
A Multi-Agent Approach for Self-Healing and RES-Penetration in Smart Distribution Networks


Abstract
:1. Introduction
- Fast fault identification, fault location detection, and fault isolation;
- Electricity flow reconfiguration to re-energize the out-of-service zones with minimum human intervention, depending on the level of automation;
- Optimum service restoration, thus minimizing the number of outage zones while satisfying system and load constraints. This guarantees fast recovery and reduces the outages’ duration and the number of affected customers.
- It merges the distribution feeder MAS (zone and feeder agents) and micro-grid MAS (manager, load, and DG agents) to successfully accomplish the self-healing functions and control the DG contribution;
- Unlike related studies, which do not consider fault locating and isolation, the proposed scheme can efficiently achieve all self-healing functions. This includes fault detection, locating, and isolation, as well as service restoration;
- Service restoration takes place using the proposed algorithm while considering operation constraints, loads priorities, and the critical importance of different zones, which are not always taken into account in other relevant works;
- Unlike related studies, which do not consider DGs penetration, the proposed approach features an additional capability of managing energy from RESs integrated with distribution systems to guarantee a sustainable power supply, even during faults;
- Robust and efficient performance under different restoration scenarios and variable load conditions.
2. Problem Formulation and Constraints
2.1. Objectives
2.2. Constraints
3. Agents’ Design of the Proposed MAS Approach
3.1. Distribution Feeder Agents
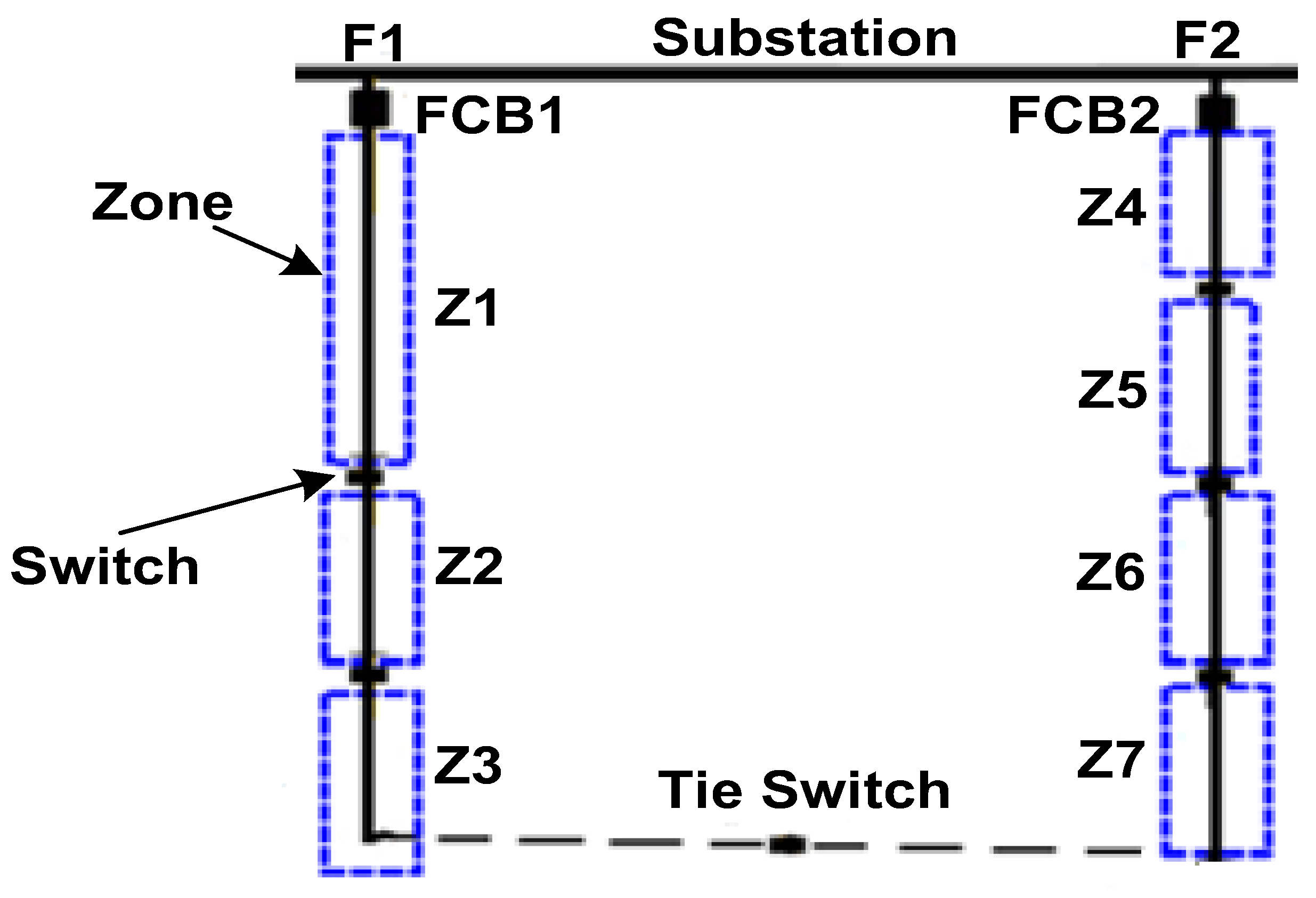
3.1.1. Zone Agent
- Faulted Zone Agent (FZA);
- Helped Zone Agent (HZA).
3.1.2. Feeder Agent
- Faulted Feeder Agent (FFA);
- Helped Feeder Agent (HFA).
3.2. Micro-Grid Agents
- Load agent: It contains the loads information in the micro-grid, i.e., power consumption, load number, and load priority according to load criticality;
- DG agent: It is responsible for storing the related DG information as well as monitoring and controlling the contribution of DG power;
- Manager agent: It is considered the heart of the micro-grid operation since it monitors all system conditions, whether loads or DGs. It receives information from the load agent and DG agent, then calculates the spare capacity. The feeder agent makes negotiations with the manager agent to obtain the amount of power which can be supplied by the DG in the process of service restoration.
4. Methodology of the Proposed MAS Approach
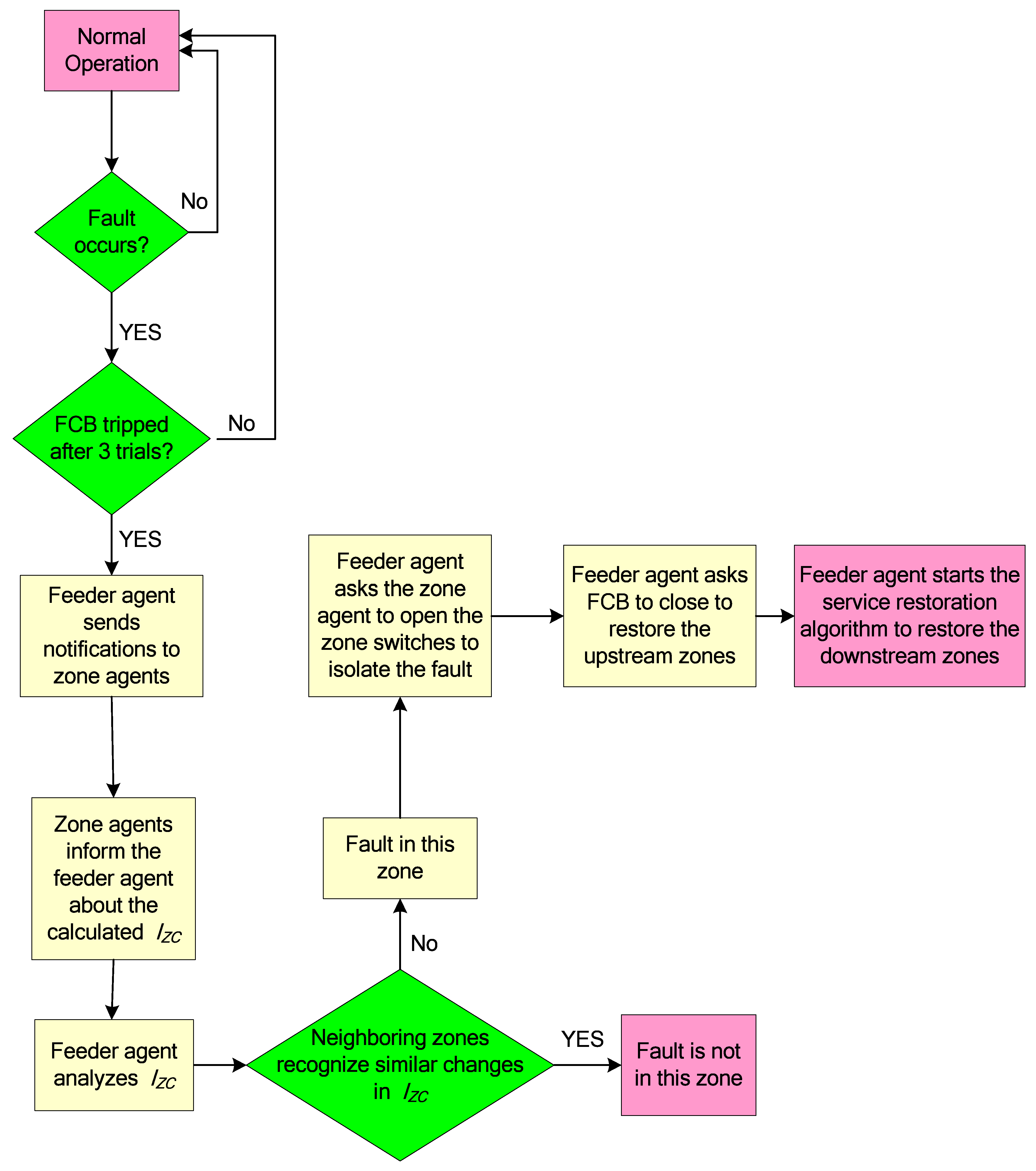
4.1. Fault Locating and Isolation Algorithm
- Each ZA computes its current usage using Equation (9) and continuously updates it using the information from measuring devices;
- When there is a fault in the feeder, the feeder circuit breaker (FCB) goes for its three trials and the FA informs its ZAs to be aware of the trials;
- After FCB tripping, the FA notifies its ZAs about the trip;
- The ZAs exchange the changes in their drawn current with their FA. This current change is continuously calculated by the ZAs using Equation (10) before and during the FCB trials;
- The FA studies for each zone. If a big difference between the of a certain zone and that of the neighboring zones exists, then the fault location is detected within this zone;
- FA starts communicating the downstream ZA of the zone in which the fault is diagnosed to confirm fault isolation by asking the switching devices to open and separate the faulted downstream zones;
- Then, the upstream service zones are restored by the closure of the FCB;
- Finally, a service restoration algorithm is applied to restore the downstream faulted service zones, which will be described in the next subsection.
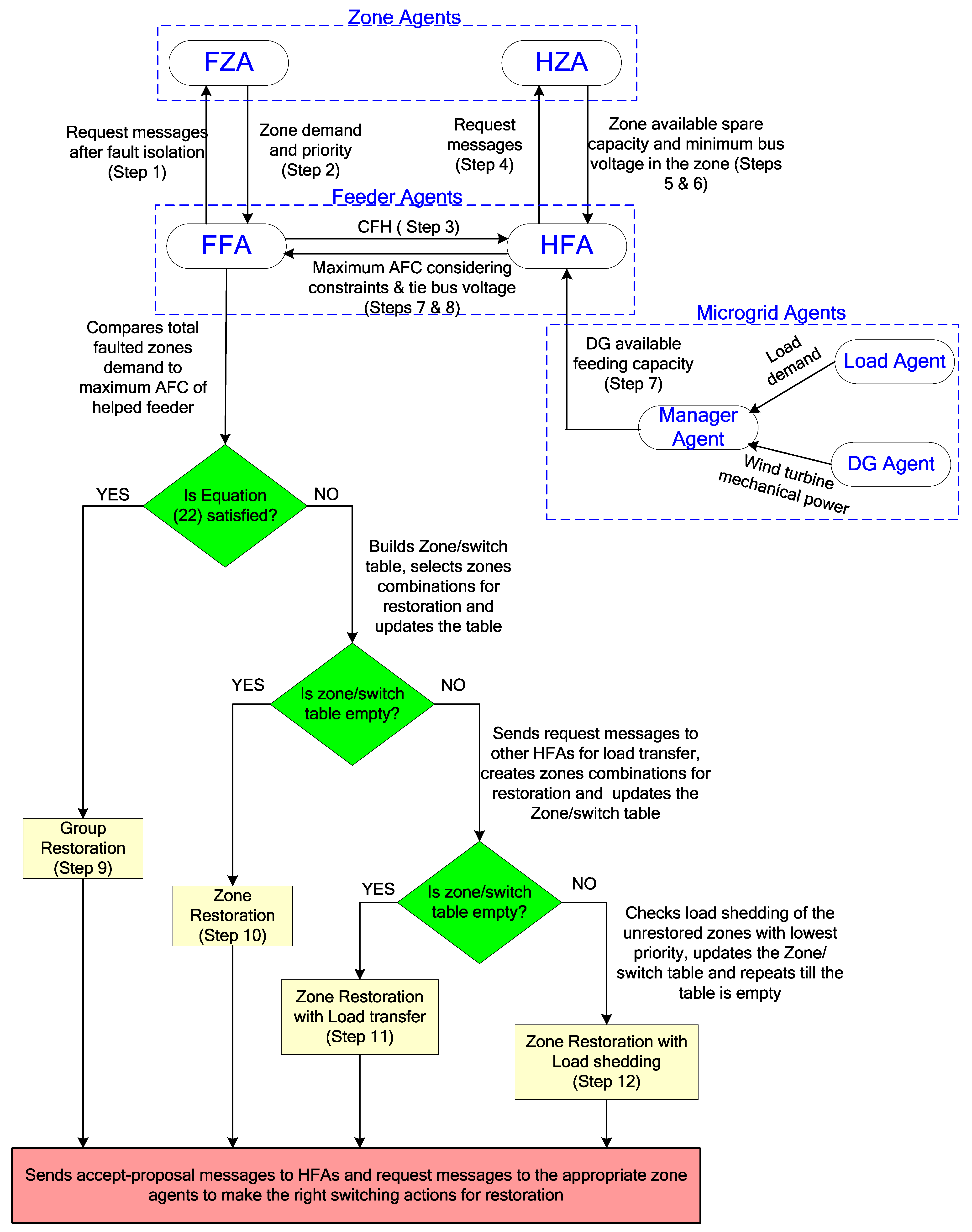
4.2. Service Restoration Algorithm
- Group Restoration: The outage loads are restored as a single group with one switching action;
- Zone Restoration: It takes place if group restoration is not valid since the total capacity of outage zones cannot be fulfilled by a single HFA. In this case, if the total available capacity of HFAs is more than outage zones capacity, then outage zones are restored by more than one switching action. Suitable restoration paths are specified using the zone/switch relationship table, as explained later [20];
- Zone Restoration with Load Transfer: It takes place if the HFAs’ total available capacity is less than the outage zones’ capacity. In this case, some zones are transferred from the main HFs to their neighbors to restore the remaining unrestored zones;
- Zone Restoration with Load Shedding: In this case, the least-priority zones are shed to restore the remaining unrestored zones with the remaining limited capacity.
- First, the maximum spare capacity of the restoration path is computed without violating both current and voltage operating constraints as follows [29]:where j is the order of the zone in the restoration path, Vo is the lowest bus voltage magnitude received from the zone agent, is the minimum allowable voltage magnitude in the network (0.95 p.u.), is the series impedance of the restoration path, is the maximum spare capacity of the restoration path with respect to the current limit constraint, and is the maximum spare capacity in the restoration path with respect to the voltage limit constraint and the Is of the maximum spare capacity of the restoration path, without violating both current and voltage operating constraints.
- Then, using the computed Is, the HFA calculates the available feeding capacity (AFC) as follows:
- In case of DG penetration, the HFA sends to the micro-grid manager agent asking for the DG available feeding capacity . To calculate the latter:
- i
- The DG agent calculates the mechanical power provided by wind turbine using Equations (18) and (19) [30]:where is the air density, R is the wind turbine radius, is the wind speed, w is the rotation speed of the wind turbine, is the tip speed ratio, is the pitch angle, and is the wind energy capture coefficient, and it is the function of the tip speed ratio and the pitch angle;
- ii
- The manager agent receives information from the micro-grid load agent about the load consumption and from the DG agent about the DG power level i.e., wind power ;
- iii
- Then, it calculates the DG available feeding capacity ,where is the summation of power consumption of micro-grid loads;
- iv
- Finally, the manager agent informs the HFA about this spare power to contribute to the service restoration process.
- FFA starts to create all possible downstream faulted zones’ combinations that can be restored through multiple switching operations [20]:where the set represents all the possible zone combinations for zone transfer; is the collection of j adjacent zones bounded by two or more switches at least one of which is a tie switch.
- FFA compares the of HFAs with the combinations of ; then, after checking all available possibilities, the FFA does the following:
- Sends accept-proposal messages to the HFAs that will be used in the restoration;
- Places tie switches between the feeder agents with accepted proposals and the combinations selected for restoration in a switch-to-be-closed list;
- Places the bounded sectionalizing switches of the selected combinations in a switch-to-be-opened list in order to satisfy the radial constraint;
- Updates the zone/switch relation table.
- The FFA checks whether all zones have been restored (i.e., the table is empty) or not. If the table is empty, the FFA sends request messages to the appropriate zone agents, asking them to open their switches, included in the switch-to-be-opened list, in order to separate the outage area and also to close their tie switches, included in the switch-to-be-closed list, for restoration.
- The request messages ask the HFAs to start negotiations with their neighbors (other helped feeder agents) to find another spare power using Load transfer. Thus, Load Transfer is carried out to provide additional AFC and restore the remaining faulted zones combinations.
- The main helped feeder selects its zones to be transferred to the neighboring helped feeders according to Equation (26):
- After deciding on the zones to be transferred to a neighboring helped feeder, the HFA sends a proposal message to FFA agent with its new AFC after Load Transfer.
- After HFAs reply to FFA with their new AFC, and the FFA repeats step 10.
4.3. Backup Algorithm in Case of Communication Link Failure
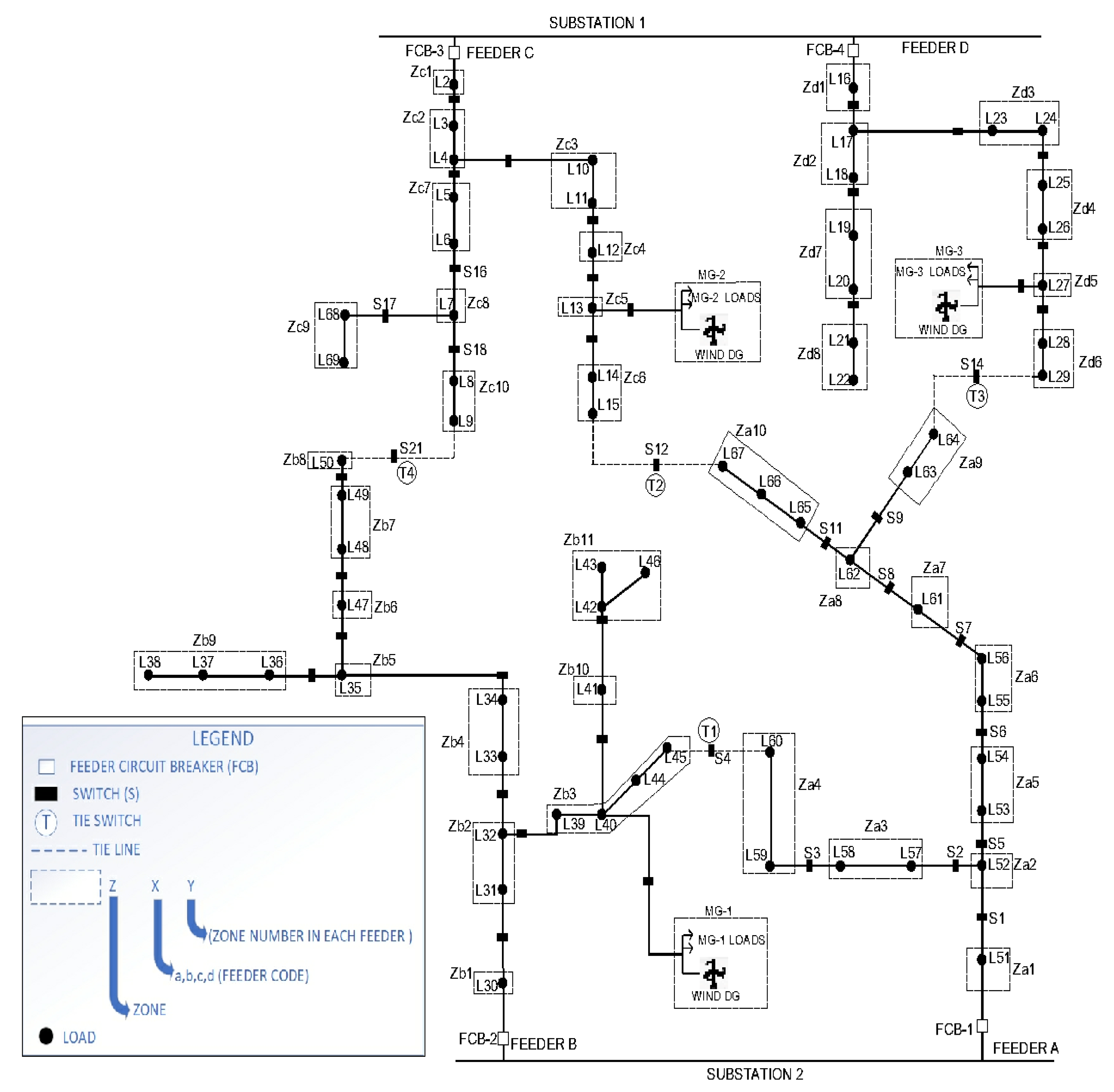
5. Simulation Cases and Results
5.1. Different Restoration Simulation Cases
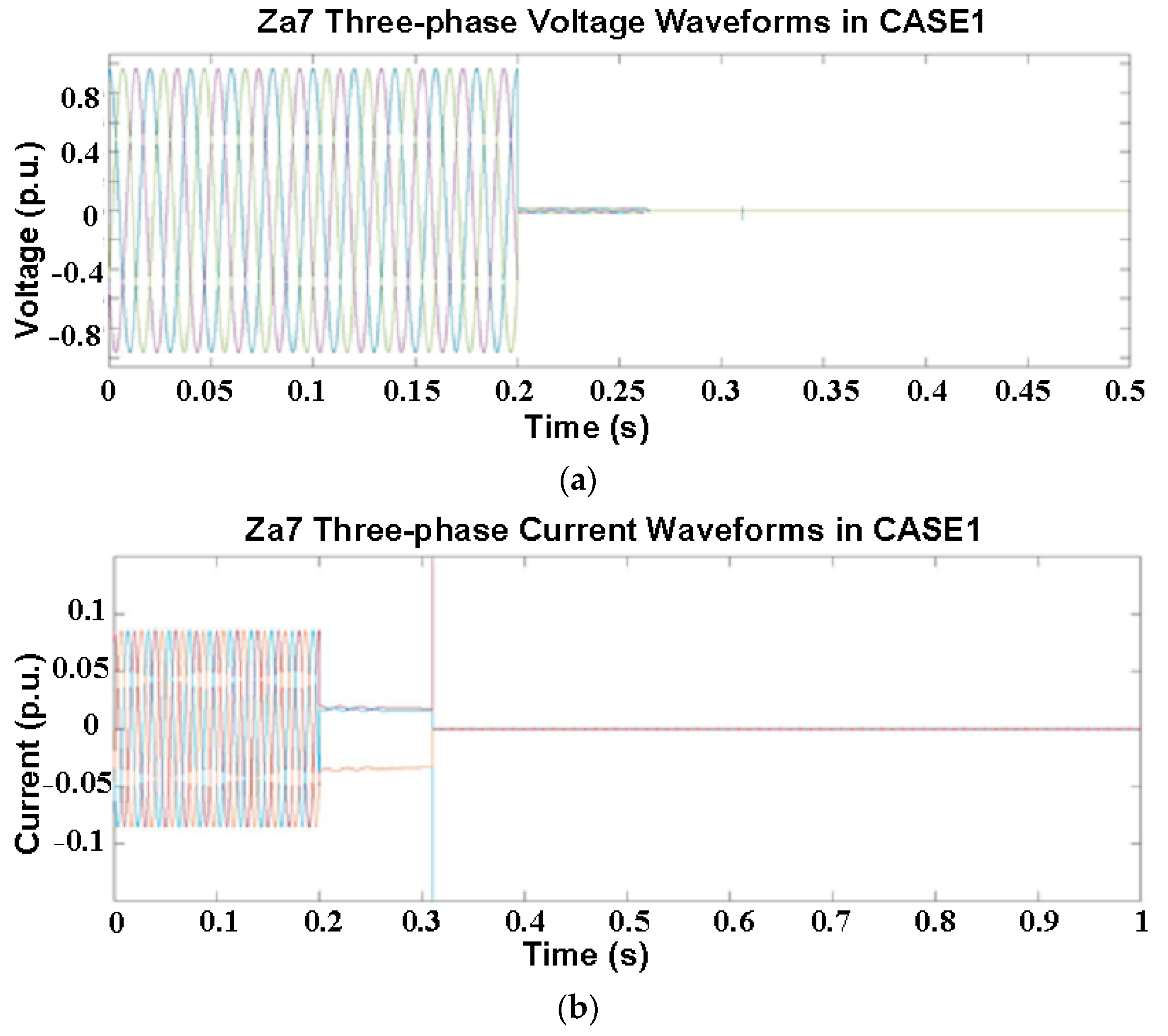
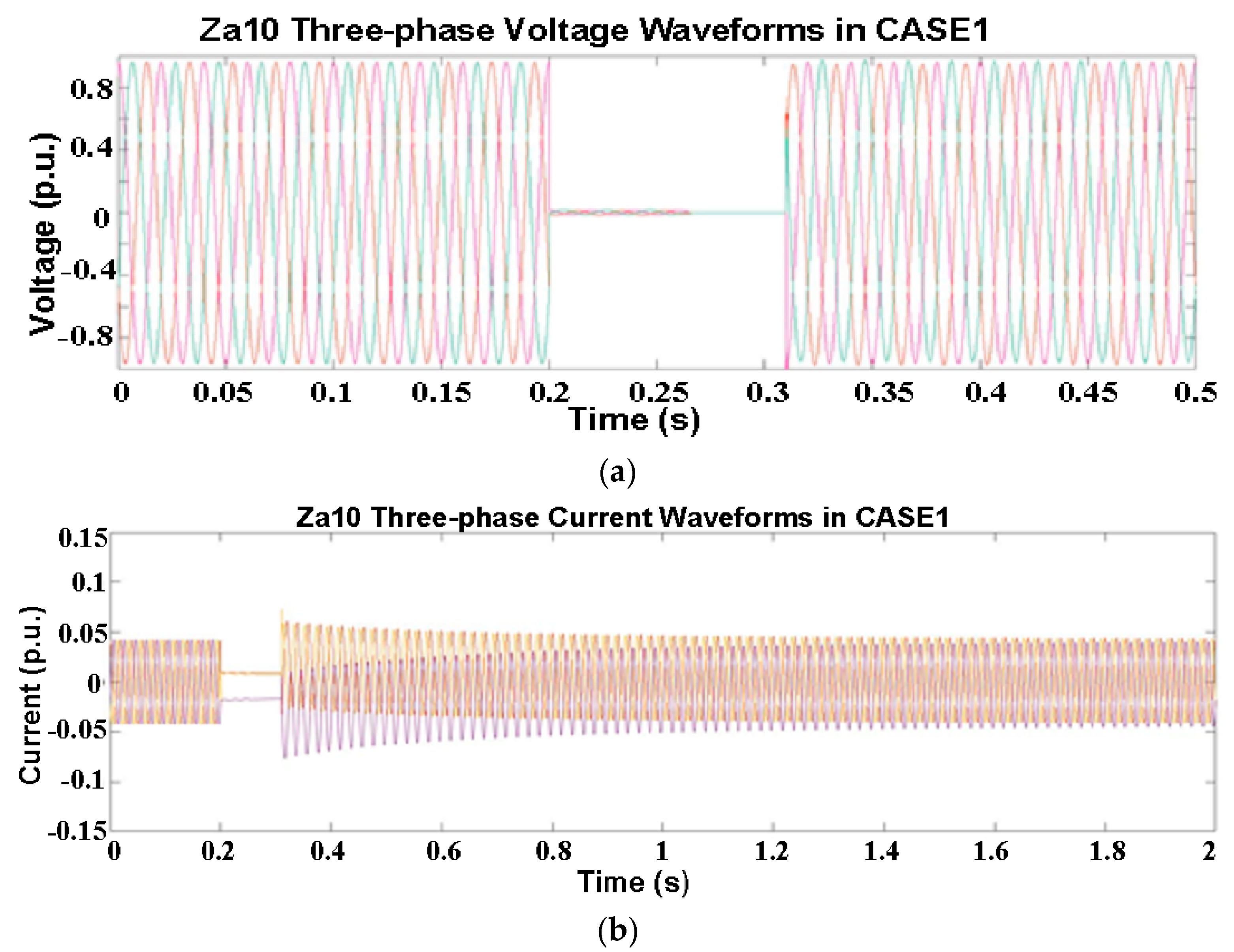
5.1.1. CASE 1: Group Restoration without DG
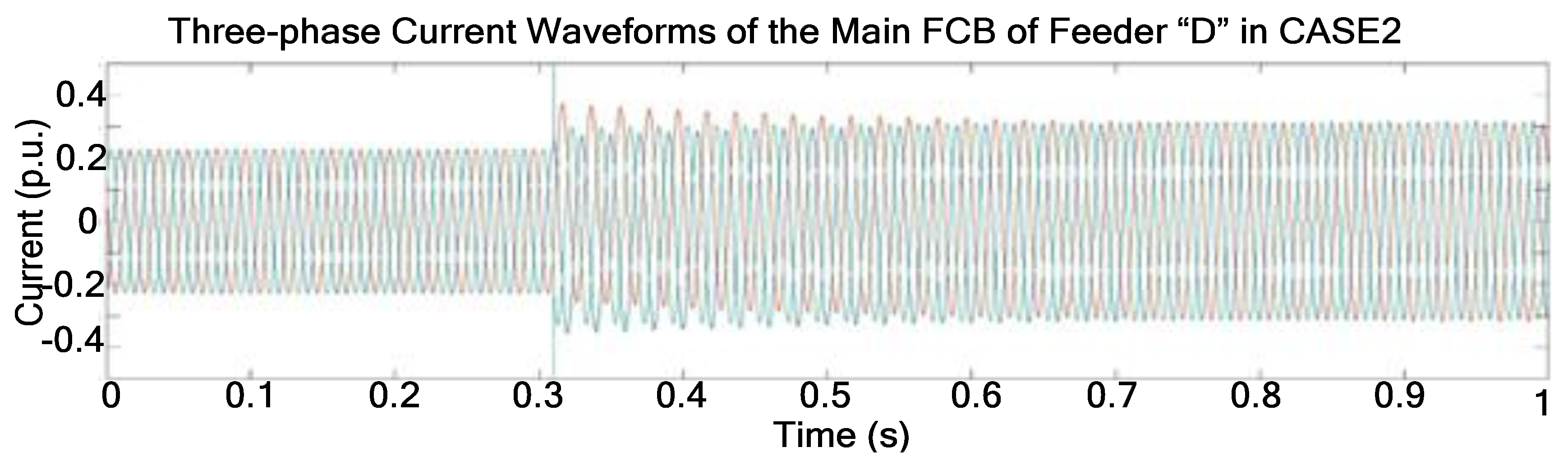
5.1.2. CASE 2: Zone Restoration without DG
5.1.3. CASE 3: Zone Restoration with Load Transfer without DG
5.1.4. CASE 4: Zone Restoration with Load Shedding without DG
5.1.5. CASE 5: CASE 2 with DG
5.1.6. CASE 6: CASE 3 with DG
5.1.7. CASE 7: CASE 4 with DG
5.1.8. CASE 8: Load Shedding with DG
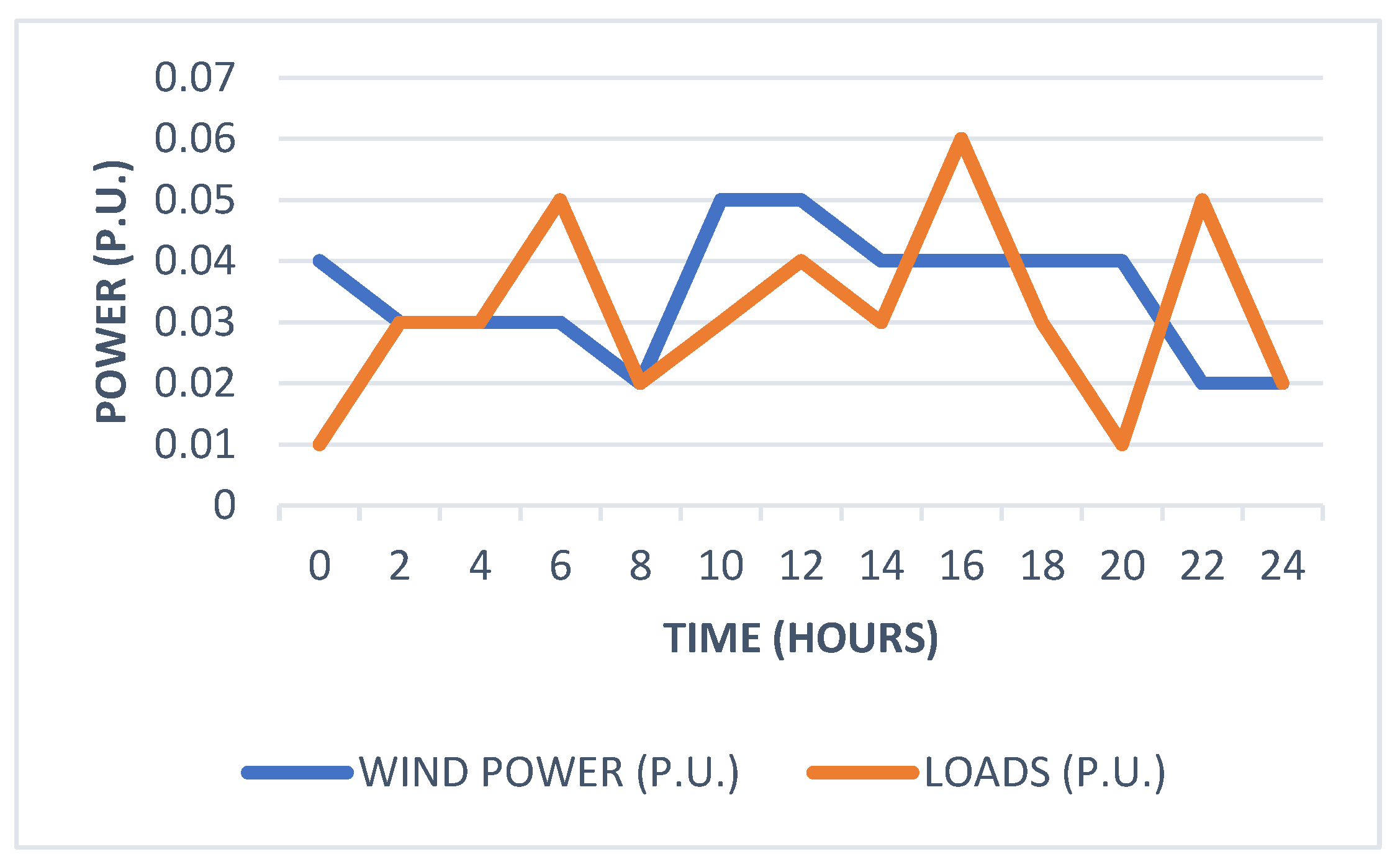
5.2. Multi-Scenario Case Study
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| AFC | Available feeding capacity |
| ANSI | American National Standards Institute |
| BDI | Belief–desire–intention |
| CC | Central controller |
| CFH | Call for help |
| DG | Distributed generator |
| FA | Feeder agent |
| FCB | Feeder circuit breaker |
| FFA | Faulted feeder agent |
| FZA | Faulted zone agent |
| HFA | Helped feeder agent |
| HZA | Helped zone agent |
| JADE | Java Agent Developing Framework |
| LT | Load transfer |
| MAS | Multi-agent system |
| RES | Renewable energy source |
| VTB | Virtual test bed |
| ZA | Zone agent |
| The following symbols are used in this work: | |
| Total number of HFAs | |
| Maximum spare capacity of the restoration path with respect to the current limit constraint | |
| Maximum line current | |
| IS | Maximum spare capacity of the restoration path without violating both current and voltage operating constraints. |
| Is(j) | Available spare capacity of each zone before it gets overloaded |
| Maximum spare capacity in the restoration path with respect to the voltage limit constraint | |
| Zone current change | |
| Current usage of zone j | |
| Li | bus |
| , | Total number of branches and buses respectively |
| Total number of DG units and loads in a micro-grid respectively | |
| Number of switches supplying power to a bus at any given time | |
| Total number of faulted zones | |
| load in micro-grid | |
| DG available feeding capacity | |
| DG | |
| Active power delivered from/to the utility grid taking into account grid losses | |
| Summation of power consumption of micro-grid loads | |
| Mechanical power provided by wind turbine | |
| R | Wind turbine radius |
| branch. | |
| switch in the restored network (i.e., 1 for the closed switch and 0 for the opened one) | |
| switch immediately after the fault has been isolated | |
| Demand of load j in zone i | |
| bus | |
| Maximum and minimum acceptable bus voltages respectively | |
| Vo | Lowest bus voltage magnitude received from the zone agent |
| bus load | |
| Priority of load j in zone i | |
| bus load (i.e., 1 for the restored load and 0 for the unrestored one) | |
| All zone combinations possible for zone transfer | |
| Series impedance of the restoration path | |
| Air density | |
| Wind speed | |
| w | Rotation speed of the wind turbine |
| Tip speed ratio of the wind turbine | |
| Pitch angle of the wind turbine | |
| Wind energy capture coefficient | |
References
- Wu, T.L.; Lu, C.; Su, S. An Autonomous Decision Approach for Fault Allocation and Service Restoration in Electrical Distribution Systems by Multi Agent System. In Proceedings of the Ninth International Conference on Hybrid Intelligent Systems, Salamanca, Spain, 11–13 June 2009; pp. 89–94. [Google Scholar]
- Hu, J.; Lanzon, A. Distributed Finite-time Consensus Control for Heterogeneous Battery Energy Storage Systems in Droop-controlled Microgrids. IEEE Trans. Smart Grid 2019, 10, 4751–4761. [Google Scholar] [CrossRef] [Green Version]
- Saleh, M.S.; Althaibani, A.; Esa, Y.; Mhandi, Y.; Mohamed, A.A. Impact of Clustering Microgrids on their Stability and Resilience during Blackouts. In Proceedings of the International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Offenburg, Germany, 20–23 October 2015; pp. 195–200. [Google Scholar]
- Shirazi, E.; Jadid, S. Autonomous Self-Healing in Smart Distribution Grids Using agent Systems. IEEE Trans. Ind. Inform. 2019, 15, 6291–6301. [Google Scholar] [CrossRef]
- Zidan, A.; El-Saadany, E.F. A Cooperative Multiagent Frame-work for Self-healing Mechanisms in Distribution Systems. IEEE Trans. Smart Grid 2012, 3, 1525–1539. [Google Scholar] [CrossRef]
- Nagata, T.; Sasaki, H. An Efficient Algorithm for Distribution Network Restoration. In Proceedings of the IEEE Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001; pp. 54–59. [Google Scholar]
- Asadi, Q.; Amini, A.; Falaghi, H.; Ramezani, M. A Heuristic Algorithm for Effective Service Restoration Toward Distribution Networks Automation. In Proceedings of the 15th International Conference on Protection and Automation of Power Systems (IPAPS), Shiraz, Iran, 30–31 December 2020; pp. 19–24. [Google Scholar]
- Golshani, A.; Sun, W.; Zhou, Q.; Zheng, Q.P.; Tong, J. Two-Stage Adaptive Restoration Decision Support System for a Self-Healing Power Grid. IEEE Trans. Ind. Inform. 2017, 13, 2802–2812. [Google Scholar] [CrossRef]
- Chen, S.J.; Zhan, T.S.; Huang, C.H.; Chen, J.L.; Lin, C.H. Nontechnical Loss and Outage Detection Using Fractional-Order Self-Synchronization Error-Based Fuzzy Petri Nets in Micro-Distribution Systems. IEEE Trans. Smart Grid 2015, 6, 411–420. [Google Scholar] [CrossRef]
- Lee, H.; Park, Y. A Restoration Aid Expert System for Distribution Substations. IEEE Trans. Power Deliv. 1996, 11, 1765–1770. [Google Scholar] [CrossRef]
- Zidan, A.; Khairalla, M.; Abdrabou, A.M.; Khalifa, T.; Shaban, K.; Abdrabou, A.; El Shatshat, R.; Gaouda, A.M. Fault Detection, Isolation, and Service Restoration in Distribution Systems: State-of-the-Art and Future Trends. IEEE Trans. Smart Grid 2017, 8, 2170–2185. [Google Scholar] [CrossRef]
- Martín, F.; Sánchez, A.; Rivier, M. A Literature Review of Microgrids: A Functional Layer Based Classification. Renew. Sustain. Energy Rev. 2016, 62, 1133–1153. [Google Scholar] [CrossRef]
- Lim, I.; Sidhu, T.S.; Choi, M.S.; Lee, S.J.; Hong, S.; Lim, S.I.; Lee, S.W. Design and Implementation of Multiagent-Based Distributed Restoration System in DAS. IEEE Trans. Power Deliv. 2013, 28, 585–593. [Google Scholar] [CrossRef]
- Hafez, A.A.; Omran, W.A.; Hegazy, Y.G. A Decentralized Technique for Autonomous Service Restoration in Active Radial Distribution Networks. IEEE Trans. Smart Grid 2018, 9, 1911–1919. [Google Scholar] [CrossRef]
- Bagherzadeh, L.; Shayeghi, H.; Pirouzi, S.; Shafie-khah, M.; Catalão, J. Coordinated Flexible Energy and Self-healing Management according to the Multi-agent System-based Restoration Scheme in Active Distribution Network. IET Renew. Power Gener. 2021, 15, 1765–1777. [Google Scholar] [CrossRef]
- Al-Hinai, A.; Alhelou, H.H. A Multi-agent System for Distribution Network Restoration in Future Smart Grids. Energy Rep. 2021, 7, 8083–8090. [Google Scholar] [CrossRef]
- Habib, H.F.; Youssef, T.; Cintuglu, M.H.; Mohammed, O. A Multi-Agent Based Technique for Fault Location, Isolation and Service Restoration. IEEE Trans. Ind. Appl. 2017, 53, 1841–1851. [Google Scholar] [CrossRef]
- Nagata, T.; Sasaki, H. A Multi-Agent Approach to Power System Restoration. IEEE Trans. Power Syst. 2002, 17, 457–462. [Google Scholar] [CrossRef]
- Solanki, J.M.; Khushalani, S.; Schulz, N.N. A Multi-Agent Solution to Distribution Systems Restoration. IEEE Trans. Power Syst. 2007, 22, 1026–1034. [Google Scholar] [CrossRef]
- Tsai, M.; Pan, Y. Application of BDI-based Intelligent Multi-agent Systems for Distribution System Service Restoration Planning. Eur. Trans. Electr. Power 2011, 21, 1783–1801. [Google Scholar] [CrossRef]
- Chellaswamy, I.; Rani, S.P.J. Automatic Fault Isolation and Restoration of Distribution System using JADE-based Multi-Agents. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 2226–2242. [Google Scholar] [CrossRef]
- Ye, D.; Zhang, M.; Sutanto, D. A Hybrid Multiagent Framework with Q-learning for Power Grid Systems Restoration. IEEE Trans. Power Syst. 2011, 26, 2434–2441. [Google Scholar] [CrossRef]
- Martins, F.A.; Batista de Almeida, A. Automatic Power Restoration in Distribution Systems Modeled through Multi-agent Systems. IEEE Lat. Am. Trans. 2020, 18, 1768–1776. [Google Scholar] [CrossRef]
- Paliwal, P.; Patidar, N.P.; Nema, R.K. Planning of Grid Integrated Distributed Generators: A Review of Technology, Objectives and Techniques. Renew. Sustain. Energy Rev. 2014, 40, 557–570. [Google Scholar] [CrossRef]
- Eddy, Y.S.; Gooi, H.B.; Chen, S.X. Multi-Agent System for Distributed Management of Microgrids. IEEE Trans. Power Syst. 2015, 30, 24–34. [Google Scholar] [CrossRef]
- American National Standards Institute Report (ANSI C84.1-2020): Electric Power Systems Voltage Ratings (60 Hz). Available online: https://www.nema.org/docs/default-source/news-document-library/nema-espg.pdf (accessed on 15 April 2021).
- Pipattanasomporn, M.; Feroze, H.; Rahman, S. Multi-agent Systems in a Distributed Smart Grid: Design and Implementation. In Proceedings of the IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009; pp. 1–8. [Google Scholar]
- Yu, H.; Luan, W.; Sheng, W.; Liu, H.; Ma, W. Evaluation of the Standardization Needs of Microgrids Technology. In Proceedings of the 5th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Changsha, China, 26–29 November 2015; pp. 2144–2148. [Google Scholar]
- Ciric, R.; Popovic, D. Multi-objective Distribution Network Restoration using Heuristic Approach and Mix Integer Programming Method. Electr. Power Energy Syst. 2000, 22, 497–505. [Google Scholar] [CrossRef]
- Xing, C.; Xi, X.; He, X.; Liu, M. Research on the MPPT Control Simulation of Wind and Photovoltaic Complementary Power Generation System. In Proceedings of the IEEE Sustainable Power and Energy Conference (ISPEC), Chengdu, China, 23–25 November 2020; pp. 1058–1063. [Google Scholar]
- Das, D. Reconfiguration of Distribution System using Fuzzy Multi-objective Approach. Electr. Power Energy Syst. 2006, 28, 331–338. [Google Scholar] [CrossRef]
- JADE Agent Development Toolkit. Available online: http://jade.tilab.com (accessed on 3 January 2021).
- Robinson, C.R.; Mendham, P.; Clarke, T. MACSimJX: A Tool for Enabling Agent Modelling with Simulink using JADE. J. Phys. Agents 2010, 4, 1–7. [Google Scholar] [CrossRef] [Green Version]
- SG 6.6.-170: Onshore wind turbine. Available online: https://www.siemensgamesa.com/products-and-services/onshore/wind-turbine-sg-5-8-170 (accessed on 7 July 2021).
- Zhang, Y.; Tang, X.; Qi, Z.; Liu, Z. The Ragone plots guided sizing of hybrid storage system for taming the wind power. Int. J. Electr. Power Energy Syst. 2015, 65, 1016. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Fault Location | Loading Period | Faulted Zones/ Demand | DG Existence | AFC of DG in p.u. | , Tie Voltage | Switching Actions Service Restoration | No of Switching Actions | Minimum Bus Voltage | Load Shed |
|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 | Zone Za7 of Feeder “A” | Light Load Period | Za8 to Za10/ 0.1254 p.u. | ✗ | ----- | Feeder C: 0.2038 p.u., 0.9589 p.u., Feeder D: 0.2586 p.u., 0.9812 p.u. | - Close T3 -Feeder D restores Za8 toZa10 | 1 | 0.9616 p.u. at Za10 | ---- |
| Case 2 | Zone Za1 of Feeder “A” | Light Load Period | Za2 to Za10/ 0.3454 p.u. | ✗ | ----- | Feeder B: 0.1615 p.u., 0.9766 p.u., Feeder C: 0.2014 p.u., 0.9663 p.u., Feeder D: 0.2577 p.u., 0.9836 p.u. | -Open S6, S11 -Close T1, T2, T3 -Feeder B restores Za2 to Za5 -Feeder C restores Za10 -Feeder D restores Za6 to Za9 | 5 | 0.953 3p.u. at Za5 | ---- |
| Case 3 | Zone Za7 of Feeder “A” | High Load Period | Za8 to Za10/ 0.1654 p.u. | ✗ | ----- | Feeder B: 0.1615 p.u., 0.9766 p.u., Feeder C: 0.0759 p.u., 0.9576 p.u., Feeder D: 0.0786 p.u., 0.9755 p.u. | -Open S11, S18 -Close T2, T3, T4 Feeder C restores Za10 by load transfer to HFA “B” -Feeder D restores Za8 to Za9 | 5 | 0.95 p.u. at Za10 | ---- |
| Case 4 | Zone Za1 of Feeder “A” | High Load Period | Za2 to Za10/ 0.36502 p.u. | ✗ | ----- | Feeder B: 0.1141 p.u., 0.9739 p.u., Feeder D: 0.1531 p.u., 0.9803 p.u. | -Open S5, S8 -Close T1, T3 -Feeder B restores Za2 to Za4 -Feeder D restores Za8 toZa10 | 4 | 0.959 p.u. at Za2 and Za10 | Za5, Za6, Za7 |
| Case 5 | Zone Za1 of Feeder “A” | Light Load Period | Za2 to Za10/ 0.3454 p.u. | ✓ | MG1: 0.042 MG3: 0.035 | Feeder B: 0.2 p.u., 0.9783 p.u., Feeder D: 0.286 p.u., 0.982 p.u. | -Open S6 -Close T1, T3 -Feeder B restores Za2 to Za5 -Feeder D restores Za6 toZa10 | 3 | 0.9539 p.u. at Za6 | ---- |
| Case 6 | Zone Za7 of Feeder “A” | High Load Period | Za8 to Za10/ 0.1654 p.u. | ✓ | MG2: 0.035. MG3: 0.008. | Feeder C: 0.11 p.u., 0.9608 p.u., Feeder D: 0.088 p.u., 0.971 p.u. | -Open S11 -Close T2, T3 -Feeder C restores Za10 -Feeder D restores Za8 to Za9 | 3 | 0.953 p.u. at Za10 | ---- |
| Case 7 | Zone Za1 of Feeder “A” | High Load Period | Za2 to Za10/ 0.36502 p.u. | ✓ | MG1: 0.042 MG2: 0.035 MG3: 0.008 | Feeder B: 0.157 p.u., 0.9758 p.u., Feeder C: 0.11 p.u., 0.9608 p.u., Feeder D: 0.162 p.u., 0.982 p.u. | -Open S6, S11 -Close T1, T2, T3 -Feeder B restores Za2 to Za5 -Feeder C restores Za10 -Feeder D restores Za6 to Za9 | 5 | 0.95 p.u. at Za10 | ---- |
| Case 8 | Zone Za1 of Feeder “A” | High Load Period | Za2 to Za10/ 0.36502 p.u. | ✓ | MG1: 0.022 MG2: 0.015 MG3: 0.008 | Feeder B: 0.137 p.u., 0.9758 p.u., Feeder C: 0.09 p.u., 0.9608 p.u., Feeder D: 0.162 p.u., 0.9774 p.u. | -Open S5, S6, S11 -Close T1, T2, T3 -Feeder B restores Za2 to Za4 -Feeder C restores Za10 -Feeder D restores Za6 to Za9 | 6 | 0.95 p.u. at Za10 | Za5 |
| Feeder A Zone Numbers | Weight Factor |
|---|---|
| Za1, Za3, Za4, Za9, Za10 | 3 |
| Za2, Za7, Za8 | 2 |
| Za5, Za6 | 1 |
| Interval | Fault Location | Faulted Zones/Demand | DG Contribution | AFC of DG in p.u. | Total Maximum AFC at Helped , Tie Voltage | Switching Actions for Service Restoration | Minimum Bus Voltage | Load Shed |
|---|---|---|---|---|---|---|---|---|
| 0.2 to 0.8 s | Zone Za6 of Feeder “A” | Za7 to Za10/ 0.157 p.u. | ✗ | --------- | Feeder C: 0.0755 p.u., 0.9608 p.u., Feeder D: 0.1536 p.u., 0.9774 p.u. | -Open S11 -Close T2, T3 -Feeder C restores Za10 -Feeder D restores Za7 to Za9 | 0.95 p.u. at Za10 | ---- |
| 1.2 to 2 s | Zone Za2 of Feeder “A” | Za3 to Za10/ 0.33 p.u. | ✓ | MG1: 0.035 MG2: 0.022 MG3: 0.022 | Feeder B: 0.15 p.u., 0.9758 p.u., Feeder C: 0.097 p.u., 0.9687 p.u., Feeder D: 0.175 p.u., 0.9802 p.u. | -Open S11 -Close T1, T2, T3 -Feeder B restores Za3 & Za4 -Feeder C restores Za10 -Feeder D restores Za5 to Za9 | 0.953 p.u. at Za5 | ---- |
| 2 to 2.5 s | Zone Za2 of Feeder “A” | Za3 to Za10/ 0.33 p.u. | ✓ | MG1: 0.005 MG2: 0.002 MG3: 0.002 | Feeder B: 0.12 p.u., 0.97 p.u., Feeder C: 0.077 p.u., 0.959 p.u., Feeder D: 0.155 p.u., 0.976 p.u. | -Open S6, S11 -Close T1, T2, T3 -Feeder B restores Za3 & Za4 -Feeder C restores Za10 -Feeder D restores Za6 to Za9 | 0.95 p.u. at Za10 | Za5 |
| PAPERS | Fault Location and Isolation | Service Restore | Voltage and Current Constraints | Load Priorities | Suitable for Large Systems? | Multi-Case Study | DG Penetration | Main Agents | Applied Computer Resources | Complexity | Restoration Speed | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| System Design | Agents Design | |||||||||||
| [4] | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Feeder, Switch, Zone, and DG Agents | MATLAB–NETLOGO Extension | NETLOGO | High | Low |
| [14] | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Zone Agent | MATLAB | JADE | Low | High |
| [15] | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Zone Agent | Undefined | Low | High | |
| [16] | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Initiator and Zone Agents | MATLAB | JADE | Average | Average |
| [17] | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | Load, Section, Restoration, and Generator Agents | MATLAB | JADE | High | Low |
| [18] | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ | ✗ | Facilitator and Bus Agents | Undefined | Average | Average | |
| [19] | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ | ✗ | Generator, Switch, and Load Agents | VTB | JADE | High | Low |
| [20] | ✓ | ✓ | ✓ | ✗ | ✓ | ✓ | ✗ | Switch Agent | Undefined | JADE | Low | High |
| [21] | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | ✗ | Recloser, Feeder Section, and Smart Switch Agents | MATLAB | JADE | Average | Average |
| [22] | ✓ | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ | Generator, Switch, and Load Agents | Undefined | High | Low | |
| [23] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✗ | Substation, Line, and Device Agents | SMAs | JADE | High | Low |
| Proposed | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Zone and Feeder Main Agents + additional Micro-grid Agent | MATLAB | JADE | Average | Average |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelhamid, A.M.; Zakzouk, N.E.; El Safty, S. A Multi-Agent Approach for Self-Healing and RES-Penetration in Smart Distribution Networks. Mathematics 2022, 10, 2275. https://doi.org/10.3390/math10132275
Abdelhamid AM, Zakzouk NE, El Safty S. A Multi-Agent Approach for Self-Healing and RES-Penetration in Smart Distribution Networks. Mathematics. 2022; 10(13):2275. https://doi.org/10.3390/math10132275
Chicago/Turabian StyleAbdelhamid, Ahmed Maged, Nahla E. Zakzouk, and Samah El Safty. 2022. "A Multi-Agent Approach for Self-Healing and RES-Penetration in Smart Distribution Networks" Mathematics 10, no. 13: 2275. https://doi.org/10.3390/math10132275
APA StyleAbdelhamid, A. M., Zakzouk, N. E., & El Safty, S. (2022). A Multi-Agent Approach for Self-Healing and RES-Penetration in Smart Distribution Networks. Mathematics, 10(13), 2275. https://doi.org/10.3390/math10132275