
Mechanical Model and FEM Simulations for Efforts on Biceps and Triceps Muscles under Vertical Load: Mathematical Formulation of Results

 , , and
, , and
Abstract
:1. Introduction
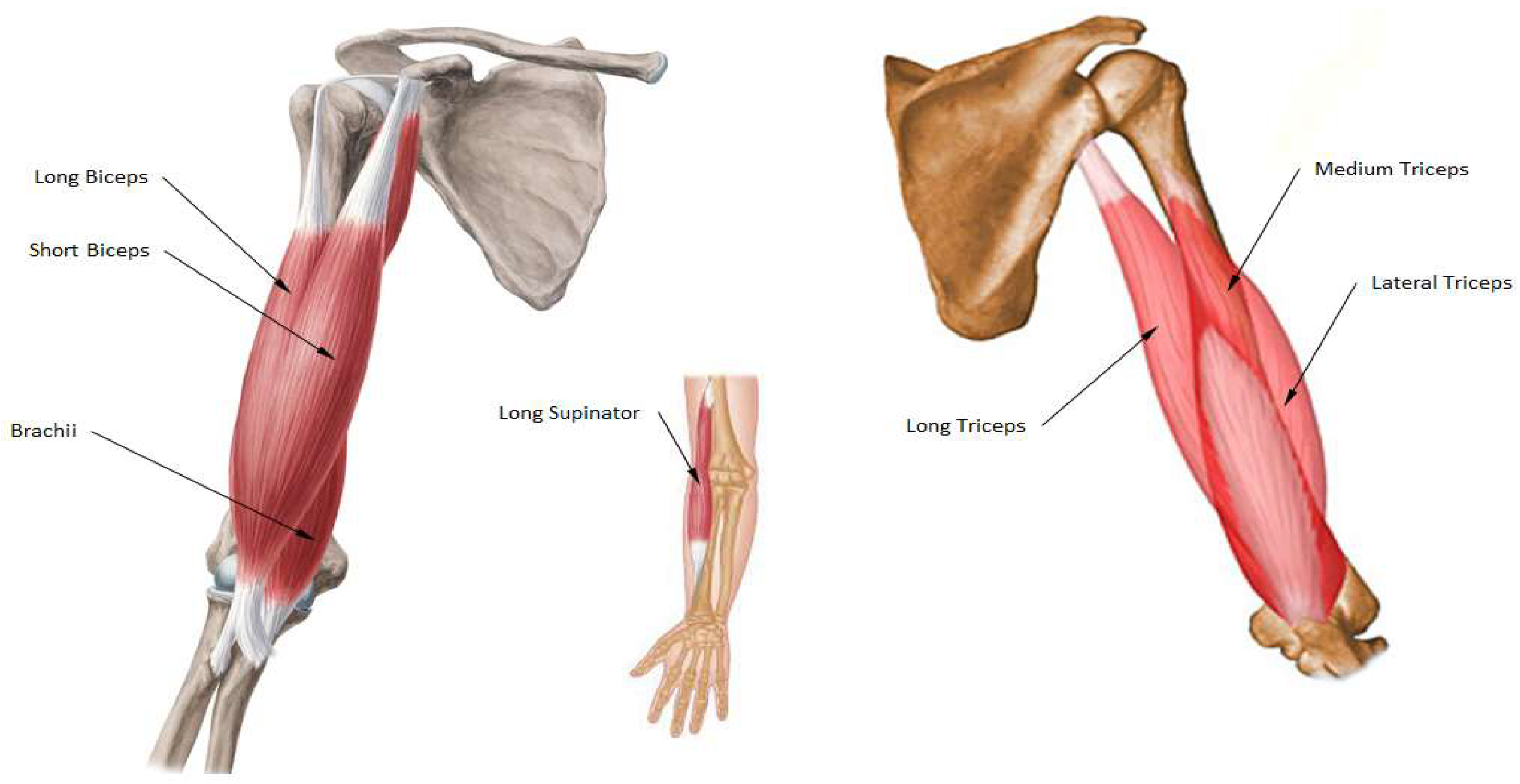
- Long biceps
- Short biceps
- Brachii
- Long supinator
- Long triceps
- Medium triceps
- Lateral triceps
- Analyzing the elbow under load at different angles;
- Obtaining efforts in different muscles involved in the joint for different positions;
- Defining mathematical models to predict efforts in muscles depending on:
- Joint angle or muscle length;
- Applied load on the wrist.
2. Materials and Methods
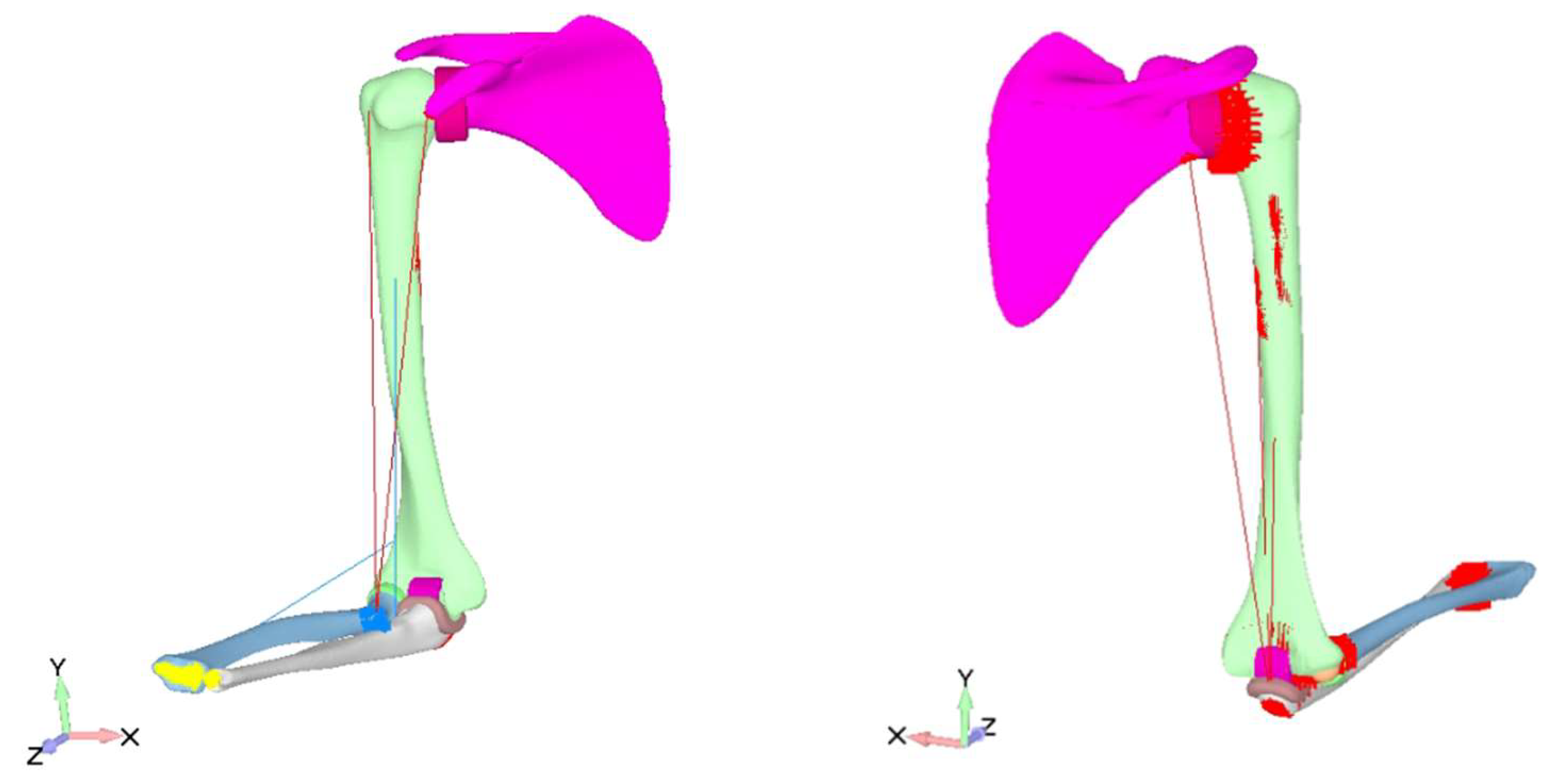
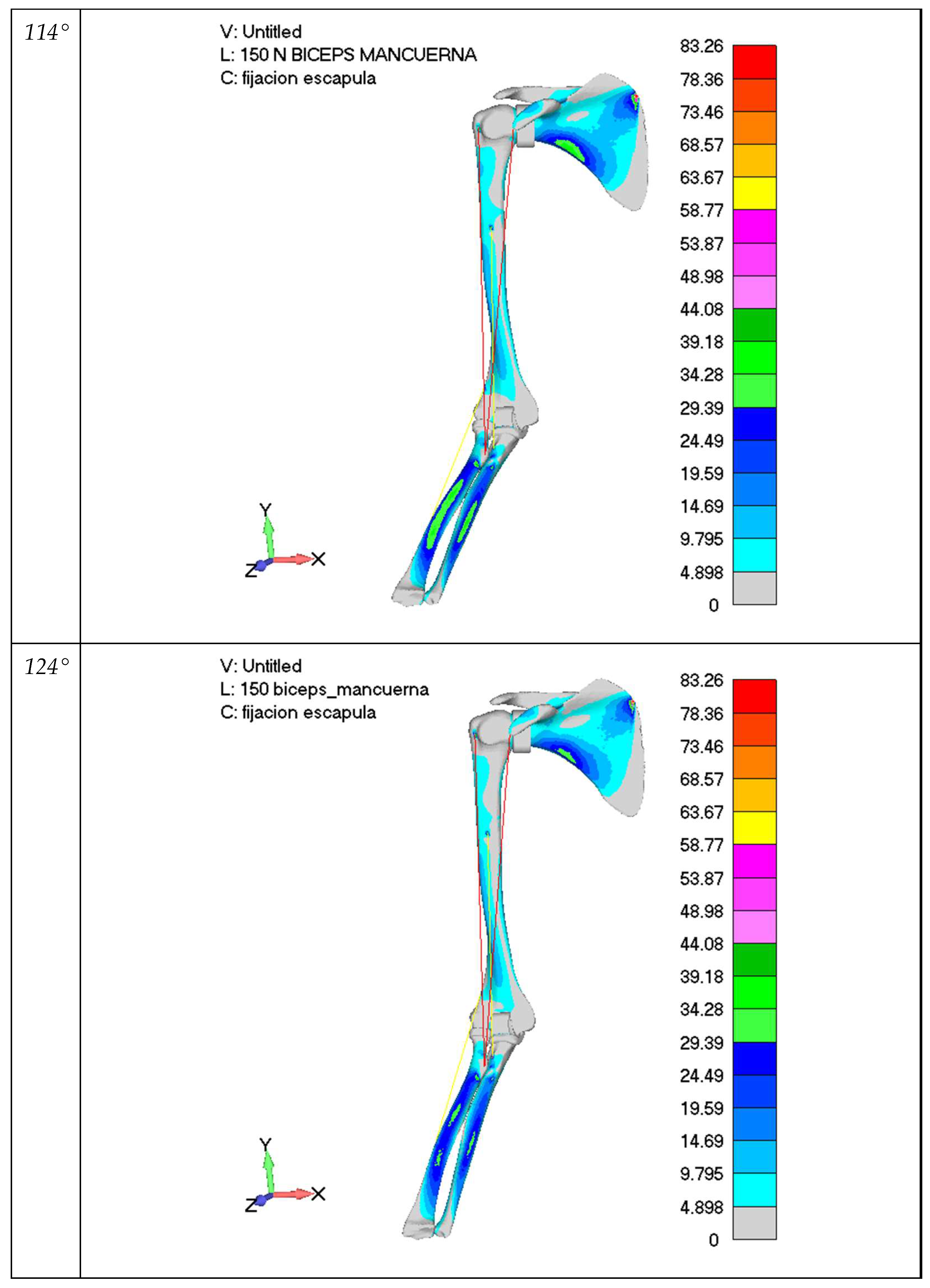
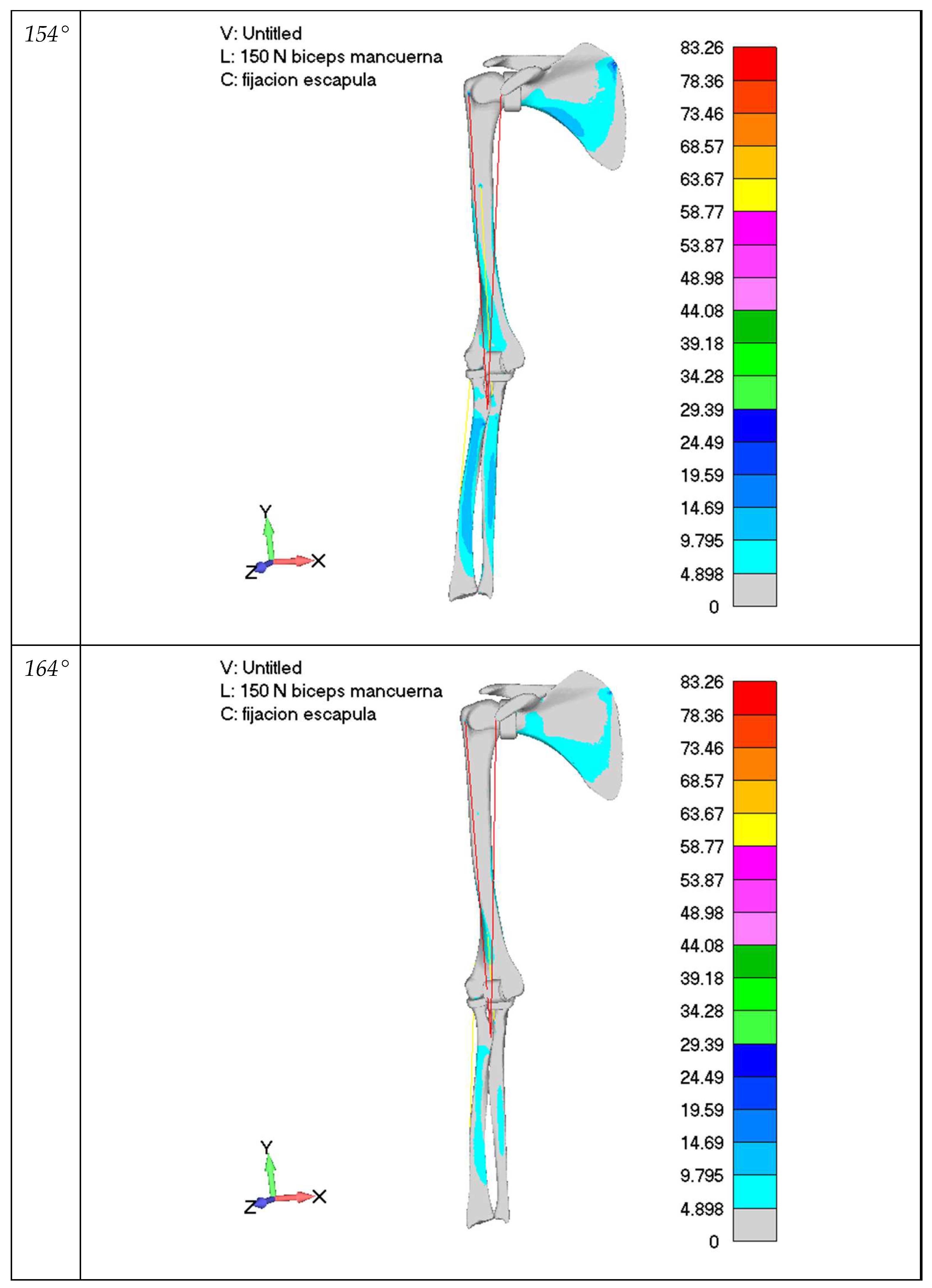
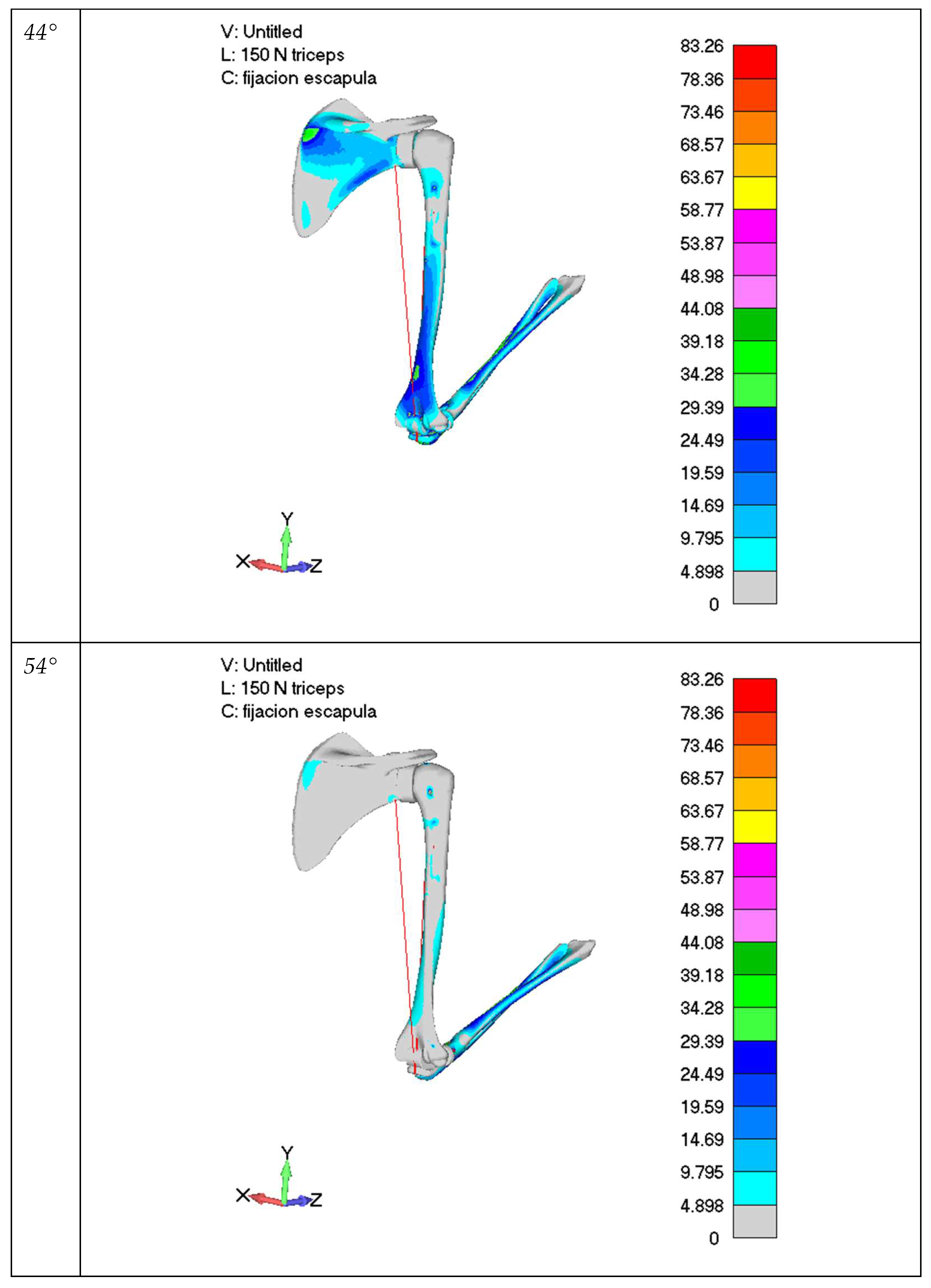
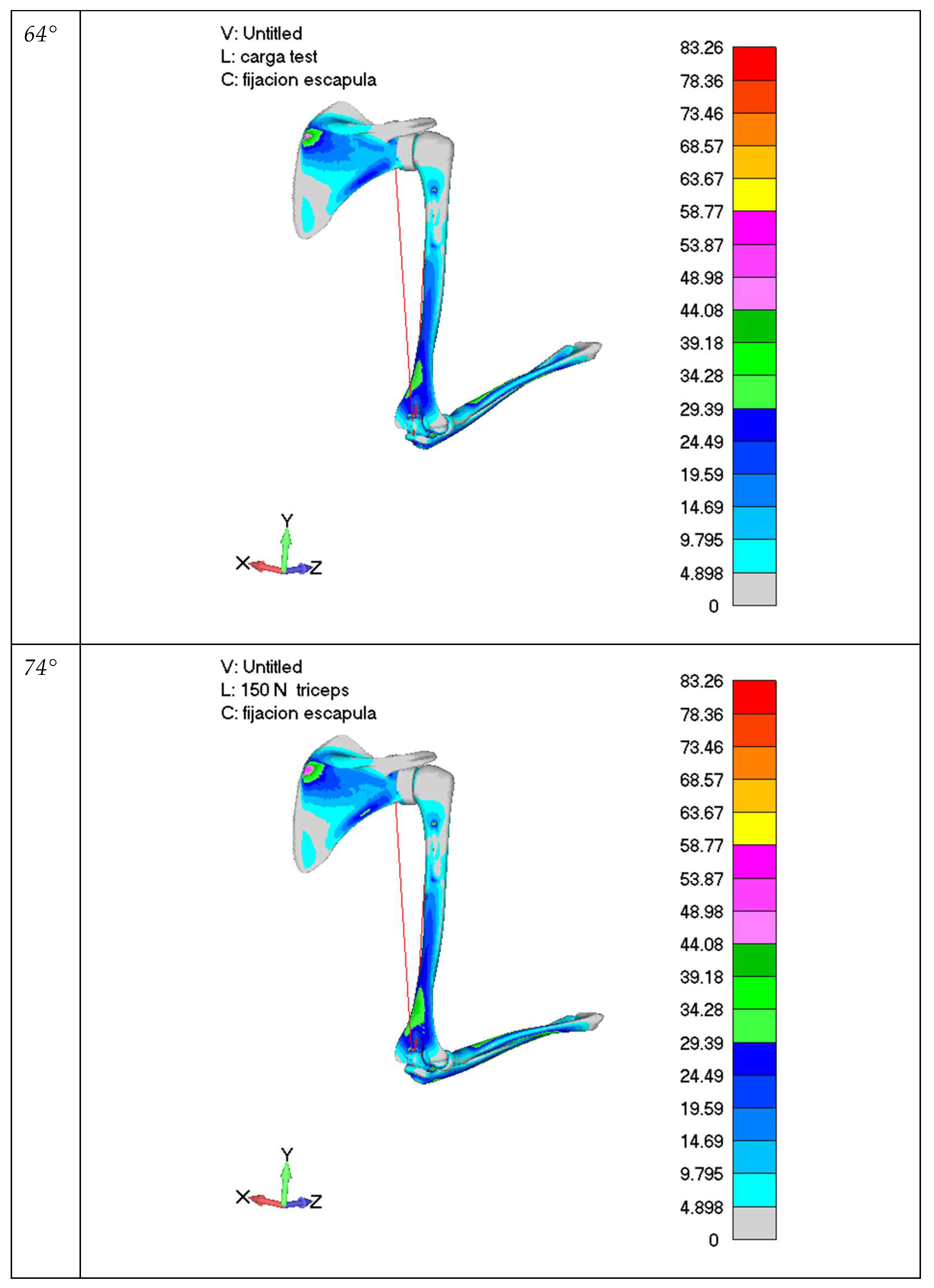
- Finite element models of the mechanism of elbow joint. The 3D anatomical model developed is based on two diagnostic imaging techniques. CT for the bones and MRI for the muscles. From this three-dimensional model, different FEM models were generated, for biceps and triceps muscles studies.
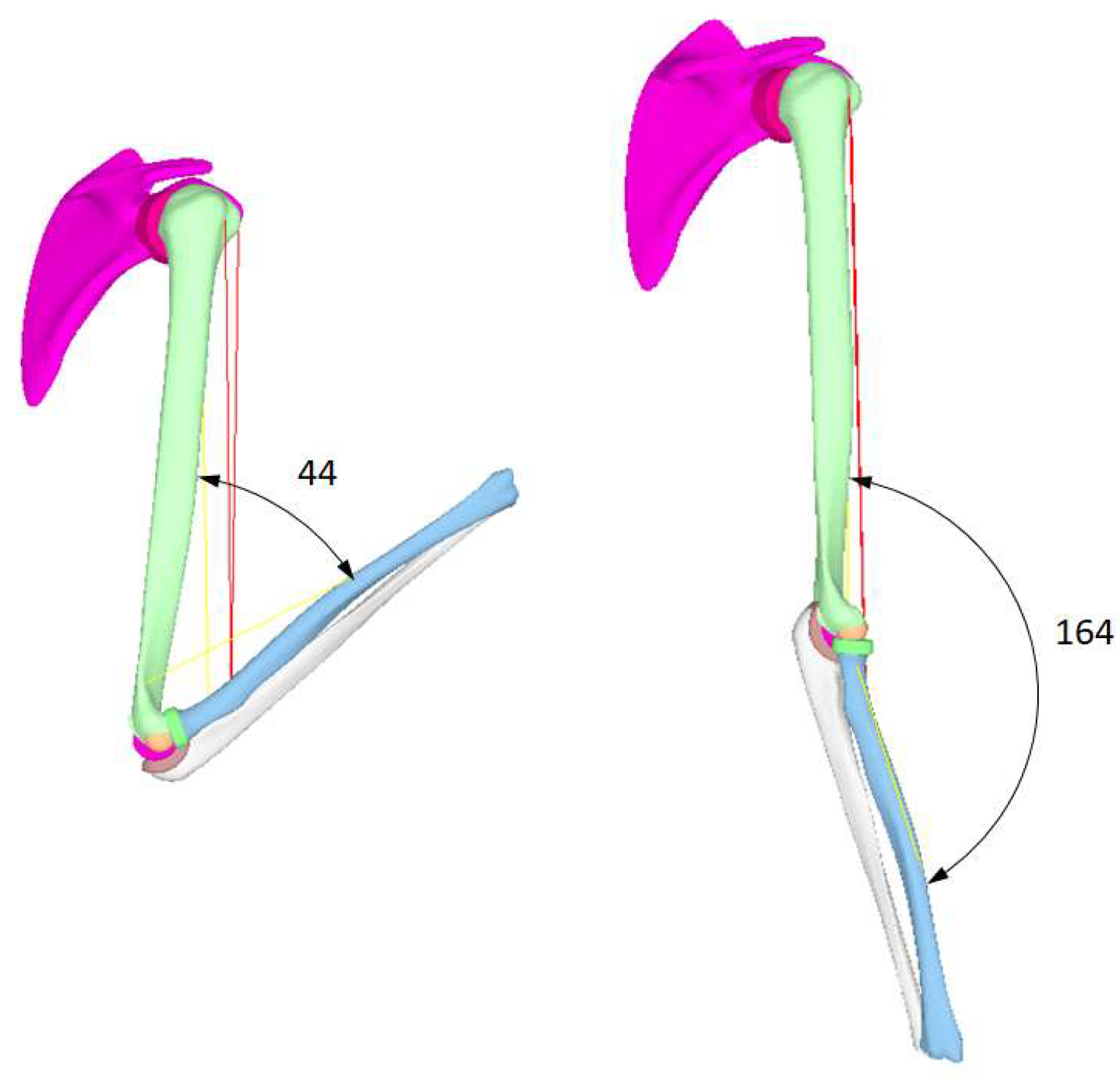
- Mathematical models predicting efforts in muscles studied. From FEM models, isometric muscle efforts will be obtained for a vertical load applied on wrist, 150 N including forearm mass, at different angles of aperture in the joint, from 44 to 164 degrees. These efforts will be extrapolated for any load applied on the wrist.
2.1. Finite Element Model
2.1.1. FEA Model Creation Meshing Process, Element Types
- Bones. They are meshed using 3D elements (tetrahedral type, 2nd order, 10 nodes). Teo et al. [26] use 3D elements for meshing neck and head parts of the joints in their study. In the same way, Donahue et al. [27] use 3D elements with axisymmetric condition, to model knee parts involved in the study.
- Bone cartilage junction. Since the cartilage and bone form a solidary union between both parts, during the meshing process, a coincidence of the nodes of the bone and the cartilage in the contact area has been carried out. By ensuring that the bone and cartilage nodes coincide in that area, it is possible to ensure that the transmission of efforts between both parts is correct.
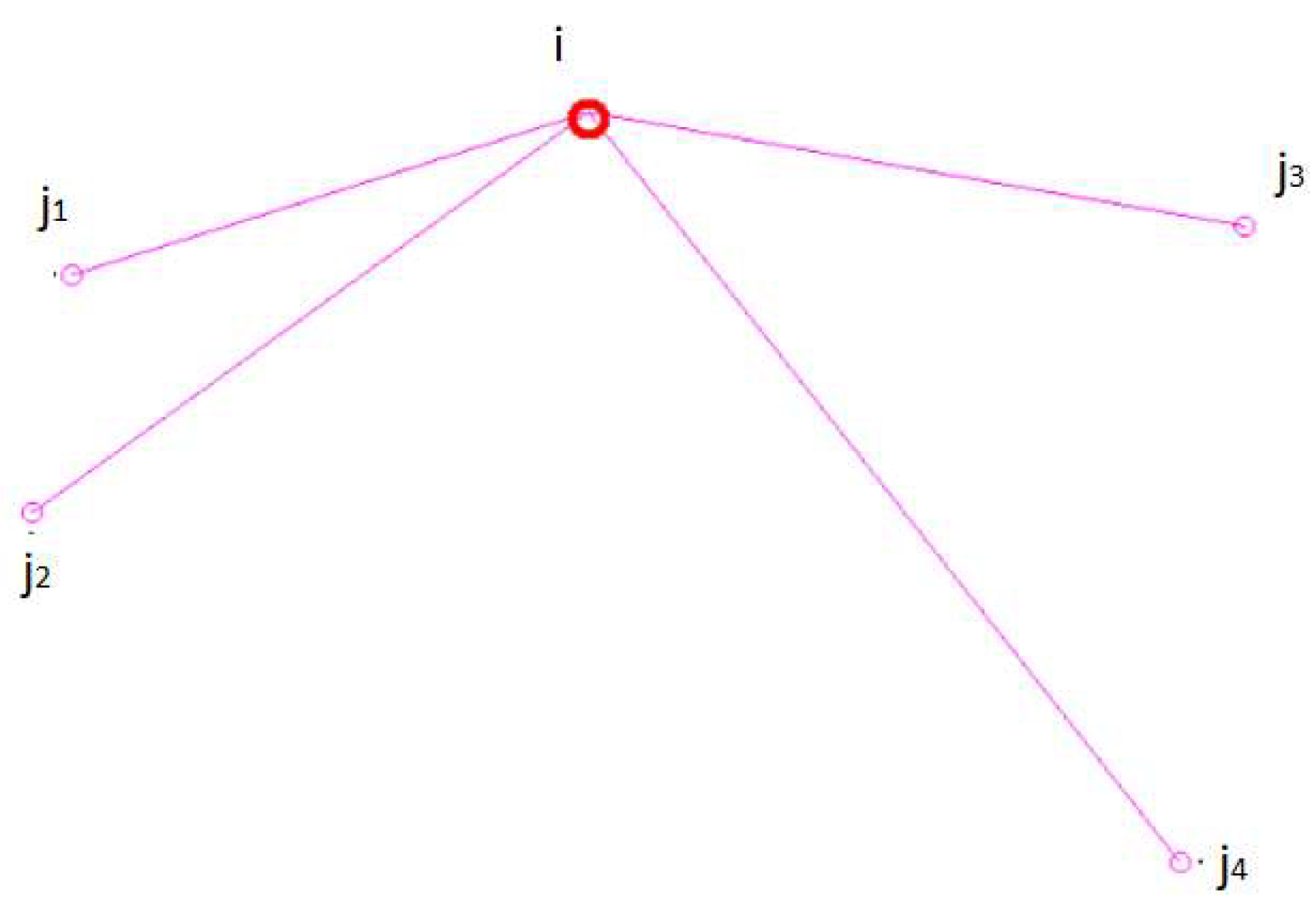
- Contact between cartilages. It has been modeled using rigid elements that join the nodes of both cartilage meshed parts involved in the joint, as explained in previous studies [25], using an RBE2 element. In the RBE2 elements used, the degrees of rotation freedom have been released so that only forces are transmitted in the X, Y or Z axes.
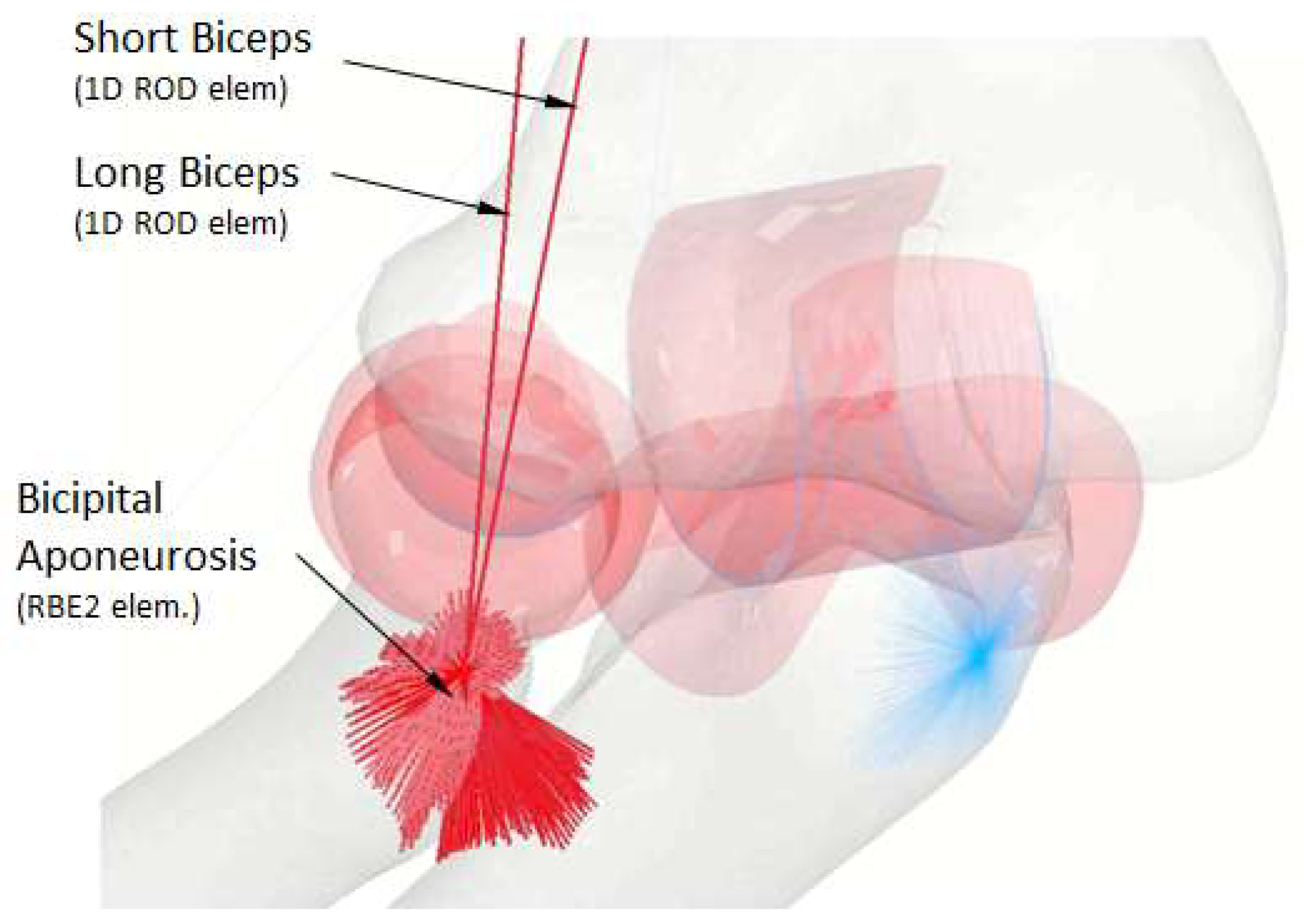
- Muscles. These are meshed using 1D elements (the type is discussed in this study). Previous studies have considered muscles in this manner, as 1D element acting along the imaginary axis of the muscle. Alonso et al. [20] model muscles in the leg to study human march in the same manner, 1D elements aligned with the axis of the muscles; Sachenkov et al. [29] use the same approximation for muscles, Parekh [30] approximates muscles to a 1D FEM element aligned with the muscle axis. This is a simplification, but it is used by several authors because fusiform muscles only have two insertion points and low pennation angles. Thus, fibers are aligned so with this imaginary axis which is formed by joining both insertion points.
- Tendons. These are meshed in combination with muscles, as a unique element musculotendon (MTU). The same 1D element is considered for tendons.
- Tendon insertion in bone. It has been modeled by adding a rigid element (RBE2), joining the end node of the 1D MTU element with several nodes in the bone, and thus distributing the reaction force in the area of the insertion of the tendons, as explained in previous research [25]. Of the restrictions that an element with these characteristics can apply, only the displacements in the X, Y or Z axes have been applied, freeing the turns around them. In this way, and since the MTU only transmits axial forces, we eliminate any possible bending moments that may affect the insertion of the tendon in the bone.
2.1.2. FEA Model Creation Muscles Modeling
- It works only in traction.
- The force of the element used must be generated along the axis that joins the two nodes that define it; it must not have transverse forces.
- It must not present deformations or displacements that alter the isometric character of the contraction studied. Therefore, the deformations have to be low.
- The 1D-type elements existing in FEM analysis tools are described below, also indicating the reasons that lead us to discard them as valid for our purpose.
- Constant spring stiffness. In this case, the results are not valid, since a spring delivers the force along a curve according to the equation F = K·x, where K is its stiffness (N/mm) and x is its elongation (mm). The use of this element would mean that a muscle would deliver a single force value for a given length, which is not true. A muscle at a given length is capable of delivering a force between 0 and the maximum force that muscle fibers are capable of developing.
- Variable spring stiffness. For the same reason as before, although in this case the maximum force could adjust according to the length of the muscle, it does not serve the purpose of the proposed study. The muscle can deliver a force between 0 and the maximum force for a given length. In the case of using a spring element, there is also the drawback of not always being able to balance the joint and the present study would no longer be isometric.
- Beam element. With this element, it is possible to obtain the necessary force in the joint to balance it. Beam elements are characterized in that they present axial, shear, and bending forces, and the muscles only transmit axial tensile forces.
- Rod element. The use of this element meets the study requirements; it only transmits axial forces, and we can decide on a rigidity in it such that the joint does not present large displacements and therefore it is no longer considered an isometric contraction.
- ▪
- Rod element (1D element);
- ▪
- Constant cross section: 100 mm²;
- ▪
- Material parameters:
- ▪
- Young modulus: 2000 MPa;
- ▪
- Poisson coefficient: 0.43.
- F is the axial force in the element;
- M is the moment along the axis of the element;
- Kx is the axial stiffness of the element;
- KT is the rotational stiffness along the axis of the element;
- εx is the length variation of the element;
- αx is the angle rotated along the element axis;
2.1.3. Material Properties
- Second-order tetrahedral elements, 10 nodes;
- Nominal element size 1.5 mm.
2.1.4. Mesh Resume
- Number of elements: 548,139;
- Number of nodes: 821,755;
- Number of second-order tetrahedral elements: 546,035;
- Number of 1D ROD elements: 4 (for biceps analysis) 3 (for triceps analysis);
- Number of rigid elements RBE2: 2100.
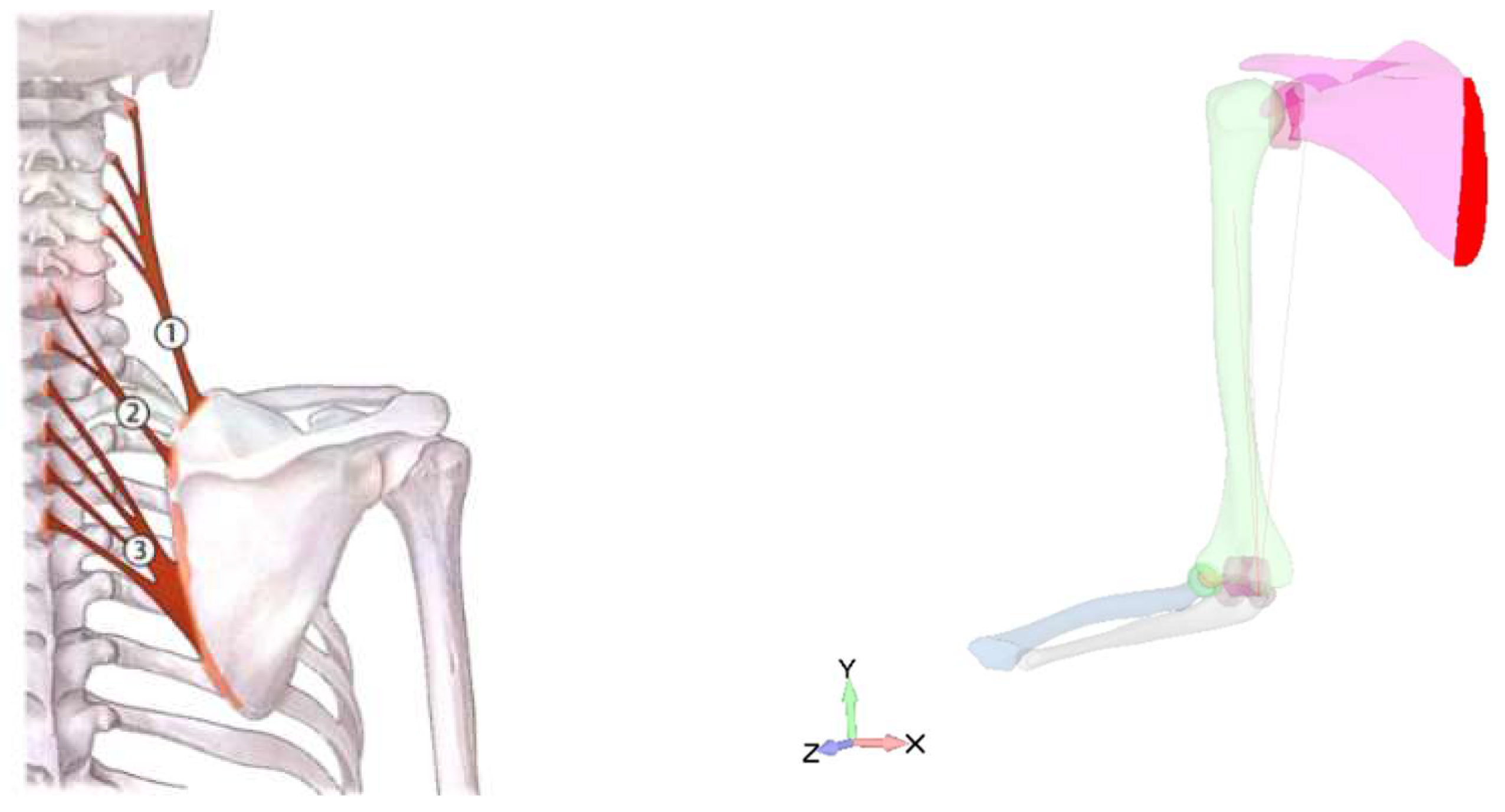
2.1.5. Boundary Conditions
- Levator scapula muscle;
- Rhomboid minor muscle;
- Rhomboid major muscle.
2.1.6. Load Application
- Forearm mass: 2.5 kg;
- Upper arm mass: 4.3 kg.
2.1.7. Design of Experiment
2.1.8. FEA model Solution
- Windows 10, 64-bit, operating system;
- Intel(R) Core (TM) i9-10900X CPU @ 3.70 GHz Processor (20 cores);
- 128 GB RAM memory;
- 1 TB SSD disk drive.
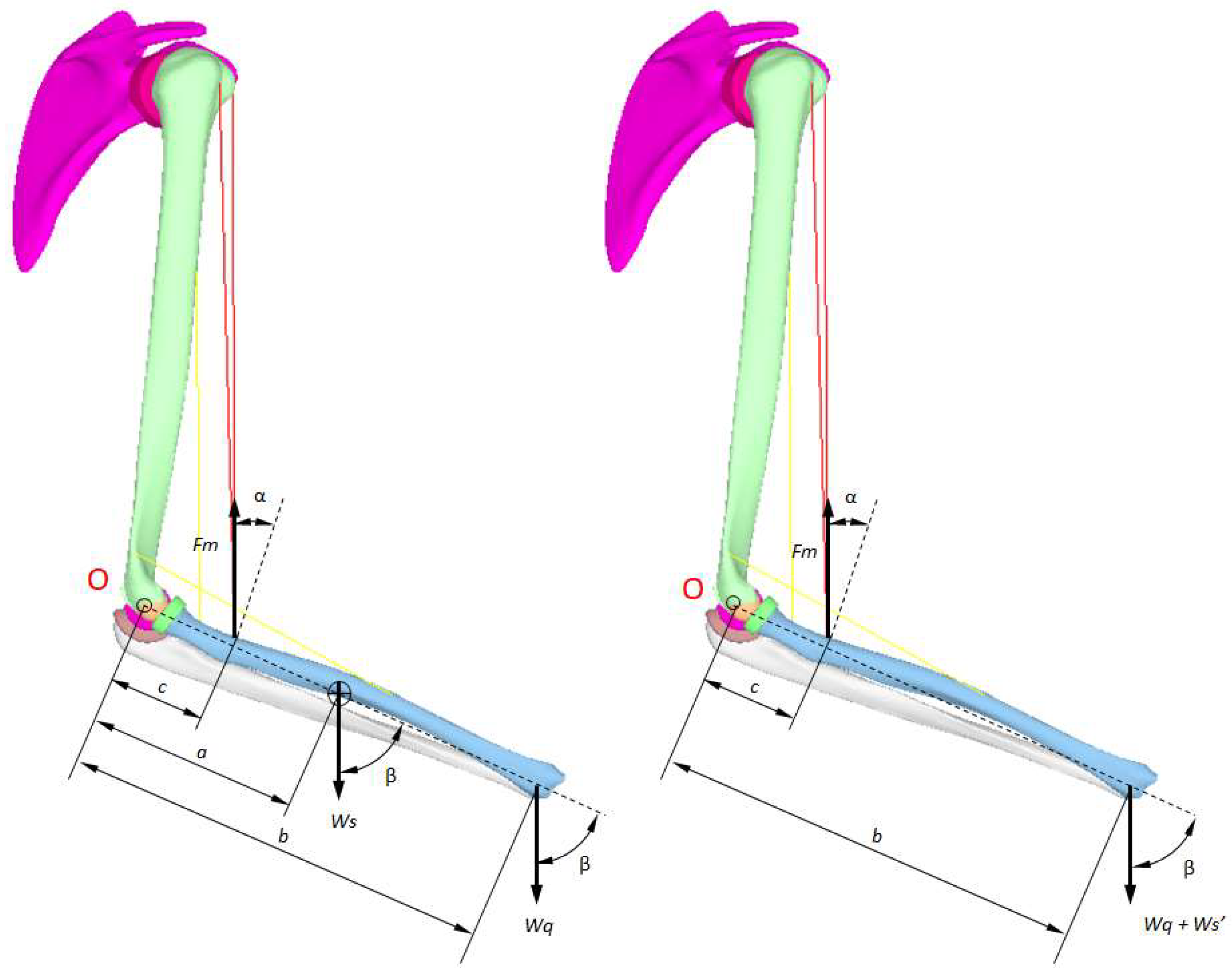
2.2. Mathematical Approach
- means the weight of the forearm;
- means the equivalent force for Ws applied at the wrist. The moment created by Ws or Ws′ is the same referred to O point;
- means the load applied in the wrist;
- α means the angle between biceps axis and the normal to the radius longitudinal axis;
- β means the angle between the vertical and the longitudinal axis of the radius;
- a, b and c are geometrical dimensions.
- Muscle length (or elbow angle);
- Force applied to wrist.
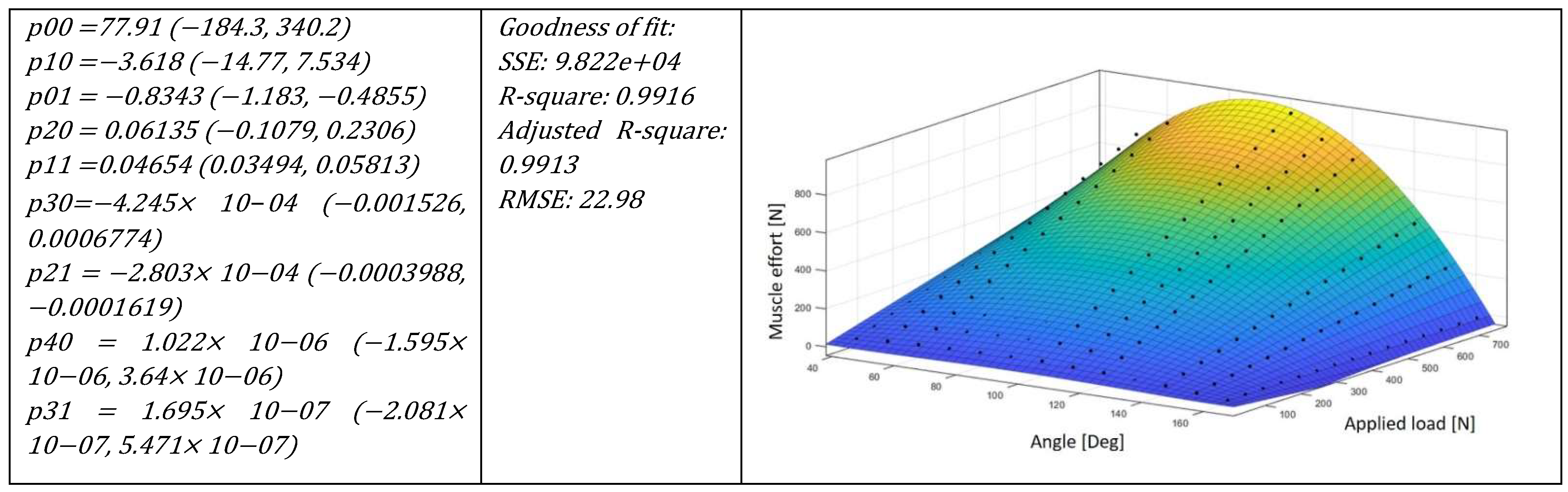
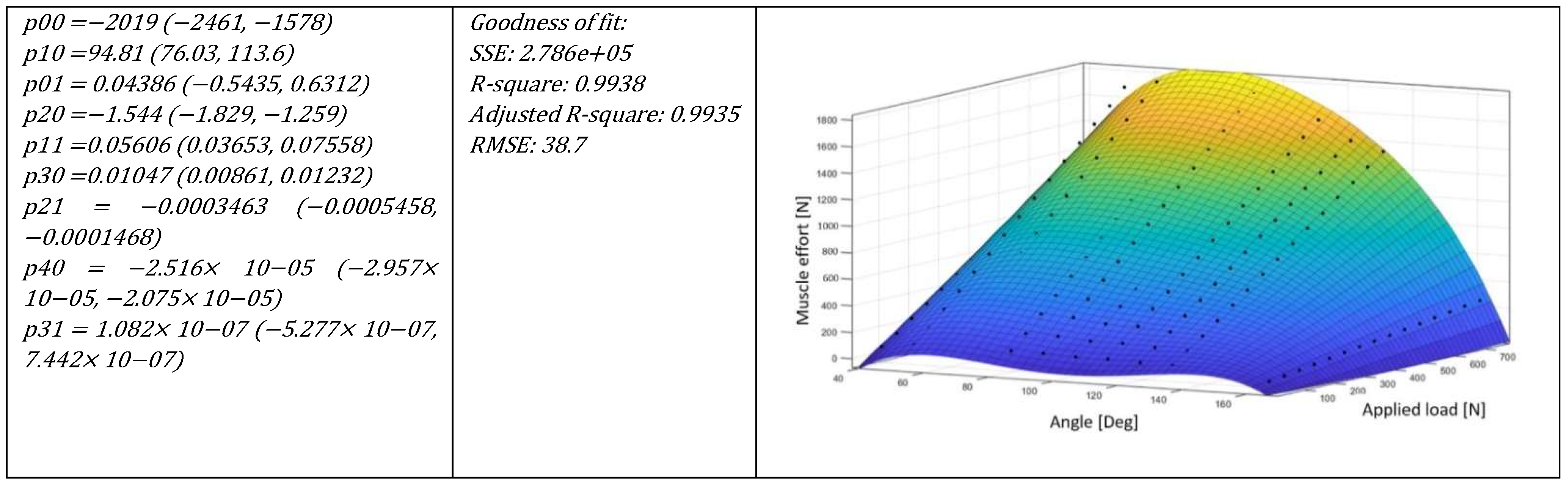
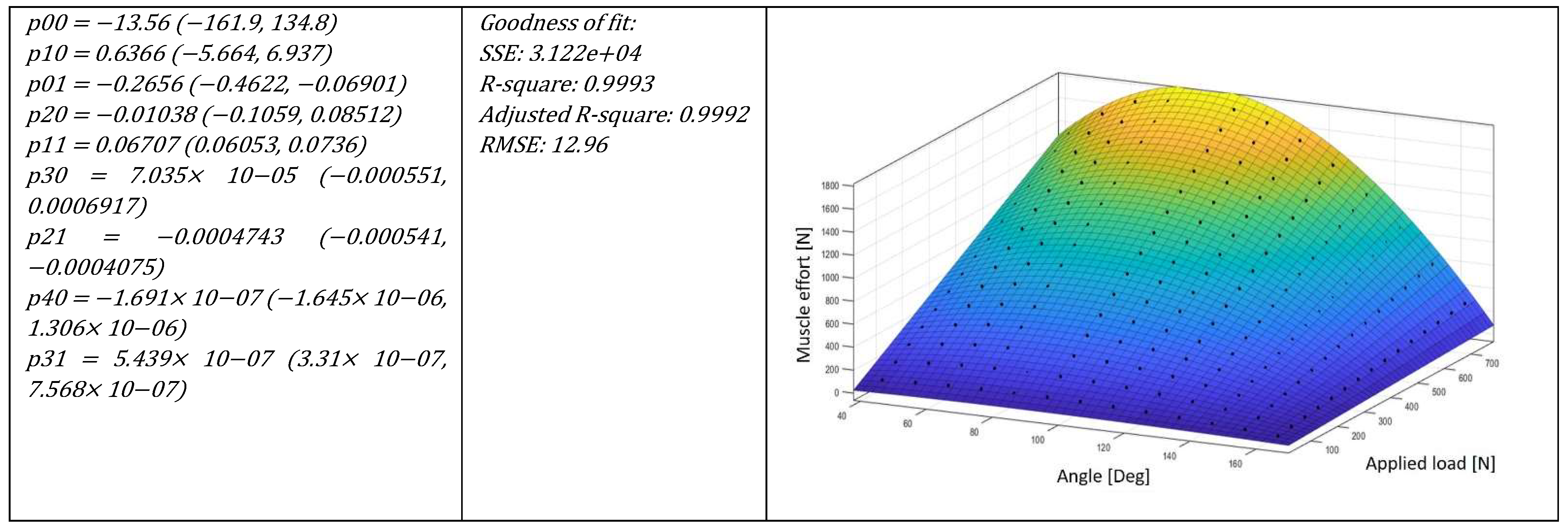
- is the force in the muscle (N);
- α is the angle of the elbow;
- , is the load applied on the wrist (N).
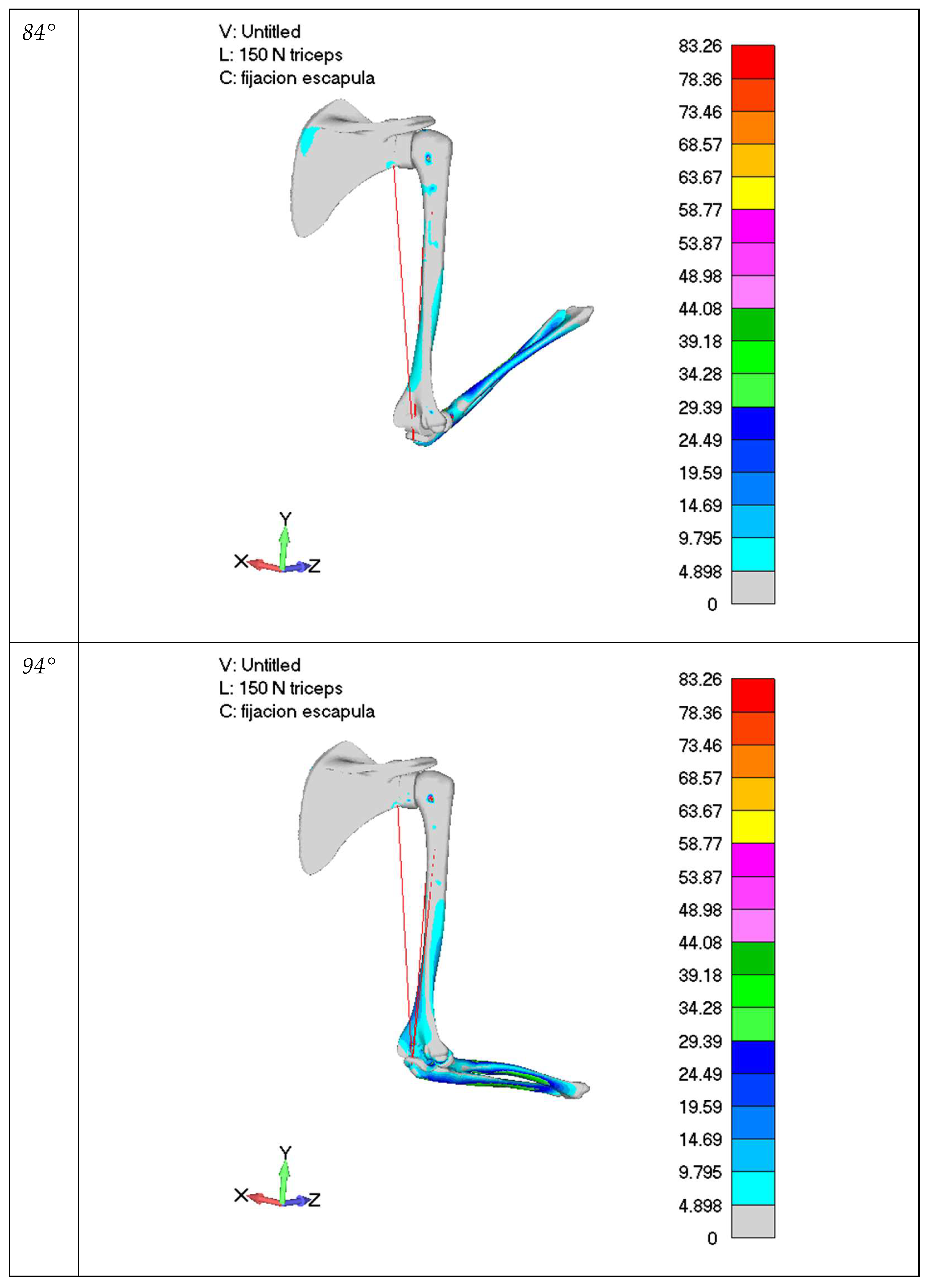
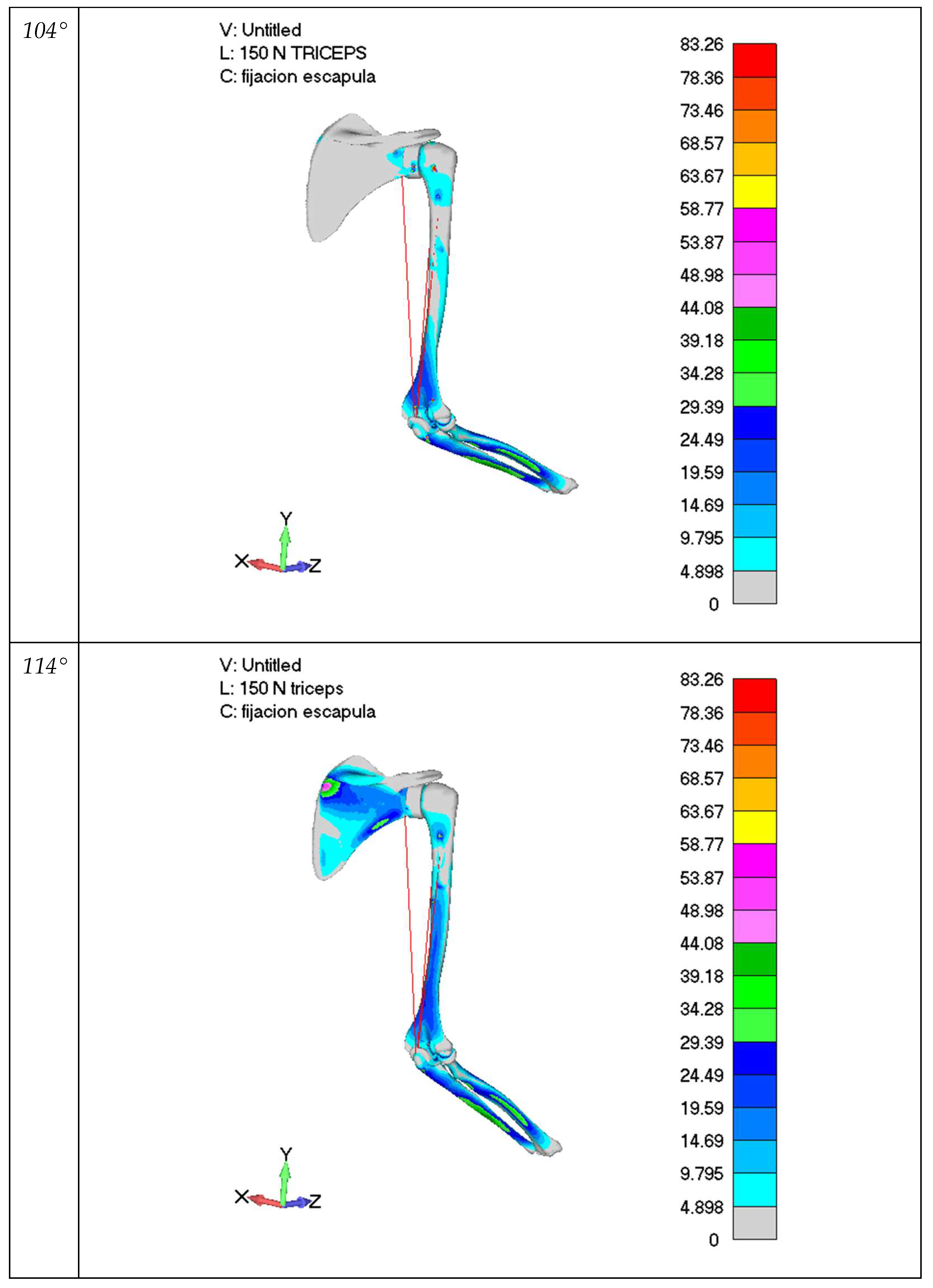
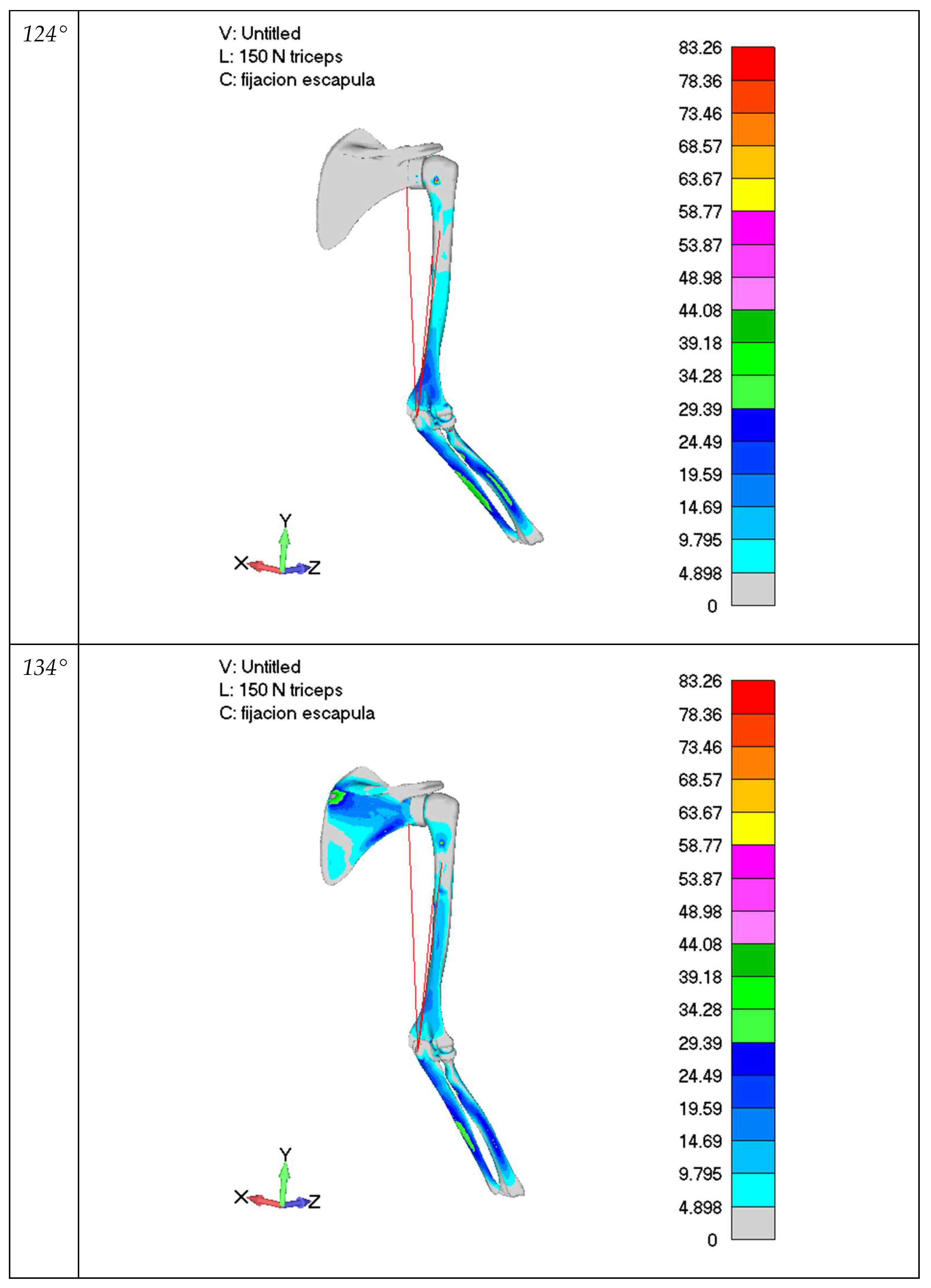
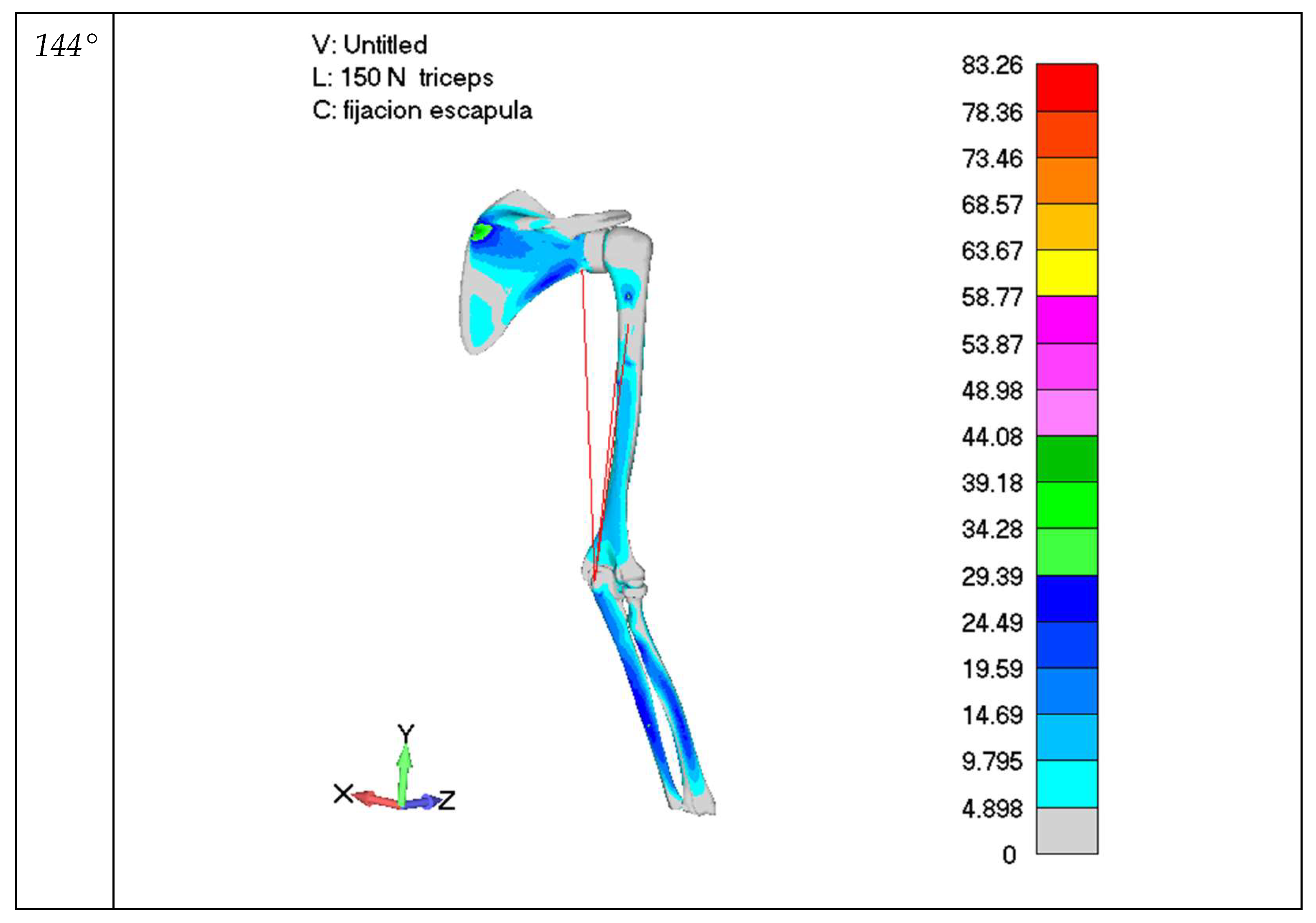
3. Results
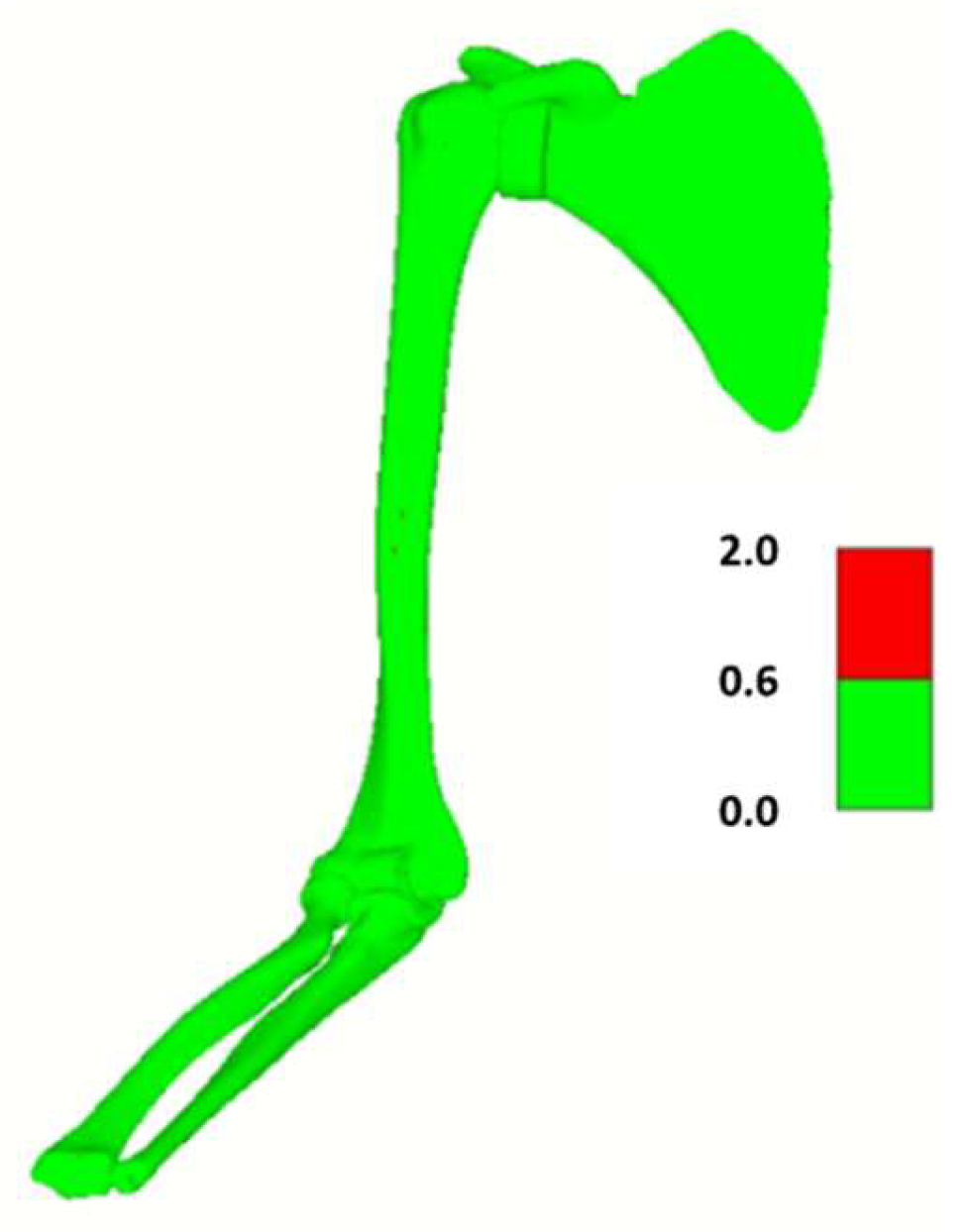
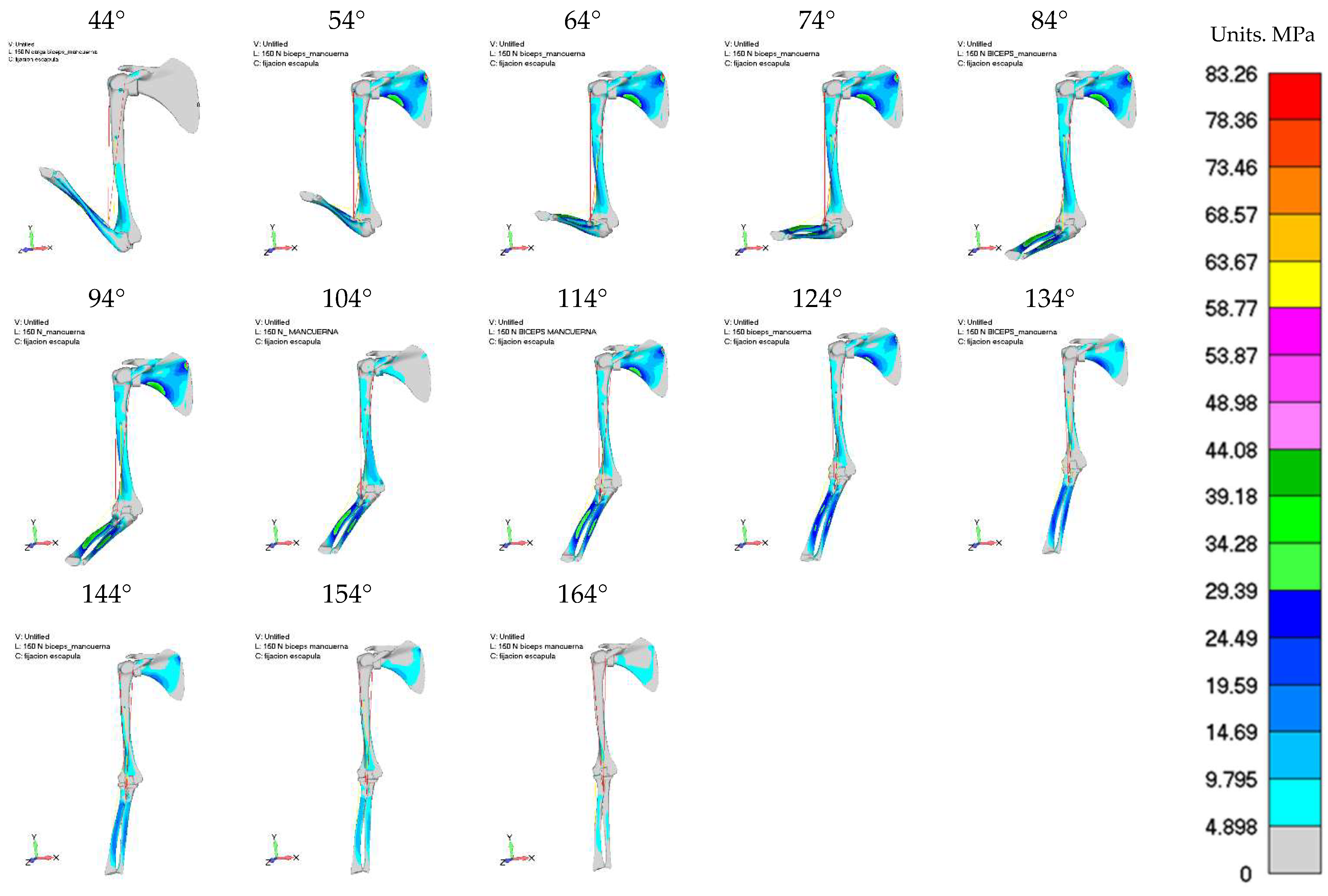
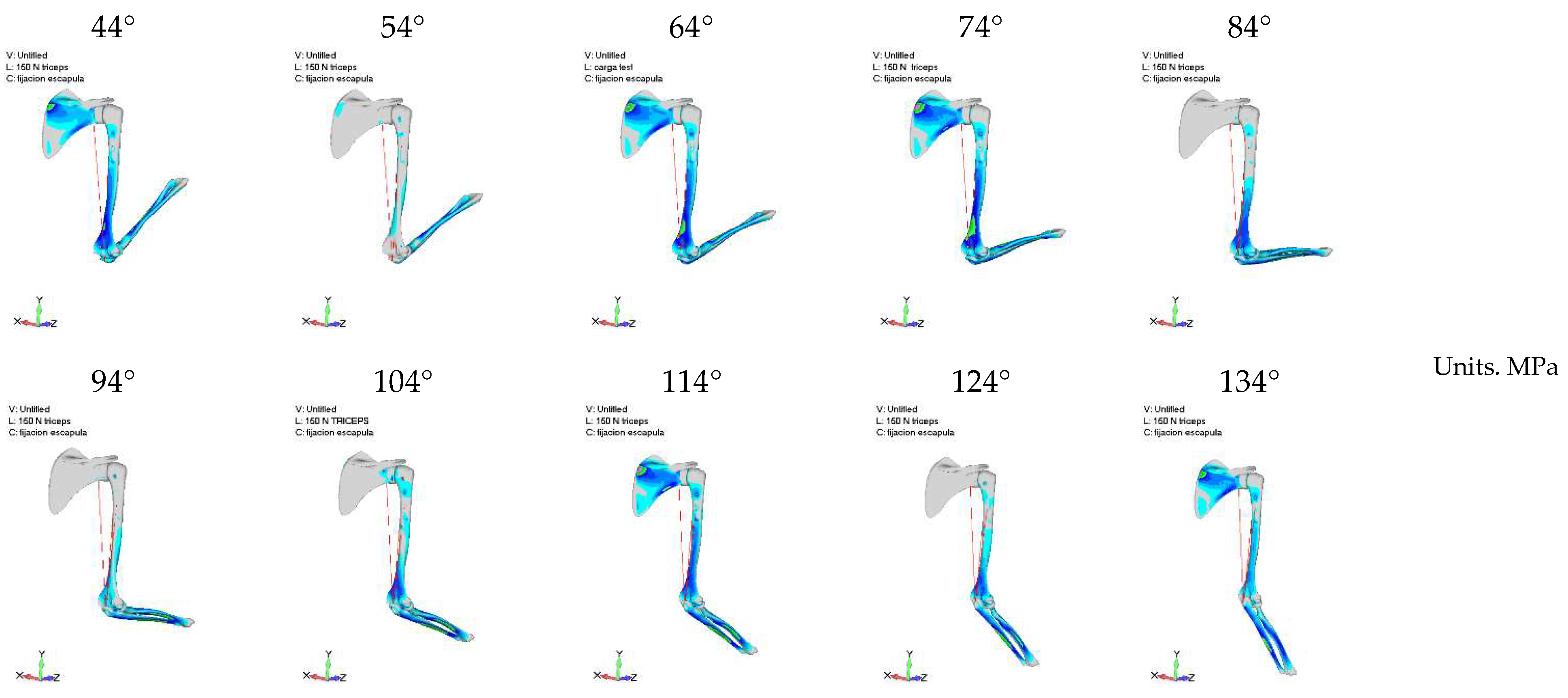
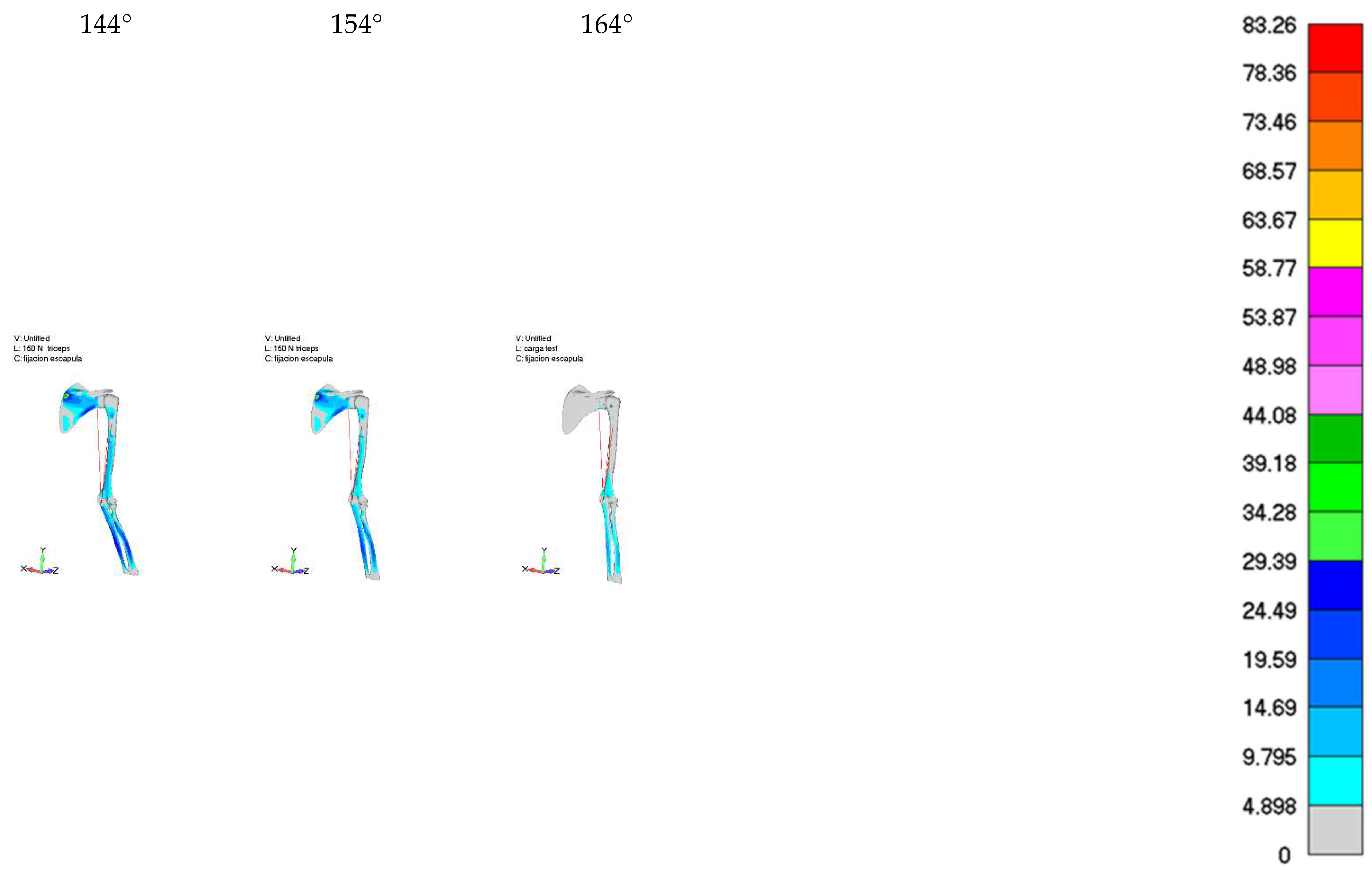
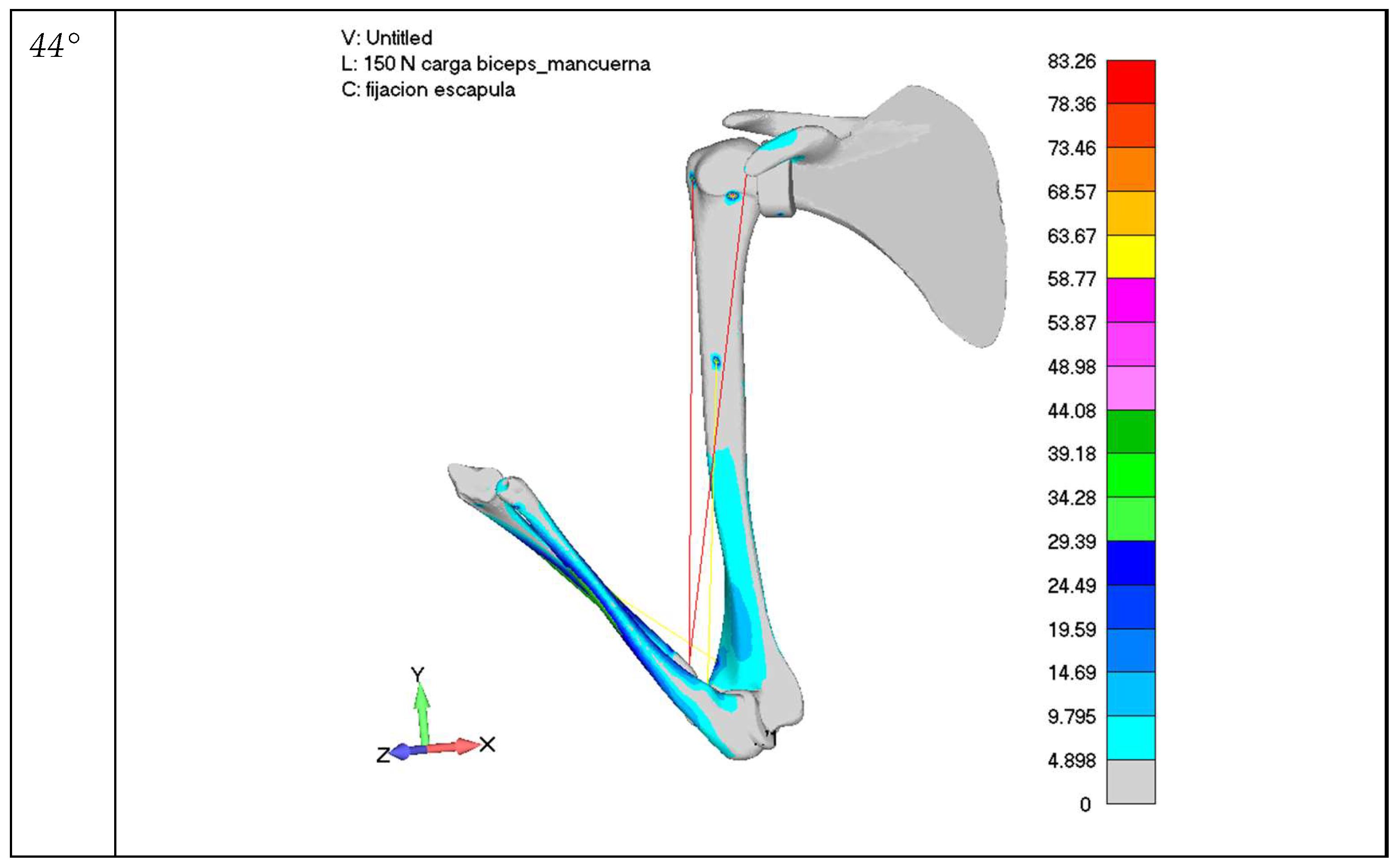
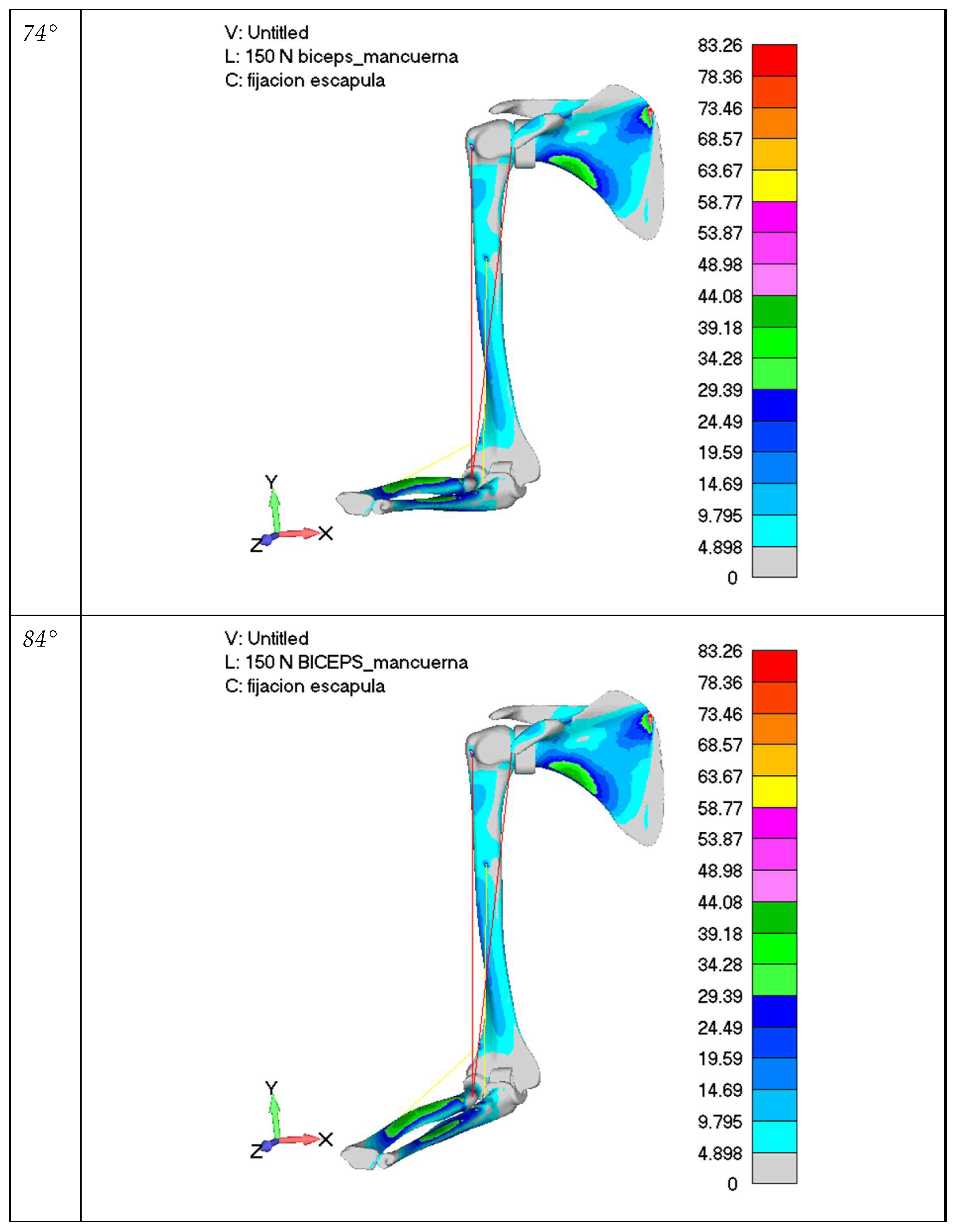
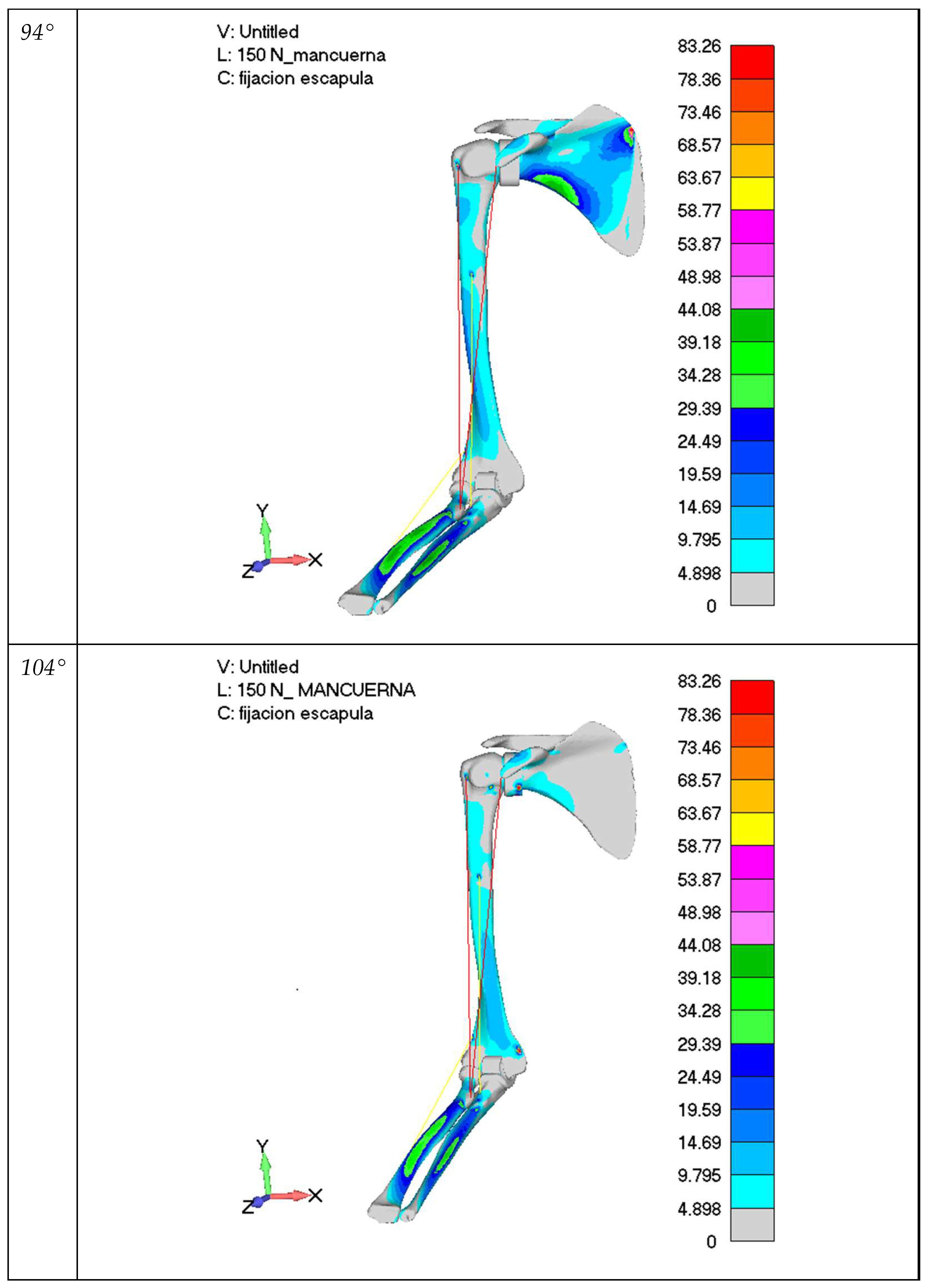
3.1. FEM Simulations, 3D Results
3.2. Numerical Axial Efforts on Main Different Muscles
- Biceps muscles (long and short biceps);
- Triceps muscles (lateral, medial and long triceps).
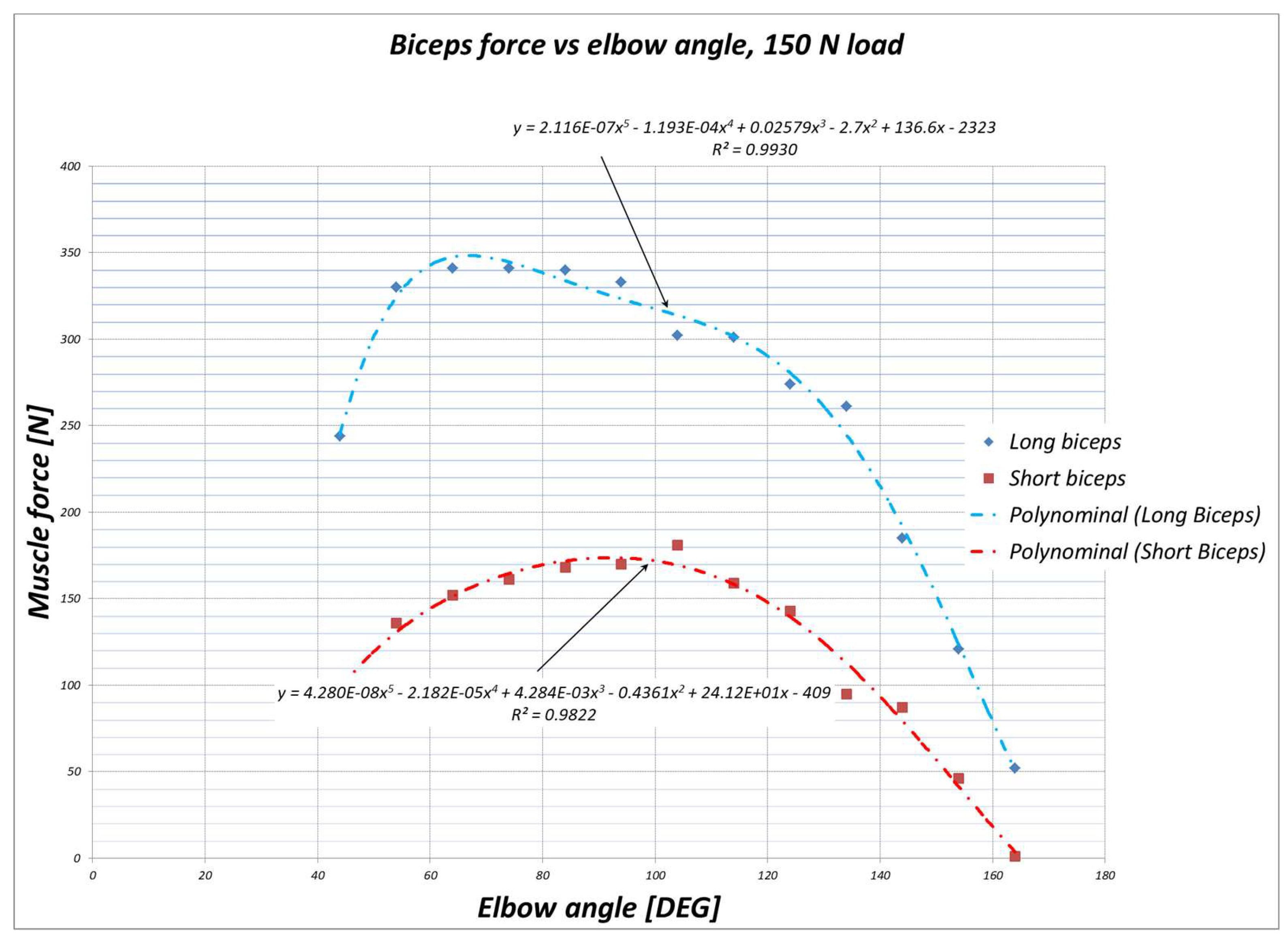
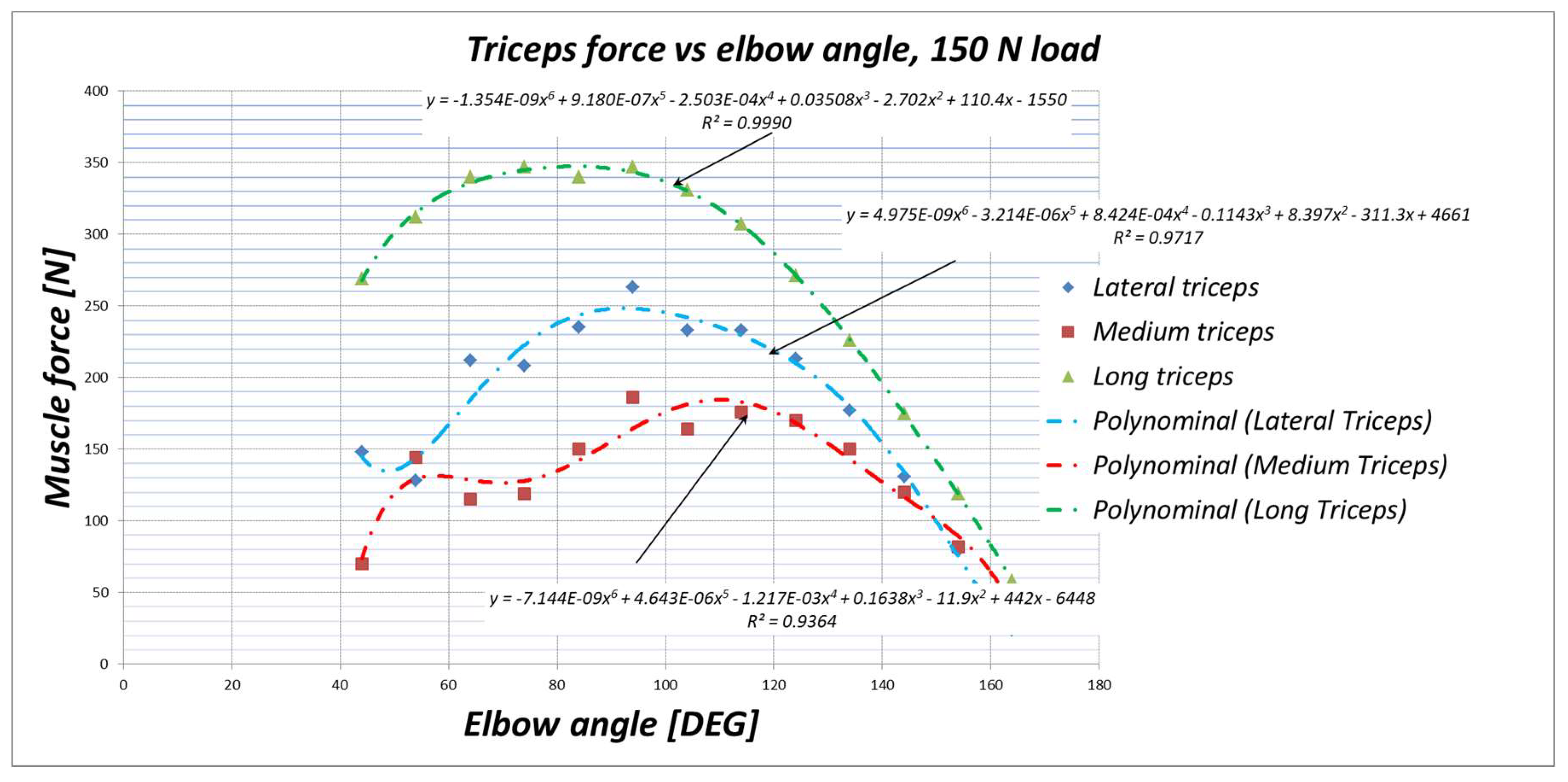
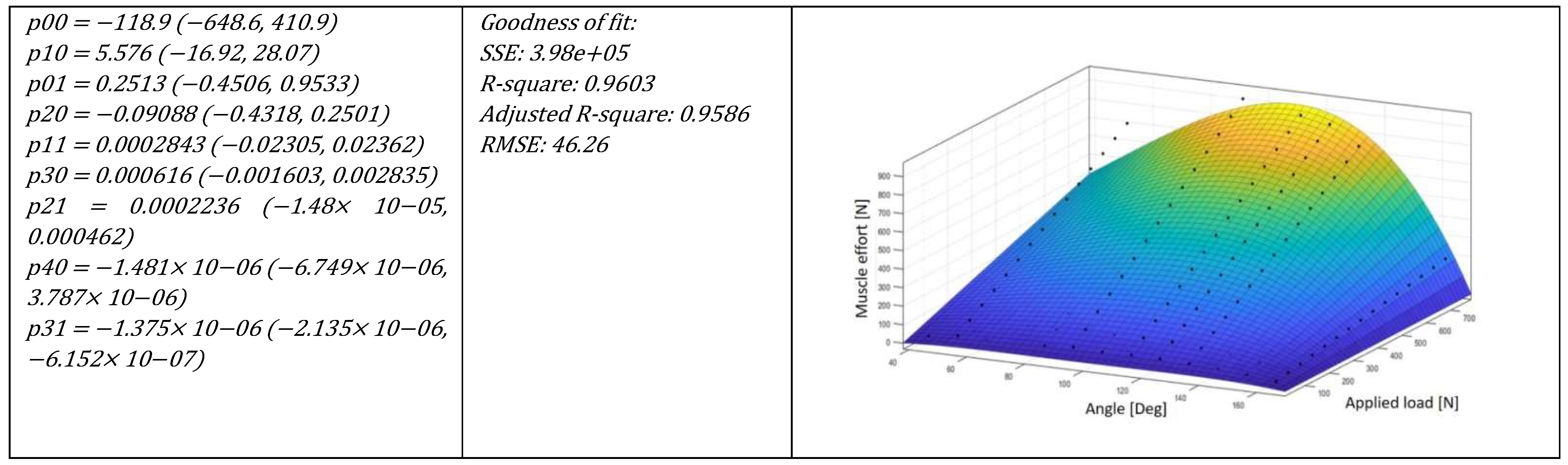
3.3. Mathematical Models for Muscle Efforts
3.3.1. Efforts for 150 N of Vertical Load
3.3.2. General Formulation
4. Discussion
- Studies have focused on one joint position, obtaining results related to muscle effort that are difficult to extrapolate to different positions. Ramírez [12] obtains the results for the anterior tibial muscle under study conditions, but moving the results to other load situations should be difficult to solve.
- The equations obtained to characterize the muscle are difficult to implement in a FEM model. Sachenkov et al. [29] use 1D elements to simulate muscles, but there is no single equation for any muscle to implement it in another analysis. The same happens with Alonso et al. [20], where the result is based on a static and physiological optimization that integrates the forces of any Hill MTU unit.
- Several of these studies use 3D elements to represent the muscle, which allows a better understanding of the internal behavior of the muscle itself (distribution of stresses and strains, deformations, etc.) but does not allow the created mesh to be reused in other positions of the joint. Therefore, Martínez [12] studies the anterior tibia muscle in a certain position, and if the muscle length changes, a new mesh should be developed. Another example is shown in research by Islan et al. [14], where they analyze the shoulder muscles of a violin player holding the instrument, and so, if the shoulder position changes, the mesh will do as well, remeshing the muscles into their new position.
- Long biceps: 477 N;
- Short biceps: 245 N.
- Long triceps: 438 N;
- Middle triceps: 231;
- Side triceps: 304.
5. Conclusions
- Validation of the theoretical model obtained through testing with individuals with whom it is possible to measure the forces in cases of biceps and/or triceps load that, by means of comparison with this study, allows for knowing its validity.
- Modification of the equations obtained in this study in order to obtain their evolution for concentric or eccentric contractions.
- Creation of a new type of 1D element for application in finite element models that allows the behavior of a muscle to be characterized according to the equations obtained for any type of contraction, isometric, concentric, or eccentric.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A













References
- Strouboulis, T.; Babuška, I.; Whiteman, J.R. The Finite Element Method and Its Reliability; Clarendon Press: Oxford, UK, 2001; ISBN 978-0-19-850276-0. [Google Scholar]
- Babuska, I.; Whiteman, J.; Strouboulis, T. Finite Elements: An Introduction to the Method and Error Estimation; OUP: Oxford, UK, 2010; ISBN 978-0-19-850669-0. [Google Scholar]
- Pawełko, P.; Jastrzębski, D.; Parus, A.; Jastrzębska, J. A new measurement system to determine stiffness distribution in machine tool workspace. Arch. Civ. Mech. Eng. 2021, 21, 49. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, S.; Wang, L.; Liu, Y. Developing a Ball Screw Drive System of High-Speed Machine Tool Considering Dynamics. IEEE Trans. Ind. Electron. 2021, 69, 4966–4976. [Google Scholar] [CrossRef]
- Li, Z.; Oger, G.; Le Touzé, D. A partitioned framework for coupling LBM and FEM through an implicit IBM allowing non-conforming time-steps: Application to fluid-structure interaction in biomechanics. J. Comput. Phys. 2021, 449, 110786. [Google Scholar] [CrossRef]
- Della Rosa, N.; Bertozzi, N.; Adani, R. Biomechanics of external fixator of distal radius fracture, a new approach: Mutifix Wrist. Musculoskelet. Surg. 2020, 106, 89–97. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.-Z.; Xiong, Q.-S.; Yao, J.; Liu, B.-L.; Zhang, M.; Cheng, C.-K. Biomechanical changes at the adjacent segments induced by a lordotic porous interbody fusion cage. Comput. Biol. Med. 2022, 143, 105320. [Google Scholar] [CrossRef] [PubMed]
- Denozière, G.; Ku, D.N. Biomechanical Comparison between Fusion of Two Vertebrae and Implantation of an Artificial Intervertebral Disc. J. Biomech. 2006, 39, 766–775. [Google Scholar] [CrossRef] [PubMed]
- Samani, A.; Bishop, J.; Yaffe, M.J.; Plewes, D.B. Biomechanical 3-D finite element modeling of the human breast using MRI data. IEEE Trans. Med. Imaging 2001, 20, 271–279. [Google Scholar] [CrossRef]
- Jaecques, S.; Van Oosterwyck, H.; Muraru, L.; Van Cleynenbreugel, T.; De Smet, E.; Wevers, M.; Naert, I.; Sloten, J.V. Individualised, micro CT-based finite element modelling as a tool for biomechanical analysis related to tissue engineering of bone. Biomaterials 2003, 25, 1683–1696. [Google Scholar] [CrossRef]
- Renner, S.M.; Natarajan, R.N.; Patwardhan, A.G.; Havey, R.M.; Voronov, L.I.; Guo, B.Y.; Andersson, G.B.; An, H.S. Novel model to analyze the effect of a large compressive follower pre-load on range of motions in a lumbar spine. J. Biomech. 2007, 40, 1326–1332. [Google Scholar] [CrossRef]
- Martínez, A.M.R. Modelado y simulación del tejido músculo-esquelético. Validación Experimental con el Músculo Tibial Anterior de Rata. Ph.D. Thesis, Universidad de Zaragoza, Zaragoza, Spain, 2011. Available online: http://purl.org/dc/dcmitype/Text. (accessed on 5 November 2021).
- Weiss, J.A.; Gardiner, J.C.; Ellis, B.J.; Lujan, T.J.; Phatak, N.S. Three-dimensional finite element modeling of ligaments: Technical aspects. Med. Eng. Phys. 2005, 27, 845–861. [Google Scholar] [CrossRef]
- Islan, M.; Carvajal, J.; Pedro, P.S.; D’Amato, R.; Juanes, J.A.; Soriano, E. Linear Approximation of the Behavior of the Rotator Cuff under Fatigue Conditions. Violinist Case Study. In Proceedings of the ACM 5th International Conference on Technological Ecosystems for Enhancing Multiculturality, Cádiz, Spain, 18–20 October 2017; p. 58. [Google Scholar]
- Sachenkov, O.A.; Hasanov, R.F.; Andreev, P.S.; Konoplev, Y.G. Numerical Study of Stress-Strain State of Pelvis at the Proximal Femur Rotation Osteotomy. Russ. J. Biomech. 2016, 20, 220–232. [Google Scholar] [CrossRef]
- Martins, J.A.C.; Pato, M.P.M.; Pires, E.B. A finite element model of skeletal muscles. Virtual Phys. Prototyp. 2006, 1, 159–170. [Google Scholar] [CrossRef]
- Tang, C.; Tsui, C.; Stojanovic, B.; Kojic, M. Finite element modelling of skeletal muscles coupled with fatigue. Int. J. Mech. Sci. 2007, 49, 1179–1191. [Google Scholar] [CrossRef]
- Syomin, F.A.; Tsaturyan, A.K. Mechanical model of the left ventricle of the heart approximated by axisymmetric geometry. Russ. J. Numer. Anal. Math. Model. 2017, 32, 327–337. [Google Scholar] [CrossRef]
- Perreault, E.J.; Sandercock, T.G.; Heckman, C.J. Hill Muscle Model Performance during Natural Activation and Electrical Stimulation. In Proceedings of the 23rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Istanbul, Turkey, 25–28 October 2001; Volume 2, pp. 1248–1251. [Google Scholar]
- Alonso, F.J.; Galán-Marín, G.; Salgado, D.R.; Pàmies Vilà, R.; Font Llagunes, J.M. Cálculo de Esfuerzos Musculares en la Marcha Humana Mediante Optimización Estática-Fisiológica. In Proceedings of the XVIII Congreso Nacional de Ingeniería Mecánica, Ciudad Real, Spain, 3–5 November 2010; pp. 1–9. [Google Scholar]
- Holzbaur, K.R.S.; Murray, W.M.; Delp, S.L. A Model of the Upper Extremity for Simulating Musculoskeletal Surgery and Analyzing Neuromuscular Control. Ann. Biomed. Eng. 2005, 33, 829–840. [Google Scholar] [CrossRef]
- Park, W.-I.; Lee, H.-D.; Kim, J. Estimation of isometric joint torque from muscle activation and length in intrinsic hand muscle. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 2489–2493. [Google Scholar] [CrossRef]
- Soechting, J.F.; Flanders, M. Evaluating an Integrated Musculoskeletal Model of the Human Arm. J. Biomech. Eng. 1997, 119, 93–102. [Google Scholar] [CrossRef]
- Zajac, F.E. Muscle and Tendon: Properties, Models, Scaling, and Application to Biomechanics and Motor Control. Crit. Rev. Biomed Eng. 1989, 17, 359–411. [Google Scholar]
- Lechosa Urquijo, E.; Blaya Haro, F.; D’Amato, R.; Juanes Méndez, J.A. Finite Element Model of an Elbow under Load, Muscle Effort Analysis When Modeled Using 1D Rod Element. In Proceedings of the Eighth International Conference on Technological Ecosystems for Enhancing Multiculturality, Salamanca, Spain, 21–23 October 2020; Association for Computing Machinery: New York, NY, USA, 21 October 2020; pp. 475–482. [Google Scholar]
- Teo, E.C.; Zhang, Q.H.; Qiu, T.X. Finite Element Analysis of Head-Neck Kinematics Under Rear-End Impact Conditions. In Proceedings of the 2006 International Conference on Biomedical and Pharmaceutical Engineering, Singapore, 11–14 December 2006; pp. 206–209. [Google Scholar]
- Donahue, T.L.H.; Hull, M.L.; Rashid, M.M.; Jacobs, C.R. A Finite Element Model of the Human Knee Joint for the Study of Tibio-Femoral Contact. J. Biomech. Eng. 2002, 124, 273–280. [Google Scholar] [CrossRef]
- Abidin, N.A.Z.; Kadir, M.R.A.; Ramlee, M.H. Three Dimensional Finite Element Modelling and Analysis of Human Knee Joint-Model Verification. J. Phys. Conf. Ser. 2019, 1372, 012068. [Google Scholar] [CrossRef]
- Sachenkov, O.A.; Hasanov, R.; Andreev, P.; Konoplev, Y. Determination of Muscle Effort at the Proximal Femur Rotation Osteotomy. IOP Conf. Series: Mater. Sci. Eng. 2016, 158, 012079. [Google Scholar] [CrossRef] [Green Version]
- Jesal, N. Parekh Using Finite Element Methods to Study Anterior Cruciate Ligament Injuries: Understanding the Role of ACL Modulus and Tibial Surface Geometry on ACL Loading. Ph.D. Thesis, The University of Michigan, Ann Arbor, MI, USA, 2013. [Google Scholar]
- CES EduPack Bulletin: January 2017. Available online: https://www.grantadesign.com/newsletters/ces-edupack-bulletin-ces-edupack-2017-new-products-database-symposia-deadlines-shared-resources-webinars-and-more/ (accessed on 20 June 2022).
- Bruno, S.; José, M.; Filomena, S.; Vítor, C.; Demétrio, M.; Karolina, B. The Conceptual Design of a Mechatronic System to Handle Bedridden Elderly Individuals. Sensors 2016, 16, 725. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arcila Arango, J.C.; Cardona Nieto, D.; Giraldo, J.C. Abordaje Físico-Matemático Del Gesto Articular. Available online: https://www.efdeportes.com/efd171/abordaje-fisico-matematico-del-gesto-articular.htm (accessed on 5 November 2021).
- Loss, J.F.; Candotti, C.T. Comparative Study between Two Elbow Flexion Exercises Using the Estimated Resultant Muscle Force. Braz. J. Phys. Ther. 2008, 12, 502–510. [Google Scholar] [CrossRef] [Green Version]
- Murray, W.M.; Delp, S.L.; Buchanan, T.S. Variation of Muscle Moment Arms with Elbow and Forearm Position. J. Biomech. 1995, 28, 513–525. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Young’s Modulus (Mpa) | Poisson | Density (kg/m3) | |
|---|---|---|---|
| Bone | 17,200 | 0.41 | 1790 |
| Cartilage | 8 | 0.49 | 1150 |
| Long Biceps | Short Biceps | Lateral Triceps | Medial Triceps | Long Triceps | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Elbow Angle (°) | Force (N) | Length (mm) | Force (N) | Length (mm) | Force (N) | Length (mm) | Force (N) | Length (mm) | Force (N) | Length (mm) |
| 44 | 244 | 373 | 96 | 310 | 148 | 217 | 70 | 211 | 269 | 284 |
| 54 | 330 | 375 | 136 | 312 | 128 | 216 | 144 | 209 | 312 | 282 |
| 64 | 341 | 383 | 152 | 320 | 212 | 215 | 115 | 208 | 340 | 281 |
| 74 | 341 | 391 | 161 | 328 | 208 | 215 | 119 | 208 | 347 | 281 |
| 84 | 340 | 399 | 168 | 336 | 235 | 214 | 150 | 207 | 340 | 280 |
| 94 | 333 | 407 | 170 | 344 | 263 | 214 | 186 | 207 | 347 | 279 |
| 104 | 302 | 415 | 181 | 351 | 233 | 213 | 164 | 207 | 331 | 279 |
| 114 | 301 | 422 | 159 | 359 | 233 | 213 | 176 | 206 | 307 | 278 |
| 124 | 274 | 429 | 143 | 365 | 213 | 211 | 170 | 204 | 271 | 276 |
| 134 | 261 | 435 | 95 | 371 | 177 | 207 | 150 | 201 | 226 | 273 |
| 144 | 185 | 439 | 87 | 375 | 131 | 203 | 120 | 197 | 175 | 269 |
| 154 | 121 | 442 | 46 | 379 | 79 | 199 | 82 | 192 | 119 | 264 |
| 164 | 52 | 445 | 1 | 381 | 24 | 194 | 40 | 188 | 58 | 260 |
| Muscle | a0 | a1 | a2 | a3 | a4 | a5 | a6 | SSE | R2 | RMSE |
|---|---|---|---|---|---|---|---|---|---|---|
| Long biceps | −2323 (−3730, −916.1) | 136.6 (55.39, 217.8) | −2.7 (−4.477, −0.9232) | 0.02579 (0.007278, 0.04431) | −0.0001193 (−0.0002116, −2.692 × 10−5) | 2.116 × 10−7 (3.433 × 10−8, 3.889 × 10−7) | 0 | 694.5 | 0.993 | 10.76 |
| Short biceps | −409 (−1729, 911.5) | 24.12 (−52.09, 100.3) | −0.4361 (−2.104, 1.232) | 0.004284 (−0.01309, 0.02166) | −2.182 × 10−5 (−0.0001085, 6.486 × 10−5) | 4.28 × 10−8 (−1.236 × 10−7, 2.092 × 10−7) | 0 | 367.3 | 0.982 | 7.82 |
| Long Triceps | −1550 (−3477, 377.3) | 110.4 (−23.88, 244.7) | −2.702 (−6.433, 1.028) | 0.03508 (−0.01795, 0.0881) | −0.0002503 (−0.0006584, 0.0001577) | 9.18 × 10−7 (−7 × 10−7, 2.536 × 10−6) | −1.354 × 10−9 (−3.945 × 10−9, 1.236 × 10−9) | 102.3 | 0.999 | 4.13 |
| Medium Triceps | −6448 (−1.38 × 104, 908.4) | 442 (−70.71, 954.7) | −11.9 (−26.14, 2.344) | 0.1638 (−0.0386, 0.3662) | −0.001217 (−0.002775, 0.0003408) | 4.643 × 10−6 (−1.534 × 10−6, 1.082 × 10−5) | −7.144 × 10−9 (−1.703 × 10−8, 2.743 × 10−9) | 1491 | 0.936 | 15.76 |
| Lateral Triceps | 4661 (−3110, 1.243 × 104) | −311.3 (−852.8, 230.3) | 8.397 (−6.645, 23.44) | −0.1143 (−0.3281, 0.09946) | 0.0008424 (−0.0008029, 0.002488) | −3.214 × 10−6 (−9.738 × 10−6, 3.309 × 10−6) | 4.975 × 10−9 (−5.468 × 10−9, 1.542 × 10−8) | 1664 | 0.972 | 16.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lechosa Urquijo, E.; Blaya Haro, F.; Cano-Moreno, J.D.; D’Amato, R.; Juanes Méndez, J.A. Mechanical Model and FEM Simulations for Efforts on Biceps and Triceps Muscles under Vertical Load: Mathematical Formulation of Results. Mathematics 2022, 10, 2441. https://doi.org/10.3390/math10142441
Lechosa Urquijo E, Blaya Haro F, Cano-Moreno JD, D’Amato R, Juanes Méndez JA. Mechanical Model and FEM Simulations for Efforts on Biceps and Triceps Muscles under Vertical Load: Mathematical Formulation of Results. Mathematics. 2022; 10(14):2441. https://doi.org/10.3390/math10142441
Chicago/Turabian StyleLechosa Urquijo, Emilio, Fernando Blaya Haro, Juan David Cano-Moreno, Roberto D’Amato, and Juan Antonio Juanes Méndez. 2022. "Mechanical Model and FEM Simulations for Efforts on Biceps and Triceps Muscles under Vertical Load: Mathematical Formulation of Results" Mathematics 10, no. 14: 2441. https://doi.org/10.3390/math10142441
APA StyleLechosa Urquijo, E., Blaya Haro, F., Cano-Moreno, J. D., D’Amato, R., & Juanes Méndez, J. A. (2022). Mechanical Model and FEM Simulations for Efforts on Biceps and Triceps Muscles under Vertical Load: Mathematical Formulation of Results. Mathematics, 10(14), 2441. https://doi.org/10.3390/math10142441