
Survey of Lévy Flight-Based Metaheuristics for Optimization



Abstract
:1. Introduction
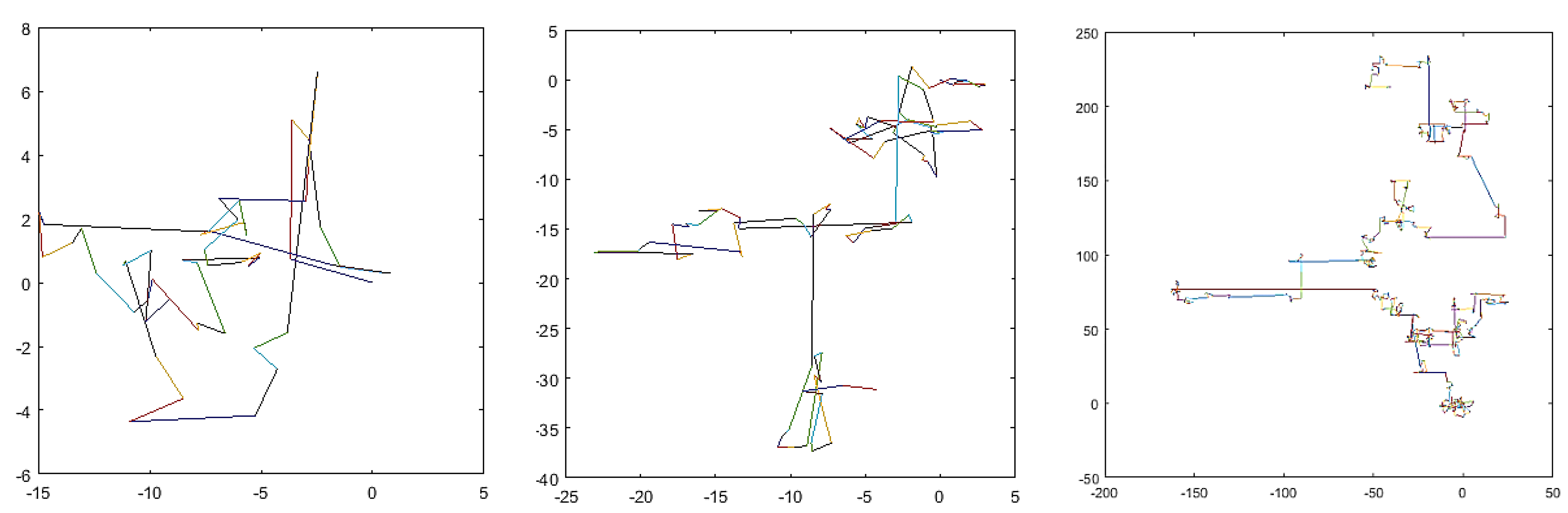
2. Lévy Flight
2.1. Lévy Flight-Based Metaheuristic Algorithms Research Studies
2.2. Lévy Flight
- Self-similarity and random fractal;
- Power law progressive, namely ‘heavy-tailed’;
- Infinite mean and infinite variance;
- Lévy flight with the generalized central limit theorem, attraction will occur when the evolutionary result is determined by the sum of a large number of random numbers.
3. Classification of Lévy Flight Used in Intelligent Optimization Algorithms
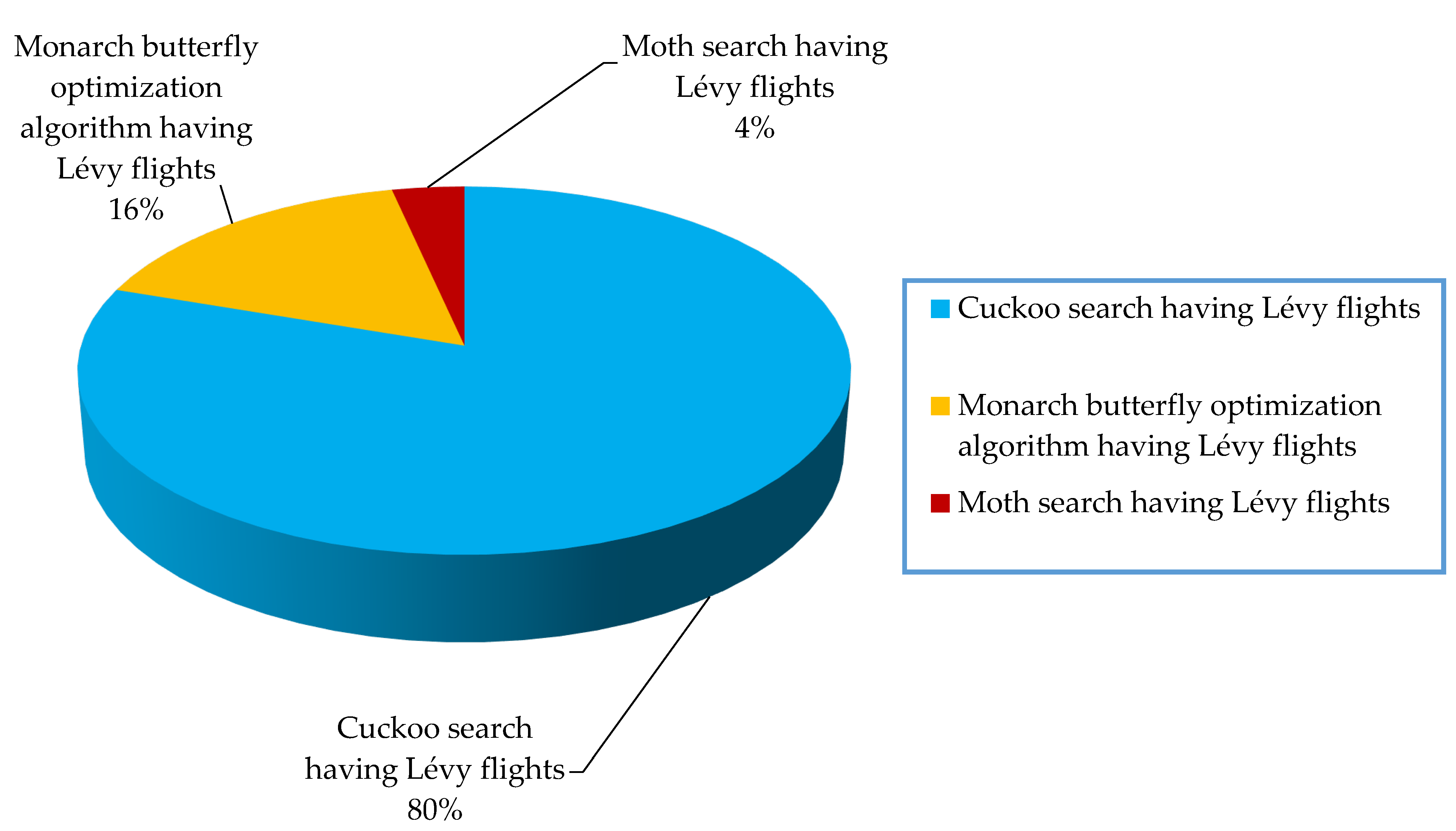
3.1. Metaheuristic Algorithms Having Lévy Flight Operator
3.1.1. Cuckoo Search Having Lévy Flight
3.1.2. Monarch Butterfly Optimization Having Lévy Flight
3.1.3. Moth Search Having Lévy Flight
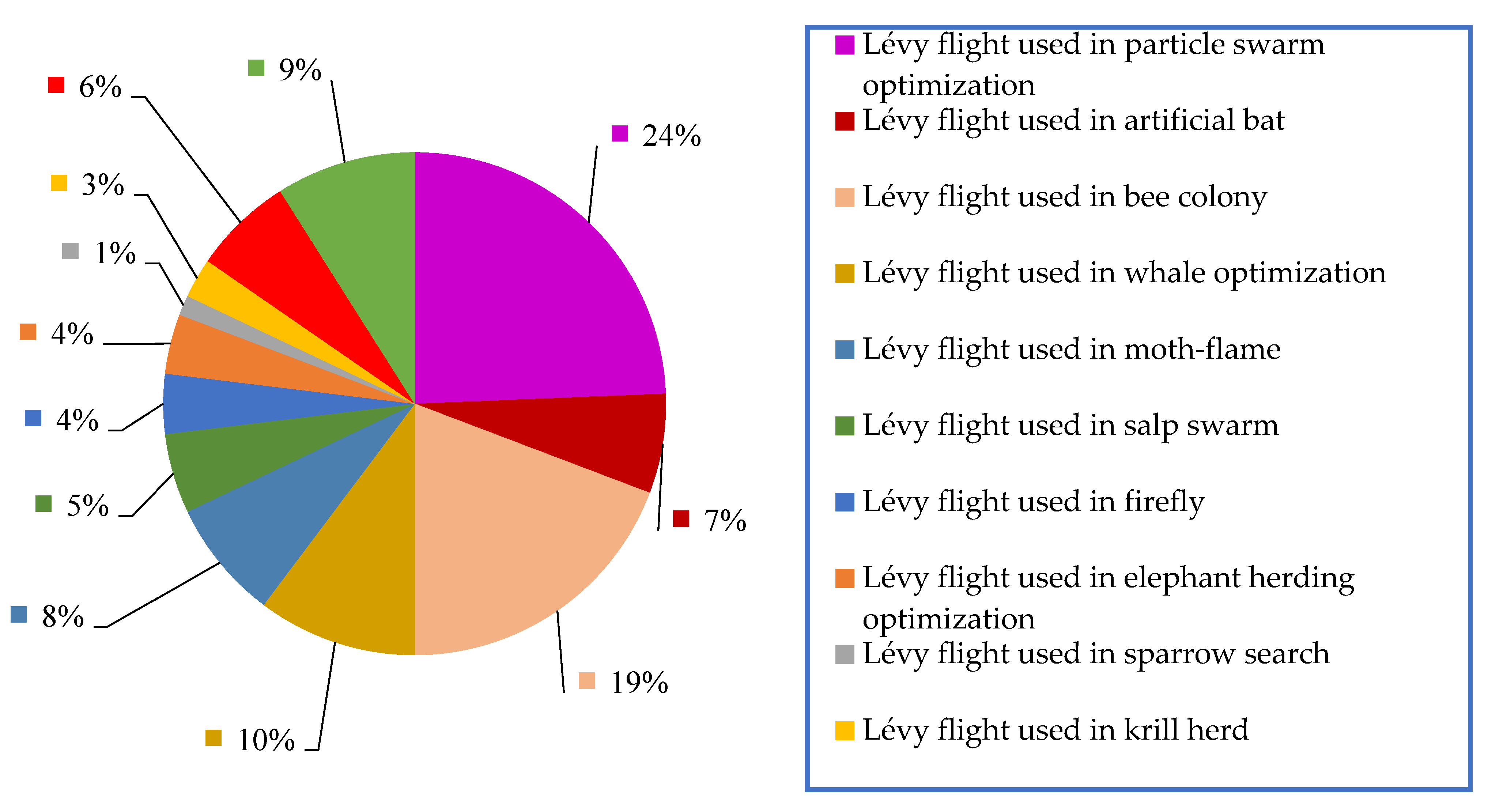
3.2. Lévy Flight Used in Swarm Intelligence
3.2.1. Lévy flight Used in Particle Swarm Optimization Algorithm
3.2.2. Lévy Flight Used in Bat Algorithm
3.2.3. Lévy Flight Used in Artificial Bee Colony
3.2.4. Lévy Flight Used in Whale Optimization Algorithm
3.2.5. Lévy Flight Used in Moth–Flame Algorithm
3.2.6. Lévy Flight Used in Salp Swarm Algorithm
3.2.7. Lévy Flight Used in Firefly Algorithm
3.2.8. Lévy Flight Used in Elephant Herding Optimization Algorithm
3.2.9. Lévy Flight Used in Sparrow Search Algorithm
3.2.10. Lévy Flight Used in Krill Herd Algorithm
3.2.11. Lévy Flight Used in Grey Wolf Optimization Algorithm
3.2.12. Lévy Flight Used in Ant Colony Optimization Algorithm
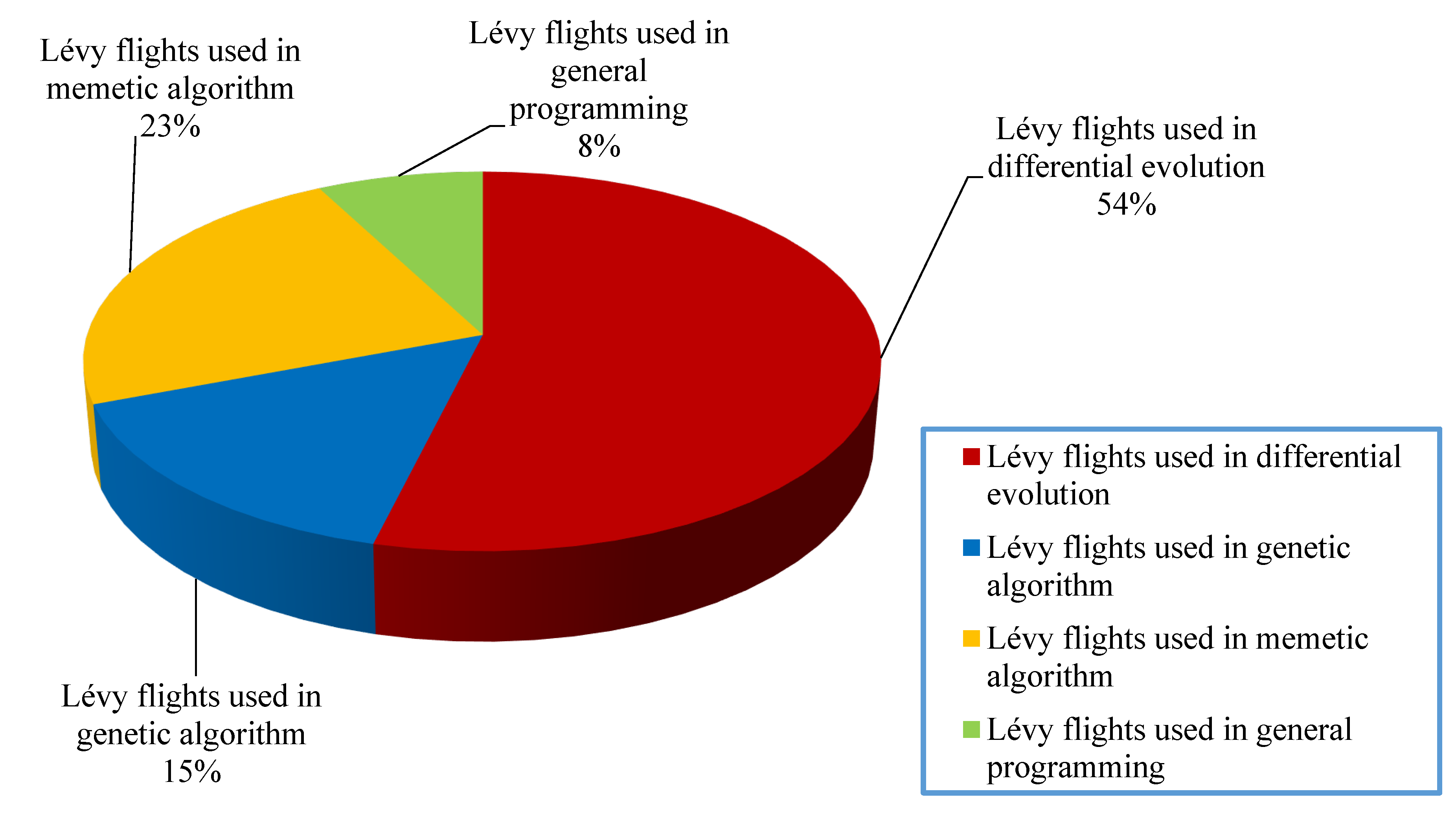
3.3. Lévy Flight Used in Evolutionary Computation
3.3.1. Lévy Flight Used in Differential Evolution
3.3.2. Lévy Flight Used in Genetic Algorithm
3.3.3. Lévy Flight Used in Memetic Algorithm
3.3.4. Lévy Flight Used in General Programming
3.4. Lévy flight Used in Neural Network
4. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, Z.; Fang, H.; Li, Q.; Li, Z.; Zhang, T.; Sang, N.; Li, Y. Optical remote sensing image enhancement with weak structure preservation via spatially adaptive gamma correction. Infrared Phys. Technol. 2018, 94, 38–47. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, L.; Zhang, Y.; Yu, Z.; Fang, H.; Zhang, T. Robust contact-point detection from pantograph-catenary infrared images by employing horizontal-vertical enhancement operator. Infrared Phys. Technol. 2019, 101, 146–155. [Google Scholar] [CrossRef]
- Wang, G.-G.; Tan, Y. Improving metaheuristic algorithms with information feedback models. IEEE Trans. Cybern. 2019, 49, 542–555. [Google Scholar] [CrossRef] [PubMed]
- Panteleev, A.V.; Kolessa, A.A. Optimal open-loop control of discrete deterministic systems by application of the perch school metaheuristic optimization algorithm. Algorithms 2022, 15, 157. [Google Scholar] [CrossRef]
- Wang, L.; Pan, Z.; Wang, J. A review of reinforcement learning based intelligent optimization for manufacturing scheduling. Complex Syst. Modeling Simul. 2021, 1, 257–270. [Google Scholar] [CrossRef]
- Gao, D.; Wang, G.-G.; Pedrycz, W. Solving fuzzy job-shop scheduling problem using de algorithm improved by a selection mechanism. IEEE Trans. Fuzzy Syst. 2020, 28, 3265–3275. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; El-Sehiemy, R.A.; Wang, G.-G. A novel parallel hurricane optimization algorithm for secure emission/economic load dispatch solution. Appl. Soft Comput. 2018, 63, 206–222. [Google Scholar] [CrossRef]
- Liu, G.; Deng, M. Parametric active contour based on sparse decomposition for multi-objects extraction. Signal Process. 2018, 148, 314–321. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Li, Z.; Zhang, T.; Sang, N.; Xiong, S. Unidirectional variation and deep cnn denoiser priors for simultaneously destriping and denoising optical remote sensing images. Int. J. Remote Sens. 2019, 40, 5737–5748. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Li, X.; Zhang, T.; Sang, N.; Hong, H. Joint analysis and weighted synthesis sparsity priors for simultaneous denoising and destriping optical remote sensing images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6958–6982. [Google Scholar] [CrossRef]
- Huang, Z.; Zhu, Z.; An, Q.; Wang, Z.; Zhou, Q.; Zhang, T.; Alshomrani, A.S. Luminance learning for remotely sensed image enhancement guided by weighted least squares. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, Z.; Zhu, Z.; Zhang, Y.; Fang, H.; Shi, Y.; Zhang, T. Dlrp: Learning deep low-rank prior for remotely sensed image denoising. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Alweshah, M. Solving feature selection problems by combining mutation and crossover operations with the monarch butterfly optimization algorithm. Appl. Intell. 2021, 51, 4058–4081. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, X.-F.; Gong, D.-W. A return-cost-based binary firefly algorithm for feature selection. Inf. Sci. 2017, 418–419, 561–574. [Google Scholar] [CrossRef]
- Li, J.; Yang, Y.-H.; Lei, H.; Wang, G.-G. Solving logistics distribution center location with improved cuckoo search algorithm. Int. J. Comput. Intell. Syst. 2020, 14, 676–692. [Google Scholar] [CrossRef]
- Li, J.; Xiao, D.-d.; Lei, H.; Zhang, T.; Tian, T. Using cuckoo search algorithm with Q-learning and genetic operation to solve the problem of logistics distribution center location. Mathematics 2020, 8, 149. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Huang, L.; Li, Q.; Zhang, T.; Sang, N. Framelet regularization for uneven intensity correction of color images with illumination and reflectance estimation. Neurocomputing 2018, 314, 154–168. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Q.; Zhang, T.; Sang, N.; Hong, H. Iterative weighted sparse representation for x-ray cardiovascular angiogram image denoising over learned dictionary. IET Image Process. 2018, 12, 254–261. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Zhang, T.; Sang, N.; Hong, H. Progressive dual-domain filter for enhancing and denoising optical remote-sensing images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 759–763. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Zhang, T.; Sang, N. Spatially adaptive denoising for x-ray cardiovascular angiogram images. Biomed. Signal Process. Control 2018, 40, 131–139. [Google Scholar] [CrossRef]
- An, Q.; Xi, J.; Jun, Q.; Rui, Z.; Yuan, J.; Wei, H. A robust fire detection model via convolution neural networks for intelligent robot vision sensing. Sensors 2022, 22, 2929. [Google Scholar] [CrossRef]
- Alweshah, M.; Abdullah, S. Hybridizing firefly algorithms with a probabilistic neural network for solving classification problems. Appl. Soft Comput. 2015, 35, 513–524. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; El-Sehiemy, R.A.; Deb, S.; Wang, G.-G. A novel fruit fly framework for multi-objective shape design of tubular linear synchronous motor. J. Supercomput. 2017, 73, 1235–1256. [Google Scholar] [CrossRef]
- Liu, G.; Zou, J. Level set evolution with sparsity constraint for object extraction. IET Image Process. 2018, 12, 1413–1422. [Google Scholar] [CrossRef]
- Bousmaha, R.; Hamou, R.M.; Amine, A. Automatic selection of hidden neurons and weights in neural networks for data classification using hybrid particle swarm optimization, multi-verse optimization based on Lévy flight. Evol. Intell. 2021, 15, 1675–1714. [Google Scholar] [CrossRef]
- Prabu, M.; Chelliah, B.J. Mango leaf disease identification and classification using a cnn architecture optimized by crossover-based levy flight distribution algorithm. Neural Comput. Appl. 2022, 34, 7311–7324. [Google Scholar] [CrossRef]
- Cui, Z.; Sun, B.; Wang, G.-G.; Xue, Y.; Chen, J. A novel oriented cuckoo search algorithm to improve dv-hop performance for cyber-physical systems. J. Parallel Distrib. Comput. 2017, 103, 42–52. [Google Scholar] [CrossRef]
- Banerjee, R.; De, S.; Dey, S. Wtaof-ilpb based feature learning and lfssoa-rbfnn based classification for facial micro-expression recognition. Wirel. Pers. Commun. 2021. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.-x.; Tian, S.-s.; Xia, J.-l. An improved cuckoo search algorithm with self-adaptive knowledge learning. Neural Comput. Appl. 2020, 32, 11967–11997. [Google Scholar] [CrossRef]
- Minocha, S.; Singh, B. A novel equilibrium optimizer based on Lévy flight and iterative cosine operator for engineering optimization problems. Expert Syst. 2022, 39, 12843. [Google Scholar] [CrossRef]
- Nautiyal, B.; Prakash, R.; Vimal, V.; Liang, G.; Chen, H. Improved salp swarm algorithm with mutation schemes for solving global optimization and engineering problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Tsipianitis, A.; Tsompanakis, Y. Improved cuckoo search algorithmic variants for constrained nonlinear optimization. Adv. Eng. Softw. 2020, 149, 102865. [Google Scholar] [CrossRef]
- Wang, G.-G.; Cai, X.; Cui, Z.; Min, G.; Chen, J. High performance computing for cyber physical social systems by using evolutionary multi-objective optimization algorithm. IEEE Trans. Emerg. Top. Comput. 2020, 8, 20–30. [Google Scholar] [CrossRef]
- Cai, X.; Geng, S.; Zhang, J.; Wu, D.; Cui, Z.; Zhang, W.; Chen, J. A sharding scheme-based many-objective optimization algorithm for enhancing security in blockchain-enabled industrial internet of things. IEEE Trans. Ind. Inform. 2021, 17, 7650–7658. [Google Scholar] [CrossRef]
- Cai, X.; Lan, Y.; Zhang, Z.; Wen, J.; Cui, Z.; Zhang, W.S. A many-objective optimization based federal deep generation model for enhancing data processing capability in iot. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, Z.; Hu, Z.; Geng, S.; Chen, J. A many-objective optimization based intelligent high performance data processing model for cyber-physical-social systems. IEEE Trans. Netw. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- Cui, Z.; Zhao, P.; Hu, Z.; Cai, X.; Zhang, W.; Chen, J. An improved matrix factorization based model for many-objective optimization recommendation. Inf. Sci. 2021, 579, 1–14. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.-G. Binary moth search algorithm for discounted {0-1} knapsack problem. IEEE Access 2018, 6, 10708–10719. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.-G.; Wang, L. Solving randomized time-varying knapsack problems by a novel global firefly algorithm. Eng. Comput. 2018, 34, 621–635. [Google Scholar] [CrossRef]
- Aghaee, R.; Momeni, M.; Moallem, P. Semisupervised band selection from hyperspectral images using levy flight-based genetic algorithm. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley: New York, NY, USA, 1998. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Wang, G.-G.; Gandomi, A.H.; Yang, X.-S.; Alavi, A.H. A novel improved accelerated particle swarm optimization algorithm for global numerical optimization. Eng. Comput. 2014, 31, 1198–1220. [Google Scholar] [CrossRef]
- Sun, J.; Feng, B.; Xu, W. Particle swarm optimization with particles having quantum behavior. In Proceedings of the Congress on Evolutionary Computation (CEC 2004), Portland, OR, USA, 19–23 June 2004; pp. 325–331. [Google Scholar]
- Adewumi, A.O.; Arasomwan, M.A. On the performance of particle swarm optimisation with(out) some control parameters for global optimisation. Int. J. Bio-Inspired Comput. 2016, 8, 14–32. [Google Scholar] [CrossRef]
- Lu, X.-l.; He, G. Qpso algorithm based on Lévy flight and its application in fuzzy portfolio. Appl. Soft Comput. 2021, 99, 106894. [Google Scholar] [CrossRef]
- Bejarbaneh, E.Y.; Masoumnezhad, M.; Armaghani, D.J.; Binh Thai, P. Design of robust control based on linear matrix inequality and a novel hybrid pso search technique for autonomous underwater vehicle. Appl. Ocean Res. 2020, 101, 102231. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Xu, Z.; Unveren, A.; Acan, A. Probability collectives hybridised with differential evolution for global optimisation. Int. J. Bio-Inspired Comput. 2016, 8, 133–153. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Duan, H.; Liu, L.; Wang, H.; Shao, M. Path planning for uninhabited combat aerial vehicle using hybrid meta-heuristic de/bbo algorithm. Adv. Sci. Eng. Med. 2012, 4, 550–564. [Google Scholar] [CrossRef]
- Feng, X.; Muramatsu, H.; Katsura, S. Differential evolutionary algorithm with local search for the adaptive periodic-disturbance observer adjustment. IEEE Trans. Ind. Electron. 2021, 68, 12504–12512. [Google Scholar] [CrossRef]
- Zhong, X.; Cheng, P. An elite-guided hierarchical differential evolution algorithm. Appl. Intell. 2021, 51, 4962–4983. [Google Scholar] [CrossRef]
- Ates, A.; Akpamukcu, M. Modified monarch butterfly optimization with distribution functions and its application for 3 dof hover flight system. Neural Comput. Appl. 2022, 34, 3697–3722. [Google Scholar] [CrossRef]
- Kim, M.; Chae, J. Monarch butterfly optimization for facility layout design based on a single loop material handling path. Mathematics 2019, 7, 154. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.-G.; Deb, S.; Cui, Z. Monarch butterfly optimization. Neural Comput. Appl. 2019, 31, 1995–2014. [Google Scholar] [CrossRef] [Green Version]
- Yi, J.-H.; Lu, M.; Zhao, X.-J. Quantum inspired monarch butterfly optimization for ucav path planning navigation problem. Int. J. Bio-Inspired Comput. 2020, 15, 75–89. [Google Scholar] [CrossRef]
- Yonar, A.; Yapici Pehlivan, N. Artificial bee colony with Lévy flights for parameter estimation of 3-p weibull distribution. Iran. J. Sci. Technol. Trans. A Sci. 2020, 44, 851–864. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, X. A hybrid approach combining modified artificial bee colony and cuckoo search algorithms for multi-objective cloud manufacturing service composition. Int. J. Prod. Res. 2017, 55, 4765–4784. [Google Scholar] [CrossRef]
- Wang, G.-G.; Deb, S.; Coelho, L.d.S. Elephant herding optimization. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI 2015), Bali, Indonesia, 7–9 December 2015; pp. 1–5. [Google Scholar]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Duan, H.; Wang, H.; Liu, L.; Shao, M. Hybridizing harmony search with biogeography based optimization for global numerical optimization. J. Comput. Theor. Nanosci. 2013, 10, 2318–2328. [Google Scholar] [CrossRef]
- Niknam, T.; Fard, A.K. Optimal energy management of smart renewable micro-grids in the reconfigurable systems using adaptive harmony search algorithm. Int. J. Bio-Inspired Comput. 2016, 8, 184–194. [Google Scholar] [CrossRef]
- Rezoug, A.; Boughaci, D. A self-adaptive harmony search combined with a stochastic local search for the 0–1 multidimensional knapsack problem. Int. J. Bio-Inspired Comput. 2016, 8, 234–239. [Google Scholar] [CrossRef]
- Dorigo, M.; Stutzle, T. Ant Colony Optimization; MIT Press: Cambridge, UK, 2004. [Google Scholar]
- Li, X.; Wang, J.; Yin, M. Enhancing the performance of cuckoo search algorithm using orthogonal learning method. Neural Comput. Appl. 2013, 24, 1233–1247. [Google Scholar] [CrossRef]
- Li, X.; Yin, M. Modified cuckoo search algorithm with self adaptive parameter method. Inf. Sci. 2015, 298, 80–97. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.-x.; Tian, S.-s.; Zou, J. Dynamic cuckoo search algorithm based on taguchi opposition-based search. Int. J. Bio-Inspired Comput. 2019, 13, 59–69. [Google Scholar] [CrossRef]
- Li, J.; Xiao, D.-d.; Zhang, T.; Liu, C.; Li, Y.-x.; Wang, G.-g. Multi-swarm cuckoo search algorithm with Q-learning model. Comput. J. 2021, 64, 108–131. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Li, Z.-Y.; Yi, J.-H.; Wang, G.-G. A new swarm intelligence approach for clustering based on krill herd with elitism strategy. Algorithms 2015, 8, 951–964. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gandomi, A.H.; Alavi, A.H.; Deb, S. A multi-stage krill herd algorithm for global numerical optimization. Int. J. Artif. Intell. Tools 2016, 25, 1550030. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gandomi, A.H.; Alavi, A.H. An effective krill herd algorithm with migration operator in biogeography-based optimization. Appl. Math. Model. 2014, 38, 2454–2462. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gandomi, A.H.; Alavi, A.H.; Gong, D. A comprehensive review of krill herd algorithm: Variants, hybrids and applications. Artif. Intell. Rev. 2019, 51, 119–148. [Google Scholar] [CrossRef]
- Wang, G.-G.; Deb, S.; Coelho, L.d.S. Earthworm optimization algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Int. J. Bio-Inspired Comput. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Peng, L.; Zhang, D. An adaptive Lévy flight firefly algorithm for multilevel image thresholding based on Rényi entropy. J. Supercomput. 2022, 78, 6875–6896. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.-G.; Burrage, K.; Tian, Y.-C.; Lawson, B.; Ding, Z. An improved firefly algorithm for global continuous optimization problems. Expert Syst. Appl. 2020, 149, 113340. [Google Scholar] [CrossRef]
- Santucci, V.; Baioletti, M.; Di Bari, G. An improved memetic algebraic differential evolution for solving the multidimensional two-way number partitioning problem. Expert Syst. Appl. 2021, 178, 114938. [Google Scholar] [CrossRef]
- Tang, D.; Liu, Z.; Yang, J.; Zhao, J. Memetic frog leaping algorithm for global optimization. Soft Comput. 2018, 23, 11077–11105. [Google Scholar] [CrossRef]
- Abu Khurmaa, R.; Aljarah, I.; Sharieh, A. An intelligent feature selection approach based on moth flame optimization for medical diagnosis. Neural Comput. Appl. 2021, 33, 7165–7204. [Google Scholar] [CrossRef]
- Liu, L.; Wang, A.; Sun, G.; Zheng, T.; Yu, C. An improved biogeography-based optimization approach for beam pattern optimizations of linear and circular antenna arrays. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 34, e2910. [Google Scholar] [CrossRef]
- Shirani, M.R.; Safi-Esfahani, F. Bmda: Applying biogeography-based optimization algorithm and mexican hat wavelet to improve dragonfly algorithm. Soft Comput. 2020, 24, 15979–16004. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Karimian, H.; Xiao, G.; Huang, J. A novel framework for prediction of dam deformation based on extreme learning machine and Lévy flight bat algorithm. J. Hydroinform. 2021, 23, 935–949. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, F.; Liu, C.; Cheng, L.; Mao, Y. An improved wolf pack algorithm for optimization problems: Design and evaluation. PLoS ONE 2021, 16, e0254239. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with Lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Chawla, M.; Duhan, M. Lévy flights in metaheuristics optimization algorithms—A review. Appl. Artif. Intell. 2018, 32, 802–821. [Google Scholar] [CrossRef]
- Zhou, Y.Q.; Ling, Y.; Luo, Q.F. Lévy flight trajectory-based whale optimization algorithm for engineering optimization. Eng. Comput. 2018, 35, 2406–2428. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S. Cuckoo search via Lévy flights. In Proceeding of the World Congress on Nature & Biologically Inspired Computing (NaBIC 2009), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.S.; Deb, S. Engineering optimisation by cuckoo search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S. Cuckoo search: Recent advances and applications. Neural Comput. Appl. 2013, 24, 169–174. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.-S.; Deb, S. Multiobjective cuckoo search for design optimization. Comput. Oper. Res. 2013, 40, 1616–1624. [Google Scholar] [CrossRef]
- Yang, B.; Miao, J.; Fan, Z.; Long, J.; Liu, X. Modified cuckoo search algorithm for the optimal placement of actuators problem. Appl. Soft Comput. 2018, 67, 48–60. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S.; Mishra, S.K. Multi-species cuckoo search algorithm for global optimization. Cogn. Comput. 2018, 10, 1085–1095. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.; Lin, C.; Zhou, M. A knowledge-based cuckoo search algorithm to schedule a flexible job shop with sequencing flexibility. IEEE Trans. Autom. Sci. Eng. 2021, 18, 56–69. [Google Scholar] [CrossRef]
- Cao, Z.; Lin, C.; Zhou, M.; Huang, R. Scheduling semiconductor testing facility by using cuckoo search algorithm with reinforcement learning and surrogate modeling. IEEE Trans. Autom. Sci. Eng. 2019, 16, 825–837. [Google Scholar] [CrossRef]
- Kim, M.; Chae, J. A monarch butterfly optimization for an unequal area facility layout problem. Soft Comput. 2021, 25, 14933–14953. [Google Scholar] [CrossRef]
- Kumar, V.; Naresh, R. Monarch butterfly optimization-based computational methodology for unit commitment problem. Electr. Power Compon. Syst. 2021, 48, 2181–2194. [Google Scholar] [CrossRef]
- Wang, G.-G. Moth search algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Memetic Comput. 2018, 10, 151–164. [Google Scholar] [CrossRef]
- Sun, S.; Su, Y.; Yin, C.; Jermsittiparsert, K. Optimal parameters estimation of pemfcs model using converged moth search algorithm. Energy Rep. 2020, 6, 1501–1509. [Google Scholar] [CrossRef]
- Strumberger, I.; Tuba, E.; Bacanin, N.; Beko, M.; Tuba, M. Wireless sensor network localization problem by hybridized moth search algorithm. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 316–321. [Google Scholar]
- Strumberger, I.; Sarac, M.; Markovic, D.; Bacanin, N. Moth search algorithm for drone placement problem. Int. J. Comput. 2018, 3, 75–80. [Google Scholar]
- Strumberger, I.; Bacanin, N. Modified moth search algorithm for global optimization problems. Int. J. Comput. 2018, 3, 44–48. [Google Scholar]
- Starnberger, I.; Tuba, E.; Bacanin, N.; Beko, M.; Tuba, M. Hybridized moth search algorithm for constrained optimization problems. In Proceedings of the 2018 International Young Engineers Forum (YEF-ECE), Costa da Caparica, Portugal, 4 May 2018; pp. 1–5. [Google Scholar]
- Singh, P.; Bishnoi, S.K.; Meena, N.K. Moth search optimization for optimal ders integration in conjunction to oltc tap operations in distribution systems. IEEE Syst. J. 2020, 14, 880–888. [Google Scholar] [CrossRef] [Green Version]
- Singaravel, G.; Gokuldhev, M. Local pollination-based moth search algorithm for task-scheduling heterogeneous cloud environment. Comput. J. 2020, 62, 382–395. [Google Scholar]
- Hussein, A.M.; Abd Elaziz, M.; Abdel Wahed, M.S.M.; Sillanpää, M. A new approach to predict the missing values of algae during water quality monitoring programs based on a hybrid moth search algorithm and the random vector functional link network. J. Hydrol. 2019, 575, 852–863. [Google Scholar] [CrossRef]
- Han, X.; Yue, L.; Dong, Y.; Xu, Q.; Xie, G.; Xu, X. Efficient hybrid algorithm based on moth search and fireworks algorithm for solving numerical and constrained engineering optimization problems. J. Supercomput. 2020, 76, 9404–9429. [Google Scholar] [CrossRef]
- Feng, Y.; Yi, J.-H.; Wang, G.-G. Enhanced moth search algorithm for the set-union knapsack problems. IEEE Access 2019, 7, 173774–173785. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.-G. A binary moth search algorithm based on self-learning for the multidimensional knapsack problems. Future Gener. Comput. Syst. 2021, 126, 48–64. [Google Scholar] [CrossRef]
- Feng, Y.; An, H.; Gao, X. The importance of transfer function in solving set-union knapsack problem based on discrete moth search algorithm. Mathematics 2019, 7, 17. [Google Scholar] [CrossRef] [Green Version]
- Fathy, A.; Elaziz, M.A.; Sayed, E.T.; Olabi, A.G.; Rezk, H. Optimal parameter identification of triple-junction photovoltaic panel based on enhanced moth search algorithm. Energy 2019, 188, 116025. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Xiong, S.; Jayasena, K.P.N.; Li, L. Task scheduling in cloud computing based on hybrid moth search algorithm and differential evolution. Knowl.-Based Syst. 2019, 169, 39–52. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Talatahari, S.; Yang, X.-S.; Deb, S. Design optimization of truss structures using cuckoo search algorithm. Struct. Des. Tall Spec. Build. 2013, 22, 1330–1349. [Google Scholar] [CrossRef]
- Majumder, A.; Laha, D.; Suganthan, P.N. A hybrid cuckoo search algorithm in parallel batch processing machines with unequal job ready times. Comput. Ind. Eng. 2018, 124, 65–76. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Maurya, S. Cuckoo search algorithm-based brightness preserving histogram scheme for low-contrast image enhancement. Soft Comput. 2019, 24, 1619–1645. [Google Scholar] [CrossRef]
- Jha, V.V.; Jajoo, K.S.; Tripathy, B.K.; Saleem Durai, M.A. An improved monarch butterfly optimization based multivariate fuzzy time series approach for forecasting gdp of india. Evol. Intell. 2022. [Google Scholar] [CrossRef]
- Nandhini, S.; Ashokkumar, K. Improved crossover based monarch butterfly optimization for tomato leaf disease classification using convolutional neural network. Multimed. Tools Appl. 2021, 80, 18583–18610. [Google Scholar] [CrossRef]
- Masoudi, B.; Aghdasi, H.S. An image segmentation method based on improved monarch butterfly optimization. Iran J. Comput. Sci. 2021, 5, 41–54. [Google Scholar] [CrossRef]
- Feng, Y.; Deb, S.; Wang, G.-G.; Alavi, A.H. Monarch butterfly optimization: A comprehensive review. Expert Syst. Appl. 2021, 168, 114418. [Google Scholar] [CrossRef]
- Dorgham, O.M.; Alweshah, M.; Ryalat, M.H.; Alshaer, J.; Khader, M.; Alkhalaileh, S. Monarch butterfly optimization algorithm for computed tomography image segmentation. Multimed. Tools Appl. 2021, 80, 30057–30090. [Google Scholar] [CrossRef]
- Bai, G.M.; Venkadesh, P. Taylor–monarch butterfly optimization-based support vector machine for acute lymphoblastic leukemia classification with blood smear microscopic images. J. Mech. Med. Biol. 2021, 21, 2150041. [Google Scholar] [CrossRef]
- Liu, X.; Wang, G.-G.; Wang, L. Lsfqpso: Quantum particle swarm optimization with optimal guided Lévy flight and straight flight for solving optimization problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Haklı, H.; Uğuz, H. A novel particle swarm optimization algorithm with Lévy flight. Appl. Soft Comput. 2014, 23, 333–345. [Google Scholar] [CrossRef]
- Jensi, R.; Jiji, G.W. An enhanced particle swarm optimization with Lévy flight for global optimization. Appl. Soft Comput. 2016, 43, 248–261. [Google Scholar] [CrossRef]
- Chegini, S.N.; Bagheri, A.; Najafi, F. Psoscalf: A new hybrid pso based on sine cosine algorithm and Lévy flight for solving optimization problems. Appl. Soft Comput. 2018, 73, 697–726. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, J.; Hu, Q.; Shao, L.; Chen, T. A hybrid dpso with Lévy flight for scheduling mimo radar tasks. Appl. Soft Comput. 2018, 71, 242–254. [Google Scholar] [CrossRef]
- Chen, L.; Li, Z.; Zhang, Y.; Zhang, Y. An improved quantum particle swarm photovoltaic multi-peak mppt method combined with Lévy flight. Energy Sci. Eng. 2020, 8, 3980–3994. [Google Scholar] [CrossRef]
- Habib, M.; Aljarah, I.; Faris, H. A modified multi-objective particle swarm optimizer-based Lévy flight: An approach toward intrusion detection in internet of things. Arab. J. Sci. Eng. 2020, 45, 6081–6108. [Google Scholar] [CrossRef]
- Motamarri, R.; Nagu, B. Gmppt by using pso based on Lévy flight for photovoltaic system under partial shading conditions. IET Renew. Power Gener. 2020, 14, 1143–1155. [Google Scholar] [CrossRef]
- Zhou, B.; Liao, X. Particle filter and Lévy flight-based decomposed multi-objective evolution hybridized particle swarm for flexible job shop greening scheduling with crane transportation. Appl. Soft Comput. 2020, 91, 106217. [Google Scholar] [CrossRef]
- Charin, C.; Ishak, D.; Mohd Zainuri, M.A.A.; Ismail, B.; Mohd Jamil, M.K. A hybrid of bio-inspired algorithm based on Lévy flight and particle swarm optimizations for photovoltaic system under partial shading conditions. Sol. Energy 2021, 217, 1–14. [Google Scholar] [CrossRef]
- Dash, D.R.; Dash, P.K.; Bisoi, R. Short term solar power forecasting using hybrid minimum variance expanded rvfln and sine-cosine Lévy flight pso algorithm. Renew. Energy 2021, 174, 513–537. [Google Scholar] [CrossRef]
- Kalakanti, A.K.; Rao, S. A hybrid cooperative method with Lévy flights for electric vehicle charge scheduling. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Yang, M.; Li, J.; Li, J.; Yuan, X.; Xu, J. Reconfiguration strategy for dc distribution network fault recovery based on hybrid particle swarm optimization. Energies 2021, 14, 7145. [Google Scholar] [CrossRef]
- Chegini, S.N.; Amini, P.; Ahmadi, B.; Bagheri, A.; Amirmostofian, I. Intelligent bearing fault diagnosis using swarm decomposition method and new hybrid particle swarm optimization algorithm. Soft Comput. 2022, 26, 1475–1497. [Google Scholar] [CrossRef]
- Mukherjee, D.; Mallick, S.; Rajan, A. A levy flight motivated meta-heuristic approach for enhancing maximum loadability limit in practical power system. Appl. Soft Comput. 2022, 114, 108146. [Google Scholar] [CrossRef]
- Boudjemaa, R.; Oliva, D.; Ouaar, F. Fractional Lévy flight bat algorithm for global optimisation. Int. J. Bio-Inspired Comput. 2020, 15, 100–112. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z.; Si, L.; Tong, K.; Tan, C. A novel path planning method of mobile robots based on an improved bat algorithm. Proc. Inst. Mech. Eng. Part C-J. Mech. Eng. Sci. 2021, 235, 3071–3086. [Google Scholar] [CrossRef]
- Li, Y.; Li, X.; Liu, J.; Ruan, X. An improved bat algorithm based on lévy flights and adjustment factors. Symmetry 2019, 11, 925. [Google Scholar] [CrossRef] [Green Version]
- Hajizadeh, N.; Javidan, R.; Shamsinejad, P.; Akbari, R. Node deployment in wireless sensor networks using the new multi-objective Lévy flight bee algorithm. IET Wirel. Sens. Syst. 2020, 10, 78–87. [Google Scholar] [CrossRef]
- Saji, Y.; Barkatou, M. A discrete bat algorithm based on Lévy flights for euclidean traveling salesman problem. Expert Syst. Appl. 2021, 172, 114639. [Google Scholar] [CrossRef]
- Ghafarzadeh, H.; Bouyer, A. An efficient hybrid clustering method using an artificial bee colony algorithm and mantegna Lévy distribution. Int. J. Artif. Intell. Tools 2016, 25, 1550034. [Google Scholar] [CrossRef]
- Aydoğdu, İ.; Akın, A.; Saka, M.P. Design optimization of real world steel space frames using artificial bee colony algorithm with levy flight distribution. Adv. Eng. Softw. 2016, 92, 1–14. [Google Scholar] [CrossRef]
- Chen, M. Improved artificial bee colony algorithm based on escaped foraging strategy. J. Chin. Inst. Eng. 2019, 42, 516–524. [Google Scholar] [CrossRef]
- Dong, C.; Xiong, Z.; Liu, X.; Ye, Y.; Yang, Y.; Guo, W. Dual-search artificial bee colony algorithm for engineering optimization. IEEE Access 2019, 7, 24571–24584. [Google Scholar] [CrossRef]
- Jadon, S.S.; Bansal, J.C.; Tiwari, R. Escalated convergent artificial bee colony. J. Exp. Theor. Artif. Intell. 2015, 28, 181–200. [Google Scholar] [CrossRef]
- Liu, F.; Sun, Y.; Wang, G.-g.; Wu, T. An artificial bee colony algorithm based on dynamic penalty and Lévy flight for constrained optimization problems. Arab. J. Sci. Eng. 2018, 43, 7189–7208. [Google Scholar] [CrossRef]
- Panda, S. Performance improvement of optical cdma networks with stochastic artificial bee colony optimization technique. Opt. Fiber Technol. 2018, 42, 140–150. [Google Scholar] [CrossRef]
- Rambabu, B.; Venugopal Reddy, A.; Janakiraman, S. Hybrid artificial bee colony and monarchy butterfly optimization algorithm (HABC-MBOA)-based cluster head selection for wsns. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 1895–1905. [Google Scholar] [CrossRef]
- Shan, H.; Yasuda, T.; Ohkura, K. A self adaptive hybrid enhanced artificial bee colony algorithm for continuous optimization problems. Biosystems 2015, 132–133, 43–53. [Google Scholar] [CrossRef] [PubMed]
- Sharma, H.; Bansal, J.C.; Arya, K.V. Opposition based Lévy flight artificial bee colony. Memetic Comput. 2012, 5, 2652–2670. [Google Scholar] [CrossRef]
- Sharma, H.; Bansal, J.C.; Arya, K.V.; Yang, X.-S. Lévy flight artificial bee colony algorithm. Int. J. Syst. Sci. 2015, 47, 1–19. [Google Scholar] [CrossRef]
- Yahya, M.; Saka, M.P. Construction site layout planning using multi-objective artificial bee colony algorithm with Lévy flights. Autom. Constr. 2014, 38, 14–29. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, X. Multi-objective hybrid artificial bee colony algorithm enhanced with Lévy flight and self-adaption for cloud manufacturing service composition. Appl. Intell. 2017, 47, 721–742. [Google Scholar] [CrossRef]
- Abd Elaziz, M.; Lu, S.; He, S. A multi-leader whale optimization algorithm for global optimization and image segmentation. Expert Syst. Appl. 2021, 175, 114841. [Google Scholar] [CrossRef]
- Deepa, R.; Venkataraman, R. Enhancing whale optimization algorithm with Lévy flight for coverage optimization in wireless sensor networks. Comput. Electr. Eng. 2021, 94, 107359. [Google Scholar] [CrossRef]
- Lai, V.; Huang, Y.F.; Koo, C.H.; Ahmed, A.N.; El-Shafie, A. Optimization of reservoir operation at klang gate dam utilizing a whale optimization algorithm and a Lévy flight and distribution enhancement technique. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1682–1702. [Google Scholar] [CrossRef]
- Liu, J.; Shi, J.; Hao, F.; Dai, M. A novel enhanced global exploration whale optimization algorithm based on Lévy flights and judgment mechanism for global continuous optimization problems. Eng. Comput. 2022. [Google Scholar] [CrossRef]
- Liu, M.; Yao, X.; Li, Y. Hybrid whale optimization algorithm enhanced with Lévy flight and differential evolution for job shop scheduling problems. Appl. Soft Comput. 2020, 87, 105954. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Tang, J. Modified whale optimization algorithm for underwater image matching in a UUV vision system. Multimed. Tools Appl. 2021, 80, 187–213. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Zeng, J.; Tang, J. Nature-inspired approach: An enhanced whale optimization algorithm for global optimization. Math. Comput. Simul. 2021, 185, 17–46. [Google Scholar] [CrossRef]
- Bandopadhyay, J.; Roy, P.K. Application of hybrid multi-objective moth flame optimization technique for optimal performance of hybrid micro-grid system. Appl. Soft Comput. 2020, 95, 106487. [Google Scholar] [CrossRef]
- Khurma, R.A.; Aljarah, I.; Sharieh, A. A simultaneous moth flame optimizer feature selection approach based on Lévy flight and selection operators for medical diagnosis. Arab. J. Sci. Eng. 2021, 46, 8415–8440. [Google Scholar] [CrossRef]
- Ni, Y.; Xu, J.; Zhu, C.; Pei, L. Accurate residual capacity estimation of retired lifepo4 batteries based on mechanism and data-driven model. Appl. Energy 2022, 305, 117922. [Google Scholar] [CrossRef]
- Rahman, H.F.; Janardhanan, M.N.; Chuen, L.P.; Ponnambalam, S.G. Flowshop scheduling with sequence dependent setup times and batch delivery in supply chain. Comput. Ind. Eng. 2021, 158, 107378. [Google Scholar] [CrossRef]
- Suja, K.R. Mitigation of power quality issues in smart grid using Lévy flight based moth flame optimization algorithm. Journa Ambient Intell. Humaniz. Comput. 2021, 12, 9209–9228. [Google Scholar] [CrossRef]
- Ren, H.; Li, J.; Chen, H.; Li, C. Adaptive Lévy-assisted salp swarm algorithm: Analysis and optimization case studies. Mathema Comput. Simul. 2021, 181, 380–409. [Google Scholar] [CrossRef]
- Nasri, D.; Mokeddem, D.; Bourouba, B.; Bosche, J. A novel Lévy flight trajectory-based salp swarm algorithm for photovoltaic parameters estimation. J. Inf. Optim. Sci. 2021, 42, 1841–1867. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.S. Improved salp swarm algorithm based on Lévy flight and sine cosine operator. IEEE Access 2020, 8, 99740–99771. [Google Scholar] [CrossRef]
- Yang, X.-S. Firefly algorithm, levy flights and global optimization. In Research and Development in Intelligent Systems xxvi; Bramer, M., Ellis, R., Petridis, M., Eds.; Springer: London, UK, 2010; pp. 209–218. [Google Scholar]
- Singh, H.; Singh, B.; Kaur, M. An improved elephant herding optimization for global optimization problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Wang, H.-J.; Jin, T.; Wang, H.; Su, D. Application of ieho-bp neural network in forecasting building cooling and heating load. Energy Rep. 2022, 8, 455–465. [Google Scholar] [CrossRef]
- Xu, H.; Cao, Q.; Fang, C.; Fu, Y.; Su, J.; Wei, S.; Bykovyy, P. In Application of elephant herd optimization algorithm based on levy flight strategy in intrusion detection. In Proceedings of the 2018 IEEE 4th International Symposium on Wireless Systems within the International Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Lviv, Ukraine, 20–21 September 2018; pp. 16–20. [Google Scholar]
- Li, X.; Gu, J.; Sun, X.; Li, J.; Tang, S. Parameter identification of robot manipulators with unknown payloads using an improved chaotic sparrow search algorithm. Appl. Intell. 2022, 52, 10341–10351. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Wang, Z.; Ma, C.; Song, Z. A vmd-cissa-lssvm based electricity load forecasting model. Mathematics 2022, 10, 28. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Gandomi, A.H.; Cao, L.; Alavi, A.H.; Duan, H.; Li, J. Lévy-flight krill herd algorithm. Math. Probl. Eng. 2013, 2013, 682073. [Google Scholar] [CrossRef]
- Guo, L.; Wang, G.-G.; Gandomi, A.H.; Alavi, A.H.; Duan, H. A new improved krill herd algorithm for global numerical optimization. Neurocomputing 2014, 138, 392–402. [Google Scholar] [CrossRef]
- Chen, Y.; Xi, J.; Wang, H.; Liu, X. Grey wolf optimization algorithm based on dynamically adjusting inertial weight and levy flight strategy. Evol. Intell. 2022. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. Enhanced leadership-inspired grey wolf optimizer for global optimization problems. Engingeering Comput. 2020, 36, 1777–1800. [Google Scholar] [CrossRef]
- Hu, J.; Chen, H.; Heidari, A.A.; Wang, M.; Zhang, X.; Chen, Y.; Pan, Z. Orthogonal learning covariance matrix for defects of grey wolf optimizer: Insights, balance, diversity, and feature selection. Knowl.-Based Syst. 2021, 213, 106684. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Zhou, M. Dimensional learning strategy-based grey wolf optimizer for solving the global optimization problem. Comput. Intell. Neurosci. 2022, 2022, 3603607. [Google Scholar] [CrossRef]
- Zhou, B.; Lei, Y. Bi-objective grey wolf optimization algorithm combined Lévy flight mechanism for the fmc green scheduling problem. Appl. Soft Comput. 2021, 111, 107717. [Google Scholar] [CrossRef]
- Goyal, K.K.; Sharma, N.; Gupta, R.D.; Gupta, S.; Rani, D.; Kumar, D.; Sharma, V.S. Measurement of performance characteristics of wedm while processing az31 Mg-alloy using Lévy flight mogwo for orthopedic application. Int. J. Adv. Manuf. Technol. 2022, 119, 7175–7197. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Z.; Luan, S.; Li, X. A hybrid max-min ant system by levy flight and opposition-based learning. Engingeering Intern. J. Pattern Recognit. Artif. Intell. 2021, 35, 2151013. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, B. A novel ant colony optimization algorithm with levy flight. IEEE Access 2020, 8, 67205–67213. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, B.; Li, H. Improving ant colony optimization algorithm with epsilon greedy and Lévy flight. Complex Intell. Syst. 2021, 7, 1711–1722. [Google Scholar] [CrossRef] [Green Version]
- Tarkhaneh, O.; Shen, H. Training of feedforward neural networks for data classification using hybrid particle swarm optimization, mantegna Lévy flight and neighborhood search. Heliyon 2019, 5, e01275. [Google Scholar] [CrossRef] [Green Version]
- Fileccia Scimemi, G.; Turetta, T.; Celauro, C. Backcalculation of airport pavement moduli and thickness using the Lévy ant colony optimization algorithm. Constr. Build. Mater. 2016, 119, 288–295. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, Y.; Zhang, S.; Luo, Y.; Zhang, L. Ant colony optimization for cuckoo search algorithm for permutation flow shop scheduling problem. Syst. Sci. Control Eng. 2018, 7, 20–27. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, H.; Cao, Y.; Liu, Q.; Shen, Z.; Wang, J.; Hu, M. A hybrid ant colony and cuckoo search algorithm for route optimization of heating engineering. Energies 2018, 11, 2675. [Google Scholar] [CrossRef] [Green Version]
- Coelho, L.d.S.; Bora, T.C.; Mariani, V.C. Differential evolution based on truncated Lévy-type flights and population diversity measure to solve economic load dispatch problems. Int. J. Electr. Power Energy Syst. 2014, 57, 178–188. [Google Scholar] [CrossRef]
- Suresh, S.; Lal, S. Modified differential evolution algorithm for contrast and brightness enhancement of satellite images. Appl. Soft Comput. 2017, 61, 622–641. [Google Scholar] [CrossRef]
- Tarkhaneh, O.; Moser, I. An improved differential evolution algorithm using archimedean spiral and neighborhood search based mutation approach for cluster analysis. Future Gener. Comput. Syst. 2019, 101, 921–939. [Google Scholar] [CrossRef]
- Tarkhaneh, O.; Shen, H. An adaptive differential evolution algorithm to optimal multi-level thresholding for MRI brain image segmentation. Expert Syst. Appl. 2019, 138, 112820. [Google Scholar] [CrossRef]
- Zhao, F.; Xue, F.; Zhang, Y.; Ma, W.; Zhang, C.; Song, H. A hybrid algorithm based on self-adaptive gravitational search algorithm and differential evolution. Expert Syst. Appl. 2018, 113, 515–530. [Google Scholar] [CrossRef]
- Zhang, J.-H.; Li, A.-P.; Liu, X.-M. Hybrid genetic algorithm for a type-ii robust mixed-model assembly line balancing problem with interval task times. Adv. Manuf. 2019, 7, 117–132. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Cai, Y.; Tang, D.; Chen, W.; Hu, L. Memetic quantum optimization algorithm with Lévy flight for high dimension function optimization. Appl. Intell. 2022. [Google Scholar] [CrossRef]
- Coelho, L.d.S.; Bora, T.C.; Klein, C.E. A genetic programming approach based on Lévy flight applied to nonlinear identification of a poppet valve. Appl. Math. Model. 2014, 38, 1729–1736. [Google Scholar] [CrossRef]
- Alshmrany, S. Adaptive learning style prediction in e-learning environment using Lévy flight distribution based cnn model. Clust. Comput.-J. Netw. Softw. Tools Appl. 2022, 25, 523–536. [Google Scholar] [CrossRef]
- Amirsadri, S.; Mousavirad, S.J.; Ebrahimpour-Komleh, H. A Lévy flight-based grey wolf optimizer combined with back-propagation algorithm for neural network training. Neural Comput. Appl. 2018, 30, 3707–3720. [Google Scholar] [CrossRef]
- Chidadala, J.; Ramanaiah, K.V.; Babulu, K. Design of convolutional neural network with cuckoo search algorithm for super-resolution uhd systems on fpga. J. Circuits Syst. Comput. 2021, 30, 2150155. [Google Scholar] [CrossRef]
- He, S. Training artificial neural networks using Lévy group search optimizer. J. Mult.-Valued Log. Soft Comput. 2010, 16, 527–545. [Google Scholar]
- He, X.; Zhang, G.; Chen, Y.; Yang, S. Multi-class algorithm of woa-svm using Lévy flight and elite opposition-based learning. Appl. Res. Comput. 2021, 38, 3640–3645. [Google Scholar]
- Jalali, S.M.J.; Ahmadian, S.; Khodayar, M.; Khosravi, A.; Ghasemi, V.; Shafie-khah, M.; Nahavandi, S.; Catalao, J.P.S. Towards novel deep neuroevolution models: Chaotic Lévy grasshopper optimization for short-term wind speed forecasting. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Khan, A.; Shah, R.; Imran, M.; Khan, A.; Bangash, J.I.; Shah, K. An alternative approach to neural network training based on hybrid bio meta-heuristic algorithm. J. Ambient Intell. Humaniz. Comput. 2019, 10, 3821–3830. [Google Scholar] [CrossRef]
- Li, L.-L.; Liu, Z.-F.; Tseng, M.-L.; Chiu, A.S.F. Enhancing the lithium-ion battery life predictability using a hybrid method. Appl. Soft Comput. 2019, 74, 110–121. [Google Scholar] [CrossRef]
- Li, W.; Wang, G.-G. Elephant herding optimization using dynamic topology and biogeography-based optimization based on learning for numerical optimization. Eng. Comput. 2022, 38, 1585–1613. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, L.; An, Q.; Zhou, Q.; Hong, H. Learning a contrast enhancer for intensity correction of remotely sensed images. IEEE Signal Process. Lett. 2022, 29, 394–398. [Google Scholar] [CrossRef]
- Huang, Z.; Li, X.; Wang, L.; Fang, H.; Ma, L.; Shi, Y.; Hong, H. Spatially adaptive multi-scale image enhancement based on nonsubsampled contourlet transform. Infrared Phys. Technol. 2022, 121, 104014. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | The Literature |
|---|---|
| Cuckoo search having Lévy flight | [16,29,67,68,87,88,89,90,91,92,93,94] |
| Monarch butterfly optimization Algorithm having Lévy flight | [55,95,96] |
| Moth search having Lévy flight | [38,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111] |
| Algorithms | The Literature |
|---|---|
| Lévy flight used in particle swarm optimization algorithm | [25,46,47,121,122,123,124,125,126,127,128,129,130,131,132,133,134,135] |
| Lévy flight used in artificial bat algorithm | [136,137,138,139,140] |
| Lévy flight used in bee colony algorithm | [57,58,141,142,143,144,145,146,147,148,149,150,151,152,153] |
| Lévy flight used in whale optimization algorithm | [154,155,156,157,158,159,160] |
| Lévy flight used in moth-flame algorithm | [79,161,162,163,164,165] |
| Lévy flight used in salp swarm algorithm | [31,166,167,168] |
| Lévy flight used in firefly algorithm | [75,76,169] |
| Lévy flight used in elephant herding optimization algorithm | [170,171,172] |
| Lévy flight used in sparrow search algorithm | [173,174] |
| Lévy flight used in krill herd algorithm | [175,176] |
| Lévy flight grey wolf optimization algorithm | [84,177,178,179,180,181,182] |
| Lévy flight used in ant colony optimization algorithm | [183,184,185,186,187,188,189] |
| Name | Reference |
|---|---|
| Lévy flight used in differential evolution | [51,112,190,191,192,193,194] |
| Lévy flight used in genetic algorithm | [40,195] |
| Lévy flight used in memetic algorithm | [77,78,196] |
| Lévy flight used in general programming | [197] |
| Journal | Author | Year |
|---|---|---|
| Cluster Computing-The Journal of Networks Software Tools and Applications | Alshmrany et al., [198] | 2022 |
| Applied Soft Computing | Alweshah et al., [22] | 2015 |
| Neural Computing and Applications | Amirsadri et al., [199] | 2018 |
| Evolutionary Intelligence | Bousmaha et al., [25] | 2021 |
| Journal of Circuits Systems and Computers | Chidadala et al., [200] | 2021 |
| Journal of Multiple-Valued Logic and Soft Computing | He et al., [201] | 2010 |
| Application Research of Computers | He et al., [202] | 2021 |
| Engineering With Computers | Jalali et al., [203] | 2021 |
| Journal of Ambient Intelligence and Humanized Computing | Khan et al., [204] | 2019 |
| Applied Soft Computing | Li et al., [205] | 2019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; An, Q.; Lei, H.; Deng, Q.; Wang, G.-G. Survey of Lévy Flight-Based Metaheuristics for Optimization. Mathematics 2022, 10, 2785. https://doi.org/10.3390/math10152785
Li J, An Q, Lei H, Deng Q, Wang G-G. Survey of Lévy Flight-Based Metaheuristics for Optimization. Mathematics. 2022; 10(15):2785. https://doi.org/10.3390/math10152785
Chicago/Turabian StyleLi, Juan, Qing An, Hong Lei, Qian Deng, and Gai-Ge Wang. 2022. "Survey of Lévy Flight-Based Metaheuristics for Optimization" Mathematics 10, no. 15: 2785. https://doi.org/10.3390/math10152785
APA StyleLi, J., An, Q., Lei, H., Deng, Q., & Wang, G. -G. (2022). Survey of Lévy Flight-Based Metaheuristics for Optimization. Mathematics, 10(15), 2785. https://doi.org/10.3390/math10152785