
Exponentially-Fitted Fourth-Derivative Single-Step Obrechkoff Method for Oscillatory/Periodic Problems




Abstract
:1. Introduction
2. Construction of Method
- S1: , the classical case with the set
- S2: , the mixed case with the set
- S3: , the mixed case with the set
- S4: , the mixed case with the set
- S5: , the mixed case with the set
- S1 :: (K,P) = (8,−1)
- S2 :: (K,P) = (6,0)
- S3 :: (K,P) = (4,1)
- S4 :: (K,P) = (2,2)
- S5 :: (K,P) = (0,3)
3. Error Analysis :: Local Truncation Error (lte)
- S1 ::
- S2 ::
- S3 ::
- S4 ::
- S5 ::
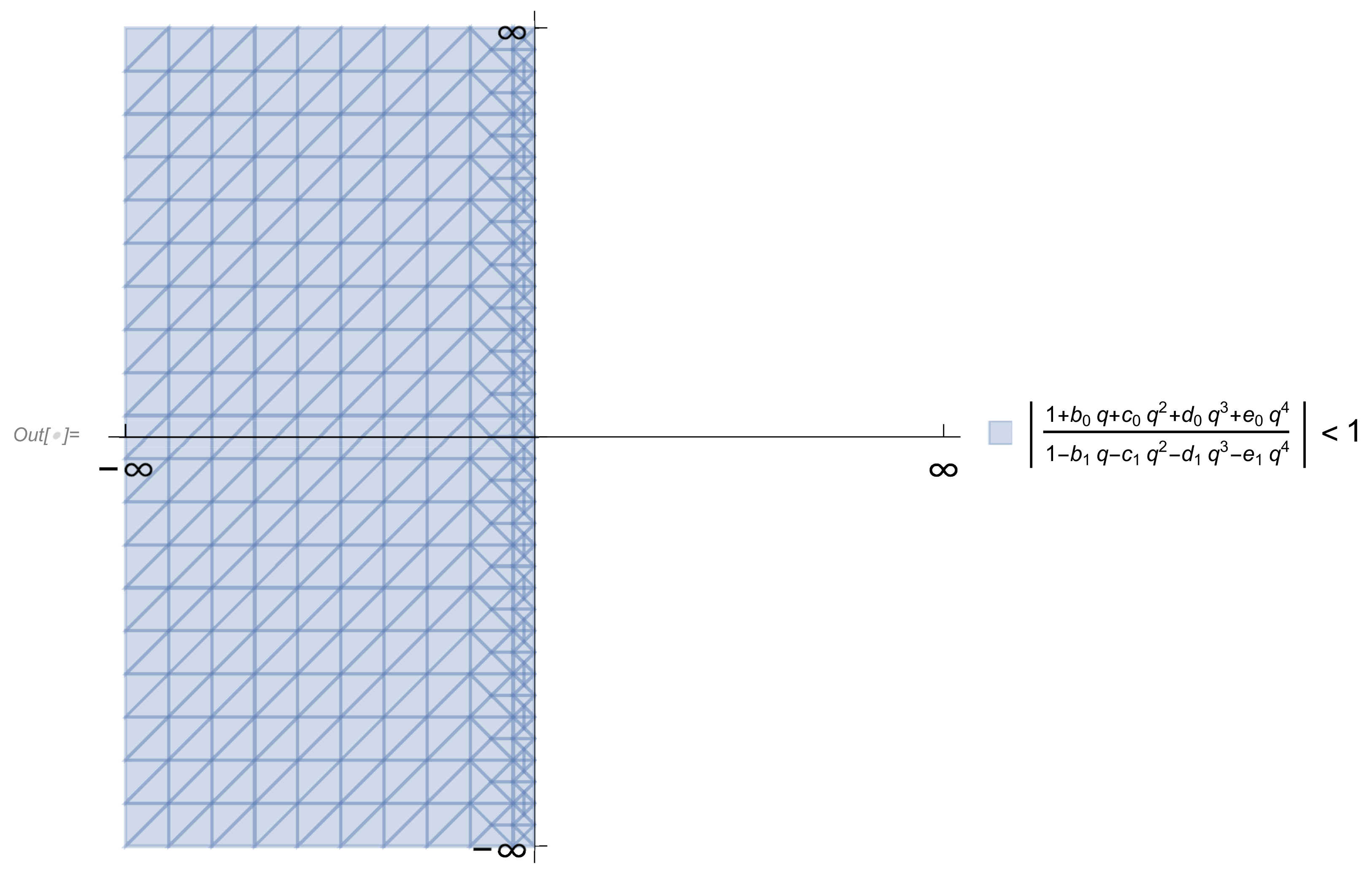
4. Convergence and Stability Analysis
5. Numerical Results
5.1. Problem 1
5.2. Problem 2
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lambert, J.D. Computational Methods in ODEs; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Lambert, J. Numerical Methods for Ordinary Differential Systems; Wiley: New York, NY, USA, 1991. [Google Scholar]
- Ixaru, L.; Vanden Berghe, G. Exponential Fitting: Mathematics and Its Applications; Kluwer Academic Publishers: Alphen aan den Rijn, The Netherlands, 2004. [Google Scholar]
- Butcher, J. Numerical Methods for Ordinary Differential Equations; Wiley: New York, NY, USA, 2008. [Google Scholar]
- Akanbi, M.A. On 3-stage Geometric Explicit Runge-Kutta Method for Singular Autonomous Initial Value Problems in Ordinary Differential Equations. Computing 2011, 92, 243–263. [Google Scholar] [CrossRef]
- Wusu, A.S.; Okunuga, S.A.; Sofoluwe, A.B. A Third-Order Harmonic Explicit Runge-Kutta Method for Autonomous Initial Value Problems. Glob. J. Pure Appl. Math. 2012, 8, 441–451. [Google Scholar]
- Wusu, A.S.; Akanbi, M.A. A Three-Stage Multiderivative Explicit Runge-Kutta Method. Am. J. Comput. Math. 2013, 3, 121–126. [Google Scholar] [CrossRef] [Green Version]
- Wusu, A.S.; Akanbi, M.A.; Fatimah, B.O. On the Derivation and Implementation of a Four Stage Harmonic Explicit Runge-Kutta Method. Appl. Math. 2015, 6, 694–699. [Google Scholar] [CrossRef] [Green Version]
- Abolarin, O.E.; Adeyefa, E.; Kuboye, J.O.; Ogunware, B.G. A Novel Multiderivative Hybrid Method for the Numerical Treatment of Higher Order Ordinary Differential Equations. Al Dar Res. J. Sustain. 2020, 4, 43–56. [Google Scholar]
- Simos, T.E. An exponentially-fitted Runge-Kutta method for the numerical integration of initial-value problems with periodic or oscillating solutions. Comput. Phys. Commun. 1998, 115, 1–8. [Google Scholar] [CrossRef]
- Vanden Berghe, G.; Daele, M. Exponentially-fitted Stomer/Verlet methods. J. Numer. Anal. Ind. Appl. Math. 2006, 1, 241–255. [Google Scholar]
- Wu, X.; Wang, B.; Mei, L. Oscillation-preserving algorithms for efficiently solving highly oscillatory second-order ODEs. Numer. Algorithms 2021, 86, 693–727. [Google Scholar] [CrossRef]
- Iserles, A. On the Numerical Analysis of Rapid Oscillation. In CRM Proceedings and Lecture Notes; Centre for Mathematical Sciences: Cambridge, UK, 2004; pp. 1–15. [Google Scholar]
- Liniger, W.S.; Willoughby, R.A. Efficient Integration methods for Stiff System of ODEs. SIAM J. Numer. Anal. 1970, 7, 47–65. [Google Scholar] [CrossRef]
- Jackson, L.W.; Kenue, S.K. A Fourth Order Exponentially Fitted Method. SIAM J. Numer. Anal. 1974, 11, 965–978. [Google Scholar] [CrossRef]
- Cash, J.R. On exponentially fitting of composite multiderivative Linear Methods. SIAM J. Numer. Anal. 1981, 18, 808–821. [Google Scholar] [CrossRef]
- Coleman, J.P.; Duxbury, S.C. Mixed collocation methods for y″ = f(x;y). J. Comput. Appl. Math. 2000, 126, 47–75. [Google Scholar] [CrossRef] [Green Version]
- Avdelas, G.; Simos, T.E.; Vigo-Aguiar, J. An embedded exponentially-fitted Runge-Kutta method for the numerical solution of the Schrodinger equation and related periodic initial-value problems. Comput. Phys. Commun. 2000, 131, 52–67. [Google Scholar] [CrossRef]
- Franco, J.M. An embedded pair of exponentially fitted explicit Runge-Kutta methods. J. Comput. Appl. Math. 2002, 149, 407–414. [Google Scholar] [CrossRef] [Green Version]
- Bettis, D.G. Runge-Kutta algorithms for oscillatory problems. J. Appl. Math. Phys. (ZAMP) 1979, 30, 699–704. [Google Scholar] [CrossRef]
- Vanden Berghe, G.; Meyer, H.D.; Daele, M.V.; Hecke, T.V. Exponentially-fitted explicit Runge-Kutta methods. Comput. Phys. Commun. 1999, 123, 7–15. [Google Scholar] [CrossRef]
- Vanden Berghe, G.; Meyer, H.D.; Daele, M.; Hecke, T. Exponentially fitted Runge-Kutta methods. J. Comput. Appl. Math. 2000, 125, 107–115. [Google Scholar] [CrossRef] [Green Version]
- Ngwane, F.F.; Jator, S.N. Trigonometrically–fitted second derivative method for oscillatory problems. SpringerPlus 2014, 3, 304. [Google Scholar] [CrossRef] [Green Version]
- Zhai, W.; Chen, B. Exponentially Fitted RKNd Methods for Solving Oscillatory ODEs. Adv. Math. 2013, 42, 393–404. [Google Scholar]
- Franco, J. Exponentially fitted explicit Runge-Kutta-Nystrom methods. J. Comput. Appl. Math. 2004, 167, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Van de Vyver, H. A Runge-Kutta-Nystrom pair for the numerical integration of perturbed oscillators. Comput. Phys. Commun. 2005, 167, 129–142. [Google Scholar] [CrossRef]


{kind=link}
| i | RK-8 | |||||
|---|---|---|---|---|---|---|
| 0 | 8.256847 | 1.701678 | 0.000000 | 0.000000 | 0.000000 | 2.220446 |
| 1 | 5.921881 | 1.485065 | 1.516774 | 1.160079 | 4.170189 | 9.992007 |
| 2 | 9.221257 | 6.125912 | 6.400131 | 1.488434 | 6.878617 | 7.895672 |
| 3 | 1.154806 | 2.425554 | 3.548604 | 1.3173 | 3.317455 | 7.396323 |
| i | RK-8 | |||||
|---|---|---|---|---|---|---|
| 0 | 2.385689 | 2.385402 | 6.994405 | 5.77316 | 1.210143 | 3.719247 |
| 1 | 2.779917 | 2.410011 | 1.507892 | 1.467305 | 4.454081 | 7.805366 |
| 2 | 1.036922 | 2.413778 | 2.714209 | 4.764676 | 6.398771 | 1.120104 |
| 3 | 1.466513 | 2.377447 | 4.035951 | 4.450952 | 4.873151 | 5.310473 |
| 4 | 4.728532 | 1.336235 | 1.392109 | 1.123486 | 1.137188 | 1.153992 |
| 5 | 5.249947 | 5.711746 | 1.162043 | 6.347695 | 3.808664 | 4.012365 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wusu, A.S.; Olabanjo, O.A.; Mazzara, M. Exponentially-Fitted Fourth-Derivative Single-Step Obrechkoff Method for Oscillatory/Periodic Problems. Mathematics 2022, 10, 2392. https://doi.org/10.3390/math10142392
Wusu AS, Olabanjo OA, Mazzara M. Exponentially-Fitted Fourth-Derivative Single-Step Obrechkoff Method for Oscillatory/Periodic Problems. Mathematics. 2022; 10(14):2392. https://doi.org/10.3390/math10142392
Chicago/Turabian StyleWusu, Ashiribo Senapon, Olusola Aanu Olabanjo, and Manuel Mazzara. 2022. "Exponentially-Fitted Fourth-Derivative Single-Step Obrechkoff Method for Oscillatory/Periodic Problems" Mathematics 10, no. 14: 2392. https://doi.org/10.3390/math10142392
APA StyleWusu, A. S., Olabanjo, O. A., & Mazzara, M. (2022). Exponentially-Fitted Fourth-Derivative Single-Step Obrechkoff Method for Oscillatory/Periodic Problems. Mathematics, 10(14), 2392. https://doi.org/10.3390/math10142392