


On New Generalized Viscosity Implicit Double Midpoint Rule for Hierarchical Problem


Abstract
:1. Introduction
2. Preliminaries
3. Main Results
4. Some Deduced Results
5. Applications and Numerical
5.1. Nonlinear Fredholm Integral Equation
5.2. Application to Convex Minimization Problem
5.3. Application to Hierarchical Minimization
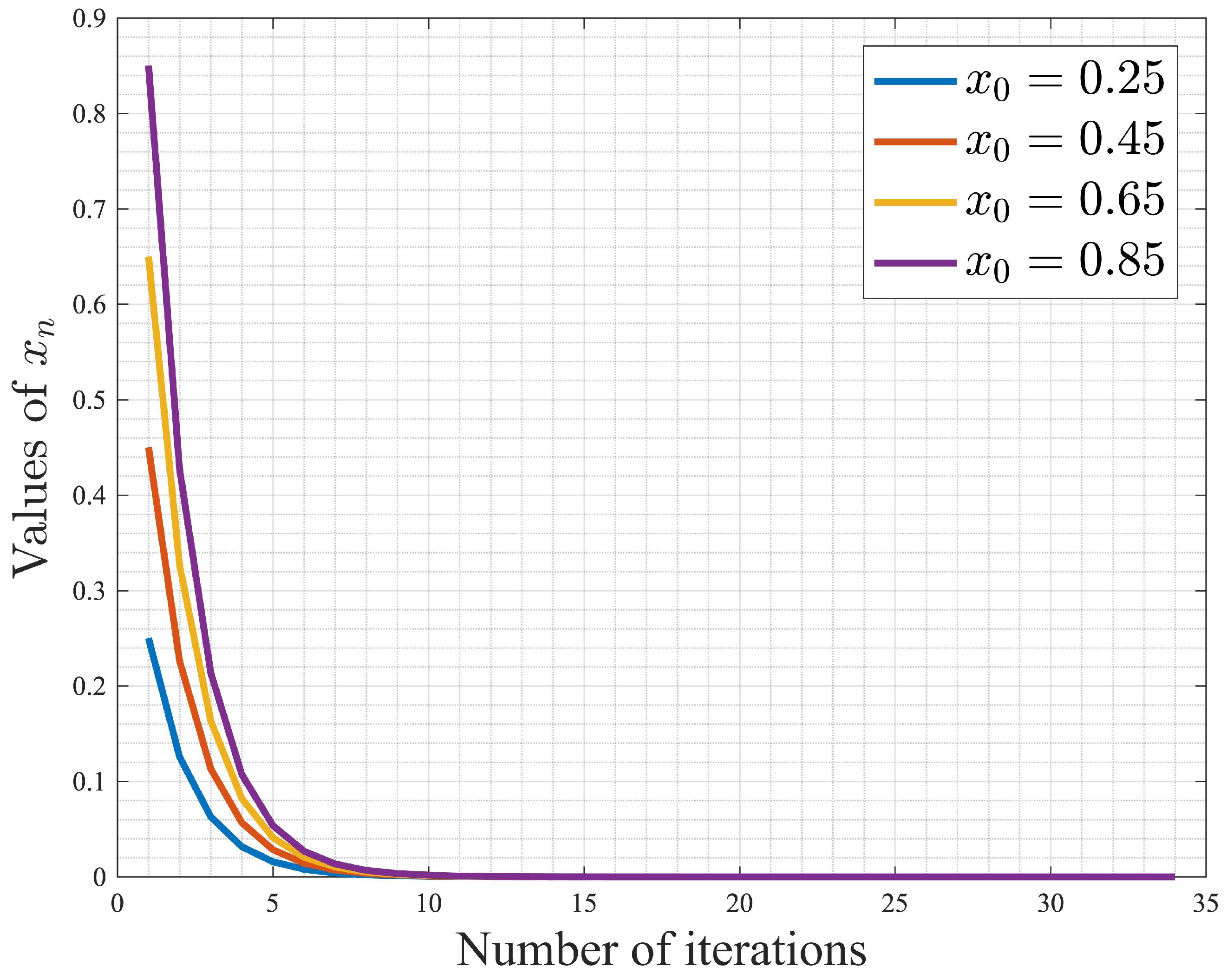
5.4. Numerical Experiments
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hartman, P.; Stampacchia, G. On some nonlinear elliptic differential functional equations. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Kirk, W.A. Fixed point theorem for mappings which do not increase distance. Am. Math. Mon. 1965, 72, 1004–1006. [Google Scholar] [CrossRef] [Green Version]
- Combettes, P.L. A block-itrative surrogate constraint splitting method for quadratic signal recovery. IEEE Trans. Signal Process. 2003, 51, 1771–1782. [Google Scholar] [CrossRef] [Green Version]
- Gu, G.; Wang, S.; Cho, Y.J. Strong convergence algorithms for hierarchical fixed points problems and variational inequalities. J. Appl. Math. 2011, 2011, 164978. [Google Scholar] [CrossRef] [Green Version]
- Hirstoaga, S.A. Iterative selection method for common fixed point problems. J. Math. Anal. Appl. 2006, 324, 1020–1035. [Google Scholar] [CrossRef] [Green Version]
- Iiduka, H.; Yamada, I. A subgradient-type method for the equilibrium problem over the fixed point set and its applications. Optimization 2009, 58, 251–261. [Google Scholar] [CrossRef]
- Marino, G.; Xu, H.K. Explicit hierarchical fixed point approach to variational inequalities. J. Optim. Theory Appl. 2011, 149, 61–78. [Google Scholar] [CrossRef]
- Pakdeerat, N.; Sitthithakerngkiet, K. Approximating methods for monotone inclusion and two variational inequality. Bangmod Int. J. Math. Comp. Sci. 2020, 6, 71–89. [Google Scholar]
- Slavakis, K.; Yamada, I. Robust wideband beamforming by the hybrid steepest descent method. J. Math. Anal. Appl. 2007, 55, 4511–4522. [Google Scholar] [CrossRef]
- Slavakis, K.; Yamada, I.; Sakaniwa, K. Computation of symmetric positive definite Toeplitz matrices by the hybrid steepest descent method. Signal Process 2003, 83, 1135–1140. [Google Scholar] [CrossRef]
- Yamada, I. The hybrid steepest descent method for the variational inequality problems over the intersection of fixed point sets of nonexpansive mappings. Inherently Parallel Algorithms Feasibility Optim. Their Appl. 2001, 8, 473–504. [Google Scholar]
- Yao, Y.; Cho, J.; Liou, Y.C. Iterative algorithms for hierarcical fixed points problems and variational inequalities. Math. Comput. Model. 2010, 52, 1697–1705. [Google Scholar] [CrossRef]
- Yao, Y.; Cho, J.; Liou, Y.C. Hierarchical convergence of an implicit double net algorithm for nonexpansive semigroups and variational inequality problems. Fixed Point Theory Appl. 2011, 2011, 101. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Cho, Y.J.; Yang, P.X. An iterative algorithm for a hierarchical problem. J. Appl. Math. 2012, 2012, 320421. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Liou, Y.C.; Chen, C.P. Hierarchical convergence of a double-net algorithm for equilibrium problems and variational inequality problems. Fixed Point Theory Appl. 2010, 2010, 642584. [Google Scholar] [CrossRef] [Green Version]
- Yamada, I.; Ogura, N. Hybrid steepest descent method for variational inequality problem over the fixed point set of certain quasi-nonexpansive mapping. Numer. Funct. Anal. Optim. 2004, 25, 619–655. [Google Scholar] [CrossRef]
- Yamada, I.; Ogura, N.; Shirakawa, N. A numerically robust hybrid steepest descent method for the convexly constrained generalized inverse problems. Am. Math. Soc. 2002, 313, 269–305. [Google Scholar]
- Yao, Y.; Liou, Y.C.; Kang, S.M. Algorithms construction for variational inequaliies. Fixed Point Theory Appl. 2011, 2011, 794203. [Google Scholar] [CrossRef] [Green Version]
- Ceng, L.C.; Ansari, Q.H.; Yao, J.C. Iterative methods for triple hierarchical variational inequalities in Hilbert spaces. J. Optim. Theory Appl. 2011, 151, 489–512. [Google Scholar] [CrossRef]
- Kumam, P.; Jitpeera, T. Strong convergence of an iterative algorithm for hierarchical problems. Abstract Appl. Anal. 2014, 2014, 678147. [Google Scholar] [CrossRef] [Green Version]
- Alghamdi, M.A.; Alghamadi, M.A.; Shahzad, N.; Xu, H.K. The implicit midpoint rule for nonexpansive mappings. Fixed Point Theory Appl. 2014, 2014, 96. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.K.; Alghamdi, M.A.; Shahzad, N. The viscosity technique for the implicit midpoint rule of nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2015, 2015, 41. [Google Scholar] [CrossRef] [Green Version]
- Dhakal, S.; Sintunavarat, W. The viscosity method for the implicit double midpoint rule with numerical results and its applications. Comput. Appl. Math. 2019, 38, 40. [Google Scholar] [CrossRef]
- Xu, H.K. Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 2002, 66, 240–256. [Google Scholar] [CrossRef]
- Goebel, K.; Kirk, W.A. Topics in Metric Fixed Point; Cambridge University Press: Cambridge, UK, 1990; Volume 28. [Google Scholar]
- Nieto, J.J.; Xu, H.K. Solvability of nonlinear Volterra and Fredholm equations in weighted spaces. Nonlinear Anal. 1995, 24, 1289–1297. [Google Scholar] [CrossRef]
- Cabot, A. Proximal point algorithm controlled by a slowly vanishing term: Applications to hierarchical minimization. SIAM J. Optim. 2005, 15, 555–572. [Google Scholar] [CrossRef]


{kind=link}
| Iterate | ||||
|---|---|---|---|---|
| 1 | 0.1255435730 | 0.2259784314 | 0.3264132898 | 0.4268481482 |
| 2 | 0.0629054853 | 0.1132298736 | 0.1635542618 | 0.2138786501 |
| 3 | 0.0314970836 | 0.0566947504 | 0.0818924172 | 0.1070900841 |
| 4 | 0.0157651322 | 0.0283772379 | 0.0409893436 | 0.0536014494 |
| 5 | 0.0078891945 | 0.0142005501 | 0.0205119057 | 0.0268232613 |
| 6 | 0.0039473573 | 0.0071052432 | 0.0102631290 | 0.0134210149 |
| 7 | 0.0019748611 | 0.0035547500 | 0.0051346389 | 0.0067145278 |
| 8 | 0.0009879478 | 0.0017783060 | 0.0025686642 | 0.0033590224 |
| 9 | 0.0004942037 | 0.0008895667 | 0.0012849297 | 0.0016802927 |
| 10 | 0.0002472053 | 0.0004449695 | 0.0006427338 | 0.0008404980 |
| 11 | 0.0001236497 | 0.0002225694 | 0.0003214891 | 0.0004204088 |
| 12 | 0.0000618464 | 0.0001113235 | 0.0001608006 | 0.0002102777 |
| 13 | 0.0000309331 | 0.0000556796 | 0.0000804262 | 0.0001051727 |
| 14 | 0.0000154712 | 0.0000278481 | 0.0000402251 | 0.0000526020 |
| 15 | 0.0000077377 | 0.0000139279 | 0.0000201181 | 0.0000263083 |
| 16 | 0.0000038699 | 0.0000069658 | 0.0000100617 | 0.0000131576 |
| 17 | 0.0000019354 | 0.0000034838 | 0.0000050321 | 0.0000065804 |
| 18 | 0.0000009679 | 0.0000017423 | 0.0000025166 | 0.0000032910 |
| 19 | 0.0000004841 | 0.0000008713 | 0.0000012586 | 0.0000016458 |
| 20 | 0.0000002421 | 0.0000004358 | 0.0000006294 | 0.0000008231 |
| 21 | 0.0000001211 | 0.0000002179 | 0.0000003148 | 0.0000004116 |
| 22 | 0.0000000605 | 0.0000001090 | 0.0000001574 | 0.0000002059 |
| 23 | 0.0000000303 | 0.0000000545 | 0.0000000787 | 0.0000001029 |
| 24 | 0.0000000151 | 0.0000000273 | 0.0000000394 | 0.0000000515 |
| 25 | 0.0000000076 | 0.0000000136 | 0.0000000197 | 0.0000000257 |
| 26 | 0.0000000038 | 0.0000000068 | 0.0000000098 | 0.0000000129 |
| 27 | 0.0000000019 | 0.0000000034 | 0.0000000049 | 0.0000000064 |
| 28 | 0.0000000009 | 0.0000000017 | 0.0000000025 | 0.0000000032 |
| 29 | 0.0000000005 | 0.0000000009 | 0.0000000012 | 0.0000000016 |
| 30 | 0.0000000002 | 0.0000000004 | 0.0000000006 | 0.0000000008 |
| 31 | 0.0000000001 | 0.0000000002 | 0.0000000003 | 0.0000000004 |
| 32 | 0.0000000001 | 0.0000000001 | 0.0000000002 | 0.0000000002 |
| 33 | 0.0000000001 | 0.0000000001 | 0.0000000001 | 0.0000000001 |
| 34 | 0.0000000001 | 0.0000000001 | 0.0000000001 | 0.0000000001 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jitpeera, T.; Padcharoen, A.; Kumam, W. On New Generalized Viscosity Implicit Double Midpoint Rule for Hierarchical Problem. Mathematics 2022, 10, 4755. https://doi.org/10.3390/math10244755
Jitpeera T, Padcharoen A, Kumam W. On New Generalized Viscosity Implicit Double Midpoint Rule for Hierarchical Problem. Mathematics. 2022; 10(24):4755. https://doi.org/10.3390/math10244755
Chicago/Turabian StyleJitpeera, Thanyarat, Anantachai Padcharoen, and Wiyada Kumam. 2022. "On New Generalized Viscosity Implicit Double Midpoint Rule for Hierarchical Problem" Mathematics 10, no. 24: 4755. https://doi.org/10.3390/math10244755
APA StyleJitpeera, T., Padcharoen, A., & Kumam, W. (2022). On New Generalized Viscosity Implicit Double Midpoint Rule for Hierarchical Problem. Mathematics, 10(24), 4755. https://doi.org/10.3390/math10244755