
On Optimal Settings for a Family of Runge–Kutta-Based Power-Flow Solvers Suitable for Large-Scale Ill-Conditioned Cases

 ,
,  ,
, 
 and
and 
Abstract
:1. Introduction
1.1. Context and Motivation
1.2. Literature Review
1.3. Contributions and Paper Organization
2. PF Solution Using Two-Stage RK-Based Solvers
- PQ buses: are normally load buses in which the voltage angle and magnitude are unknown, and the active (P) and reactive (Q) power injections are known.
- PV buses: are normally generator buses in which the voltage angle is unknown, the active (P) power injection and the voltage angle (V) are known, and the reactive power injection is an independent variable.
- Slack: one or various buses in the system have their voltage fixed, while the power injections are dependent variables.
3. Optimal Settings for Two-Stage RK-Based PF Solvers
- Sink: if all the eigenvalues of the Jacobian of have a negative real part.
- Source: if all the eigenvalues of the Jacobian of have a positive real part.
3.1. Order of Convergence
- The mapping (6) achieves 4th order of convergence if ;
- The mapping (6) achieves 3rd order of convergence if ;
- The mapping (6) achieves 2nd order of convergence if ;
- Convergence rate of (6) is linear if .
3.2. Numerical Stability
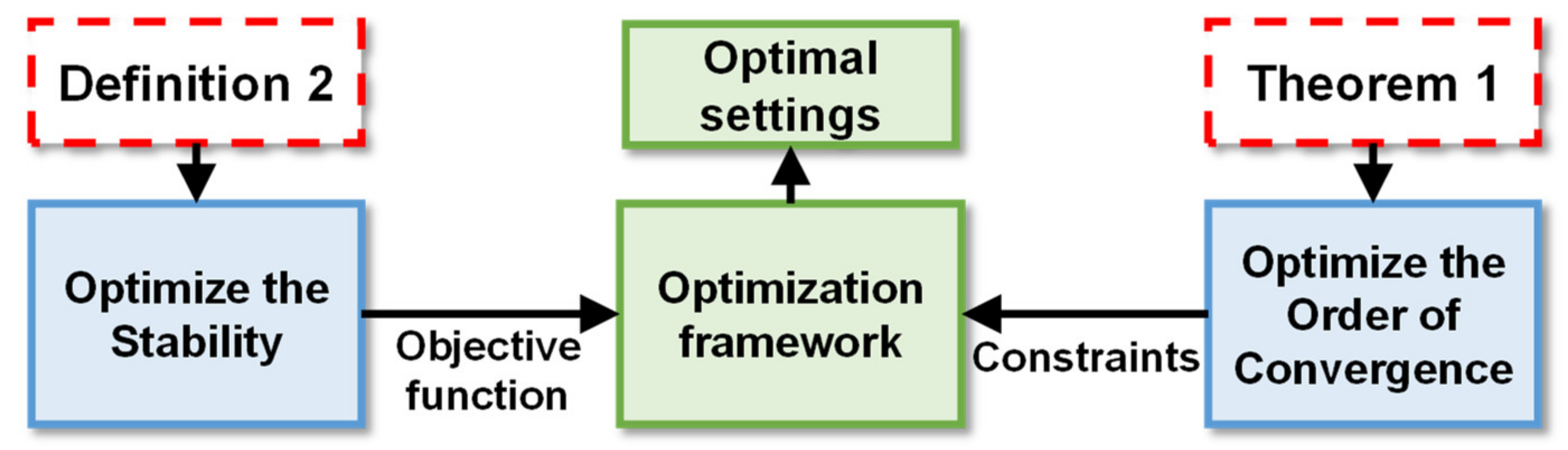
3.3. Optimal Setting for Parameters
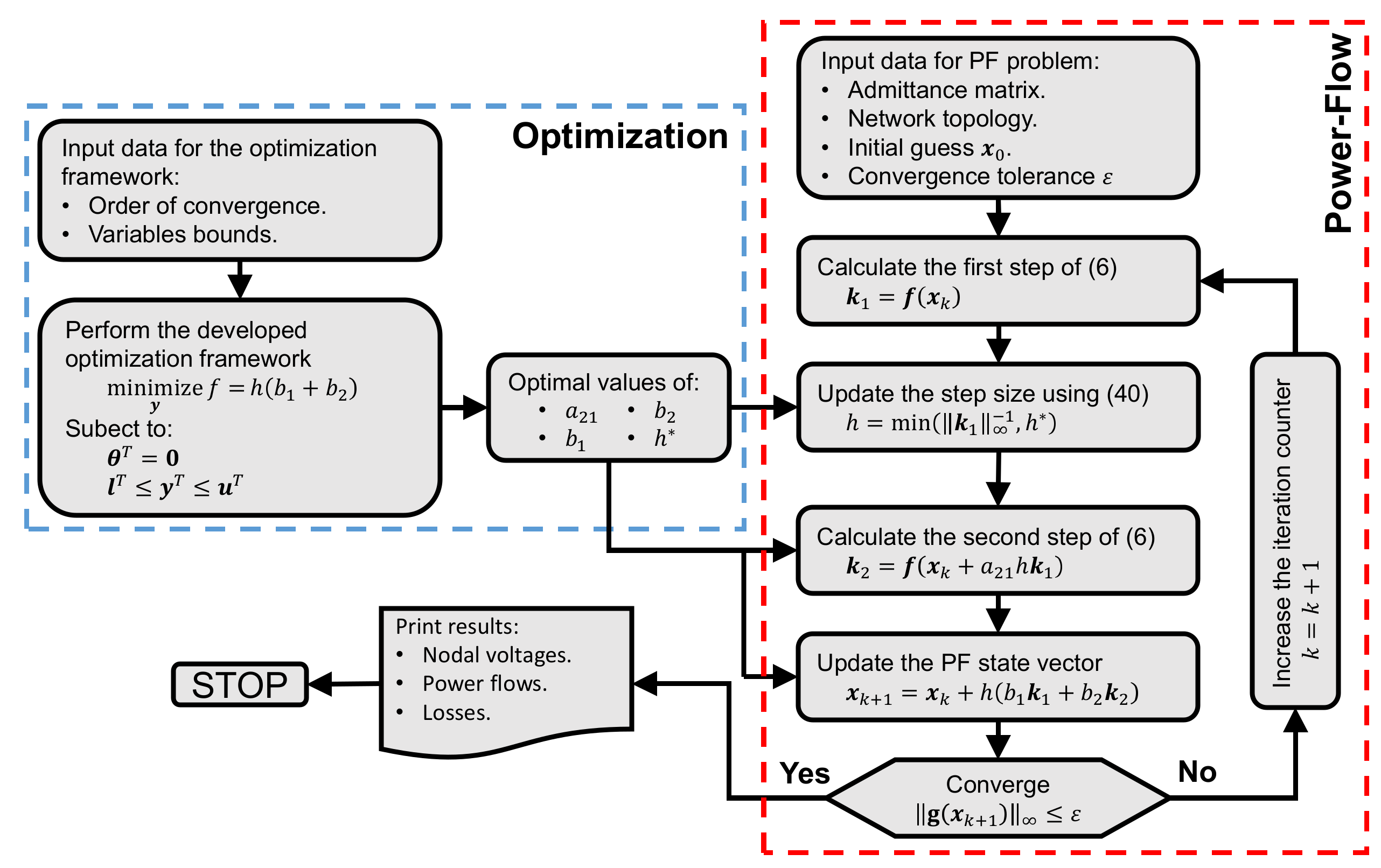
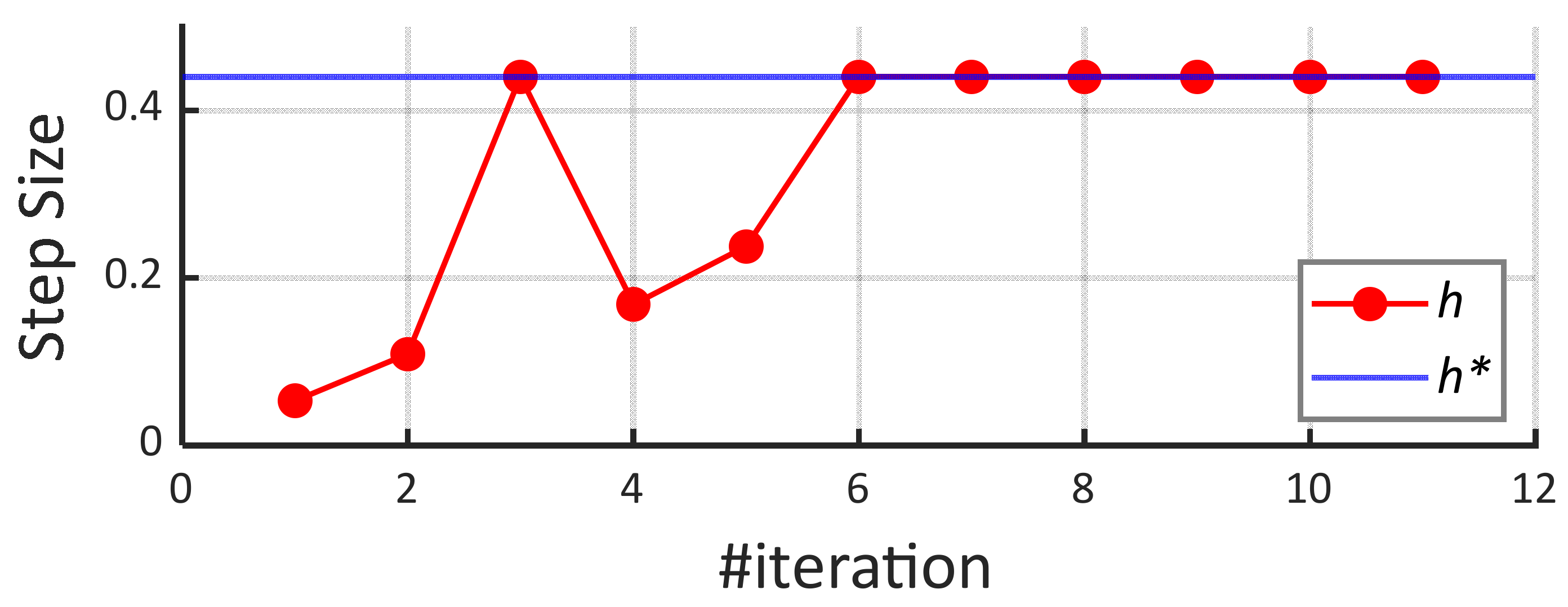
3.4. A Rule for Updating the Step Size
4. Numerical Experiments
- The 3012-bus snapshot of the Polish transmission system at 2007–2008 evening peak [45].
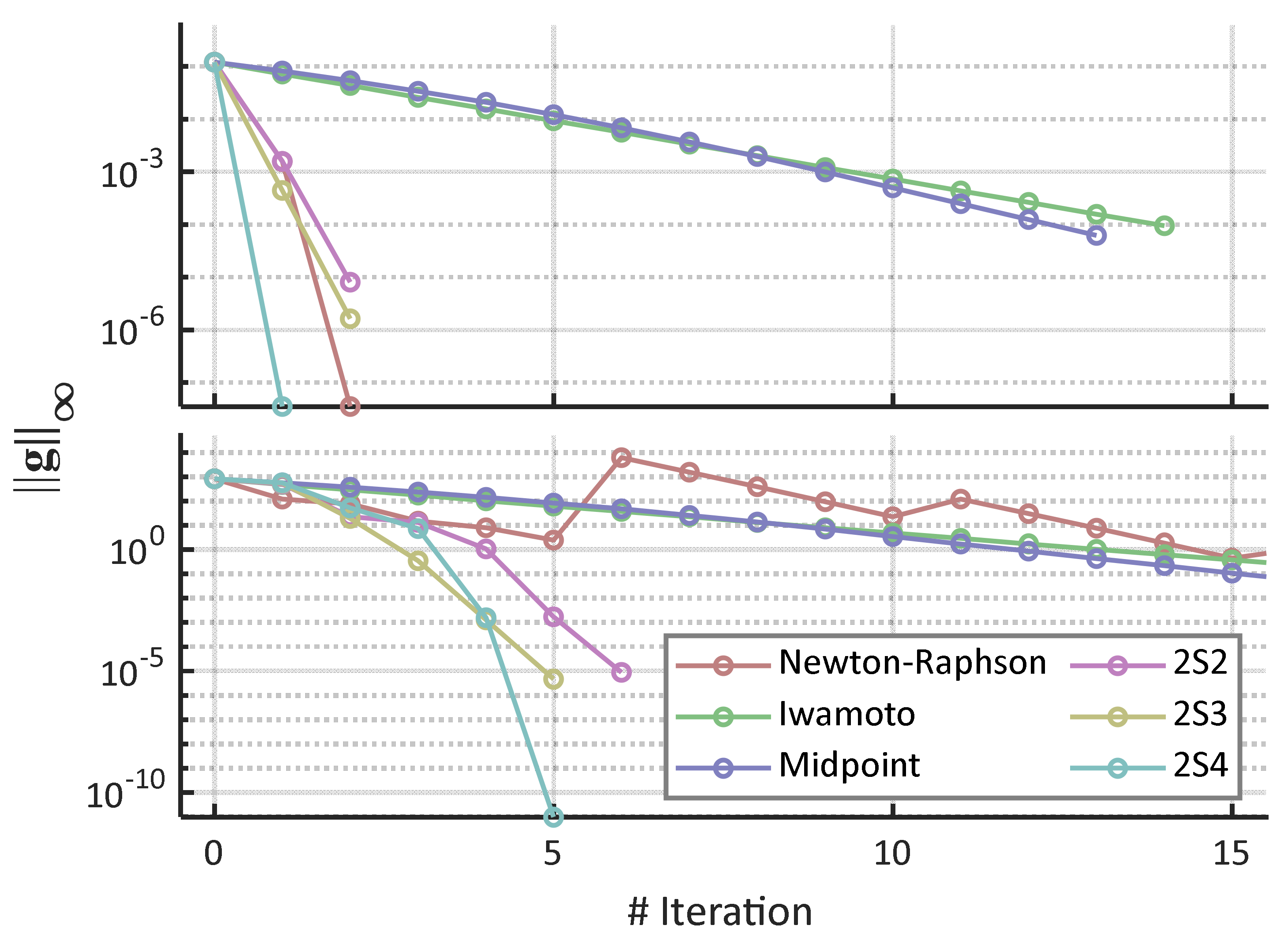
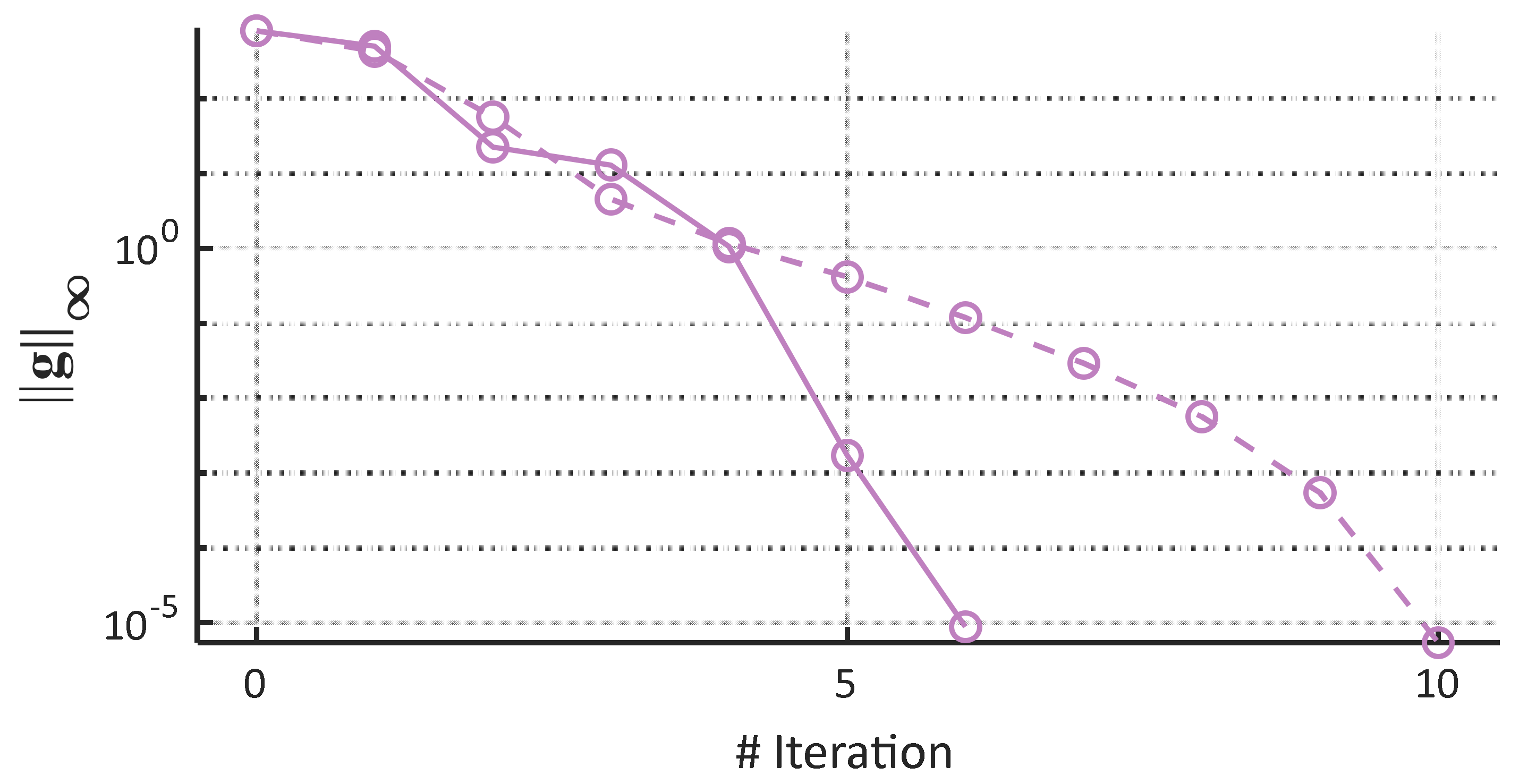
4.1. Convergence Rates for Base Cases
4.2. Convergence Rates with Reactive Limits
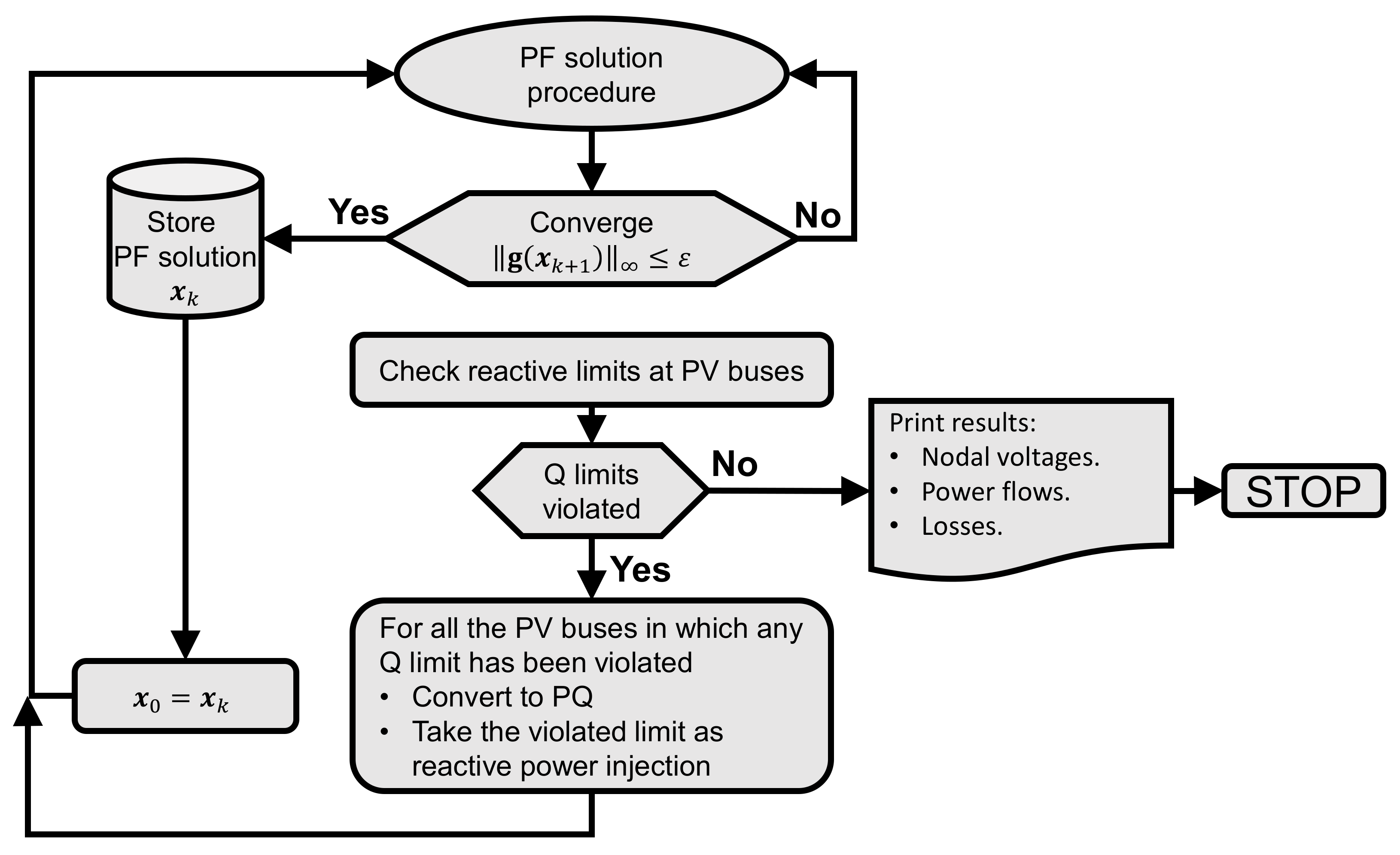
- Each time the PF problem is run, the size of the system is increased because more PQ buses (which contribute with two variables and two equations) are incorporated to the system.
- As the size of the system grows and more PQ buses are added, the ill-conditioned issues are more notable. To overcome this problem, the algorithm detailed in Figure 4 takes the solution of the previous PF procedure as the initial guess for the following process, since this approach will intuitively be a better initialization than the flat start.
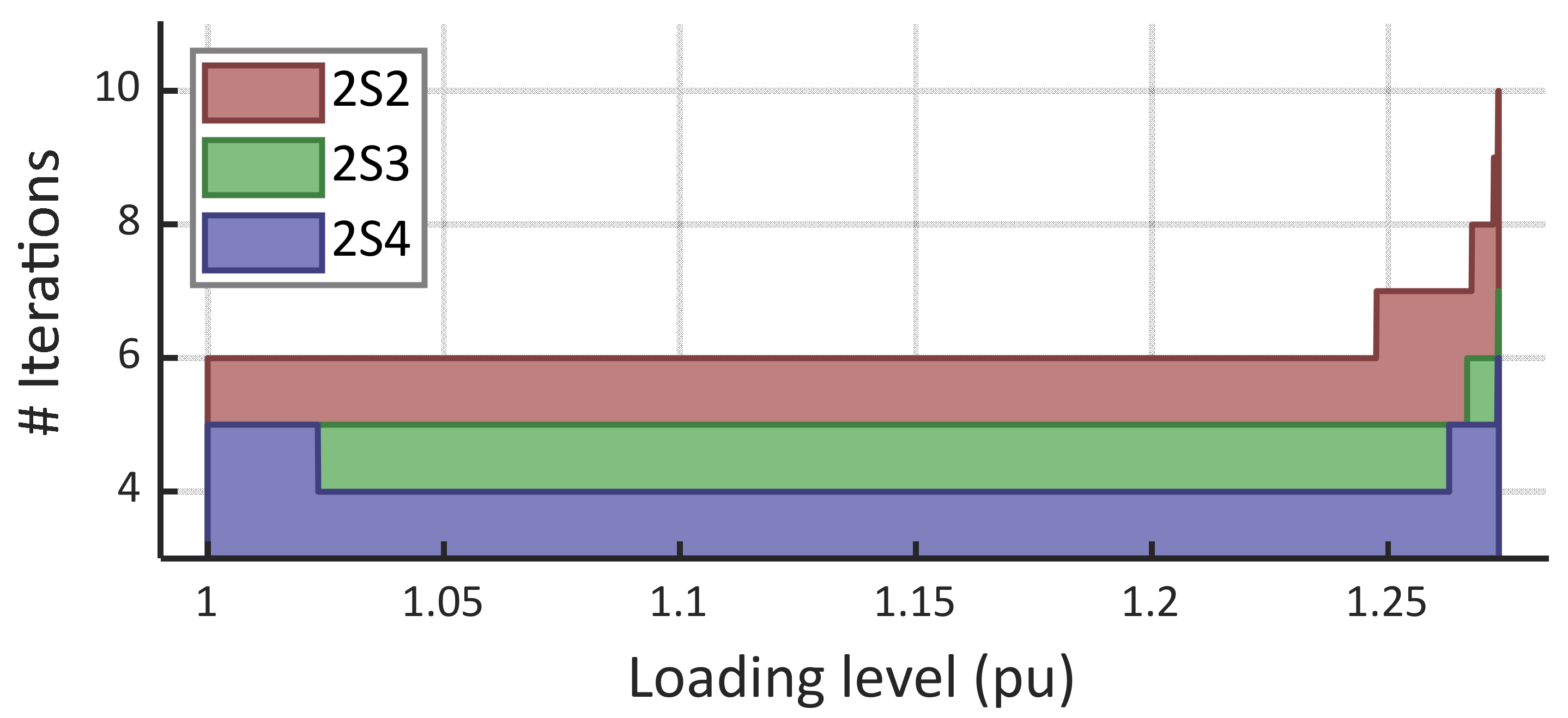
4.3. Influence of the Loading Level
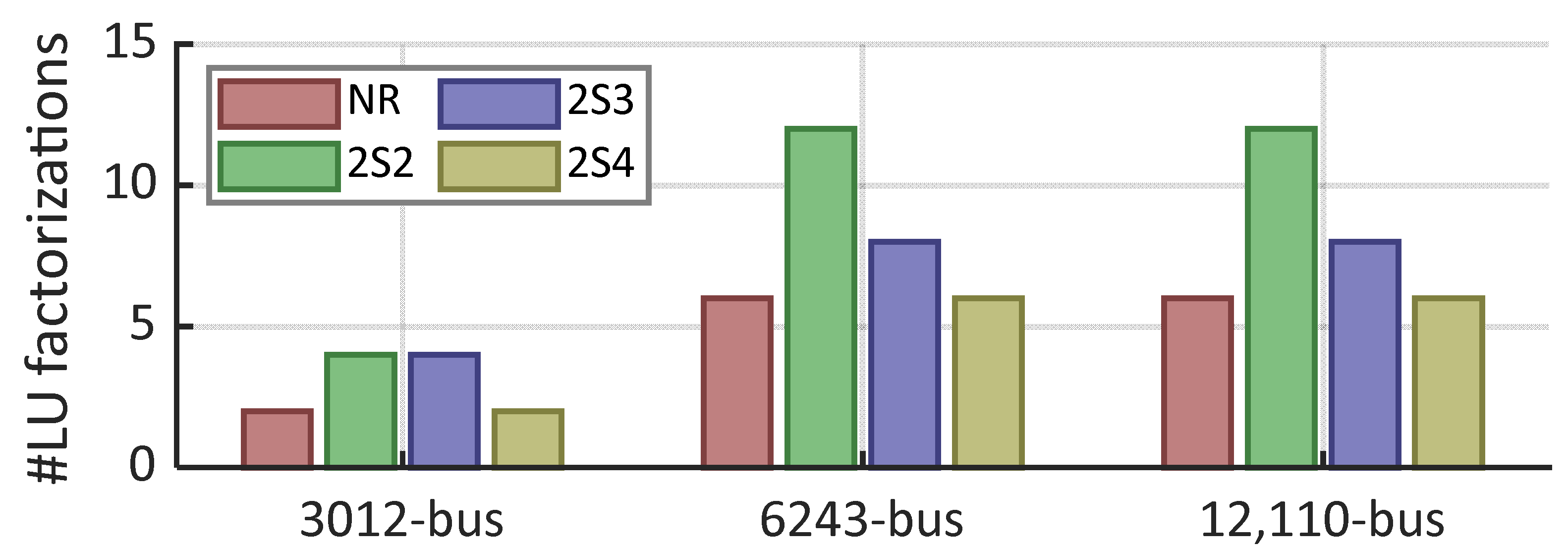
4.4. Computational Cost
5. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tang, K.; Dong, S.; Shen, J.; Zhu, C.; Song, Y. A Robust and Efficient Two-Stage Algorithm for Power Flow Calculation of Large-Scale Systems. IEEE Trans. Power Syst. 2019, 34, 5012–5022. [Google Scholar] [CrossRef]
- Sobhy, M.A.; Abdelaziz, A.Y.; Hasanien, H.M.; Ezzat, M. Marine predators algorithm for load frequency control of modern interconnected power systems including renewable energy sources and energy storage units. Ain Shams Eng. J. 2021, 12, 3843–3857. [Google Scholar] [CrossRef]
- Xie, N.; Torelli, F.; Bompard, E.; Vaccaro, A. Dynamic computing paradigm for comprehensive power flow analysis. IET Gener. Transm. Distrib. 2013, 7, 832–842. [Google Scholar] [CrossRef]
- Pourbagher, R.; Derakhshandeh, S.Y. A powerful method for solving the power flow problem in the ill-conditioned systems. Int. J. Electr. Power Energy Syst. 2018, 94, 88–96. [Google Scholar] [CrossRef]
- Zhao, T.Q.; Chiang, H.-N.; Koyanagi, K. Convergence analysis of implicit Z-bus power flow method for general distribution networks with distributed generators. IET Gener. Transm. Distrib. 2016, 10, 412–420. [Google Scholar] [CrossRef]
- Milano, F. Power System Modelling and Scripting; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Milano, F. Continuous Newton’s Method for Power Flow Analysis. IEEE Trans. Power Syst. 2009, 24, 50–57. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F.; Ruiz-Rodriguez, F.J. On the Applicability of Two Families of Cubic Techniques for Power Flow Analysis. Energies 2021, 14, 4108. [Google Scholar] [CrossRef]
- Tinney, W.F.; Hart, C.E. Power Flow Solution by Newton’s Method. IEEE Trans. Power Appar. Syst. 1967, PAS-86, 1449–1460. [Google Scholar] [CrossRef]
- Sachdev, M.S.; Medicherla, T.K.P. A second order load flow technique. IEEE Trans. Power Appar. Syst. 1977, 96, 189–197. [Google Scholar] [CrossRef]
- Iwamoto, S.; Tamura, Y. A Fast Load Flow Method Retaining Nonlinearity. IEEE Trans. Power Appar. Syst. 1978, PAS-97, 1586–1599. [Google Scholar] [CrossRef]
- Stott, B.; Alsac, O. Fast Decoupled Load Flow. IEEE Trans. Power Appar. Syst. 1974, PAS-93, 859–869. [Google Scholar] [CrossRef]
- Idema, R.; Lahaye, D.J.P. Computational Methods in Power System Analysis; Schilders, W., Ed.; Atlantis Press: Paris, France, 2014. [Google Scholar]
- Tinney, W.F.; Walker, J.W. Direct solutions of sparse network equations by optimally ordered triangular factorization. Proc. IEEE 1967, 55, 1801–1809. [Google Scholar] [CrossRef] [Green Version]
- Derakhshandeh, S.Y.; Pourbagher, R.; Kargar, A. A novel fuzzy logic Levenberg-Marquardt method to solve the ill-conditioned power flow problem. Int. J. Electr. Power Energy Syst. 2018, 99, 299–308. [Google Scholar] [CrossRef]
- Tortelli, O.L.; Lourenco, E.M.; Garcia, A.V.; Pal, B.C. Fast Decoupled Power Flow to Emerging Distribution Systems via Complex pu Normalization. IEEE Trans. Power Syst. 2015, 30, 1351–1358. [Google Scholar] [CrossRef]
- Li, X.; Li, F.; Yuan, H.; Cui, H.; Hu, Q. GPU-Based Fast Decoupled Power Flow with Preconditioned Iterative Solver and Inexact Newton Method. IEEE Trans. Power Syst. 2017, 32, 2695–2703. [Google Scholar] [CrossRef]
- Milano, F. Implicit Continuous Newton Method for Power Flow Analysis. IEEE Trans. Power Syst. 2019, 34, 3309–3311. [Google Scholar] [CrossRef]
- Iwamoto, S.; Tamura, Y. A Load Flow Calculation Method for Ill-Conditioned Power Systems. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 1736–1743. [Google Scholar] [CrossRef]
- Tate, J.E.; Overbye, T.J. A Comparison of the Optimal Multiplier in Polar and Rectangular Coordinates. IEEE Trans. Power Syst. 2005, 20, 1667–1674. [Google Scholar] [CrossRef]
- Mokhlis, H.; Shahriari, A.; Bakar, A.H.A.; Illias, H.A.; Karimi, M. Improved Step Size Newton Raphson Method using quadratic equations properties in ill-conditioned power system. Int. Trans. Electr. Energy Syst. 2014, 24, 1323–1342. [Google Scholar] [CrossRef]
- Shahriari, A.; Mokhlis, H.; Karimi, M.; Bakar, A.H.A.; Illias, H.A. Quadratic Discriminant Index for Optimal Multiplier Load Flow Method in ill conditioned system. Int. J. Electr. Power Energy Syst. 2014, 60, 378–388. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 2nd ed.; Wiley: Chichester, UK, 2008. [Google Scholar]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Development of different load flow methods for solving large-scale ill-conditioned systems. Int. Trans. Electr. Energy Syst. 2019, 29, e2784. [Google Scholar] [CrossRef]
- Tostado-Veliz, M.; Kamel, S.; Jurado, F. A Robust Power Flow Algorithm Based on Bulirsch-Stoer Method. IEEE Trans. Power Syst. 2019, 34, 3081–3089. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Comparison of various robust and efficient load-flow techniques based on Runge-Kutta formulas. Electr. Power Syst. Res. 2019, 174, 105881. [Google Scholar] [CrossRef]
- Xie, N.; Bompard, E.; Napoli, R.; Torelli, F. Widely convergent method for finding solutions of simultaneous nonlinear equations. Electr. Power Syst. Res. 2012, 83, 9–18. [Google Scholar] [CrossRef]
- Torelli, F.; Vaccaro, A. A second order dynamic power flow model. Electr. Power Syst. Res. 2015, 126, 12–20. [Google Scholar] [CrossRef]
- Torelli, F.; Vaccaro, A.; Pepiciello, A. A Dynamic Framework for Multiobjective Mixed-Integer Optimal Power Flow Analyses. Technol. Econ. Smart Grids Sustain. Energy 2021, 6, 14. [Google Scholar] [CrossRef]
- Gnanambal, K.; Marimuthu, N.S.; Babulal, C.K. Three-phase power flow analysis in sequence component frame using Hybrid Particle Swarm Optimization. Appl. Soft Comput. 2011, 11, 1727–1734. [Google Scholar] [CrossRef]
- Davoodi, E.; Hagh, M.T.; Zadeh, S.G. A hybrid Improved Quantum-behaved Particle Swarm Optimization–Simplex method (IQPSOS) to solve power system load flow problems. Appl. Soft Comput. 2014, 21, 171–179. [Google Scholar] [CrossRef]
- Derakhshandeh, S.Y.; Pourbagher, R. Application of high-order Newton-like methods to solve power flow equations. IET Gener. Transm. Distrib. 2016, 10, 1853–1859. [Google Scholar] [CrossRef]
- Tostado, M.; Kamel, S.; Jurado, F. Developed Newton-Raphson based Predictor-Corrector load flow approach with high convergence rate. Int. J. Electr. Power Energy Syst. 2019, 105, 785–792. [Google Scholar] [CrossRef]
- Tostado-Veliz, M.; Kamel, S.; Jurado, F. Two Efficient and Reliable Power-Flow Methods with Seventh Order of Convergence. IEEE Syst. J. 2021, 15, 1026–1035. [Google Scholar] [CrossRef]
- Alharbi, T.; Tostado-Véliz, M.; Alrumayh, O.; Jurado, F. On Various High-Order Newton-Like Power Flow Methods for Well and Ill-Conditioned Cases. Mathematics 2021, 9, 2019. [Google Scholar] [CrossRef]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. A Three-Phase Power Flow Approach for Integrated 3-Wire MV and 4-Wire Multigrounded LV Networks with Rooftop Solar PV. IEEE Trans. Power Syst. 2013, 28, 1728–1737. [Google Scholar] [CrossRef]
- Saleh, S.A. The Formulation of a Power Flow Using d−q Reference Frame Components—Part I: Balanced 3ϕ Systems. IEEE Trans. Ind. Appl. 2016, 52, 3682–3693. [Google Scholar] [CrossRef]
- Pires, R.; Mili, L.; Chagas, G. Robust complex-valued Levenberg-Marquardt algorithm as applied to power flow analysis. Int. J. Electr. Power Energy Syst. 2019, 113, 383–392. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Power flow solution of Ill-conditioned systems using current injection formulation: Analysis and a novel method. Int. J. Electr. Power Energy Syst. 2021, 127, 106669. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, N.; Kang, C.; Xia, Q. A State-Independent Linear Power Flow Model with Accurate Estimation of Voltage Magnitude. IEEE Trans. Power Syst. 2017, 32, 3607–3617. [Google Scholar] [CrossRef]
- Traub, J.F. Iterative Methods for the Solution of Equations; Chelsea: New York, NY, USA, 1982. [Google Scholar]
- Lee, J.; Chiang, H.-D. Convergent regions of the Newton homotopy method for nonlinear systems: Theory and computational applications. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2001, 48, 51–66. [Google Scholar] [CrossRef]
- Cordero, A.; Torregrosa, J.R.; Triguero-Navarro, P. A General Optimal Iterative Scheme with Arbitrary Order of Convergence. Symmetry 2021, 13, 884. [Google Scholar] [CrossRef]
- Gurobi, the Fastest Solver. Available online: https://www.gurobi.com/ (accessed on 10 September 2021).
- Matpower User’s Manual. Available online: https://matpower.org/docs/manual.pdf (accessed on 10 September 2021).
- Josz, C.; Fliscounakis, S.; Maeght, J.; Panciatici, P. AC Power Flow Data in MATPOWER and QCQP Format: Itesla, RTE Snap-Shots, and PEGASE. 2016. Available online: https://arxiv.org/abs/1603.01533 (accessed on 10 September 2021).
- Fliscounakis, S.; Panciatici, P.; Capitanescu, F.; Wehenkel, L. Contingency Ranking with Respect to Overloads in Very Large Power Systems Taking into Account Uncertainty, Preventive, and Corrective Actions. IEEE Trans. Power Syst. 2013, 28, 4909–4917. [Google Scholar] [CrossRef] [Green Version]
- MATPOWER Ill-Conditioned Systems Used for Validating Power-Flow Techniques. Available online: https://zenodo.org/record/3514739 (accessed on 10 September 2021).
- Zimmerman, R.D.; Murillo-Sanchez, C.E.; Thomas, R.J. MATPOWER: Steady-State Operations, Planning, and Analysis Tools for Power Systems Research and Education. IEEE Trans. Power Syst. 2011, 26, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Tostado-Veliz, M.; Alharbi, T.; Alrumayh, O.; Kamel, S.; Jurado, F. A Novel Power Flow Solution Paradigm for Well and Ill-Conditioned Cases. IEEE Access 2021, 9, 112425–112438. [Google Scholar] [CrossRef]
- Gomez-Exposito, A.; Quiles, C.G. Factorized Load Flow. IEEE Trans. Power Syst. 2013, 28, 4607–4614. [Google Scholar] [CrossRef]
- Pourbagher, R.; Derakhshandeh, S.Y.; Golshan, M.E.H. An adaptive multi-step Levenberg-Marquardt continuation power flow method for voltage stability assessment in the Ill-conditioned power systems. Int. J. Electr. Power Energy Syst. 2022, 134, 107425. [Google Scholar] [CrossRef]
- Shen, Z.; Chiang, H.-D.; Tang, Y.; Zhou, N. An online line switching methodology with look-ahead capability to alleviate power system overloads based on a three-stage strategy. Int. J. Electr. Power Energy Syst. 2020, 115, 105500. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solver Acronym | Order of Convergence | |||||
|---|---|---|---|---|---|---|
| 2S2 | Quadratic | 1 | 1 | 1 | 1 | 2 |
| 2S3 | Cubic | 0.65 | 1/3 | 2 | 0.70 | 1.65 |
| 2S4 | Fourth | 1/3 | 2 | 1/3 | 0.44 | 1 |
| Characteristic | 3012-Bus | 6243-Bus | 12,110-Bus | |
|---|---|---|---|---|
| Buses | 3012 | 6243 | 12,110 | |
| Branches | 3572 | 8744 | 20,632 | |
| Generators | 502 | 989 | 1955 | |
| Load | MW | 27,169 | 180,800 | 444,791 |
| Mvar | 10,200 | 48,535 | 102,589 | |
| Size of the state vector (n) | 5725 | 11,583 | 22,264 | |
| Condition number (41) | ||||
| Method | Initial Guess | # Iterations | ||
|---|---|---|---|---|
| 3012-Bus | 6243-Bus | 12,110-Bus | ||
| NR | Default | 2 | 6 | 6 |
| Iwamoto | Default | 14 | 25 | 26 |
| MP | Default | 13 | 21 | 21 |
| 2S2 | Default | 2 | 6 | 6 |
| 2S3 | Default | 2 | 4 | 4 |
| 2S4 | Default | 1 | 3 | 3 |
| NR | Flat | Fail | Fail | Fail |
| Iwamoto | Flat | 32 | 33 | 31 |
| MP | Flat | 26 | 26 | 25 |
| 2S2 | Flat | 6 | 11 | 7 |
| 2S3 | Flat | 5 | 7 | 6 |
| 2S4 | Flat | 5 | 7 | 5 |
| Method | Initial Guess | # Iterations | ||
|---|---|---|---|---|
| 3012-Bus | 6243-Bus | 12,110-Bus | ||
| NR | Default | 4 | 11 | 12 |
| Iwamoto | Default | 40 | 76 | 80 |
| MP | Default | 36 | 66 | 68 |
| 2S2 | Default | 5 | 13 | 13 |
| 2S3 | Default | 5 | 10 | 10 |
| 2S4 | Default | 3 | 6 | 6 |
| NR | Flat | Fail | Fail | Fail |
| Iwamoto | Flat | 58 | 84 | 85 |
| MP | Flat | 49 | 71 | 72 |
| 2S2 | Flat | 9 | 18 | 14 |
| 2S3 | Flat | 8 | 13 | 12 |
| 2S4 | Flat | 7 | 10 | 8 |
| Method | Initial Guess | # Iterations | ||
|---|---|---|---|---|
| 3012-Bus | 6243-Bus | 12,110-Bus | ||
| NR | Default | 8 | 8 | 8 |
| Iwamoto | Default | 27 | 27 | 28 |
| MP | Default | 20 | 21 | 21 |
| 2S2 | Default | 8 | 8 | 8 |
| 2S3 | Default | 6 | 6 | 8 |
| 2S4 | Default | 5 | 5 | 5 |
| NR | Flat | Fail | Fail | Fail |
| Iwamoto | Flat | 32 | 33 | 31 |
| MP | Flat | 26 | 26 | 25 |
| 2S2 | Flat | 10 | 12 | 10 |
| 2S3 | Flat | 7 | 8 | 7 |
| 2S4 | Flat | 6 | 8 | 8 |
| Method | Initial Guess | Execution Time | ||
|---|---|---|---|---|
| 3012-Bus | 6243-Bus | 12,110-Bus | ||
| NR | Default | 42.12 | 248.64 | 540.72 |
| Iwamoto | Default | 298.34 | 1079.00 | 2424.24 |
| MP | Default | 549.38 | 1701.42 | 3704.40 |
| 2S2 | Default | 84.52 | 486.12 | 1058.40 |
| 2S3 | Default | 84.52 | 324.08 | 705.60 |
| 2S4 | Default | 42.26 | 243.06 | 529.20 |
| NR | Flat | -- | -- | -- |
| Iwamoto | Flat | 681.92 | 1424.28 | 2890.44 |
| MP | Flat | 1098.76 | 2106.52 | 4410.00 |
| 2S2 | Flat | 253.56 | 891.22 | 1234.80 |
| 2S3 | Flat | 211.30 | 567.14 | 1058.40 |
| 2S4 | Flat | 211.30 | 567.14 | 882.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tostado-Véliz, M.; Alharbi, T.; Alharbi, H.; Kamel, S.; Jurado, F. On Optimal Settings for a Family of Runge–Kutta-Based Power-Flow Solvers Suitable for Large-Scale Ill-Conditioned Cases. Mathematics 2022, 10, 1279. https://doi.org/10.3390/math10081279
Tostado-Véliz M, Alharbi T, Alharbi H, Kamel S, Jurado F. On Optimal Settings for a Family of Runge–Kutta-Based Power-Flow Solvers Suitable for Large-Scale Ill-Conditioned Cases. Mathematics. 2022; 10(8):1279. https://doi.org/10.3390/math10081279
Chicago/Turabian StyleTostado-Véliz, Marcos, Talal Alharbi, Hisham Alharbi, Salah Kamel, and Francisco Jurado. 2022. "On Optimal Settings for a Family of Runge–Kutta-Based Power-Flow Solvers Suitable for Large-Scale Ill-Conditioned Cases" Mathematics 10, no. 8: 1279. https://doi.org/10.3390/math10081279
APA StyleTostado-Véliz, M., Alharbi, T., Alharbi, H., Kamel, S., & Jurado, F. (2022). On Optimal Settings for a Family of Runge–Kutta-Based Power-Flow Solvers Suitable for Large-Scale Ill-Conditioned Cases. Mathematics, 10(8), 1279. https://doi.org/10.3390/math10081279