1. Introduction
In conventional finite solid mechanics (cf. [
1,
2,
3,
4]), only the position (or, in alternative, the displacement) gradient is considered in the measurement of deformation. Experimentally observed phenomena such as the size effect and nonlocal behavior are excluded from this framework [
5]. In contrast, conventional solid mechanics predicts nonphysical effects, such as stress singularities at cracks and notch tips. This is especially taxing on numerical methods based on polynomials, since convergence failure is a fact in sharp corners, cracks and other geometrical disturbances. Alternatives to conventional theories have existed since the work of R.D. Mindlin [
6] and the identification of properties can now be performed using RVE (representative volume element) analysis [
7]. Since the classes of materials/constraints are shown to be equivalent to strain gradient models, large computational savings can be obtained by explicitly calculating the properties of the gradient models, see [
8,
9,
10].
Periodically arranged architectured materials [
11] can result in being too costly for direct simulations or even classical two-scale simulations.
If the simulation is part of a topological optimization process, a possible solution is homogenization. Energy equivalence requires that the homogenized continuum includes higher-order displacement derivatives. For certain cases (see, e.g., [
11,
12,
13]), the second derivatives are sufficient. That is the case for the problem under analysis here and homogenization procedures have been established for determining the properties for the gradient model, e.g., [
9]. Of course, a discretization compatible with
continuity is required. The range of the applications of these gradient models is vast: from composites [
13] to strain localization regularization, see, e.g., [
14]. In addition, application to the Stokes equations is straightforward, and the analysis can be adopted in fluid mechanics.
For our current application, porous materials are known to be equivalent to the strain gradient continuum [
15]. The general form of the isotropic sixth-order elasticity tensor is derived in Dell’Isolla’s work [
8] and employed in this work.
The distinctive features of this work are the following:
Full 3D RVE analysis and generalized continua for a material containing spherical voids.
The use of enriched radial basis functions (RBF) with the first and second derivatives of the shape functions obtained in closed form.
RVE analysis is based on quadratic displacement at the faces and the least-squares fitting of constitutive properties.
The paper is organized as follows: Interpolation with enriched radial basis functions is described in
Section 2. The Green–Lagrange strain and its derivative are derived in closed form in
Section 3. In
Section 4, details concerning the constitutive laws with second-order terms are exposed. Following that, in
Section 5, the homogenization process is described. Validation examples are shown in
Section 6 which provide a demonstration of two known effects of second-order models: the size effect and the removal of stress singularities. Finally, in
Section 7, conclusions are drawn concerning the formulation and results.
2. Interpolation
The discretization of finite gradient models, see [
16], requires the first and second derivatives of the unknown solution. This precludes the use of well-established finite element technology. Possible alternatives are meshless methods. Specifically, the radial basis function (RBF) method for PDE was introduced by Kansa [
17]. Wu [
18] and Wendland [
19] introduced RBFs with compact support. RBFs are appropriate for gradient models for the following reasons:
The analysis of [
21] showed that RBF enriched with polynomials results in a more robust interpolation than classical-polynomial-based moving-least-squares (MLS). We use a compact RBF enriched with a quadratic polynomial. Given
nodes belonging to the support set
, an interpolation function
is constructed by multiplying a set of
radial basis functions
by a set of
unknown parameters
, with
where
is the distance between
and
:
The interpolation condition for node
N is written by specializing the inner product (
1):
We introduce the notation
and
, which results in the following solution:
Inserting
in the interpolation Formula (
1), we obtain the inner product of a shape function array and nodal function images:
where
is the array of shape functions. If a monomial basis term
of dimension
is added to the interpolation, the result is:
where
are additional parameters. The evaluation of
at the nodes is similar to the previous notation:
If
represents the images of a given polynomial
evaluated at nodes
with
, i.e.,
, then
For this polynomial
, we have the following result for
:
We premultiply both sides of (
9) by
, and this will result in
The full interpolation system is given by:
The purpose of this constrained system is to ensure the exact reproduction of constant and linear displacement fields [
22]. For nonsingular
, we have the classical solutions for
and
:
where
is obtained for nonsingular
. We note that the matrix
in (
14) is at most
for a quadratic monomial in 3D and a dedicated subroutine can be adopted. With this result, we obtain the following form for the shape functions:
with
For conciseness, the component-wise format is presented here for both the first and second derivatives:
with
where
is identified by the radius function
. We now particularize the bases
and
as a radial basis function’s basis and a quadratic basis, respectively. Compact support RBF bases by Wendland are used, see [
19,
20]. These are the appropriate forms for the solid mechanics problem under study, where the quadratic case in 3D is written:
where
is the support radius, here determined from the preassigned number of support nodes, see [
23]. In the 3D examples, we use 25 nodes for each quadrature point, which is found to be sufficient to capture the second derivatives.
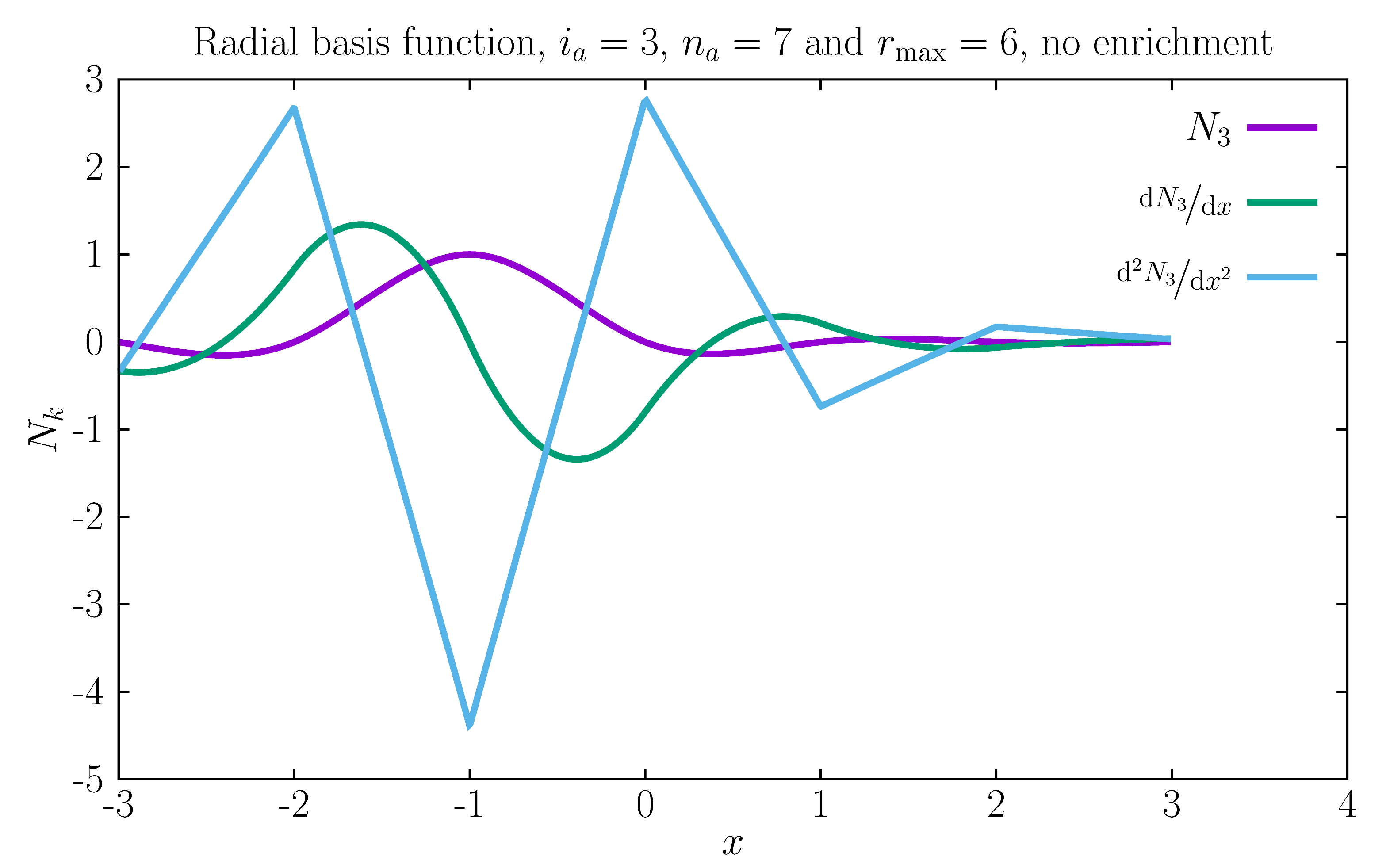
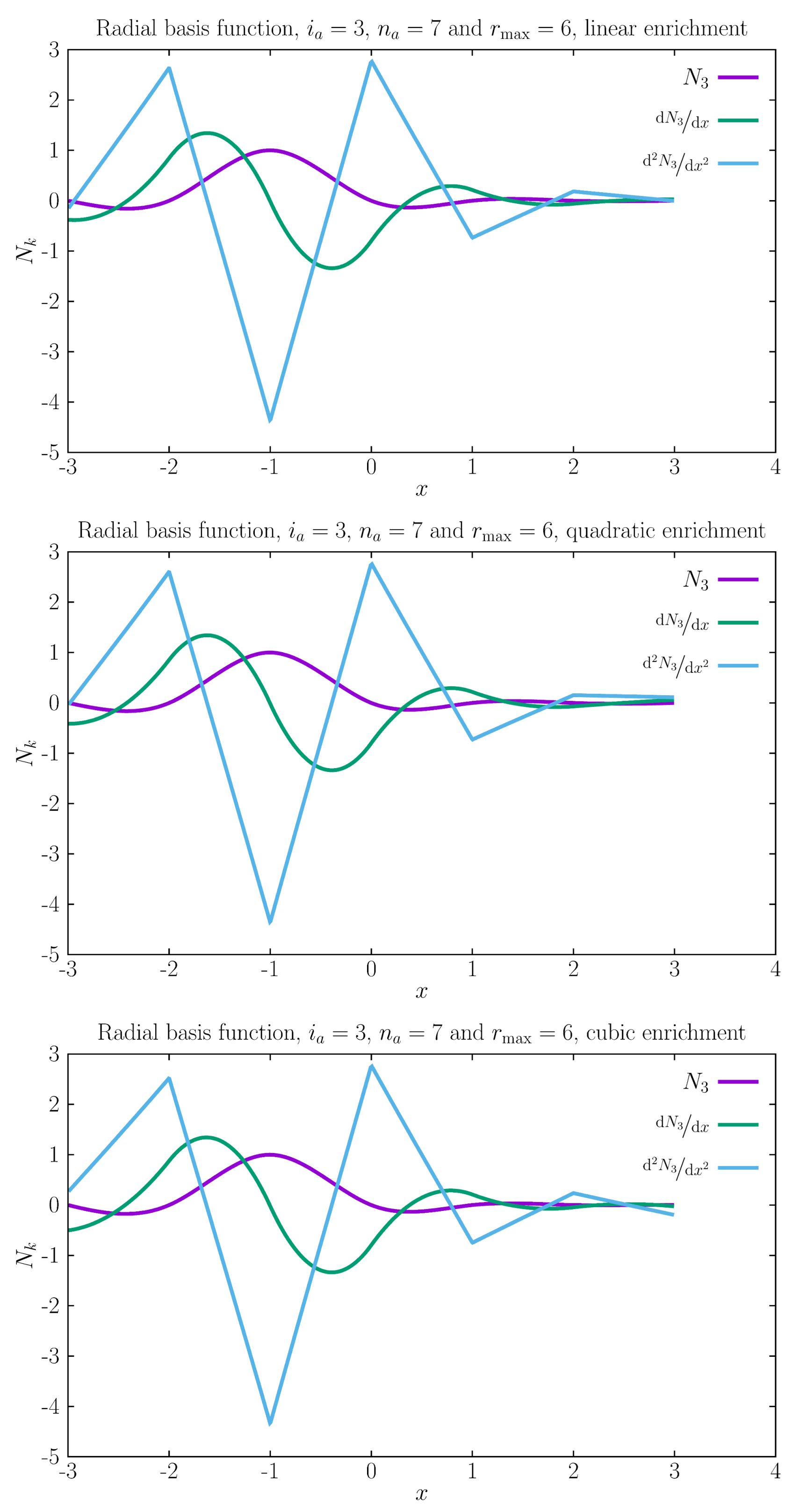
A plot of the shape functions and derivatives is exhibited in
Figure 1. We observe that the second derivative is quasilinear, regardless of the polynomial enrichment. The reason for this behavior is that the shape functions depend on the radius and this will appear as a cubic power in the denominator of the derivative with respect to the position
. Since a shape function derivative is a sum of two terms, (
17), the radial basis term imposes the smoothness of the second derivative. Note that even with polynomial enrichment, the second derivative is continuous. A simple calculation shows that only the fourth derivative is discontinuous.
RBFs are implemented in our own software SimPlas (
www.simplassoftware.com), cf. [
24], using Mathematica [
25] with the AceGen add-on [
26]. The specific source code for the RBF part of this work is provided in Github [
27].
3. Green–Lagrange Strain, Its Material Derivative and Nodal Sensitivity
Using shape functions and their first and second derivatives obtained from the meshless formalism, the following notation is adopted:
where the upper-case
K identifies a node, see, e.g., [
28]. Given the nodal spatial coordinates
with
L being the node number, the deformation gradient and its material derivative are given, respectively, by:
where the sum is implied in the nodal index
L. With respect to the nodal coordinates, the derivatives of the deformation gradients (
26) and (
27) are calculated as:
where the comma separates the continuum mechanics indices from the nodal quantities. Note that the deformation gradient and its material gradient are linear functions of the nodal coordinates. The Green–Lagrange strain and its first material derivative can be written using index notation as:
with an implicit sum on
n. Using the same notation, the following identities are a result of the chain rule:
After replacing (
28) and (
29) in (
32)–(
35), it is straightforward to obtain:
Table 1 organizes these quantities by derivative order.
Introducing the second Piola–Kirchhoff stress
, the hyperstress
, which is a third-order tensor, and the corresponding natural conditions [
29], we have the following:
is the volume force.
is the surface loas resulting from the projection of both the second Piola–Kirchhoff and the hyperstress on the undeformed normal
, see [
16].
is the double force per unit area. At the following holds:
is the distributed edge force, which is in action at the locations with discontinuous .
A weak form of equilibrium is established as (see [
8]):
The Jacobian is obtained by a subsequent variation of (
42), which is written as:
It is not efficient to calculate the quantities of
Table 1 separately for the geometric terms. In index notation, the terms are:
4. Constitutive Laws
For the linear case, we adopt the laws established by Dell’Isolla and coworkers [
8]. For the second Piola–Kirchhoff stress, Hooke’s law reads:
with
where
and
are the traditional Lamé parameters. These are related to the elastic properties
E and
as
and
and
. As in [
8], no coupling exists between the Green–Lagrange strain gradient and
. A sixth-order tensor is required to relate
with
:
For
, only five elastic parameters are required,
,
,
and
:
The positive-definiteness of the strain energy corresponding to
, see [
8], implies that:
With these terms, we can rewrite the variation of
as:
where
is given by:
5. Homogenization
For the determination of the seven properties
E,
,
,
,
and
, a homogenization process based on a multiple-RVE discretization is adopted. If an RVE with volume
is considered, where coordinates are identified as
and displacement as
, we use volume averaging to obtain the first and second macro displacement gradients:
from which
and
are obtained using (
30) and (
31).
This is implemented in SimPlas (
www.simplassoftware.com) (accessed on 6 June 2022), cf. [
24], using Mathematica [
25] with the AceGen add-on [
26]. The source code for the second derivatives is also provided in [
27].
Of course, for a given set of essential boundary conditions, we have
where
is the constitutive property array. By equating the RVE energy to
, we obtain the following identity:
which is the extended Hill–Mandel condition. Given that the energy of the RVE,
, depends on each load case
, with
, an over-determined system is obtained from identities (
51) as:
The vector form of (
52) is written as:
By using least-squares, we can replace the over-determined system (
52) by:
which can be solved as the linear system:
The dependence of the energy vector
on
is linear and this is reflected in the left-hand side of (
54). The derivative of
with respect to the properties is obtained as follows:
Each load case of the RVE provides a specific energy equivalence relation. Least-squares is adopted for the properties
. We chose, for each displacement component, the following polynomial basis:
which produces an over-determined system with
equations and seven unknowns. For all boundary nodes, we have
:
with
and
.
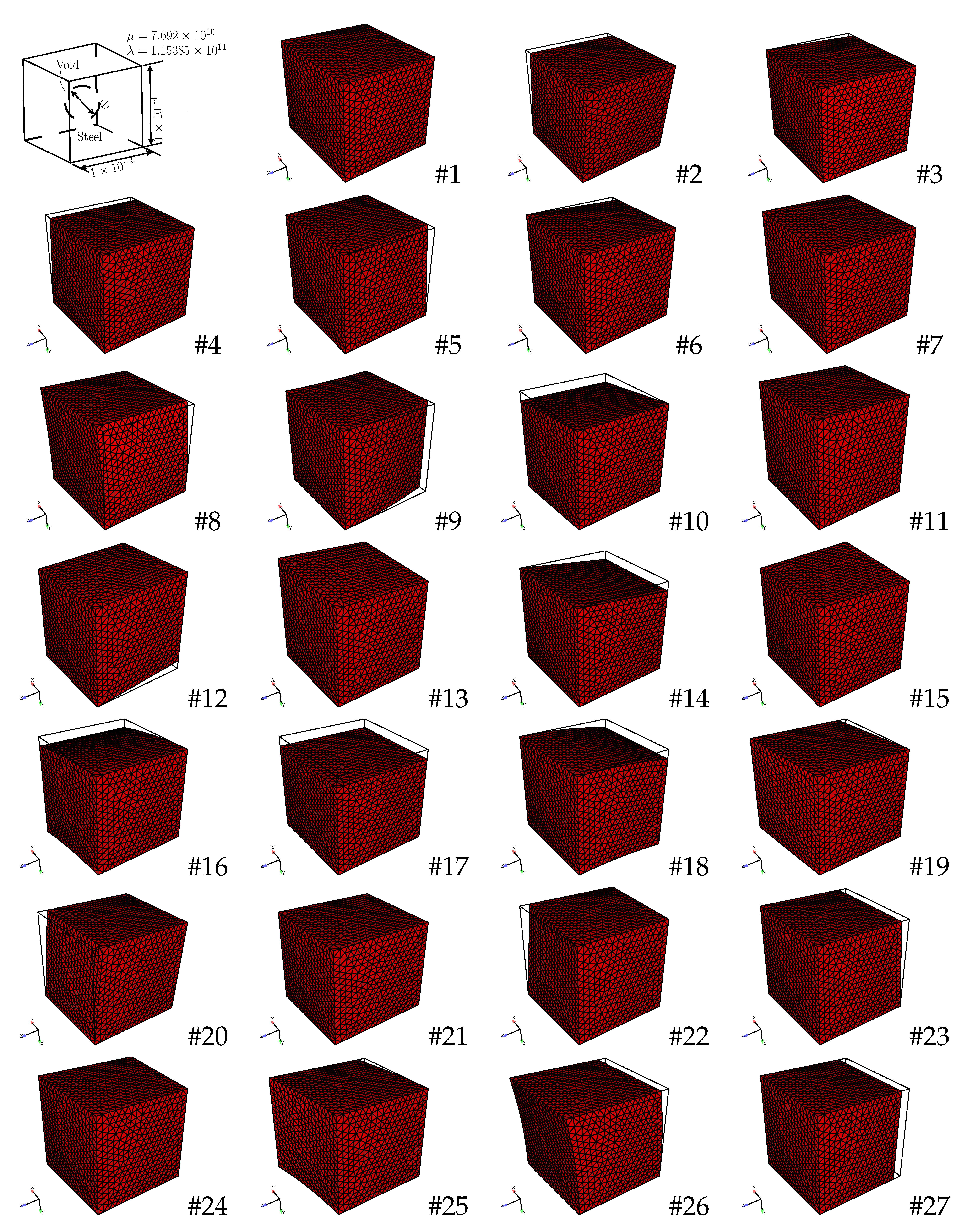
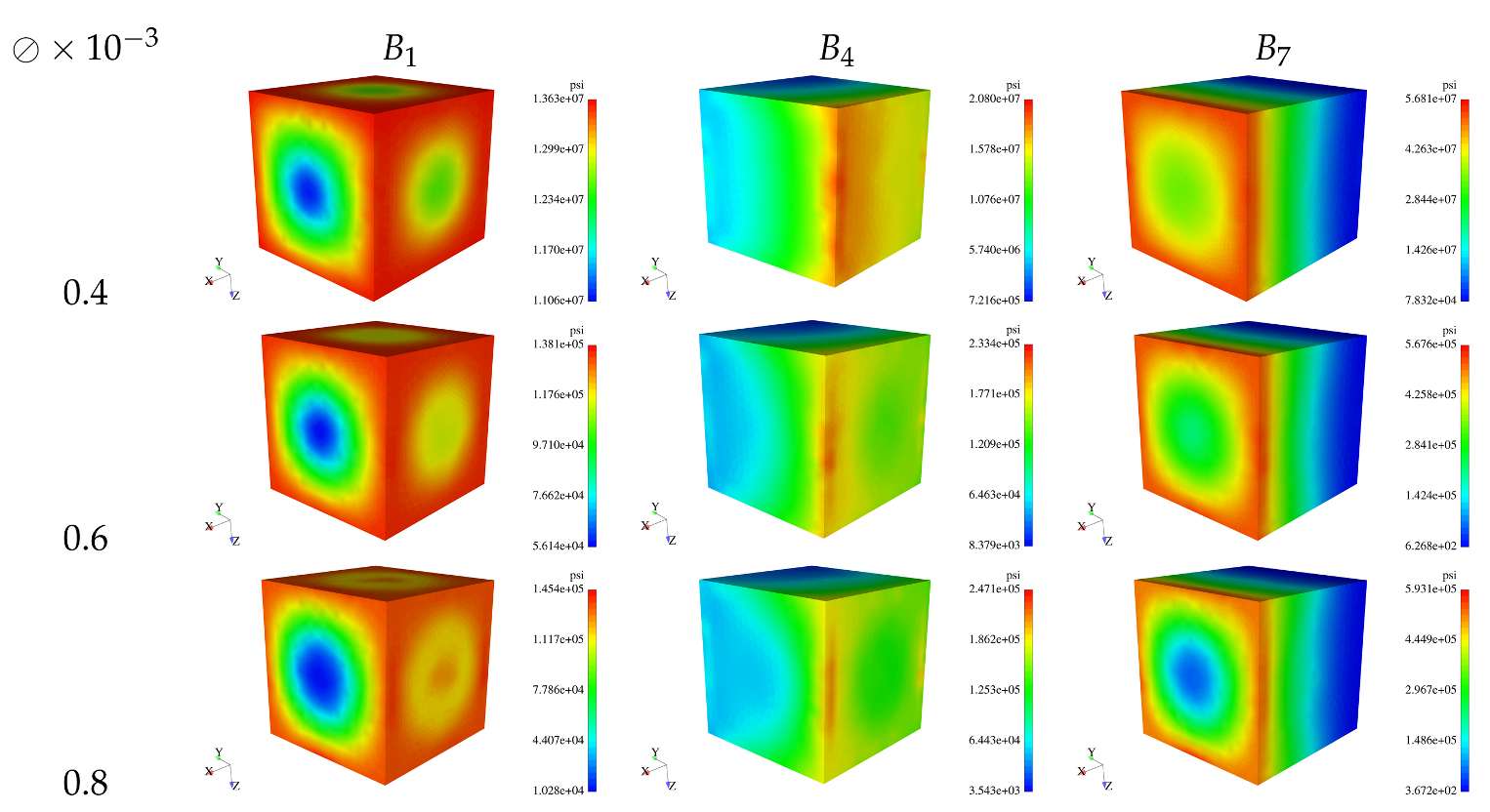
Table 2 shows all the imposed displacement cases and the RVE configurations are displayed in
Figure 2. In this Figure, ⊘ represents the spherical void diameter. The effect of the spherical voids is clearly shown in
Figure 3 for the three void radii.
We assess a single cell of the RVE, with the characteristic node distances
,
,
and
.
Table 3 shows the evolution of the constitutive properties for
and
.
A quadratic fit of
with ⊘ will result in:
For comparison, a classical homogenization procedure for the same problem will result in consistent but slightly distinct results. This is to be expected, as closed-form solutions for the gradient model with the present void problem are not present in the literature. The results from Chakraborty [
30] are adapted, with an equivalent void diameter ⊘ corresponding to the reported void fraction, and are shown in
Table 4. Since the diameters do not coincide, we use the quadratic fit for the Lamé parameters (
58) to calculate our values.
6. Macroscopic Size Effect
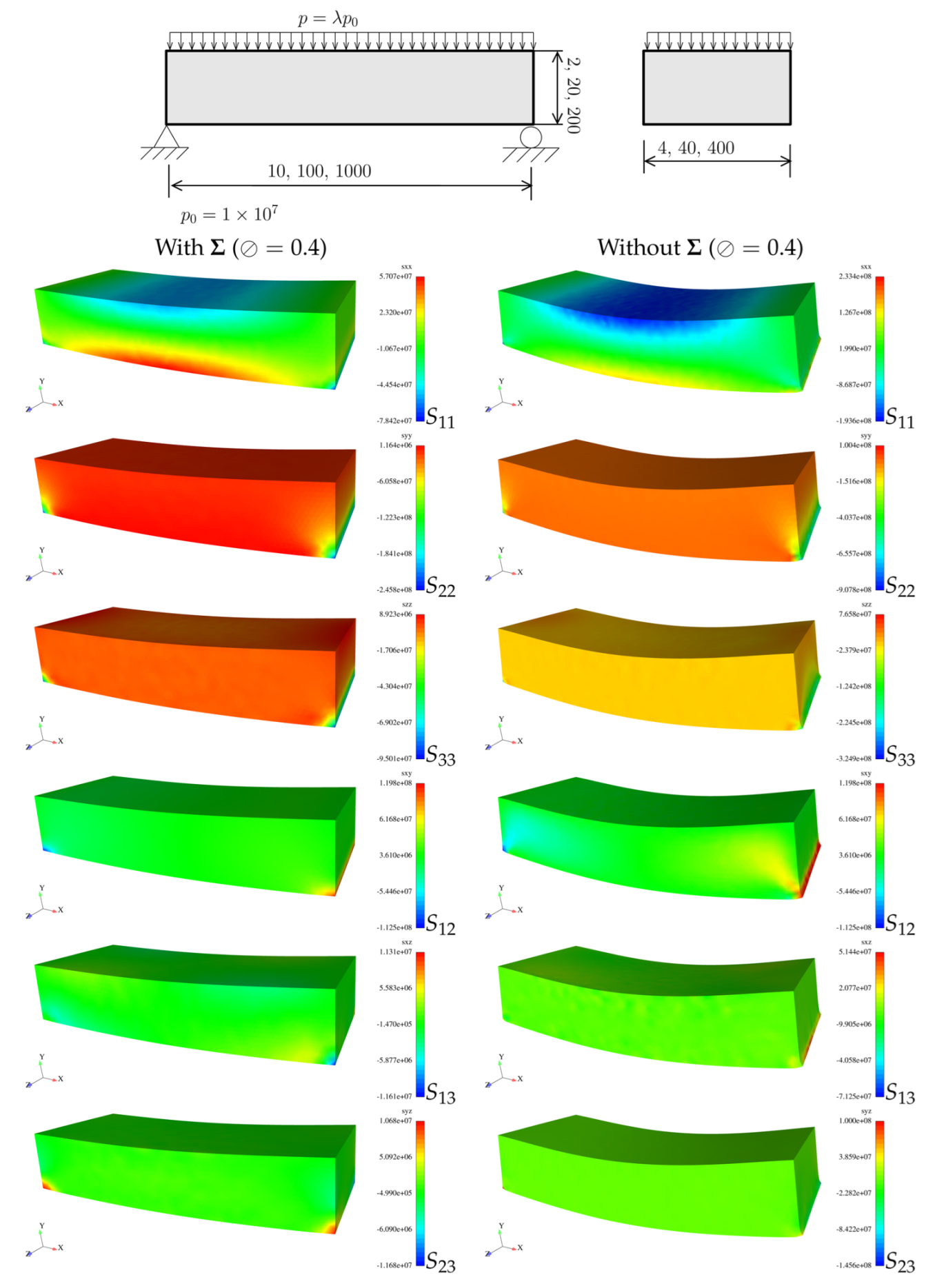
With the fitted properties, we validate the formulation with two exercises: The first one evaluates the effect of specimen size on the load/displacement results and the second shows the objectivity of stress components for a V-notched specimen. The first problem is identified in
Figure 4. It is a parallelepiped beam, twice simply supported and under uniform load. A full 3D analysis is performed with edge effects being observed for the classical elasticity model, see
Figure 4. This figure shows all six stress components for both models.
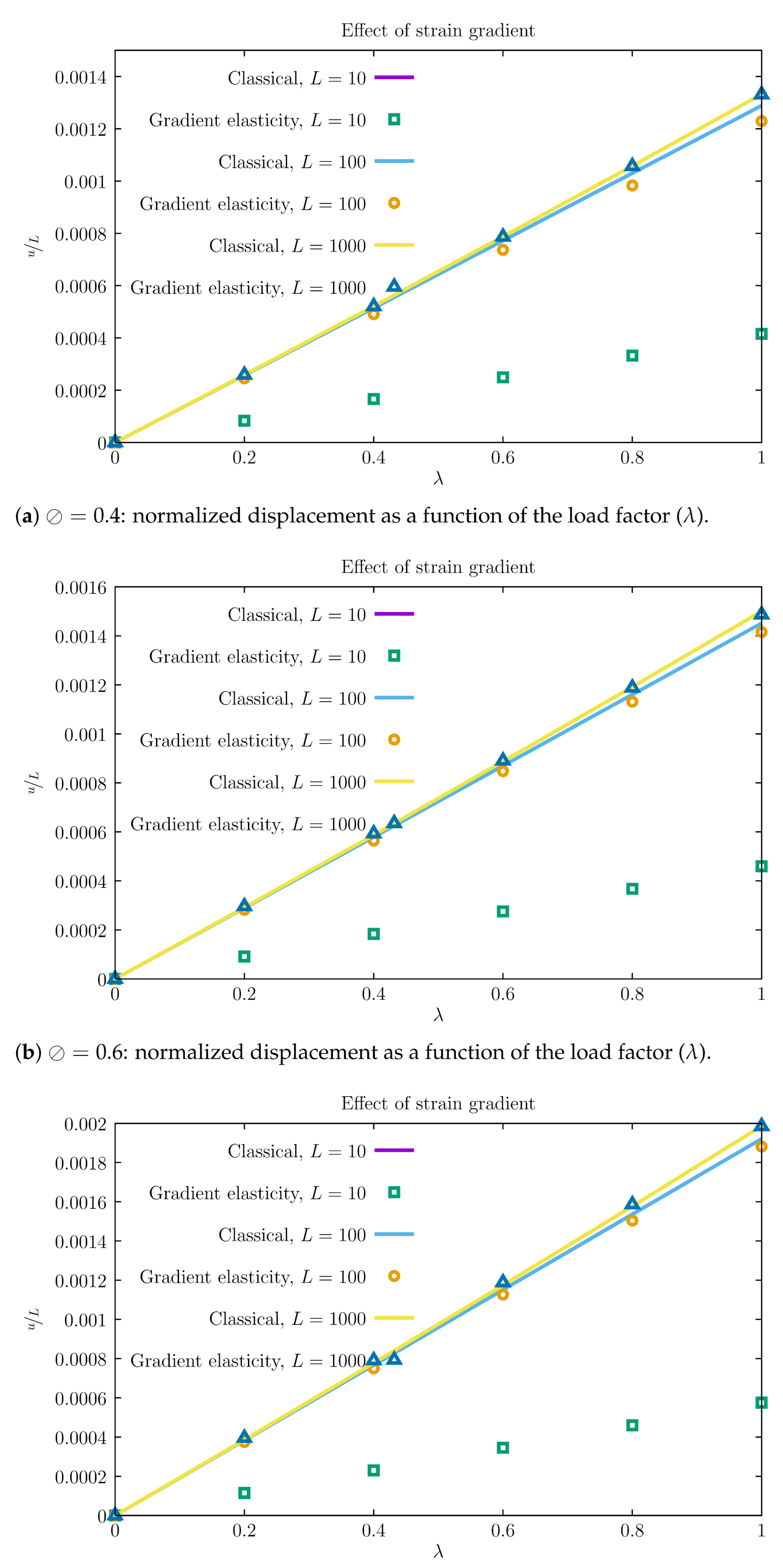
Figure 5 presents the results for the size effect for three specimens:
and 1000 mm. As theoretically predicted, smaller specimens show additional stiffness when the gradient model is considered. In addition, larger values of ⊘ decrease the stiffness of smaller specimens, due to both the reduced elastic modulus and also the effect of the strain gradient.
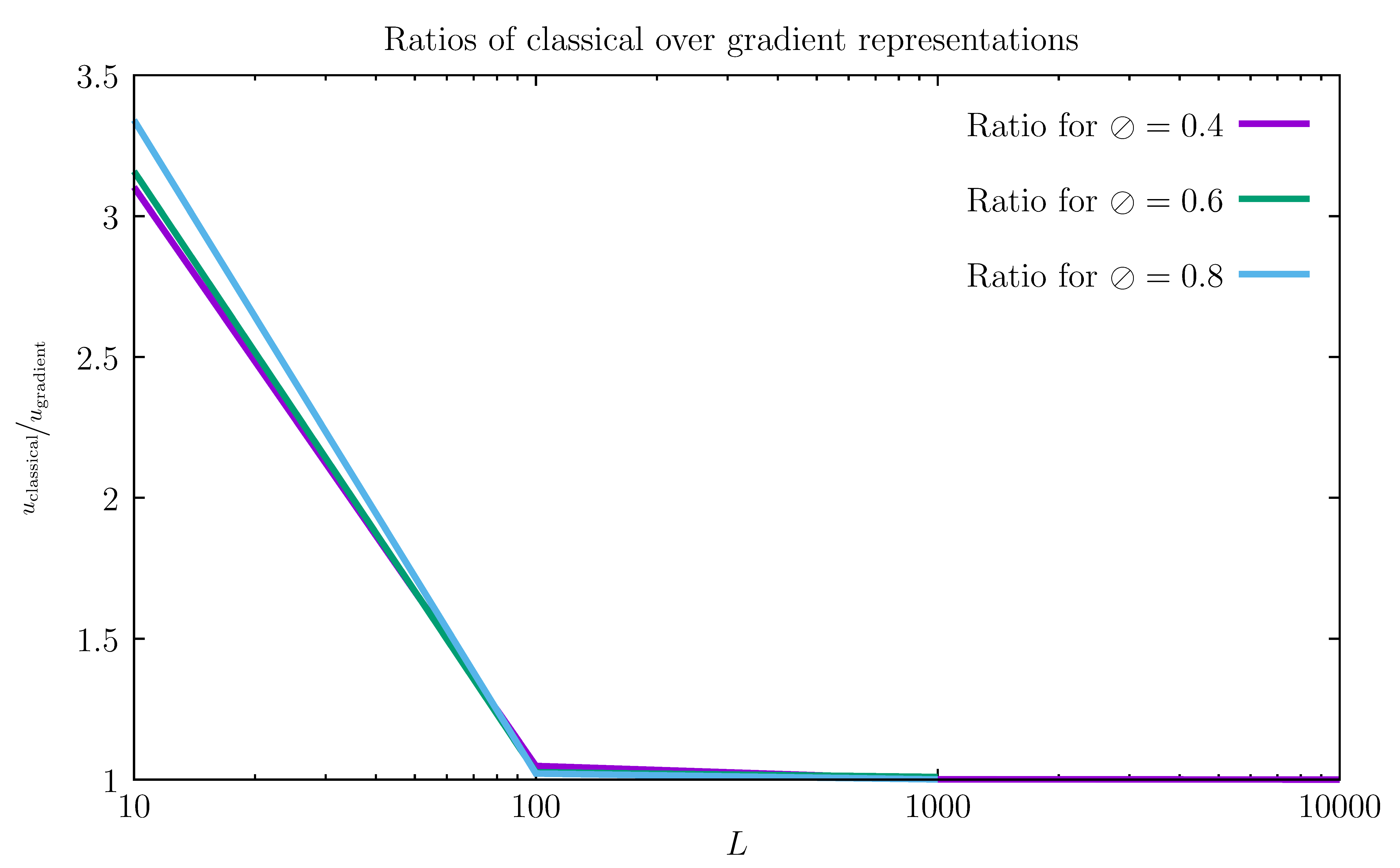
Figure 6 shows the effect of
L in the ratio between the displacements of the classical elasticity model and the gradient model. The effect is pronounced for the smaller specimen but then dissipates as the void dimensions become much smaller than the overall dimensions of the part.
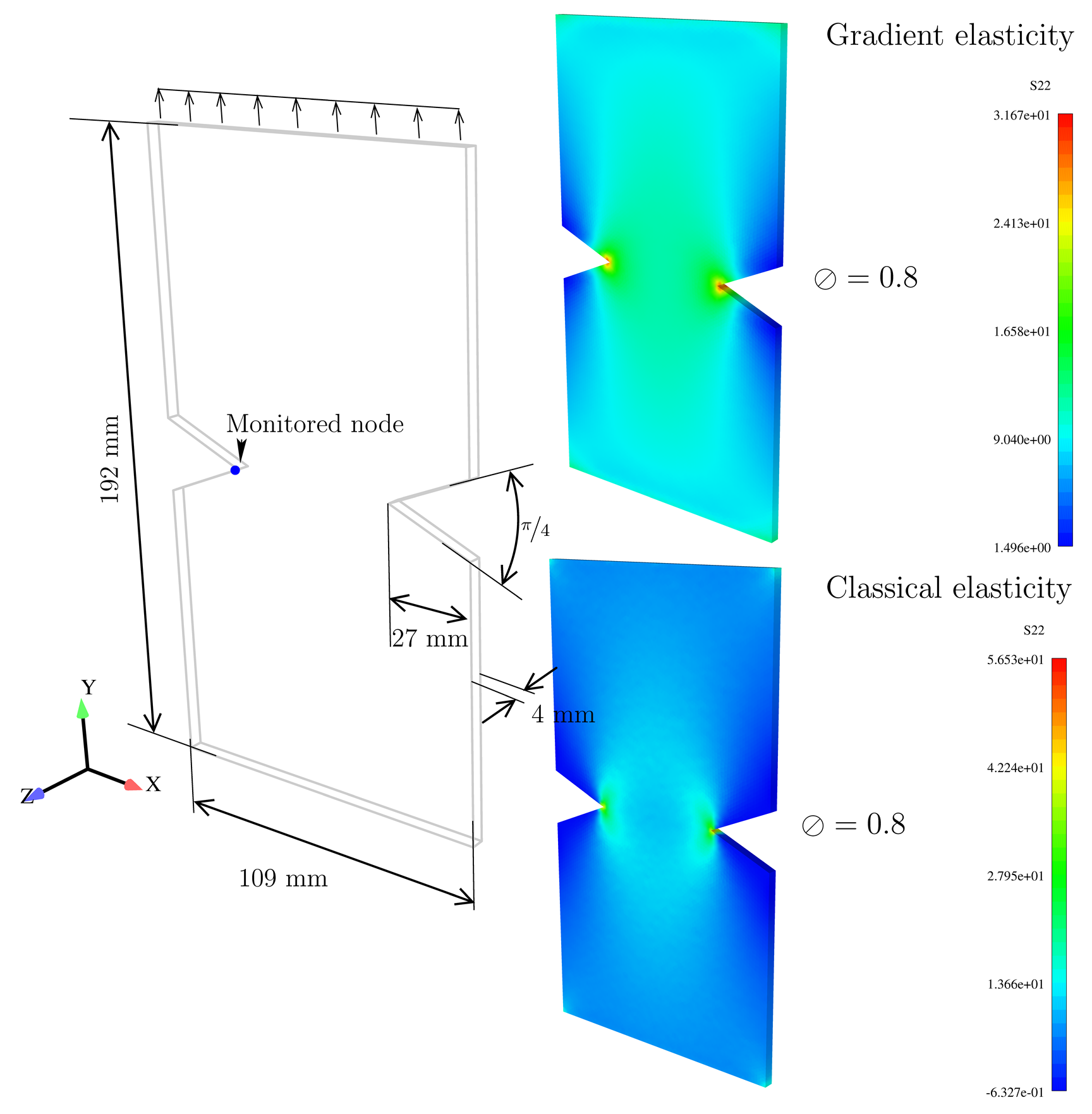
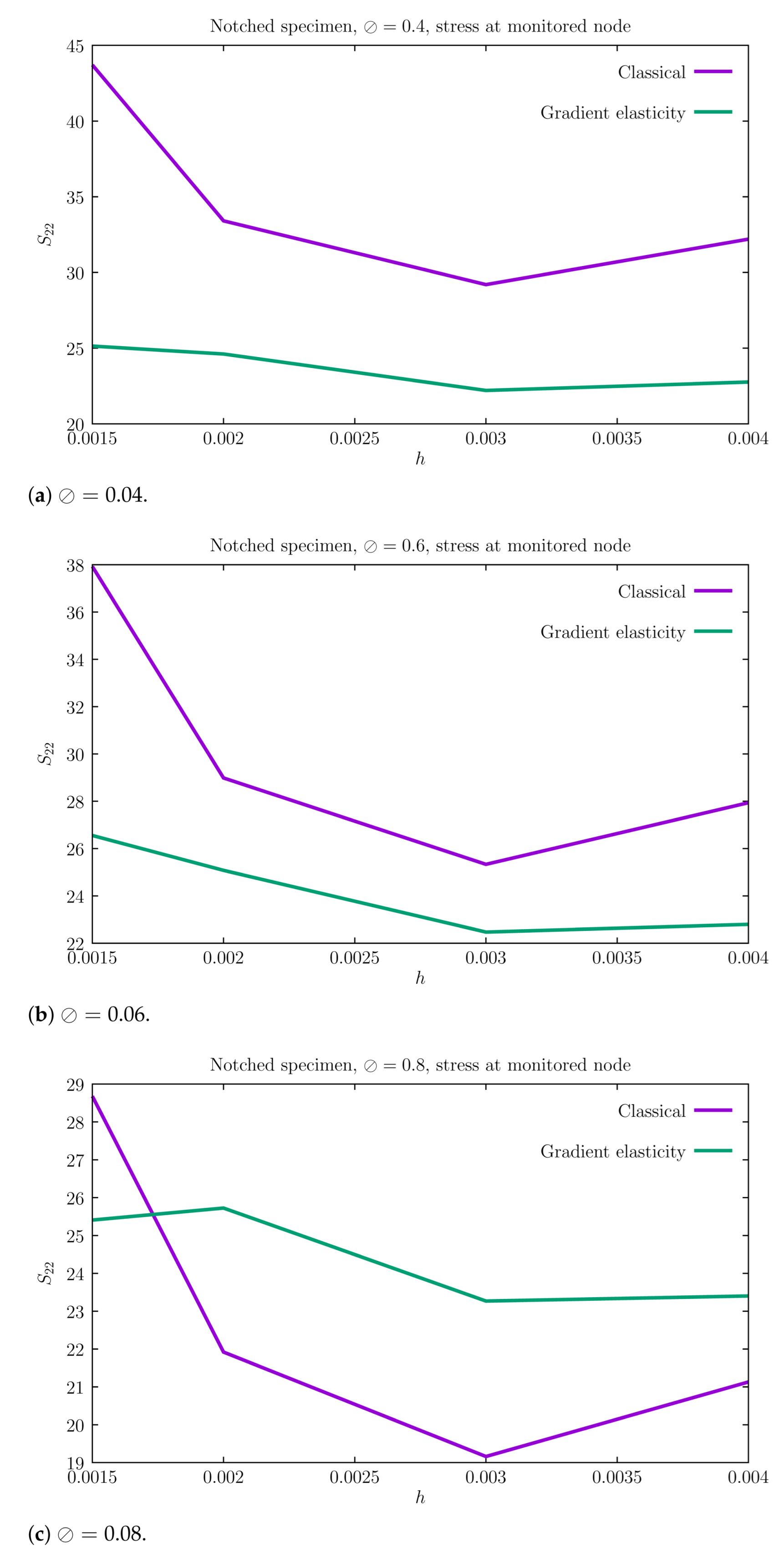
We now consider a notched specimen, as depicted in
Figure 7. It consists of a rectangular plate with two sharp notches. In terms of discretization, four point distributions with lengths
,
,
and
are tested. The goal here is to inspect the notch sensitivity when the strain gradient effect is present in the elastic law. It is known that singularities disappear in gradient solutions, and therefore discrete objectivity is to be expected. Contour plots for
are shown in
Figure 7. For the classical elasticity case, a sharper stress concentration appears at the notch and this increases with mesh refinement.
Table 5 presents the values of
at the monitored node for the aforementioned values of
h.
Table 5 reports the notch tip stress components for the two cases and the corresponding graphical representation is shown in
Figure 8. We draw the following conclusions:
Stresses converge with point refinement, in contrast with the classical elastic model, which predicts a singularity.
Lower discrepancies between finer and coarser point distributions are observed.
A very smooth stress distribution is visible in the contour plot, even at the notch tip.
7. Conclusions
In this work, we introduce a model for finite gradient elasticity, specifically a continuum containing spherical voids, using a two-stage (and two-scale) approach. In the first stage, properties for the gradient model are determined from RVE analysis using a least-squares method. Quadratic displacements are applied to the boundary of the RVE and energy equivalence is established, which results in an unique set of seven elastic properties: two for the fourth-order tensor
and five for the sixth-order tensor
. In terms of discretization, we adopt a meshless method consisting of radial basis function interpolation with polynomial enrichment and we establish both the first and second derivatives of the shape functions in closed form. Note that an FE mesh is adopted for integration purposes. Detailed expressions for the deformation gradient
and its gradient
are shown and a consistent linearization is performed to ensure the Newton solution. The source code for this work is available in Github [
27]. Validation is performed with two 3D numerical examples: the first one demonstrates the presence of size effect (i.e., the stiffening of smaller specimens) and the second example demonstrates the absence of stress singularity and hence the convergence of the discretization scheme.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}