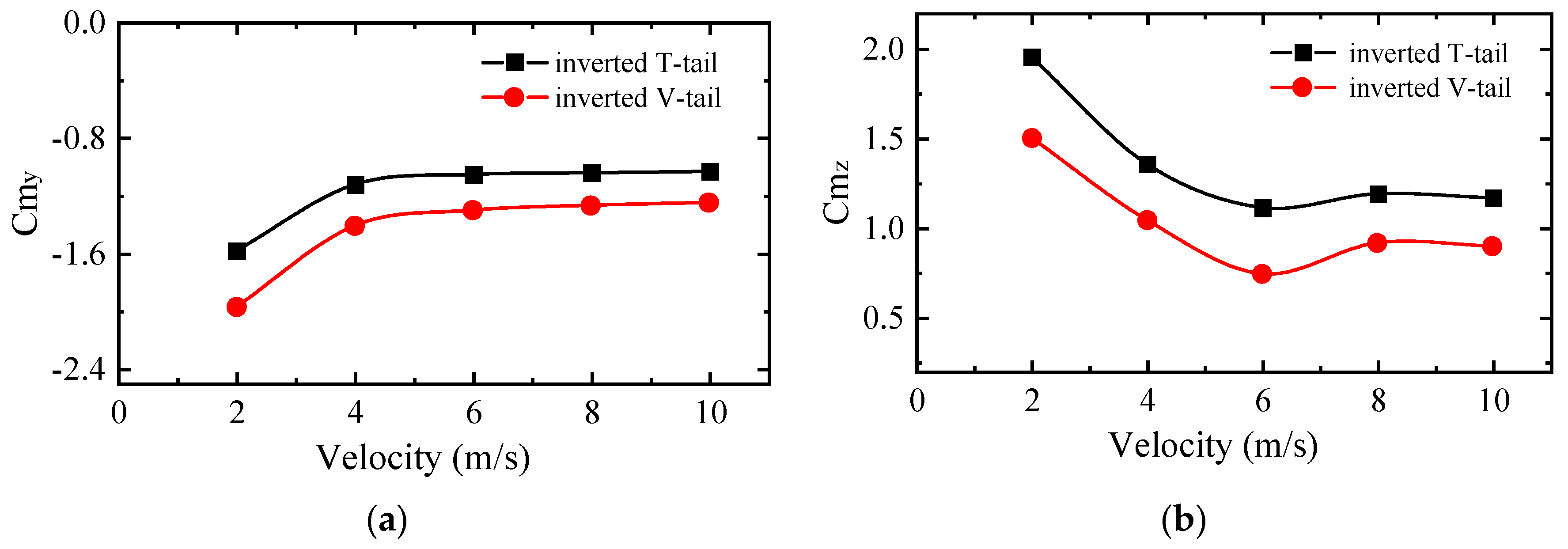
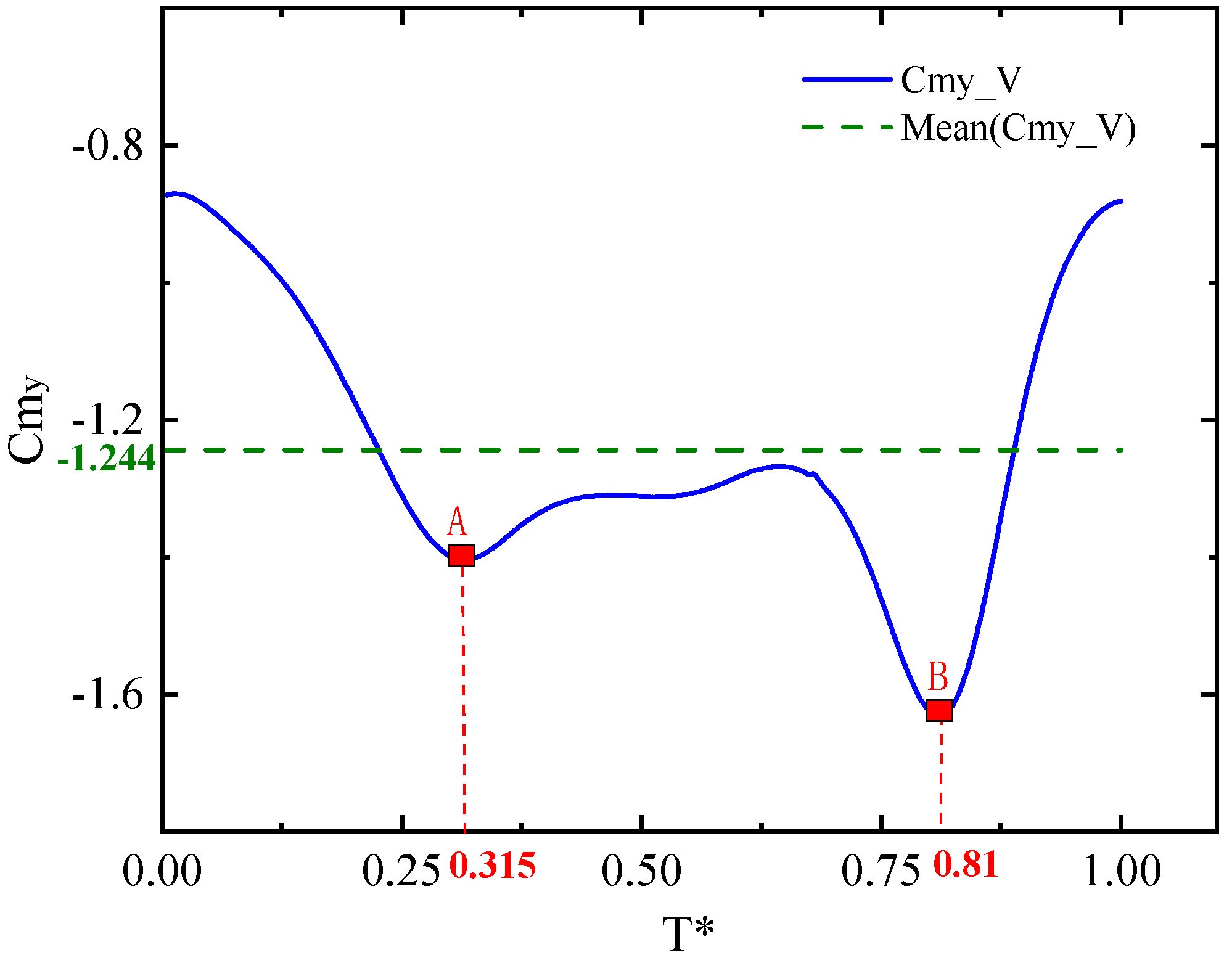
3.1.2. Moment Characteristics
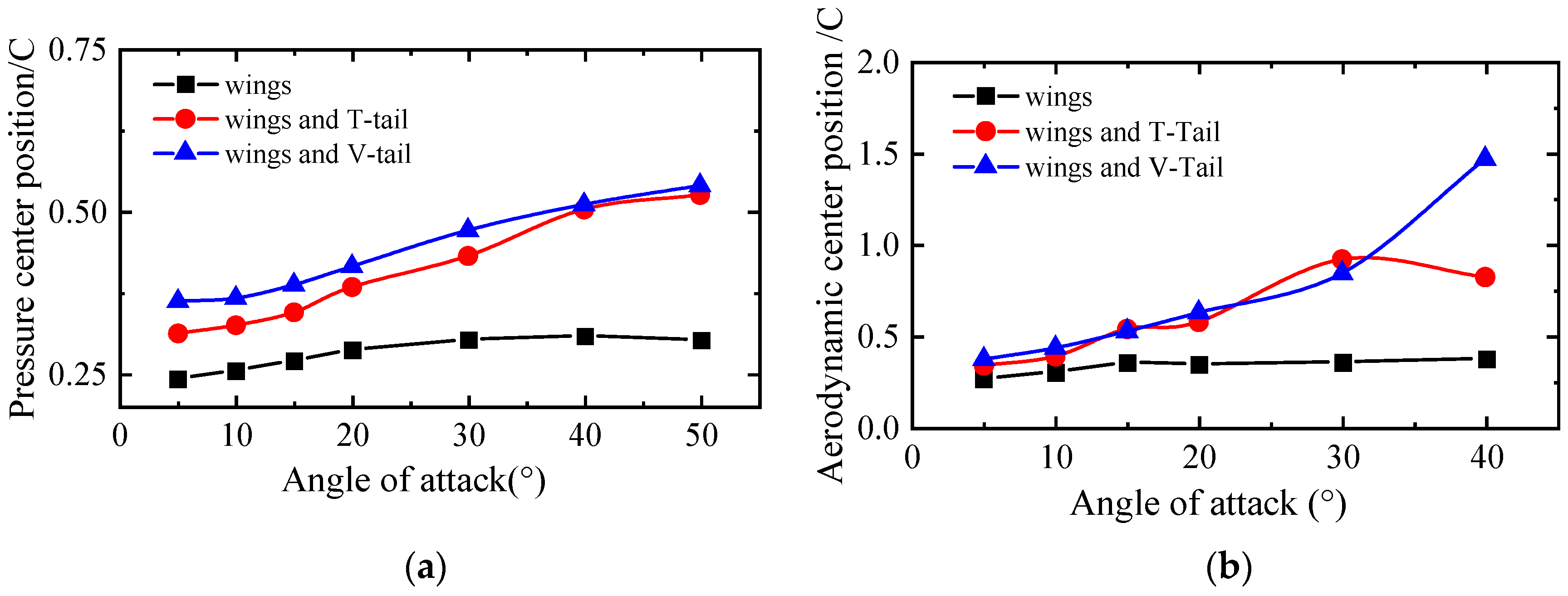
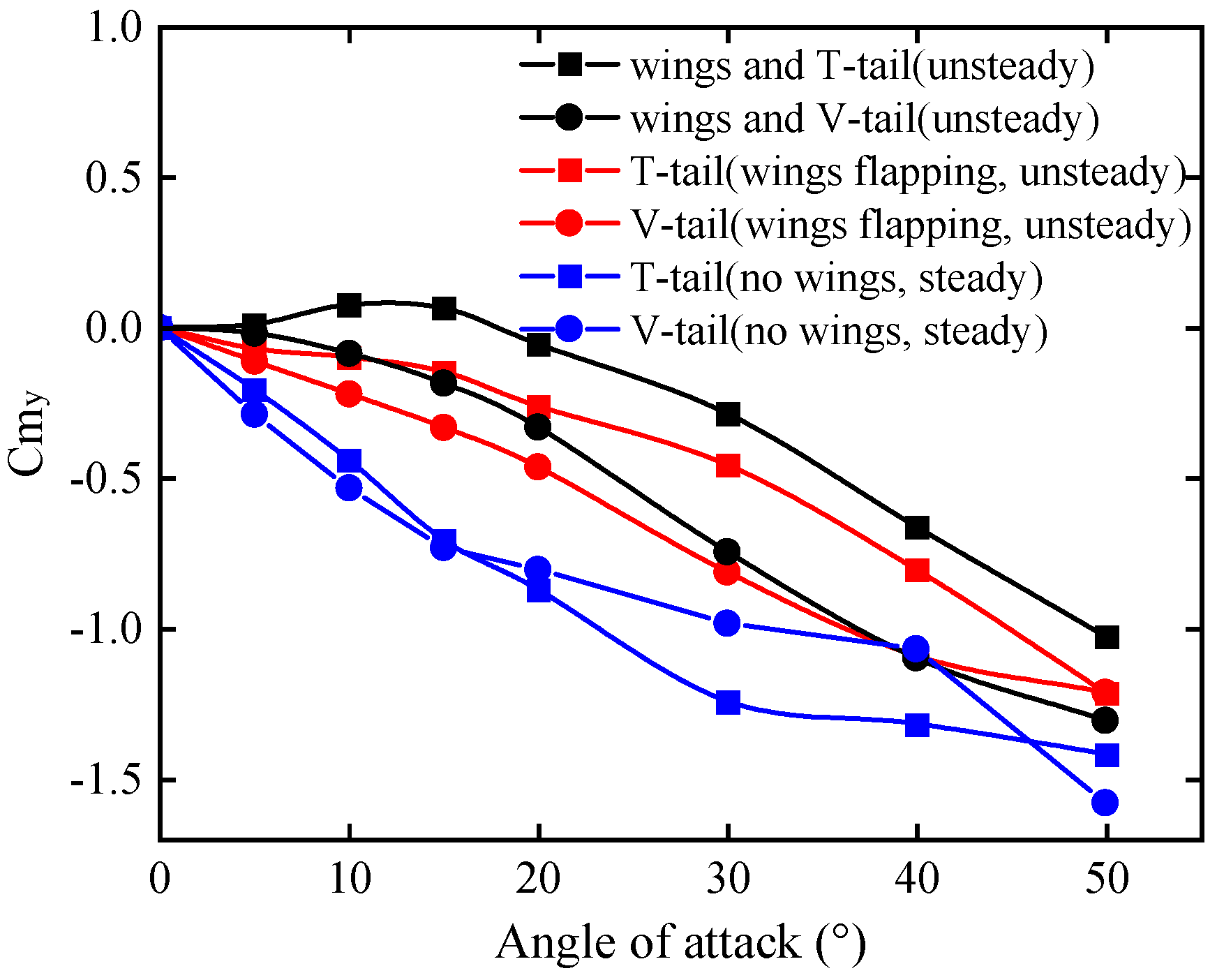
3.1.3. Analysis of Longitudinal Static Stability
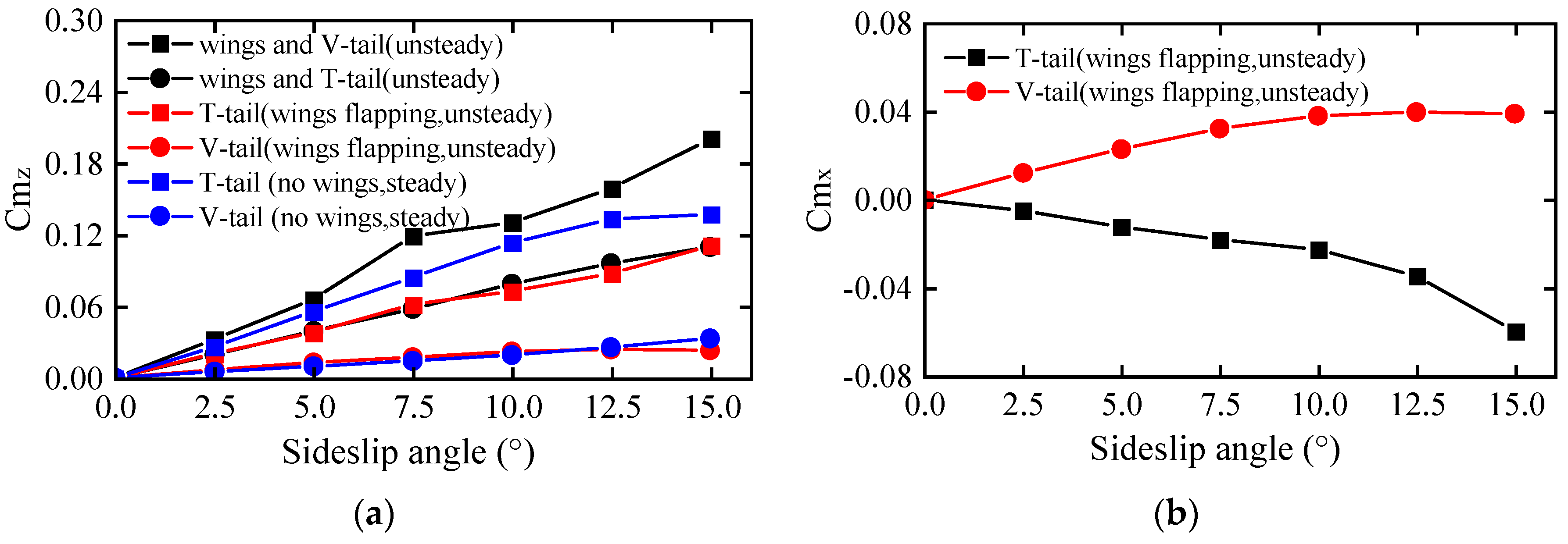
3.1.4. Analysis of Lateral Static Stability
3.2. Influence of the Tail Layouts on the Aerodynamic Characteristics
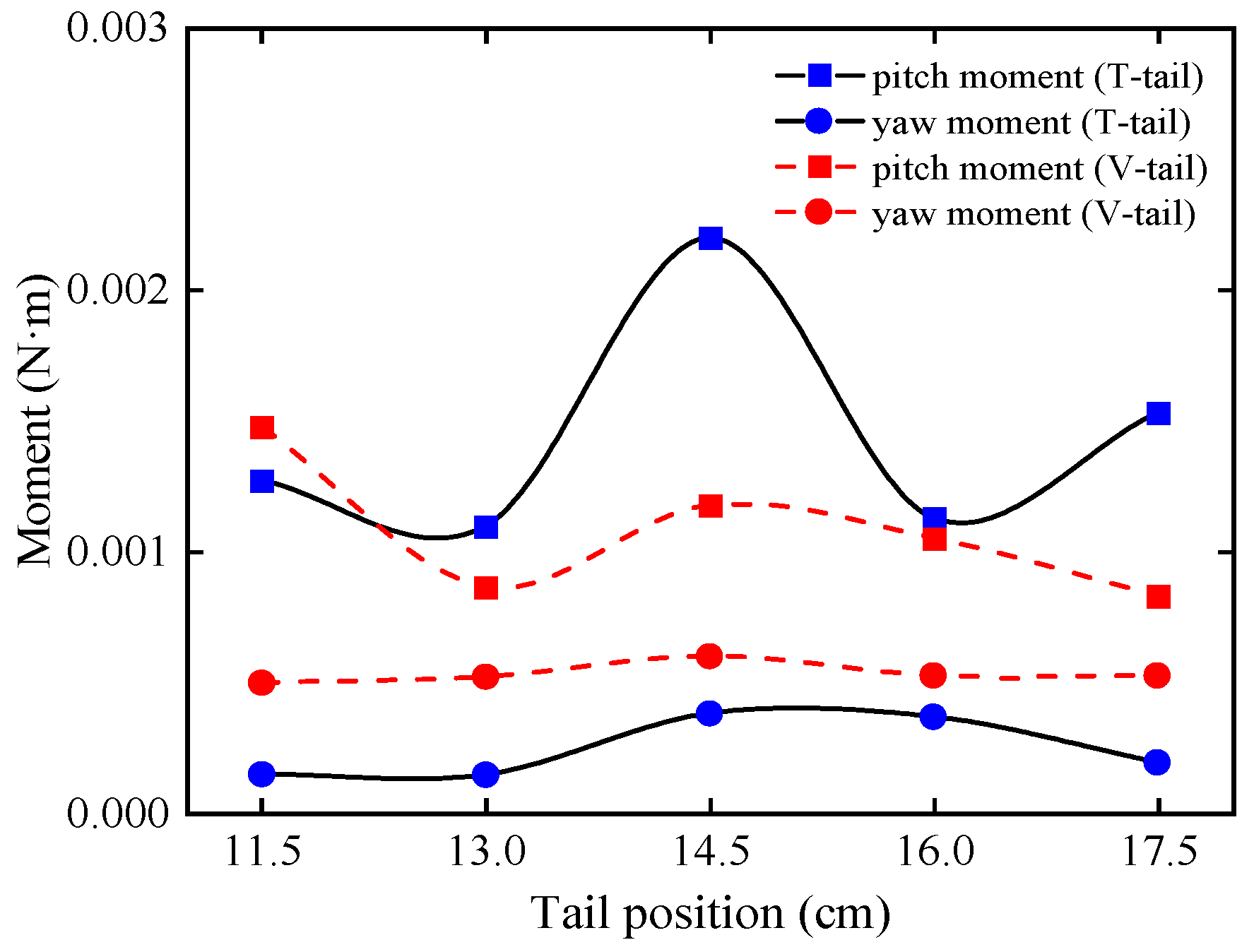
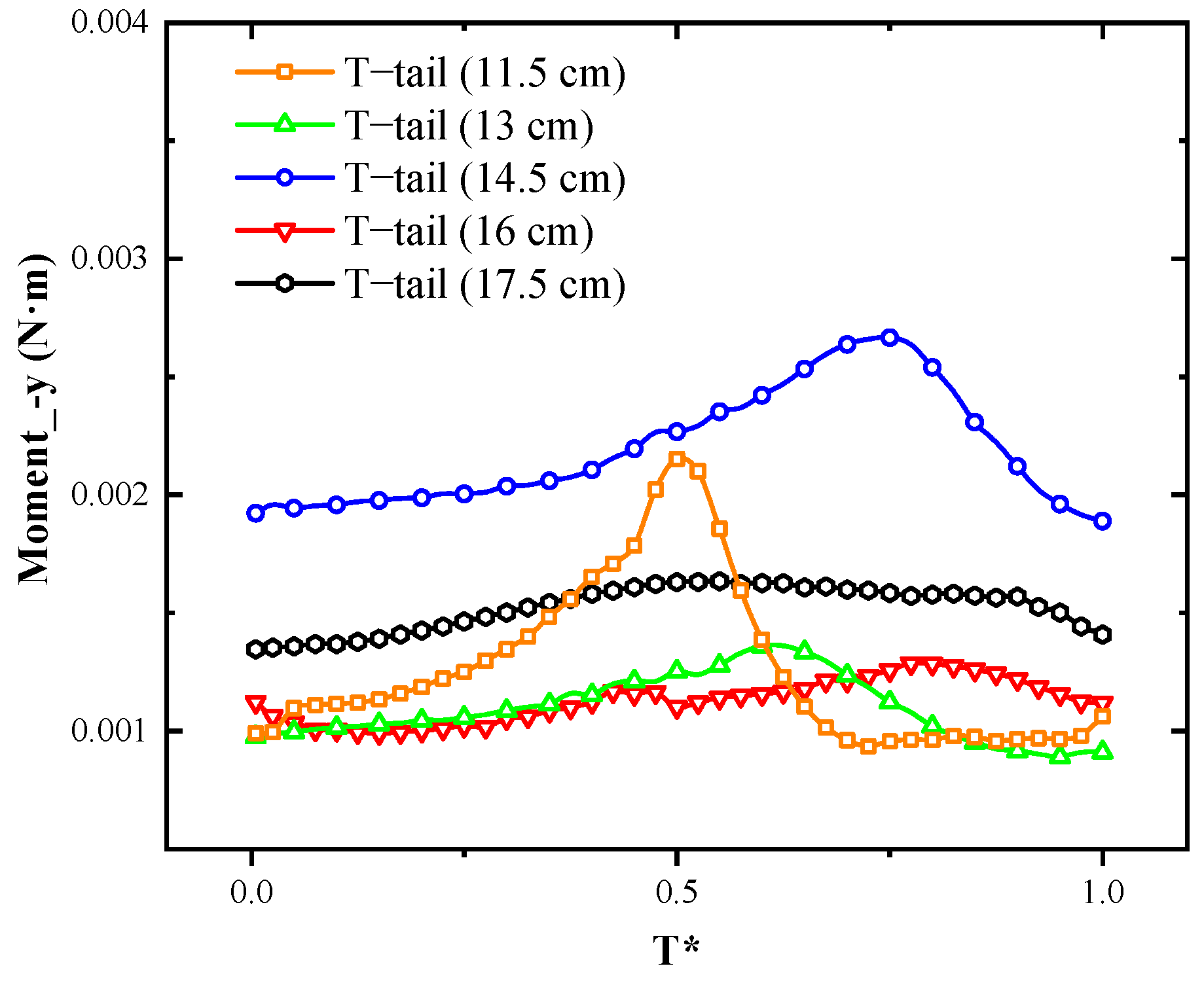
3.2.1. Effect of Tail Position on the Control Moment
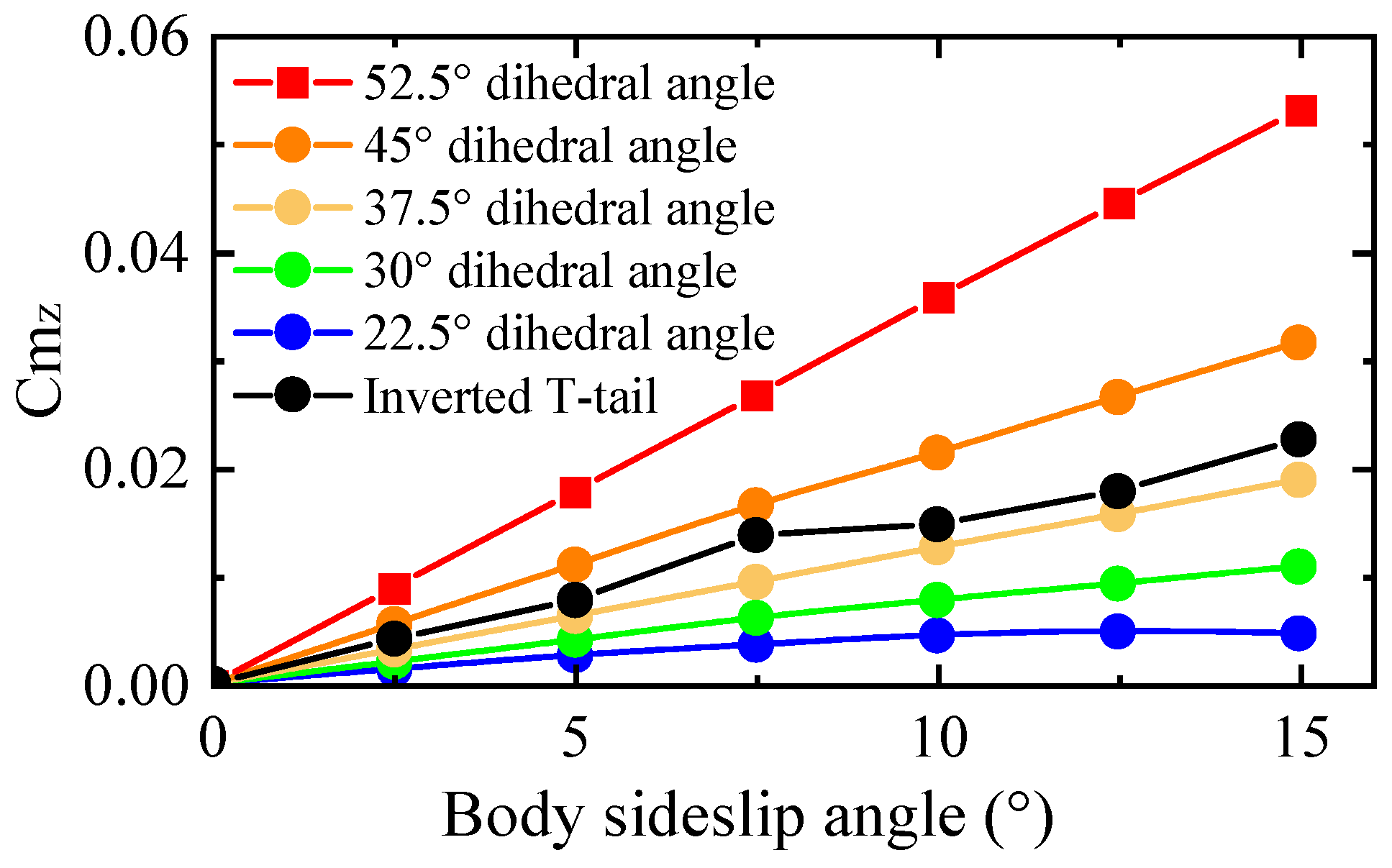
3.2.2. Effect of V-Tail Dihedral Angle on Directional Static Stability
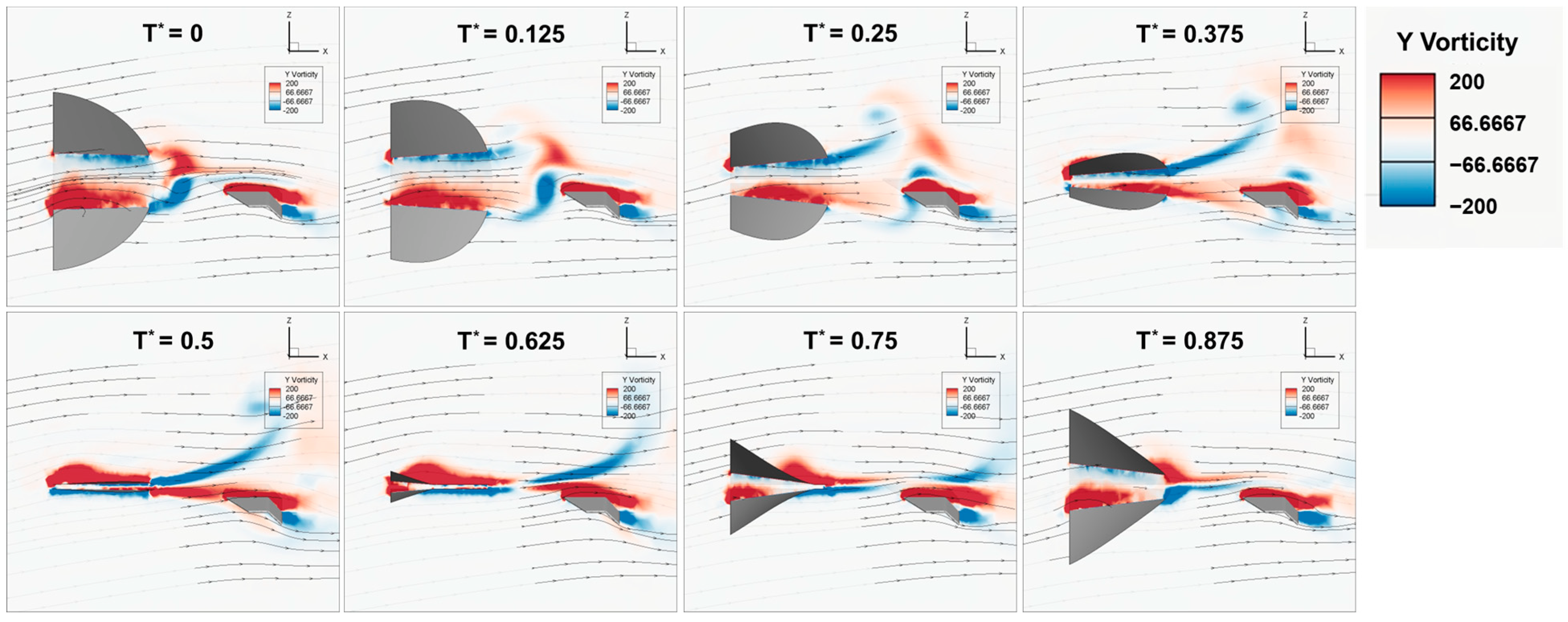
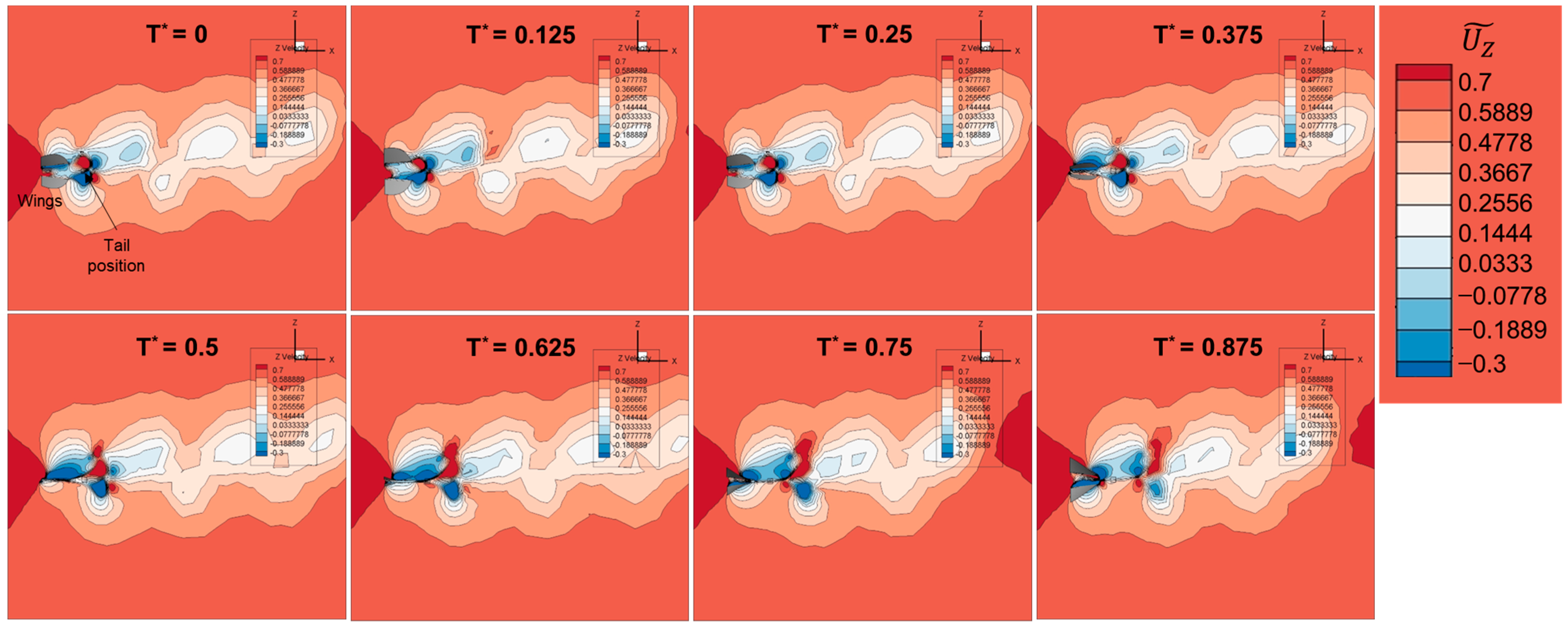
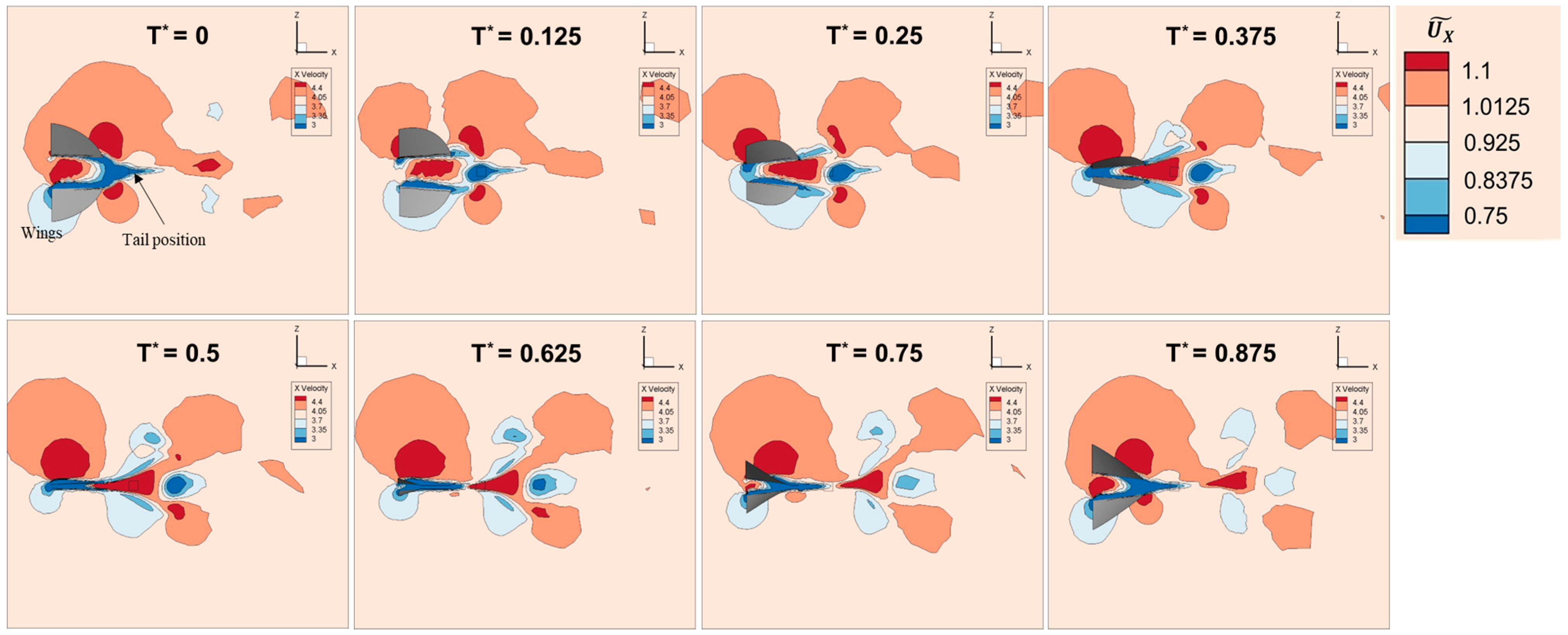
3.3. Analysis of Flow Mechanism
3.3.1. Clap–Peel Mechanism
3.3.2. Wake Deflection Mechanism
4. Conclusions
- (1)
- Tails of different configurations are suitable for different flight states. In a hovering state, the maximum pitch control moment of the inverted T-tail is nearly twice that of the inverted V-tail. In a cruising state, the L/D ratio of the inverted V-tail is 47.4% higher than inverted T–tail, and the pitch control moment is 12.8% higher. The inverted V-tail produces a directional control moment with a positive lateral moment, which is beneficial to maneuvering.
- (2)
- The correct tail layout can improve flight performance. The control moments of the inverted T-tail and inverted V-tail reached the maximum when the vertical and horizontal tail volume coefficient are, respectively, 0.31 and 0.027. The directional static stability of the inverted V-tail with a 2.14-times vertical projection area is similar to that of the inverted T-tail.
- (3)
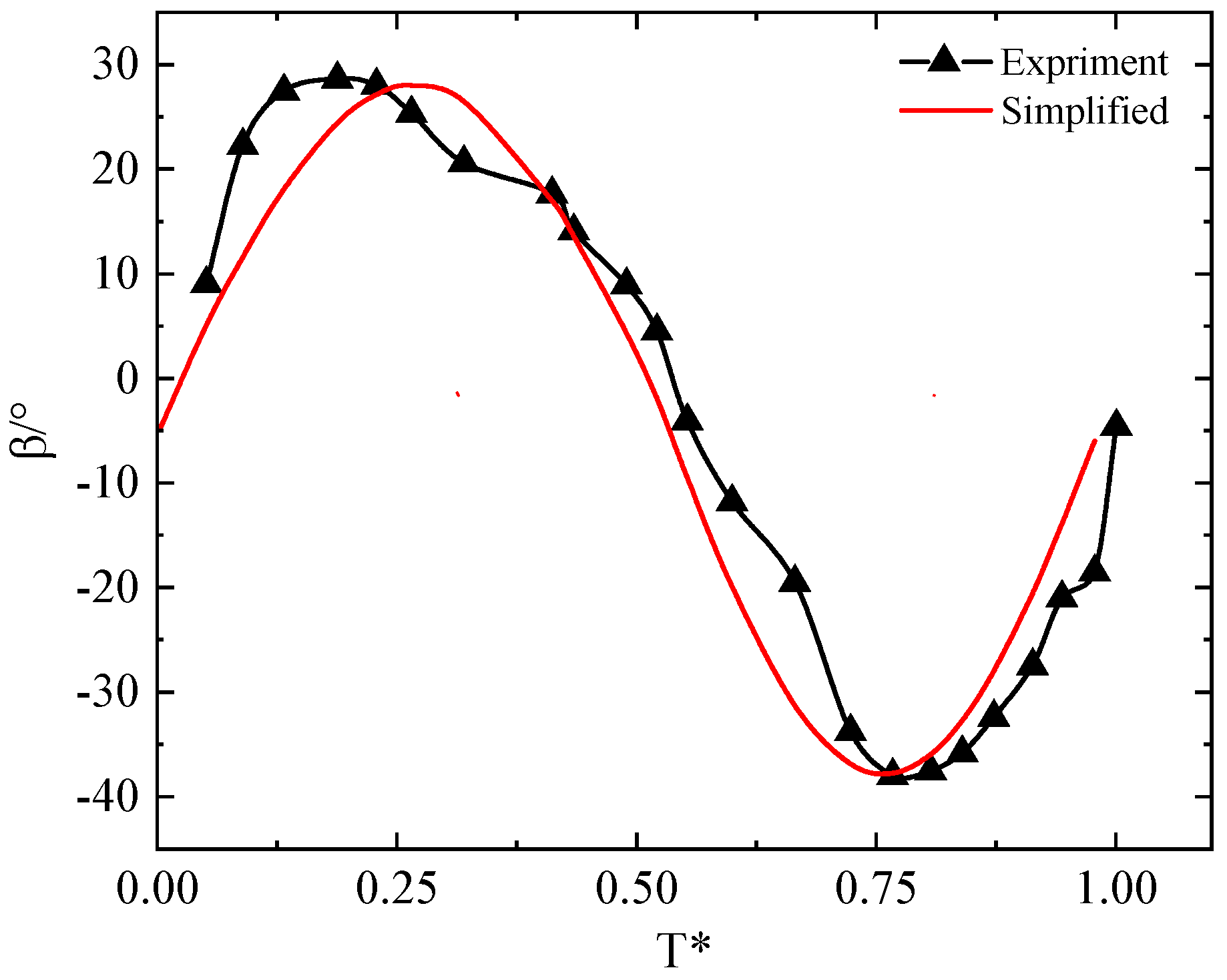
- In this paper, a simplified flexible deformation is proposed for X-shaped flapping wings, and the simulation results are in good agreement with the experimental results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| L/D ratio | Lift to drag ratio |
| FMAV | Flapping wing micro aerial vehicle |
| CFD | Computational fluid dynamic |
| RANS | Reynolds-averaged Navier–Strokes |
| C.G | Center of gravity |
References
- Guo, S.; Li, D.; Wu, J. Theoretical and Experimental Study of a Piezoelectric Flapping Wing Rotor for Micro Aerial Vehicle. Aerosp. Sci. Technol. 2012, 23, 429–438. [Google Scholar] [CrossRef]
- Li, D.; Guo, S.; Di Matteo, N.; Yang, D. Design, Experiment and Aerodynamic Calculation of a Flapping Wing Rotor Micro Aerial Vehicle. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011; pp. 1–10. [Google Scholar] [CrossRef]
- Karasek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.W.; De Croon, G.C.H.E. A Tailless Aerial Robotic Flapper Reveals That Flies Use Torque Coupling in Rapid Banked Turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [PubMed]
- Deng, S.; Wang, J.; Liu, H. Experimental Study of a Bio-Inspired Flapping Wing MAV by Means of Force and PIV Measurements. Aerosp. Sci. Technol. 2019, 94, 105382. [Google Scholar] [CrossRef]
- Jones, K.D.; Bradshaw, C.J.; Papadopoulos, J.; Platzer, M.F. Improved Performance and Control of Flapping-Wing Propelled Micro Air Vehicles. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NE, USA, 5–8 January 2004; pp. 360–370. [Google Scholar] [CrossRef]
- Tay, W.B.; Van Oudheusden, B.W.; Bijl, H. Numerical Simulation of X-Wing Type Biplane Flapping Wings in 3D Using the Immersed Boundary Method. Bioinspiration Biomim. 2014, 9, 17–19. [Google Scholar] [CrossRef] [PubMed]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed]
- Ramezani, A.; Chung, S.J.; Hutchinson, S. A Biomimetic Robotic Platform to Study Flight Specializations of Bats. Sci. Robot. 2017, 2, eaal2505. [Google Scholar] [CrossRef] [PubMed]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar] [CrossRef]
- Doman, D.B.; Oppenheimer, M.W.; Sigthorsson, D.O. Wingbeat Shape Modulation for Flapping-Wing Micro-Air-Vehicle Control during Hover. J. Guid. Control Dyn. 2010, 33, 724–739. [Google Scholar] [CrossRef]
- Jiao, Z.; Wang, L.; Zhao, L.; Jiang, W. Hover Flight Control of X-Shaped Flapping Wing Aircraft Considering Wing–Tail Interactions. Aerosp. Sci. Technol. 2021, 116, 106870. [Google Scholar] [CrossRef]
- Grauer, J.A. Modeling and System Identification of an Ornithopter Flight Dynamics Model; University of Maryland: College Park, MD, USA, 2012. [Google Scholar]
- Tay, W.B.; Bijl, H.; Van Oudheusden, B.W. Biplane and Tail Effects in Flapping Flight. AIAA J. 2013, 51, 2133–2146. [Google Scholar] [CrossRef]
- Yangang, W.; Weixiong, C.; Shuanghou, D.; Xuming, Z. Numerical Study of Flapping Wing/Tail Aerodynamic Interaction for Flapping Wing Micro Air Vehicle. J. Aerosp. Power 2015, 30, 257–264. [Google Scholar]
- Deng, S.; Van Oudheusden, B. Wake Structure Visualization of a Flapping-Wing Micro-Air-Vehicle in Forward Flight. Aerosp. Sci. Technol. 2016, 50, 204–211. [Google Scholar] [CrossRef]
- Yin, Y.; Dong, L.; Zhenhui, Z. Influences of Flapping Wing Micro Aerial Vehicle Unsteady Motion on Horizontal Tail. Acta Aeronaut. Astronaut. Sin. 2012, 33, 1827–1833. [Google Scholar]
- Percin, M.; Eisma, H.E.; Van Oudheusden, B.W.; Remes, B.; Ruijsink, R.; de Wagter, C. Flow Visualization in the Wake of Flapping-Wing MAV “Delfly II” in Forward Flight. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; pp. 132–143. [Google Scholar] [CrossRef]
- Decroon, G.C.H.E.; Perçin, M. The Delfly: Design, Aerodynamics, and Artificial Intelligence of a Flapping Wing Robot; Springer: Berlin/Heidelberg, Germany, 2015; pp. 15–16. [Google Scholar] [CrossRef]
- Xu, M.; Wei, M.; Yang, T.; Lee, Y.S. An Embedded Boundary Approach for the Simulation of a Flexible Flapping Wing at Different Density Ratio. Eur. J. Mech. B/Fluids 2016, 55, 146–156. [Google Scholar] [CrossRef]
- Tao, J.; Xiaosong, Y. Effect of Two-Degree-of-Freedom Wing Motion of Biplane FMAV on Longitudinal Aerodynamics. Comput. Simul. 2020, 37, 37–43. [Google Scholar] [CrossRef]
- Kai, L. Modeling and Application of the Unsteady Aerodynamics for the Bionic Flapping Wing; Beihang University: Beijing, China, 2017. [Google Scholar]
- Nakata, T.; Liu, H. Aerodynamic Performance of a Hovering HawKmoth with Flexible Wings: A Computational Approach. Proc. R. Soc. B Biol. Sci. 2012, 279, 722–731. [Google Scholar] [CrossRef] [PubMed]
- Bie, D.; Li, D.; Xiang, J.; Li, H.; Kan, Z.; Sun, Y. Design, Aerodynamic Analysis and Test Flight of a Bat-Inspired Tailless Flapping Wing Unmanned Aerial Vehicle. Aerosp. Sci. Technol. 2021, 112, 106557. [Google Scholar] [CrossRef]
- Shao, H.; Li, D.; Kan, Z.; Li, H.; Yuan, D.; Xiang, J. Influence of Wing Camber on Aerodynamic Performance of Flapping Wing Rotor. Aerosp. Sci. Technol. 2021, 113, 106732. [Google Scholar] [CrossRef]
- Percin, M.; Oudheusden, B.W.V.; Croon, G.C.H.E.D.; Remes, B. Force Generation and Wing Deformation Characteristics of a Flapping-Wing Micro Air Vehicle “DelFly II” in Hovering Flight. Bioinspiration Biomim. 2016, 11, 036014. [Google Scholar] [CrossRef] [PubMed]
- Zufferey, R.; Tormo-Barbero, J.; Mar Guzman, M.; Maldonado, F.J.; Sanchez-Laulhe, E.; Grau, P.; Perez, M.; Acosta, J.A.; Ollero, A. Design of the High-Payload Flapping Wing Robot E-Flap. IEEE Robot. Autom. Lett. 2021, 6, 3097–3104. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Data |
|---|---|
| Half span/cm | 14 |
| Root chord/cm | 10 |
| Area/cm2 | 426.4 (106.6 × 4) |
| Total stroke amplitude Φ/deg | 72 |
| C.G position/cm | 3.15 |
| Flapping frequency/Hz | 12.5 |
| Parameters | Inverted T-Tail | Inverted V-Tail |
|---|---|---|
| Horizontal projection area | 73.74 cm2 | 73.74 cm2 |
| Vertical projection area | 28.93 cm2 | 28.93 cm2 |
| Total area | 137.26 cm2 | 81.25 cm2 |
| Weight | 1.8 g | 1.6 g |
| Type | Grid Number | Time Step Size (s) | Averaged Thrust (N) | Averaged Lift (N) |
|---|---|---|---|---|
| 1 | 823,035 | 0.0002 | −0.0424 | 0.1967 |
| 2 | 1,527,842 | 0.0002 | −0.0391 | 0.2027 |
| 3 | 3,145,743 | 0.0002 | −0.0386 | 0.2031 |
| 4 | 1,527,842 | 0.0004 | −0.0385 | 0.2034 |
| 5 | 1,527,842 | 0.0001 | −0.039 | 0.2029 |
| Section | Objective | Function | Variables | Control Surfaces‘ Deflection Angle |
|---|---|---|---|---|
| Section 3.1.1 | Aerodynamic forces of wings and tail | Lift Drag L/D ratio | Angle of attack [0°, 5°, 10°, 15°, 20°, 30°, 40°, 50°, 60°] | 0° |
| Section 3.1.2 | Control moment of tails | Cmx Cmy Cmz | Angle of attack [0°, 5°, 10°, 15°, 20°, 30°, 40°, 50°, 60°] Velocity [0 m/s, 2 m/s, 4 m/s, 6 m/s, 8 m/s, 10 m/s] | 45° |
| Section 3.1.3 | Longitudinal static stability of tails | Cmy Pressure center Aerodynamic center | Angle of attack [0°, 5°, 10°, 15°, 20°, 30°, 40°, 50°] | 0° |
| Section 3.1.4 | Lateral static stability of tails | Cmx Cmz | Body side-slip angle [0°, 2.5°, 5°, 10°, 12.5°, 15°] | 0° |
| Section 3.2.1 | Effect of tail position | Pith control momentYaw control moment | Tail position [11.5 cm, 13 cm, 14.5 cm, 16 cm, 17.5 cm] | 45° |
| Section 3.2.2 | Effect of V-tail dihedral angle | Directional static stability | [22.5°, 30°, 37.5°, 45°, 52.5°] | 0° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Li, D.; Shen, T.; Bie, D.; Kan, Z. Numerical Analysis on the Aerodynamic Characteristics of an X-wing Flapping Vehicle with Various Tails. Aerospace 2022, 9, 440. https://doi.org/10.3390/aerospace9080440
Li H, Li D, Shen T, Bie D, Kan Z. Numerical Analysis on the Aerodynamic Characteristics of an X-wing Flapping Vehicle with Various Tails. Aerospace. 2022; 9(8):440. https://doi.org/10.3390/aerospace9080440
Chicago/Turabian StyleLi, Huadong, Daochun Li, Tong Shen, Dawei Bie, and Zi Kan. 2022. "Numerical Analysis on the Aerodynamic Characteristics of an X-wing Flapping Vehicle with Various Tails" Aerospace 9, no. 8: 440. https://doi.org/10.3390/aerospace9080440
APA StyleLi, H., Li, D., Shen, T., Bie, D., & Kan, Z. (2022). Numerical Analysis on the Aerodynamic Characteristics of an X-wing Flapping Vehicle with Various Tails. Aerospace, 9(8), 440. https://doi.org/10.3390/aerospace9080440