1. Introduction
Self-regulated Learning (SRL) refers to the student’s abilities to understand and control their learning environment, assess their strengths and weaknesses, and apply appropriate learning strategies [
1]. Metacognitive and self-regulation skills are important to promote independent learning and refer to “learn to learn” skills, including self-efficacy, self-monitoring, and goal setting. Learners with high SRL skills are able to set appropriate learning goals, monitor their performance, sustain their engagement, and self-regulate their learning strategies. There are strong indications that self-regulation and metacognitive skills in early school years are a predictor of school and academic performance, as well as future life outcomes [
2]. Recent research highlights the need of measuring, monitoring, and supporting self-regulated learning, especially considering the increase in online education and remote learning, where students are free to control their learning environment [
3]. Second-language learners exhibit metacognitive and self-regulated learning skills which allow them to set goals for their learning, as well as to monitor, regulate, and control their cognition, motivation, and behavior [
4].
The motivation of our research pertains to the increasing need to integrate monitoring and support tools aiming to enhance self-regulated learning skills, e.g., goal-setting and self-efficacy. In this paper, we present an educational avatar which acts as a learning companion and helps the student to set appropriate learning goals during the goal-setting process. More specifically, the avatar depicts an estimated representation of the future leaning-self of the student based on the student’s goals and the predicted learning outcomes. The research objective is to design efficient human-algorithm interactions and effectively support students’ metacognitive and self-efficacy skills, towards an explainable and personalized learning companion system.
2. Related Work
In this section, we review works related to the design of intelligent virtual agents and avatars for healthcare and education. More specifically, we focus on applications of self-avatars; avatars designed as a virtual representation of the user within a digital environment. Future-self avatars have been used to represent possible future representations of the user according to their behavior and/or actions in the physical or virtual world. In the context of behavior change support systems, the Future-Self Continuity model has been investigated to design avatars which visualize the future possible selves of the user based on their future actions in order to support smoking cessation [
5]. Future self avatar-based interventions have been also applied to promote healthy nutrition habits, e.g., low sodium intake [
6].
While such applications focus on long-term behavior change, the Motivational Self System has been applied in educational settings to investigate how language learners can get insights of their possible future learning-selves in terms of learning outcomes aiming to positively affect student’s motivation and facilitate self-regulated learning [
7,
8]. In our work, we propose the use of a future-self avatar to represent the short-term consequences (completion of weekly homework) of the user’s actions (daily study plan) to support their planning skills. An underlying prediction model can be trained on student data to estimate the learning outcomes of a given study plan in order to evaluate the feasibility of the plan for a specific student. Machine learning models have been successfully used to model student’s behavior (progress, test scores, academic performance, etc.), based on study-related information [
9,
10], e.g., hours of studying, type of activities, etc. We propose utilizing a self-avatar to visualize and communicate the predictions of an AI model to the student.
In the domain of educational technologies, Artificial Intelligence (AI) has been successfully applied to solve computational problems for intelligent tutoring systems and robot-based learning [
11,
12]. Most AI methods in such systems act in a fully autonomous and non-transparent way resulting to low learner control or agency over their learning process [
13]. Since online and game-based learning environments are mostly self-paced learning environments and require students to control their learning (learner agency), self-regulation becomes a critical factor for a successful learning process. Even “good” learners may experience trouble regulating their learning behaviors in unfamiliar learning environments or challenging circumstances [
14]. Research studies have shown that SRL scaffolding can enhance learning and affective outcomes during language learning, considering the individual differences in learner’s skills and needs [
15]. Explainable AI methods have been used to enhance metacognitive skills in robot-based learning activities, including Open Learner Models and explainable recommendations in order to support a student’s SRL skills [
16]. Our research aims to investigate how AI methods can be utilized in order to design intelligent human-algorithm interactions through
explainable and collaborative AI [
17], in the context of intelligent tutoring and learning companion systems.
3. Interaction Scenario and System Architecture
The target population for our proposed system are primary school students. More specifically, the proposed system architecture is defined based on an interaction scenario for Dutch primary school students in Groups 7 and 8 (10–12 years old). Weekly tasks and planning interventions are used by teachers to stimulate students to enhance their planning skills. The teacher assigns (personalized) weekly tasks to the students for different subjects (English, Dutch, Math, Geography). Students are asked to log their planning schedule in an agenda and discuss it with the teacher. At the end of the week, the teacher can provides feedback, if needed.
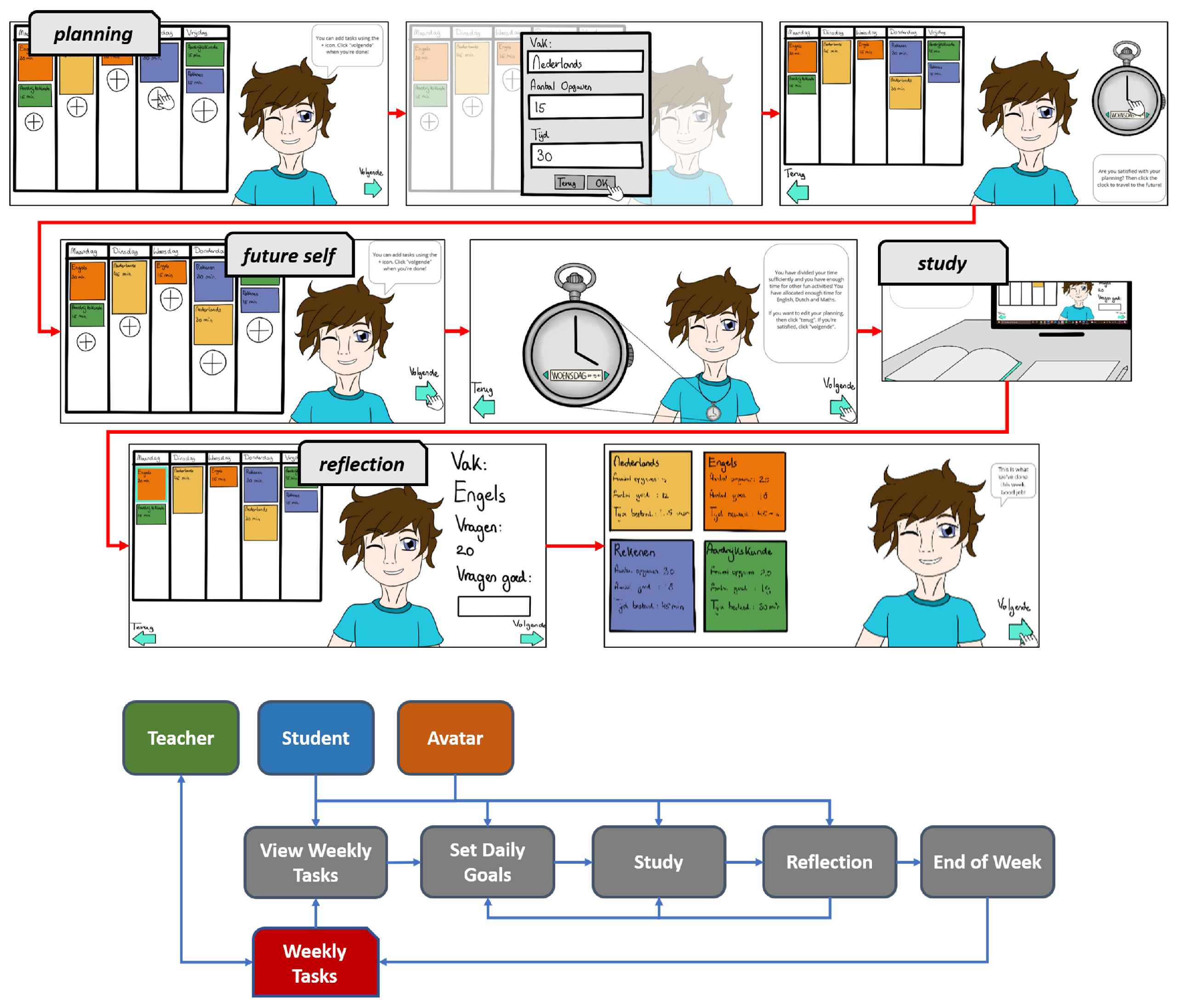
The interaction scenario includes the following stages: (a)
daily planning based on weekly goals, (b) negotiation-based interaction with the
future learning-self avatar, (c)
study/homework, and (d)
reflection (
Figure 1). During the planning session, the student interacts with the system in order to set the daily tasks based on the given weekly task provided by their teacher, The student uses a graphical interface (e.g., scheduling interface with drag-and drop items) in order to easily add and edit their study plan in the form of time blocks for each subject and day. This information (student’s input) is used as an input for an underlying prediction model which estimates the learning outcomes for a given plan. The system visualizes these predictions through a future learning-self avatar to help the student get insights of their own planning. The student can negotiate the learning goals and reflect on the actual outcomes of their plans and learning process.
Our proposed approach utilizes a recurrent neural network as the underlying prediction model of a student’s weekly progress considering the daily goals and learning outcomes. Recurrent neural networks (RNNs) are a variant of neural networks used to model sequential data and have been applied for student progress modeling. More specifically, RNNs have been used to predict final grades of university students from the log data stored in the educational systems [
18]. Log data include information about learning activities that the student is asked to complete weekly, e.g., attendance, reports, quizzes, etc. This data is used as a sequential input at the network. The final output is the prediction of the network given all sequential input. Considering this approach, we will train a network that predicts the weekly learning outcome (e.g., weekly task completion) based on the daily time spent on each learning material. Our modeling approach follows the assumption that the amount of the allocated time for each subject can efficiently predict the weekly progress, e.g., percentage of completed exercises. Moreover, the sequential nature of the planning data (e.g., distribution of time allocated over the week) can be efficiently modeled with a sequential prediction model. We will evaluate the validity of these assumptions by comparing different models and feature selection approaches on student data. More features will be investigated, including difficulty level and type of exercises, aiming to identify an efficient model both in terms of learning (convergence speed, data efficiency) and performance (model accuracy).
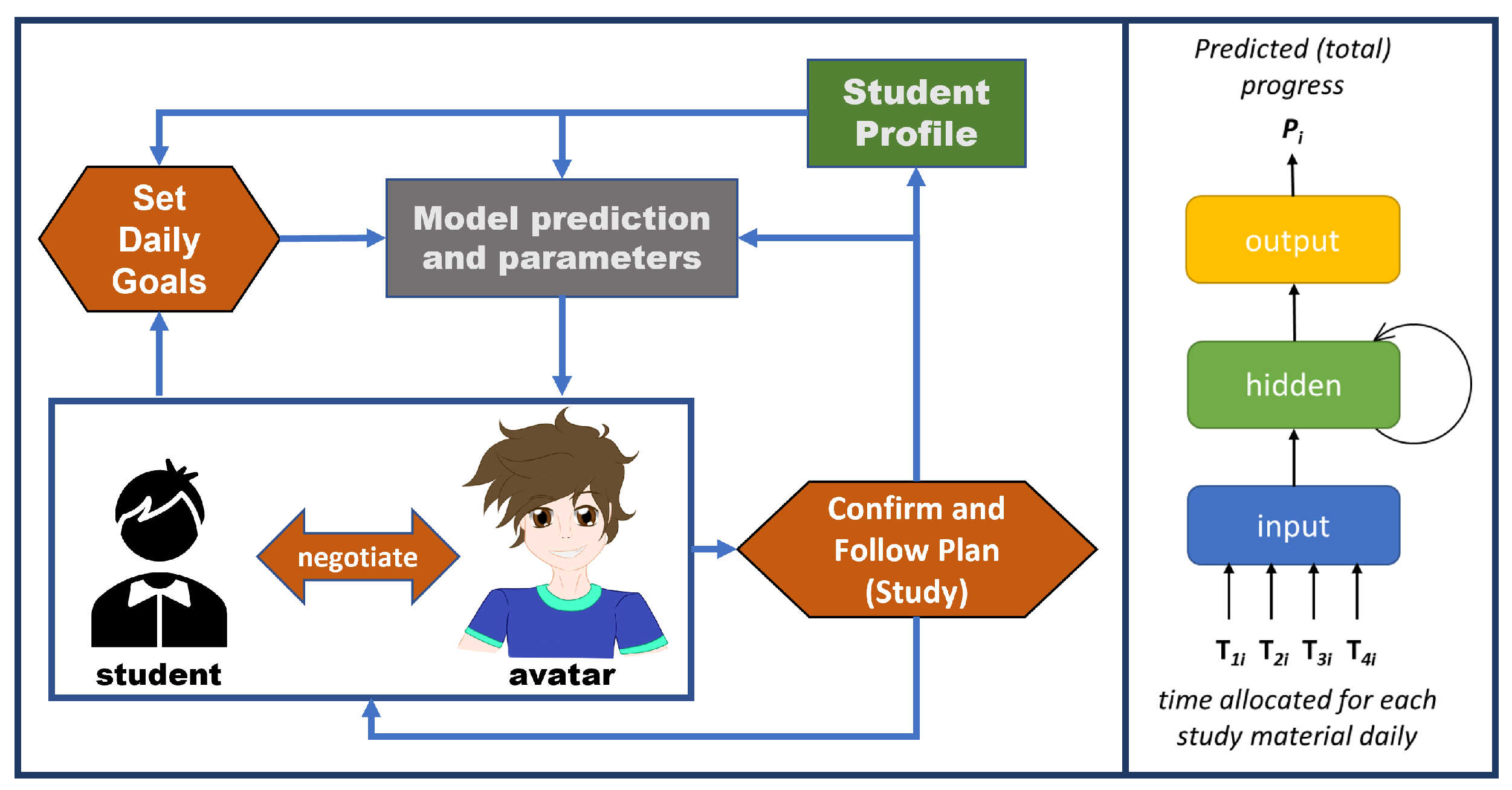
The student interacts with the avatar during the goal-setting process of self-regulated learning (
Figure 2). The goal of the interaction is to help the student set appropriate short-term (daily) goals, based on a long-term (weekly) goal. The avatar follows a negotiation-based approach [
19] to provide the student with insights of their possible future learning-selves based on the time allocated daily for each study material. The goal of the negotiation-based interaction is to enhance student’s motivation and control over the goal-setting process rather than automatically select the “correct” study plan and goals for the student. More specifically, the prediction model is used to estimate the learning outcomes both of the student’s input, as well as of variations of the student’s plan, as alternative input/output pairs. These input/output pairs and model parameters (input uncertainty, confidence level) will be used to design the negotiation-based interaction with the user. Each alternative planning is presented by a corresponding avatar, which visualizes the estimated learning outcome of a given plan, e.g., in the form of if-then rule, and the feasibility of the goal, in the form of design features (facial expressions, background color, etc.).
One of the main challenges of our proposed approach is that the avatar design should encapsulate the uncertainty of the student’s input, e.g., when the student sets overly optimistic (or pessimistic) goals, as well as the model’s prediction uncertainty. In order to tackle this, multiple future selves will be visualized, capturing the level of uncertainty of the student’s input (e.g., how likely it is to actually reach the daily goals) and the prediction model’s accuracy and confidence. Since the RNN predicts different learning outcomes for different sequences of goals, the negotiation aims to help the student understand that both their choices (goals) and actual actions (study) have consequences on their learning outcomes. Moreover, the design should elicit empathy, be easily understandable, and encourage the student to reflect on their goal setting and experiment with different strategies. Our long-term objective is to investigate the effects of our system to students’ affective and learning outcomes, as well as their long-term engagement with the system.
4. Ongoing Work: Design Process and Challenges of the Future Learning-Self
In this section, we present our ongoing work and design process based on the proposed architecture. The main challenge of the design process is to design efficient human-algorithm interactions, i.e., design an avatar which utilizes an underlying AI model to interact and communicate with the student in order to support their skills. Our approach includes the design of a transparent AI-based avatar which communicates the model parameters (e.g., input/output pairs, predictions, model uncertainty) to the student in order to enhance their skills during the learning process.
Considering the avatar design, motivational design theories have been applied for game-based learning for children, highlighting the importance of intrinsic motivation and sustained engagement, considering basic human user needs, such as
Competence,
Autonomy, and
Relatedness [
20]. Additional design features have been proposed for game-based learning and health applications, including
Interactivity,
Agency, and
Identity [
21]. Based on the above, the avatar is designed as a representation of the future learning-self of the student, as well as a learning companion which guides the student through the system interactions. This design decision has been made to create relatedness for the student, a core construct for stimulating (intrinsic) motivation [
22]. With the help of game features—“time travel”—the avatar (future self) is able to provide insights of how the proposed planning will affect the student in the future (e.g., learning and affective outcomes). This can motivate the student by supporting their self-efficacy to complete the planned tasks. An important aspect is learner’s agency and autonomy, as a basic construct of intrinsic motivation. The avatar provides insights and negotiates the student’s goals but the student can make their own decisions and reject or accept the avatar’s advice.
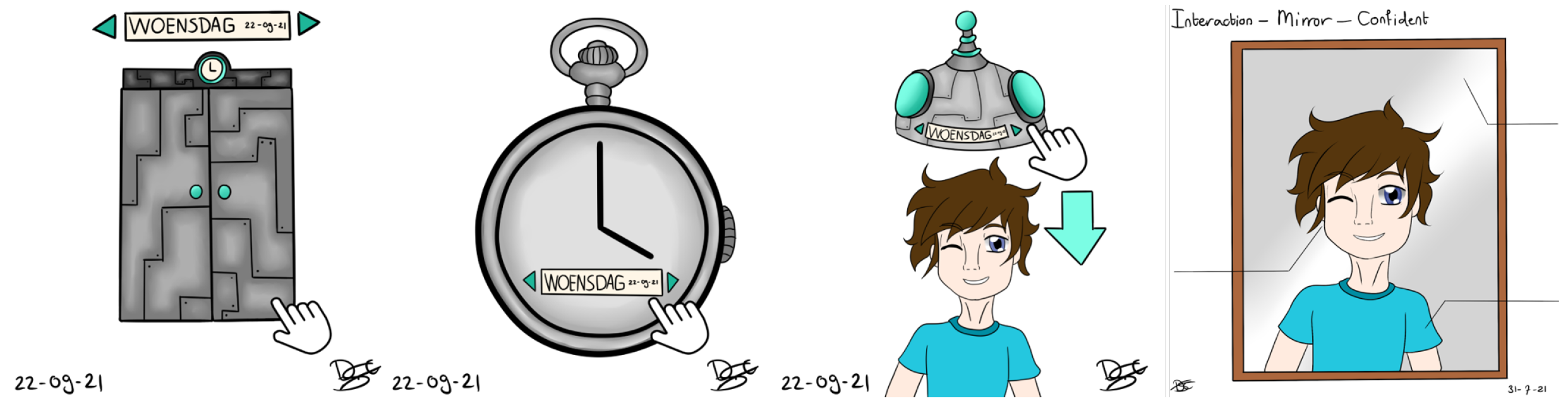
In order to interact with their future learning-self, the student needs to use the time travel feature. We present four design alternatives: the Time Machine, the Clock, the Time Helmet and the Future Mirror (
Figure 3). These features are used to “travel” to the future, making a visible distinction between the present day planning and its effects on the future. The child can actively choose to view the predicted future using this tool. The future self avatar will visualize and communicate the model predictions and parameters in order to provide insights both on the predicted learning and affective outcomes. More specifically, the underlying model is used to predict the student’s progress (e.g., weekly test score), as well as the student’s emotional states during learning (e.g., stressed or engaged).
Given that student engagement and emotions play a central role in learning [
23], the goal of the avatar design is to visualize appropriate student emotions through facial expressions as a representation of the future learning-self. According to the Flow Theory [
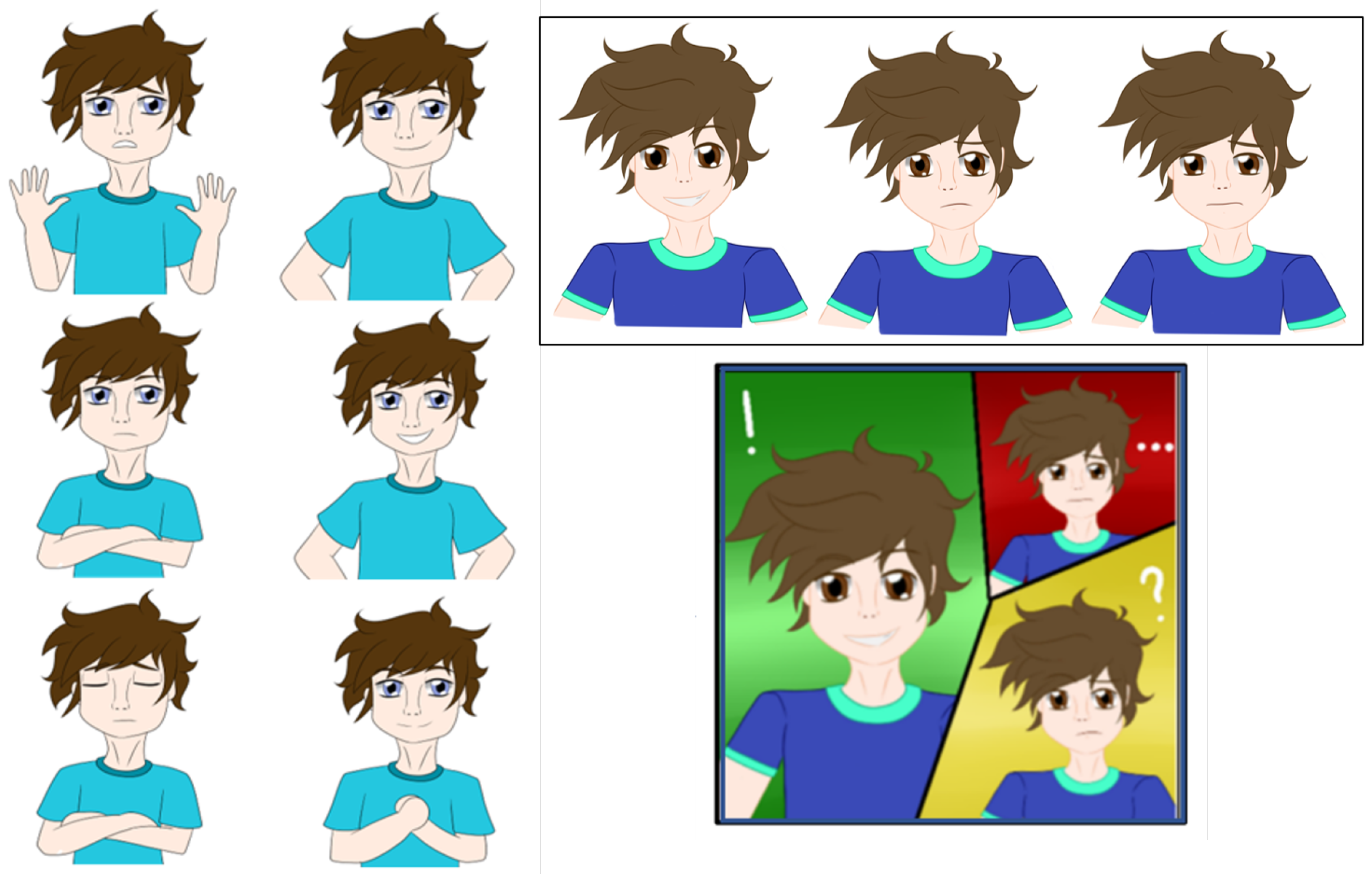
24], the emotional state of an individual during a task or activity depends on the relationship between the individual’s skills and the task difficulty. It is desirable to meet the conditions of the flow channel to optimize motivation for using the system. Flow requires specific goals, a balance between the task challenge and the user’s skill level. The flow state can be considered as a mental state where the student is engaged and in control of the activity. When the challenge is low compared to the user’s skill level, the child will most likely experience boredom or apathy. On the contrary, experiencing a difficult challenge which does not match the skill levels, will probably lead to an overwhelming and stressful feeling. Considering the flow state, an emotion of joy and satisfaction could represent this emotional state, demonstrating a desired balance between the difficulty and challenge of assignments with respect to individual skill level. While the mental states of the Flow theory are limited to three basic categories (Boredom, Flow, Anxiety), there are more detailed versions with more mental states, i.e., Worry, Apathy, Control. Our current design approach includes different visualizations of positive and negative emotions in order to identify the most appropriate representations for the mental states based on the flow theory (
Figure 4). The design of the emotional expressions was inspired by the PrEmo Emotion Cards [
25]. Our plan is to investigate different design alternatives, including background colors and punctuation marks. As an example, background colors can be used to visualize the estimated emotional state based on the predicted feasibility of the student’s current plan: positive (green), neutral/in between (yellow), and negative (red) [
26].
Considering the human-algorithm interaction, the goal is to utilize the model predictions and parameters and design a negotiation-based interaction between the avatar and the student. More specifically, the avatar visualizes the model prediction through facial expressions, and the negotiations are designed based on the model predictions for alternative model input. These predictions can be visualized through different future self avatars to provide insights for alternative study plans. More specifically, the student’s input on the interface (planning) triggers the model to make a set of predictions for possible learning outcomes for a set of alternative inputs based on the student’s planning. The model estimates the learning outcomes (model outputs) based on the different plans (model inputs). The goal of the system is to utilize the model parameters (input/output pairs, prediction accuracy, input uncertainty) through the avatar design. For example, given a student’s input, the system can visualize three different avatars which visualize the alternative study plans and their estimated outcomes in terms of the feasibility of the plan and the satisfaction of the weekly goal. A feasible but not effective plan would be visualized as an avatar with an expression of apathy or boredom, indicating that the student may need to adjust their study plan on given subjects. A non-feasible plan (e.g., over-ambitious) could be represented by a stressed avatar indicating that the student may get stressed following this plan.



{kind=link}
{kind=link}
{kind=link}
{kind=link}



