
Adaptive Evolutionary Computation for Nonlinear Hammerstein Control Autoregressive Systems with Key Term Separation Principle

 , ,
, ,  and
and
Abstract
:1. Introduction
- A global search identification scheme through the integration of key term separation, KTS principle identification model with the evolutionary computing algorithm of GA is presented for parameter estimation of Hammerstein nonlinear systems.
- The proposed scheme avoids identifying redundant parameters and effectively estimates only the actual parameters of Hammerstein control autoregressive (HC-AR) systems through minimizing the mean square error-based criterion function.
- The accuracy, robustness, and convergence of the proposed approach is established through optimal values of estimation-error-based evaluation metrics.
- The stability and reliability of the designed approach is ascertained through statistical inferences obtained after executing multiple independent trials of the scheme.
2. Key Term Separation Identification Model
3. Proposed Methodology for KTS System Model
3.1. Fitness Function Formulation
3.2. Optimization Procedure: Evolutionary Computing Paradigm
| Algorithm 1: Pseudocode of evolutionary computing with GAs for HC-AR system identification. |
| Start: Evolutionary computing of genetic algorithms (GAs) |
| Inputs: Chromosomes or individual representation as follows: |
| Population for an ensemble of chromosomes or individuals is given as |
| for l members in θ in P |
| Output: Global Best θ in P |
| BeginGAs |
| //Initialize |
| Arbitrarily formulate θ with bounded pseudo real numbers. |
| A group of l number of θ represents initial P. |
| //Termination/Stoppage Criteria |
| Set stoppage of execution of GAs for the following conditions: |
| Desire fitness attained i.e., δ → 10−16, |
| Fitness function-Tolerance attained i.e., TolFun → 10−20, |
| Constrained-Tolerance attained, i.e., TolCon → 10−20, |
| Set total number of generations = 600, |
| Other default of GA routine in optimization toolbox |
| //Main loop of GA |
| While {until termination conditions attained} do % |
| //Fitness calculation step |
| Evaluate δ using Expression (14) and repeat the procedure for each θ in P |
| //Check for termination requirements |
| If any of termination level attained then go out of the while loop |
| else continues |
| //Ranking of individual step |
| Rank each θ on the basis of quality of fitness θ achieved. |
| //Reproduction step through GA operators |
| Appropriate/suitable invoking for |
| selection (Stochastic uniform via routine ‘@selectionstochunif’), |
| crossover (heuristics via rountine ‘@crossoverheuristic’), |
| mutations (adaptive feasible via routine ‘@mutationadaptfeasible’) |
| Elitism operations up to 5%, i.e., elitism count set as 26 best ranking |
| individuals in the population P |
| Modify/update P and go to fitness calculation step |
| End |
| //Storage step of GAs outcomes |
| Store the global best θ with credentials of fitness attained, time spent, |
| generations exectuted and fitness function counts of the algorithm. |
| EndGAs |
| StatisticalAnalysis: |
| Dataset generation for the statistical observation by repetition of GAs for a sufficiently large number of multiple execution to identify the parameters of the HC-AR and analysis of these datasets was performed for exhaustive assessments. |
3.3. Evaluation Metrics
4. Results of Numerical Experimentation with Discussion
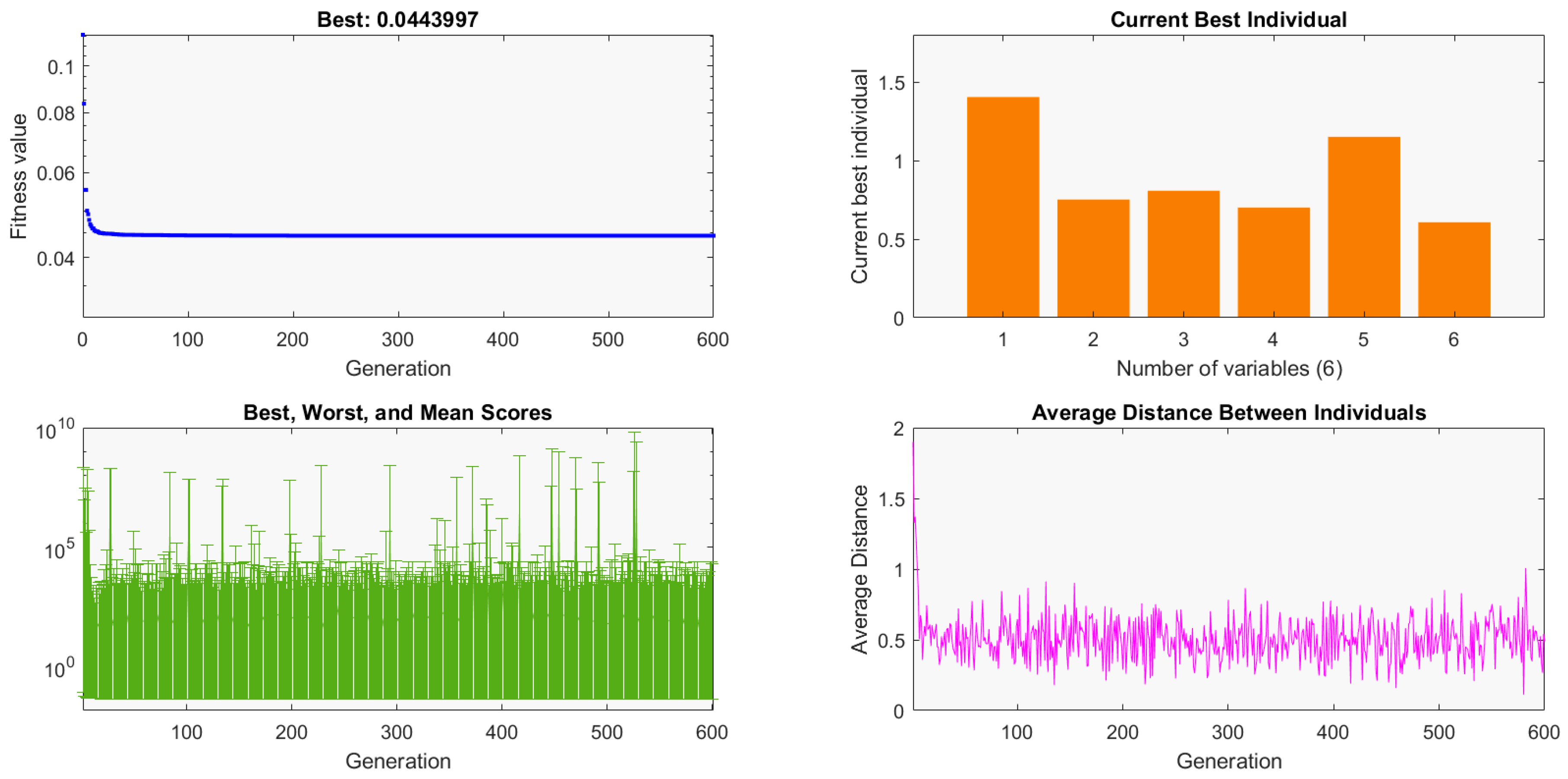
4.1. Problem 1
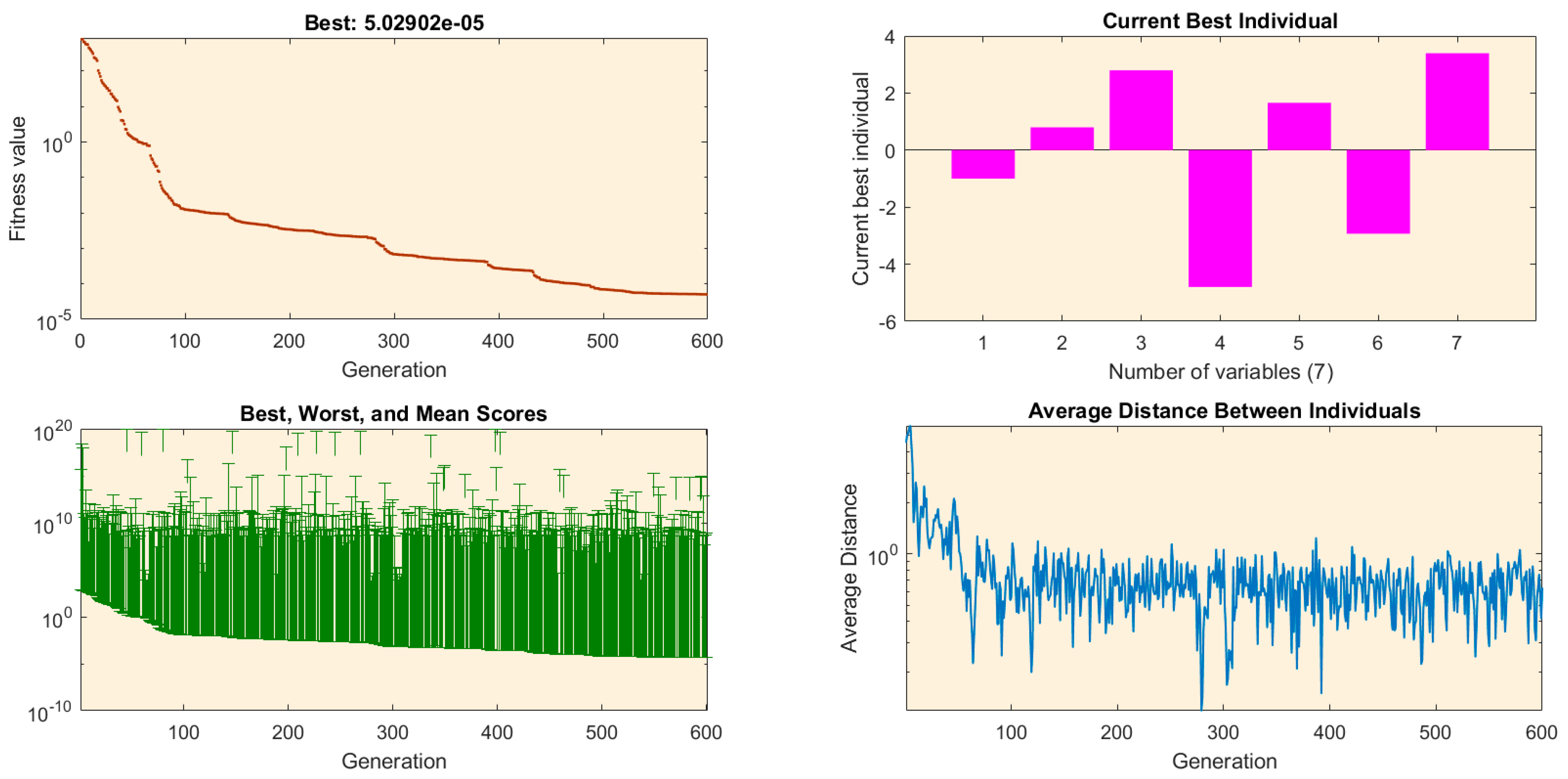
4.2. Problem 2
5. Conclusions
- The integration of an evolutionary computing paradigm of genetic algorithms, GA, with a key term separation-based identification model was presented for parameter estimation of Hammerstein control autoregressive (HC-AR) systems.
- The proposed identification scheme effectively estimated only the actual parameters of the HC-AR system without estimating the redundant parameters due to an overparameterization approach.
- The accurate and convergent behavior of the proposed strategy was ascertained through achieving an optimal value of different evaluation metrics based on response error and parameter estimation error.
- The results of the Monte Carlo simulations and statistical indices established the consistent accuracy of the proposed scheme.
- The accurate estimation of HC-AR parameters representing the dynamics of a muscle model for the rehabilitation of paralyzed muscles further endorsed the efficacy of the design approach.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bock, H.G.; Carraro, T.; Jäger, W.; Körkel, S.; Rannacher, R.; Schlöder, J.P. (Eds.) Model Based Parameter Estimation: Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 4. [Google Scholar]
- Chaudhary, N.I.; Latif, R.; Raja, M.A.Z.; Machado, J.T. An innovative fractional order LMS algorithm for power signal parameter estimation. Appl. Math. Model. 2020, 83, 703–718. [Google Scholar] [CrossRef]
- Ćalasan, M.; Micev, M.; Ali, Z.M.; Zobaa, A.F.; Abdel Aleem, S.H. Parameter Estimation of Induction Machine Single-Cage and Double-Cage Models Using a Hybrid Simulated Annealing—Evaporation Rate Water Cycle Algorithm. Mathematics 2020, 8, 1024. [Google Scholar] [CrossRef]
- Billings, S.A.; Leontaritis, I.J. Parameter estimation techniques for nonlinear systems. IFAC Proc. Vol. 1982, 15, 505–510. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Wang, H.; Wang, X.; Liang, B. Leakage-type adaptive state and disturbance observers for uncertain nonlinear systems. Nonlinear Dyn. 2021, 105, 2299–2311. [Google Scholar] [CrossRef]
- Fei, J.; Feng, Z. Fractional-order finite-time super-twisting sliding mode control of micro gyroscope based on double-loop fuzzy neural network. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7692–7706. [Google Scholar] [CrossRef]
- Fei, J.; Wang, Z.; Liang, X.; Feng, Z.; Xue, Y. Fractional sliding mode control for micro gyroscope based on multilayer recurrent fuzzy neural network. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Morales, J.Y.R.; Mendoza, J.A.B.; Torres, G.O.; Vázquez, F.D.J.S.; Rojas, A.C.; Vidal, A.F.P. Fault-Tolerant Control implemented to Hammerstein–Wiener model: Application to Bio-ethanol dehydration. Fuel 2022, 308, 121836. [Google Scholar] [CrossRef]
- Janczak, A. Identification of Nonlinear Systems Using Neural Networks and Polynomial Models: A Block-Oriented Approach; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2004; Volume 310. [Google Scholar]
- Billings, S.A. Nonlinear System Identification: NARMAX Methods in the Time, Frequency, and Spatio-Temporal Domains; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Dong, S.; Liu, T.; Wang, Q.G. Identification of Hammerstein systems with time delay under load disturbance. IET Control Theory Appl. 2018, 12, 942–952. [Google Scholar] [CrossRef]
- Tehrani, E.S.; Golkar, M.A.; Guarin, D.L.; Jalaleddini, K.; Kearney, R.E. Methods for the identification of time-varying hammerstein systems with applications to the study of dynamic joint stiffness. IFAC-PapersOnLine 2015, 48, 1023–1028. [Google Scholar] [CrossRef]
- Hammar, K.; Djamah, T.; Bettayeb, M. Identification of fractional Hammerstein system with application to a heating process. Nonlinear Dyn. 2019, 96, 2613–2626. [Google Scholar] [CrossRef]
- Janjanam, L.; Saha, S.K.; Kar, R.; Mandal, D. Improving the Modelling Efficiency of Hammerstein System using Kalman Filter and its Parameters Optimised using Social Mimic Algorithm: Application to Heating and Cascade Water Tanks. J. Frankl. Inst. 2022, 359, 1239–1273. [Google Scholar] [CrossRef]
- Piao, H.; Cheng, D.; Chen, C.; Wang, Y.; Wang, P.; Pan, X. A High Accuracy CO2 Carbon Isotope Sensing System Using Subspace Identification of Hammerstein Model for Geochemical Application. IEEE Trans. Instrum. Meas. 2021, 71, 1–9. [Google Scholar] [CrossRef]
- Ai, Q.; Peng, Y.; Zuo, J.; Meng, W.; Liu, Q. Hammerstein model for hysteresis characteristics of pneumatic muscle actuators. Int. J. Intell. Robot. Appl. 2019, 3, 33–44. [Google Scholar] [CrossRef]
- Tissaoui, K. Forecasting implied volatility risk indexes: International evidence using Hammerstein-ARX approach. Int. Rev. Financ. Anal. 2019, 64, 232–249. [Google Scholar] [CrossRef]
- Zhang, Z.; Hong, W.C. Electric load forecasting by complete ensemble empirical mode decomposition adaptive noise and support vector regression with quantum-based dragonfly algorithm. Nonlinear Dyn. 2019, 98, 1107–1136. [Google Scholar] [CrossRef]
- Mehmood, A.; Zameer, A.; Chaudhary, N.I.; Raja, M.A.Z. Backtracking search heuristics for identification of electrical muscle stimulation models using Hammerstein structure. Appl. Soft Comput. 2019, 84, 105705. [Google Scholar] [CrossRef]
- Mehmood, A.; Zameer, A.; Chaudhary, N.I.; Ling, S.H.; Raja, M.A.Z. Design of meta-heuristic computing paradigms for Hammerstein identification systems in electrically stimulated muscle models. Neural Comput. Appl. 2020, 32, 12469–12497. [Google Scholar] [CrossRef]
- Mao, Y.; Ding, F.; Xu, L.; Hayat, T. Highly efficient parameter estimation algorithms for Hammerstein non-linear systems. IET Control Theory Appl. 2019, 13, 477–485. [Google Scholar] [CrossRef]
- Ding, F.; Chen, H.; Xu, L.; Dai, J.; Li, Q.; Hayat, T. A hierarchical least squares identification algorithm for Hammerstein nonlinear systems using the key term separation. J. Frankl. Inst. 2018, 355, 3737–3752. [Google Scholar] [CrossRef]
- Ding, F.; Ma, H.; Pan, J.; Yang, E. Hierarchical gradient-and least squares-based iterative algorithms for input nonlinear output-error systems using the key term separation. J. Frankl. Inst. 2021, 358, 5113–5135. [Google Scholar] [CrossRef]
- Shen, B.; Ding, F.; Xu, L.; Hayat, T. Data filtering based multi-innovation gradient identification methods for feedback nonlinear systems. Int. J. Control Autom. Syst. 2018, 16, 2225–2234. [Google Scholar] [CrossRef]
- Ding, J.; Cao, Z.; Chen, J.; Jiang, G. Weighted parameter estimation for Hammerstein nonlinear ARX systems. Circuits Syst. Signal Process. 2020, 39, 2178–2192. [Google Scholar] [CrossRef]
- Chaudhary, N.I.; Raja, M.A.Z.; He, Y.; Khan, Z.A.; Machado, J.T. Design of multi innovation fractional LMS algorithm for parameter estimation of input nonlinear control autoregressive systems. Appl. Math. Model. 2021, 93, 412–425. [Google Scholar] [CrossRef]
- Chaudhary, N.I.; Aslam, M.S.; Baleanu, D.; Raja, M.A.Z. Design of sign fractional optimization paradigms for parameter estimation of nonlinear Hammerstein systems. Neural Comput. Appl. 2020, 32, 8381–8399. [Google Scholar] [CrossRef]
- Xu, C.; Mao, Y. Auxiliary Model-Based Multi-Innovation Fractional Stochastic Gradient Algorithm for Hammerstein Output-Error Systems. Machines 2021, 9, 247. [Google Scholar] [CrossRef]
- Chaudhary, N.I.; Zubair, S.; Raja, M.A.Z.; Dedovic, N. Normalized fractional adaptive methods for nonlinear control autoregressive systems. Appl. Math. Model. 2019, 66, 457–471. [Google Scholar] [CrossRef]
- Li, J. Parameter estimation for Hammerstein CARARMA systems based on the Newton iteration. Appl. Math. Lett. 2013, 26, 91–96. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Ding, F.; Xiong, W.; Yang, E. Combined state and parameter estimation for Hammerstein systems with time delay using the Kalman filtering. Int. J. Adapt. Control Signal Process. 2017, 31, 1139–1151. [Google Scholar] [CrossRef] [Green Version]
- Wang, D. Hierarchical parameter estimation for a class of MIMO Hammerstein systems based on the reframed models. Appl. Math. Lett. 2016, 57, 13–19. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, Z.; Xue, B. Decoupled parameter estimation methods for Hammerstein systems by using filtering technique. IEEE Access 2018, 6, 66612–66620. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, D.; Liu, F. Separate block-based parameter estimation method for Hammerstein systems. R. Soc. Open Sci. 2018, 5, 172194. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Zheng, W.X.; Gu, J.; Hua, L. Parameter estimation algorithms for Hammerstein output error systems using Levenberg–Marquardt optimization method with varying interval measurements. J. Frankl. Inst. 2017, 354, 316–331. [Google Scholar] [CrossRef]
- Mao, Y.; Ding, F.; Liu, Y. Parameter estimation algorithms for Hammerstein time-delay systems based on the orthogonal matching pursuit scheme. IET Signal Process. 2017, 11, 265–274. [Google Scholar] [CrossRef]
- Wang, D.Q.; Zhang, Z.; Yuan, J.Y. Maximum likelihood estimation method for dual-rate Hammerstein systems. Int. J. Control Autom. Syst. 2017, 15, 698–705. [Google Scholar] [CrossRef]
- Mehmood, A.; Aslam, M.S.; Chaudhary, N.I.; Zameer, A.; Raja, M.A.Z. Parameter estimation for Hammerstein control autoregressive systems using differential evolution. Signal Image Video Process. 2018, 12, 1603–1610. [Google Scholar] [CrossRef]
- Mehmood, A.; Chaudhary, N.I.; Zameer, A.; Raja, M.A.Z. Backtracking search optimization heuristics for nonlinear Hammerstein controlled auto regressive auto regressive systems. ISA Trans. 2019, 91, 99–113. [Google Scholar] [CrossRef] [PubMed]
- Mehmood, A.; Chaudhary, N.I.; Zameer, A.; Raja, M.A.Z. Novel computing paradigms for parameter estimation in Hammerstein controlled auto regressive auto regressive moving average systems. Appl. Soft Comput. 2019, 80, 263–284. [Google Scholar] [CrossRef]
- Tariq, H.B.; Chaudhary, N.I.; Khan, Z.A.; Raja MA, Z.; Cheema, K.M.; Milyani, A.H. Maximum-Likelihood-Based Adaptive and Intelligent Computing for Nonlinear System Identification. Mathematics 2021, 9, 3199. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Shah, A.A.; Mehmood, A.; Chaudhary, N.I.; Aslam, M.S. Bio-inspired computational heuristics for parameter estimation of nonlinear Hammerstein controlled autoregressive system. Neural Comput. Appl. 2018, 29, 1455–1474. [Google Scholar] [CrossRef]
- Chaudhary, N.I.; Raja, M.A.Z.; Khan, Z.A.; Cheema, K.M.; Milyani, A.H. Hierarchical Quasi-Fractional Gradient Descent Method for Parameter Estimation of Nonlinear ARX Systems Using Key Term Separation Principle. Mathematics 2021, 9, 3302. [Google Scholar] [CrossRef]
- Giri, F.; Bai, E.W. Block-Oriented Nonlinear System Identification, 1st ed.; Springer: London, UK, 2010; Volume 1. [Google Scholar]
- Holland, J.H. Genetic algorithms and the optimal allocation of trials. SIAM J. Comput. 1973, 2, 88–105. [Google Scholar] [CrossRef]
- Yun, Y.; Chuluunsukh, A.; Gen, M. Sustainable closed-loop supply chain design problem: A hybrid genetic algorithm approach. Mathematics 2020, 8, 84. [Google Scholar] [CrossRef] [Green Version]
- Sabir, Z.; Raja, M.A.Z.; Botmart, T.; Weera, W. A Neuro-Evolution Heuristic Using Active-Set Techniques to Solve a Novel Nonlinear Singular Prediction Differential Model. Fractal Fract. 2022, 6, 29. [Google Scholar] [CrossRef]
- Vijayanand, M.; Varahamoorthi, R.; Kumaradhas, P.; Sivamani, S.; Kulkarni, M.V. Regression-BPNN modelling of surfactant concentration effects in electroless NiB coating and optimization using genetic algorithm. Surf. Coat. Technol. 2021, 409, 126878. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Hu, E.T.; Cai, Q.Y.; Wang, J.; Tu, H.T.; Yu, K.H.; Chen, L.Y.; Wei, W. Accurate design of solar selective absorber based on measured optical constants of nano-thin Cr Film. Coatings 2020, 10, 938. [Google Scholar] [CrossRef]
- Yu, J.; Sun, W.; Huang, H.; Wang, W.; Wang, Y.; Hu, Y. Crack sensitivity control of nickel-based laser coating based on genetic algorithm and neural network. Coatings 2019, 9, 728. [Google Scholar] [CrossRef] [Green Version]
- Le, F.; Markovsky, I.; Freeman, C.T.; Rogers, E. Recursive identification of Hammerstein systems with application to electrically stimulated muscle. Control Eng. Pract. 2012, 20, 386–396. [Google Scholar] [CrossRef] [Green Version]
- Cao, W.; Zhu, Q. Stability of stochastic nonlinear delay systems with delayed impulses. Appl. Math. Comput. 2022, 421, 126950. [Google Scholar] [CrossRef]
- Kong, F.; Zhu, Q.; Huang, T. New Fixed-Time Stability Criteria of Time-Varying Delayed Discontinuous Systems and Application to Discontinuous Neutral-Type Neural Networks. IEEE Trans. Cybern. 2021, 1–10. [Google Scholar] [CrossRef]
- Aadhithiyan, S.; Raja, R.; Zhu, Q.; Alzabut, J.; Niezabitowski, M.; Lim, C.P. A Robust Non-Fragile Control Lag Synchronization for Fractional Order Multi-Weighted Complex Dynamic Networks with Coupling Delays. Neural Process. Lett. 2022, 1–22. [Google Scholar] [CrossRef]
- Kong, F.; Zhu, Q.; Huang, T. Improved Fixed-Time Stability Lemma of Discontinuous System and Its Application. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 69, 835–842. [Google Scholar] [CrossRef]
- Xiao, H.; Zhu, Q. Stability analysis of switched stochastic delay system with unstable subsystems. Nonlinear Anal. Hybrid Syst. 2021, 42, 101075. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise | Statistical Indices | MSE Responses | MSE Parameters | NPD |
|---|---|---|---|---|
| 0 | Minimum | 1.8583 × 10−14 | 2.1427 × 10−17 | 3.5541 × 10−7 |
| Mean | 7.4405 × 10−17 | 8.0612 × 10−6 | 2.0806 × 10−3 | |
| Standard Deviation | 2.6148 × 10−6 | 3.6142 × 10−5 | 5.0126 × 10−3 | |
| 0.01 | Minimum | 4.9615 × 10−5 | 6.2525 × 10−5 | 8.1884 × 10−3 |
| Mean | 3.0590 × 10−4 | 2.8981 × 10−3 | 4.7970 × 10−2 | |
| Standard Deviation | 2.0307 × 10−4 | 4.3865 × 10−3 | 2.8608 × 10−2 | |
| 0.1 | Minimum | 1.7040 × 10−3 | 1.4920 × 10−2 | 1.2649 × 10−1 |
| Mean | 1.7138 × 10−2 | 1.4764 × 10−1 | 3.6962 × 10−1 | |
| Standard Deviation | 1.3315 × 10−2 | 1.1119 × 10−1 | 1.4840 × 10−1 |
| Metric | Noise | Metric Value | ||||||
|---|---|---|---|---|---|---|---|---|
| MSE | 0 | 1.6000 | 0.8000 | 0.8500 | 0.6500 | 1.0000 | 0.5000 | 2.14 × 10−17 |
| 0.01 | 1.5934 | 0.7972 | 0.8534 | 0.6614 | 1.0101 | 0.5089 | 6.25 × 10−5 | |
| 0.1 | 1.7468 | 0.9828 | 0.9678 | 0.7525 | 1.0791 | 0.5626 | 1.49 × 10−2 | |
| NWD | 0 | 1.6000 | 0.8000 | 0.8500 | 0.6500 | 1.0000 | 0.5000 | 3.55 × 10−7 |
| 0.01 | 1.5934 | 0.7972 | 0.8534 | 0.6614 | 1.0101 | 0.5089 | 8.19 × 10−3 | |
| 0.1 | 1.7468 | 0.9828 | 0.9678 | 0.7525 | 1.0791 | 0.5626 | 1.26 × 10−1 | |
| DW | 1.6000 | 0.8000 | 0.8500 | 0.6500 | 1.0000 | 0.5000 | 0 |
| Metric | Noise | Value | |||||||
|---|---|---|---|---|---|---|---|---|---|
| MSE | 0 | −1.0001 | 0.8000 | 2.7942 | −4.7928 | 1.6636 | −2.9094 | 3.4155 | 4.88 × 10−5 |
| 0.001 | −0.9999 | 0.8001 | 2.7836 | −4.7786 | 1.7292 | −2.8884 | 3.4251 | 4.64 × 10−4 | |
| 0.01 | −1.0001 | 0.8000 | 2.7912 | −4.7903 | 1.6224 | −2.9880 | 3.3795 | 2.40 × 10−3 | |
| NWD | 0 | −1.0001 | 0.8000 | 2.7942 | −4.7928 | 1.6636 | −2.9094 | 3.4155 | 4.73 × 10−3 |
| 0.001 | −0.9999 | 0.8001 | 2.7836 | −4.7786 | 1.7292 | −2.8884 | 3.4251 | 7.66 × 10−3 | |
| 0.01 | −1.0001 | 0.8000 | 2.7912 | −4.7903 | 1.6224 | −2.9880 | 3.3795 | 1.74 × 10−2 | |
| DW | −1.0000 | 0.8000 | 2.8000 | −4.8000 | 1.6800 | −2.8800 | 3.4200 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altaf, F.; Chang, C.-L.; Chaudhary, N.I.; Raja, M.A.Z.; Cheema, K.M.; Shu, C.-M.; Milyani, A.H. Adaptive Evolutionary Computation for Nonlinear Hammerstein Control Autoregressive Systems with Key Term Separation Principle. Mathematics 2022, 10, 1001. https://doi.org/10.3390/math10061001
Altaf F, Chang C-L, Chaudhary NI, Raja MAZ, Cheema KM, Shu C-M, Milyani AH. Adaptive Evolutionary Computation for Nonlinear Hammerstein Control Autoregressive Systems with Key Term Separation Principle. Mathematics. 2022; 10(6):1001. https://doi.org/10.3390/math10061001
Chicago/Turabian StyleAltaf, Faisal, Ching-Lung Chang, Naveed Ishtiaq Chaudhary, Muhammad Asif Zahoor Raja, Khalid Mehmood Cheema, Chi-Min Shu, and Ahmad H. Milyani. 2022. "Adaptive Evolutionary Computation for Nonlinear Hammerstein Control Autoregressive Systems with Key Term Separation Principle" Mathematics 10, no. 6: 1001. https://doi.org/10.3390/math10061001
APA StyleAltaf, F., Chang, C. -L., Chaudhary, N. I., Raja, M. A. Z., Cheema, K. M., Shu, C. -M., & Milyani, A. H. (2022). Adaptive Evolutionary Computation for Nonlinear Hammerstein Control Autoregressive Systems with Key Term Separation Principle. Mathematics, 10(6), 1001. https://doi.org/10.3390/math10061001