
Robust Self-Learning PID Control of an Aircraft Anti-Skid Braking System

Abstract
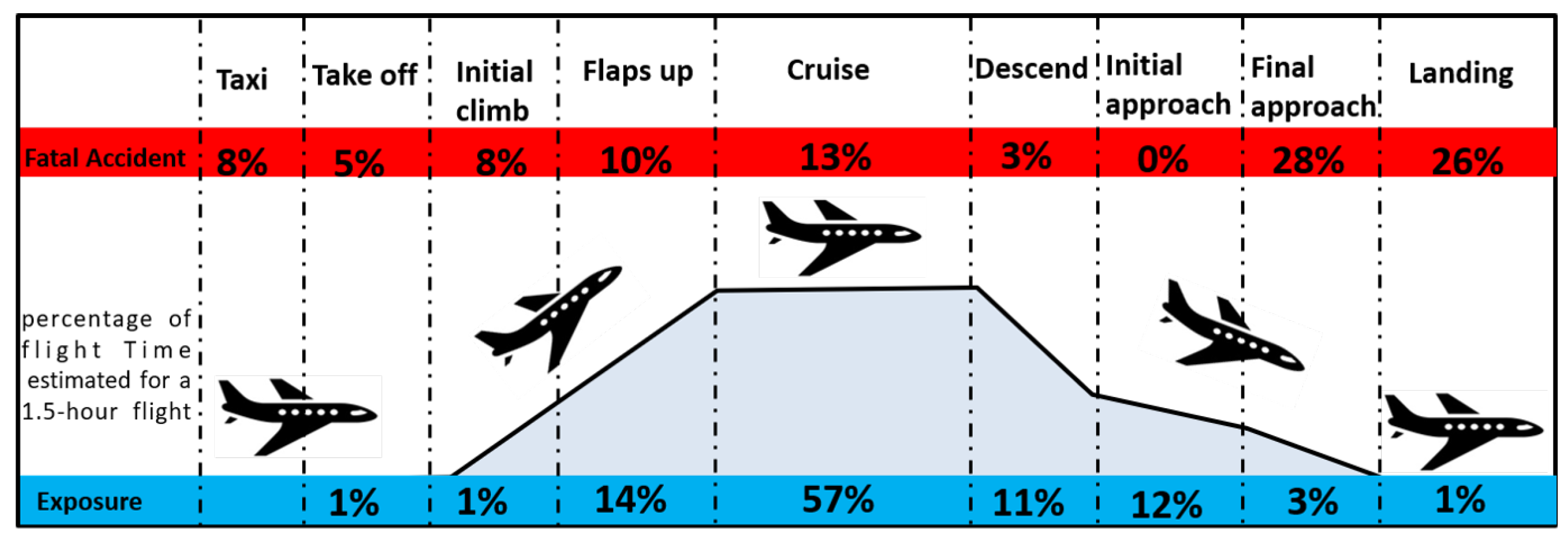
:1. Introduction to an Aircraft Anti-Skid Braking System
2. ABS Dynamics and Control Problem
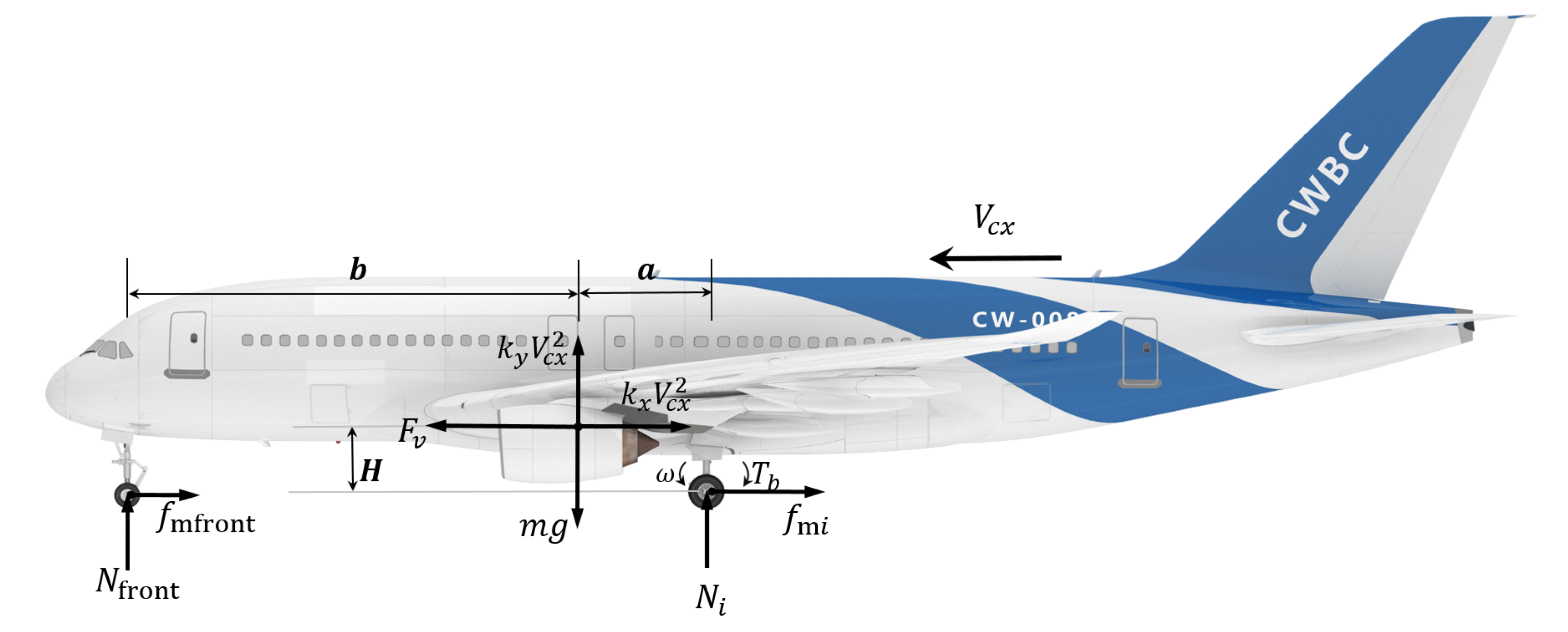
2.1. Aircraft Dynamics during the Braking Process
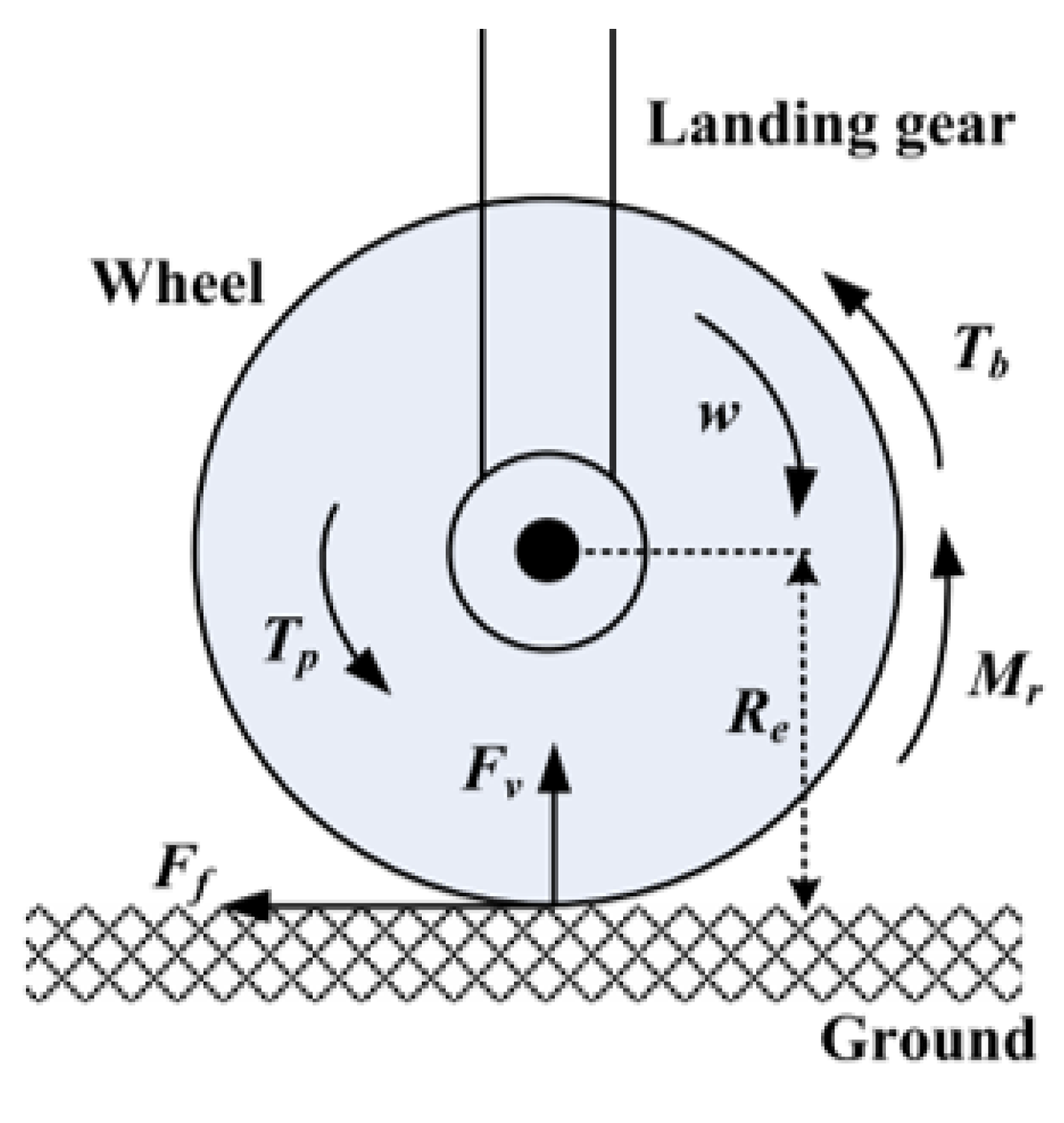
2.2. Dynamics of Wheel and Tire
2.3. Brake Actuator Dynamics
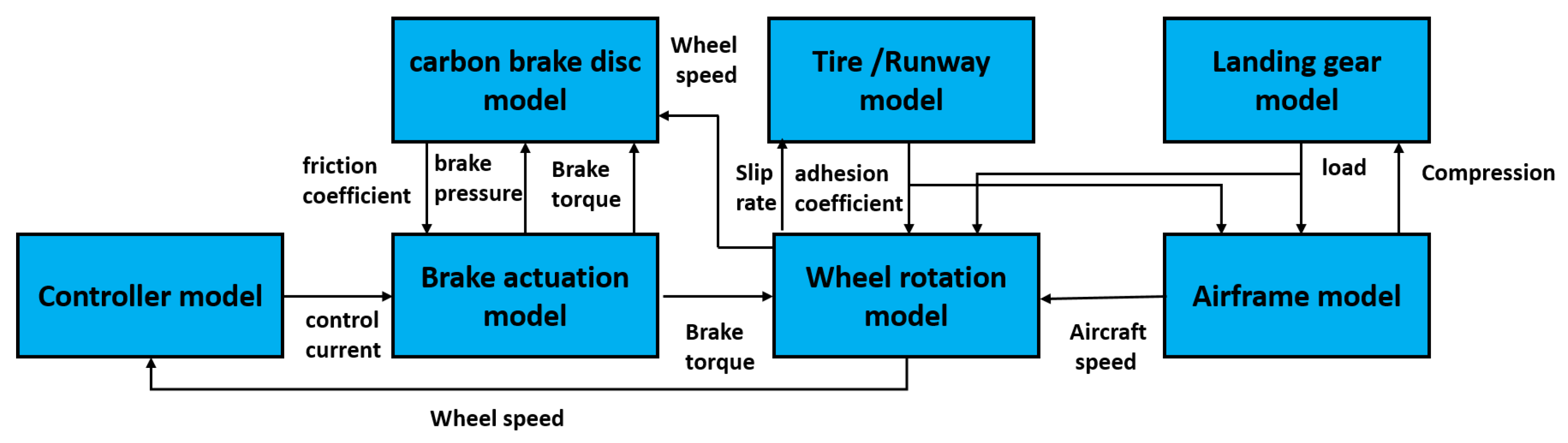
2.4. Overall Dynamics of the Aircraft Anti-Skid Braking Process
3. Problem Formulation
- The aircraft should maintain a straight taxiing direction.
- The fuselage and landing gear are ideal rigid bodies. The aircraft fuselage has no vertical and pitch displacement.
- The vertical load is evenly distributed, and the friction between the left and right wheels is symmetrical.
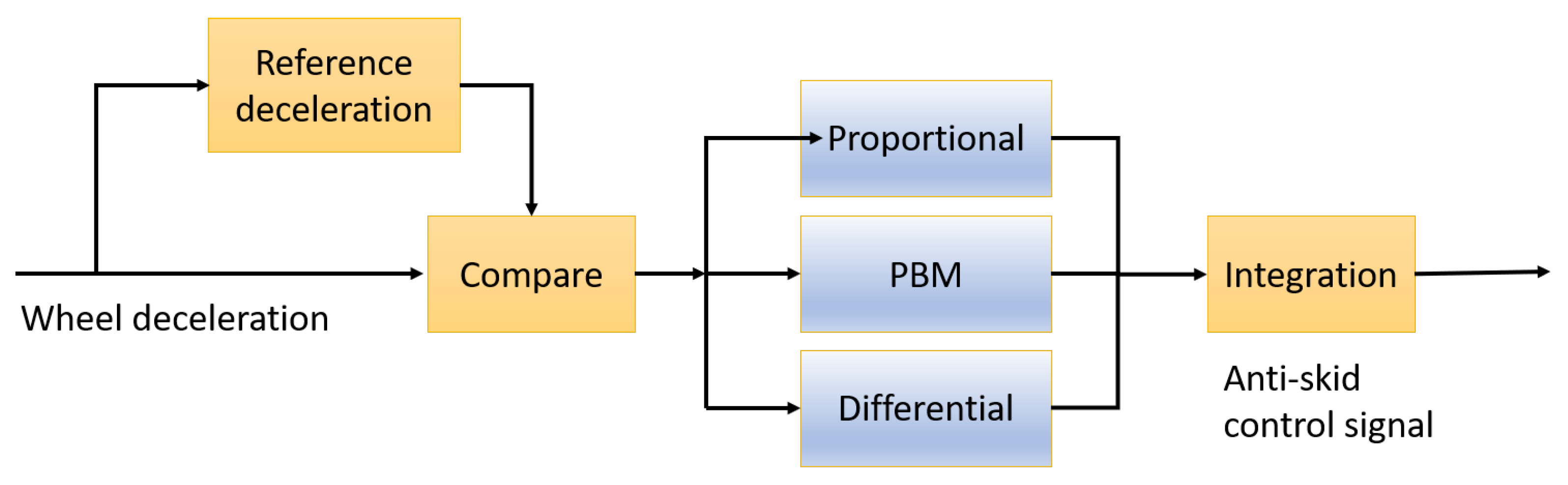
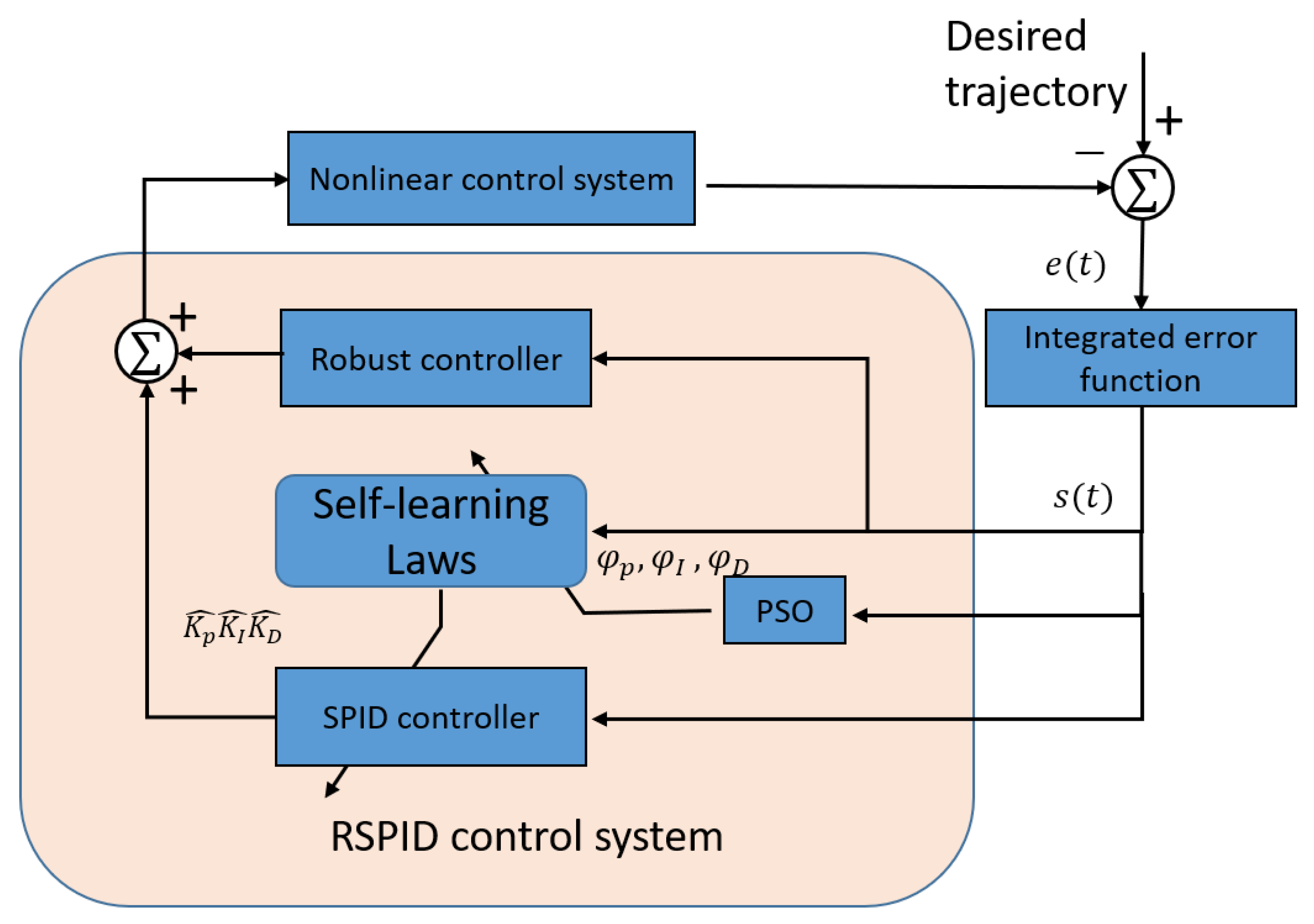
4. Robust Self-Learning PID (RSPID) Control System Design
4.1. The Design of an SPID Controller
4.2. The Design of the Robust Controller
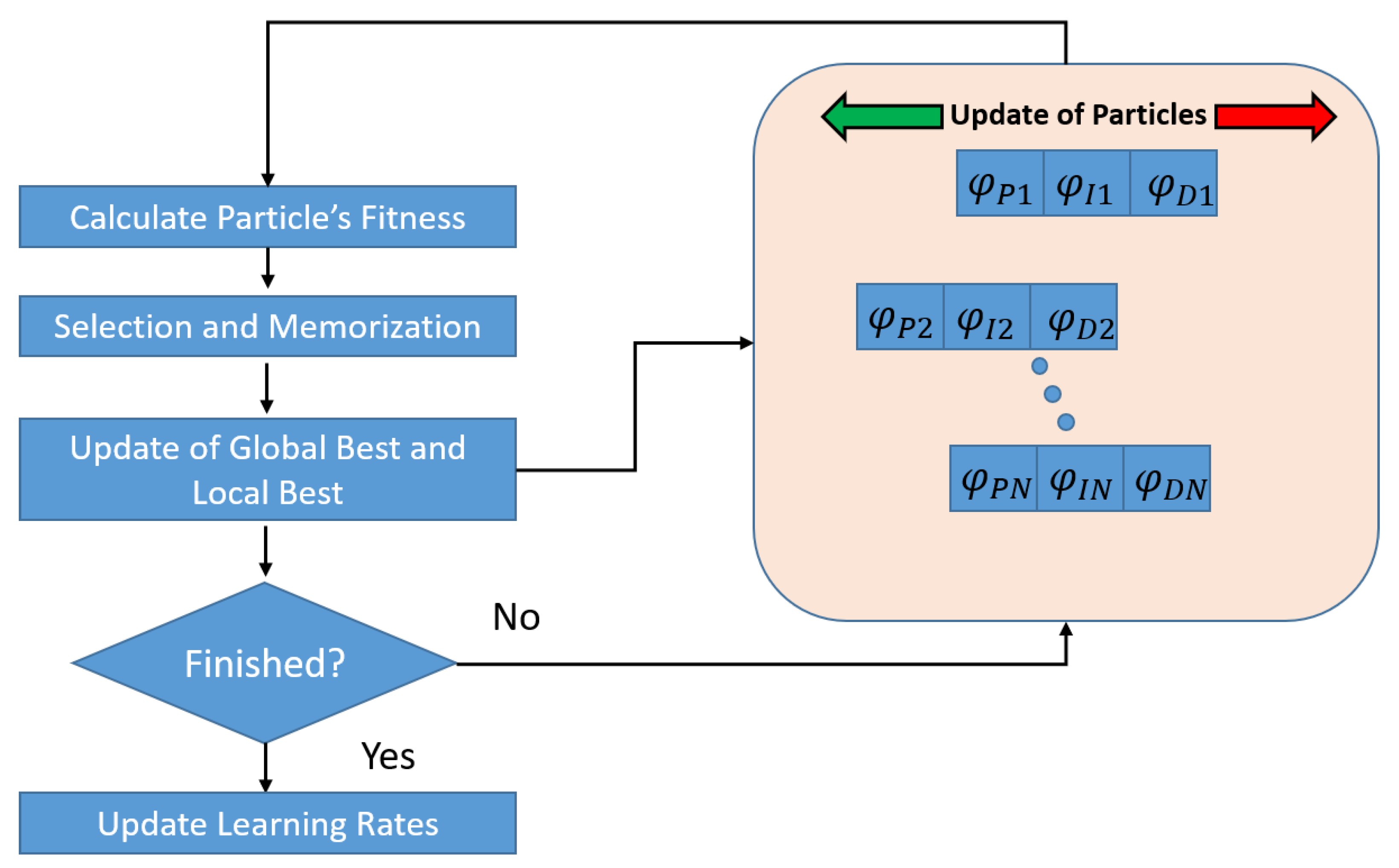
4.3. The Design of the Particle Swarm Optimization Algorithm
5. Simulation Results and Discussion
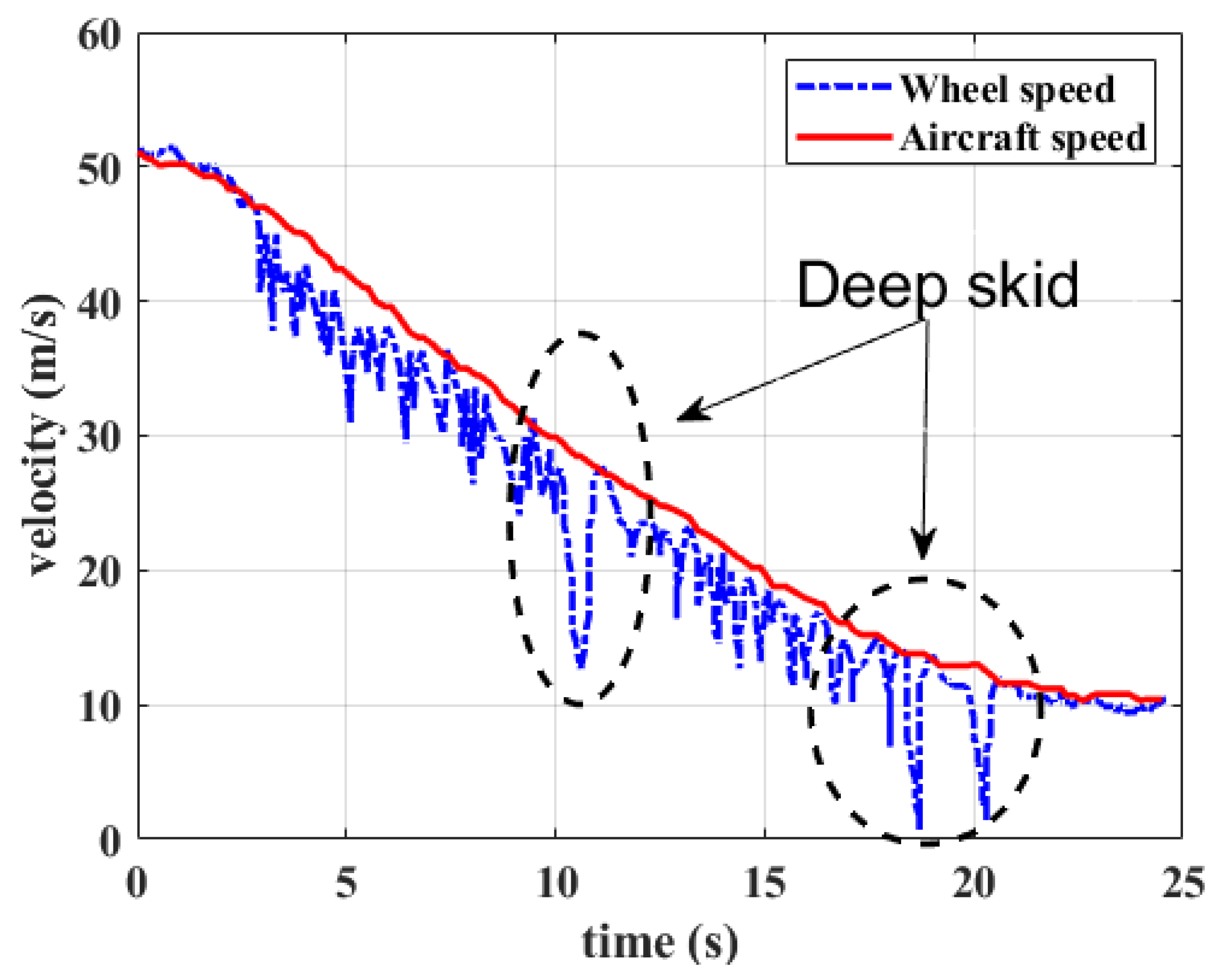
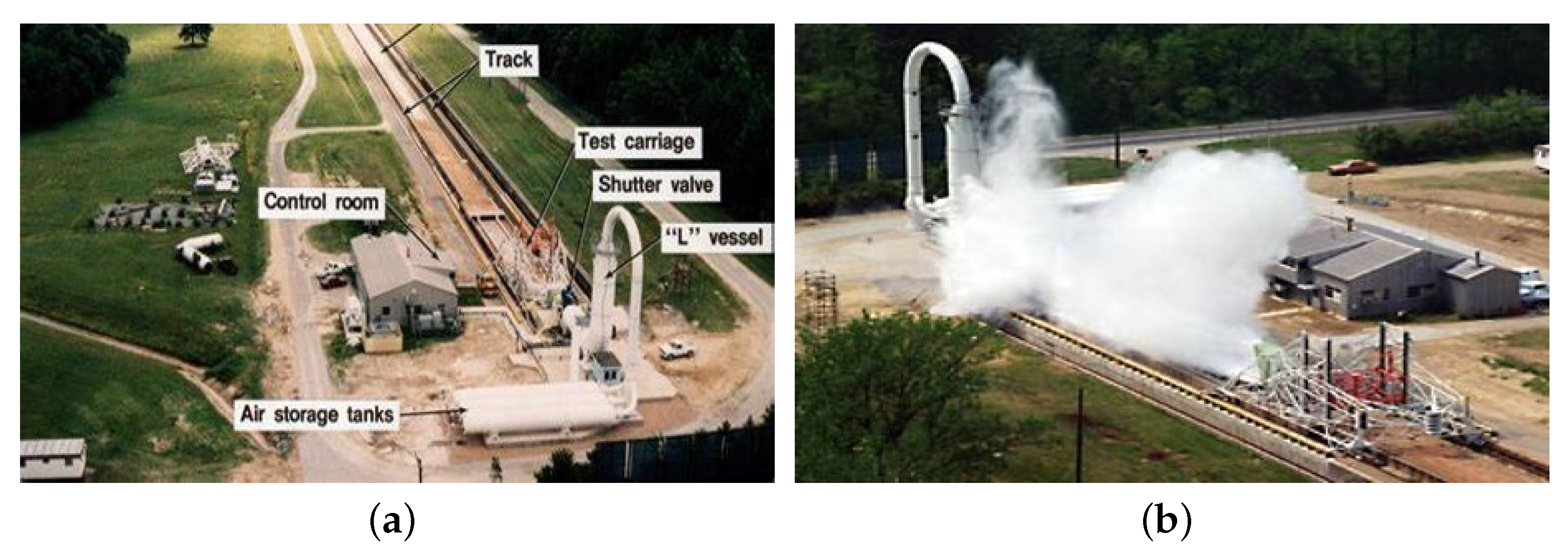
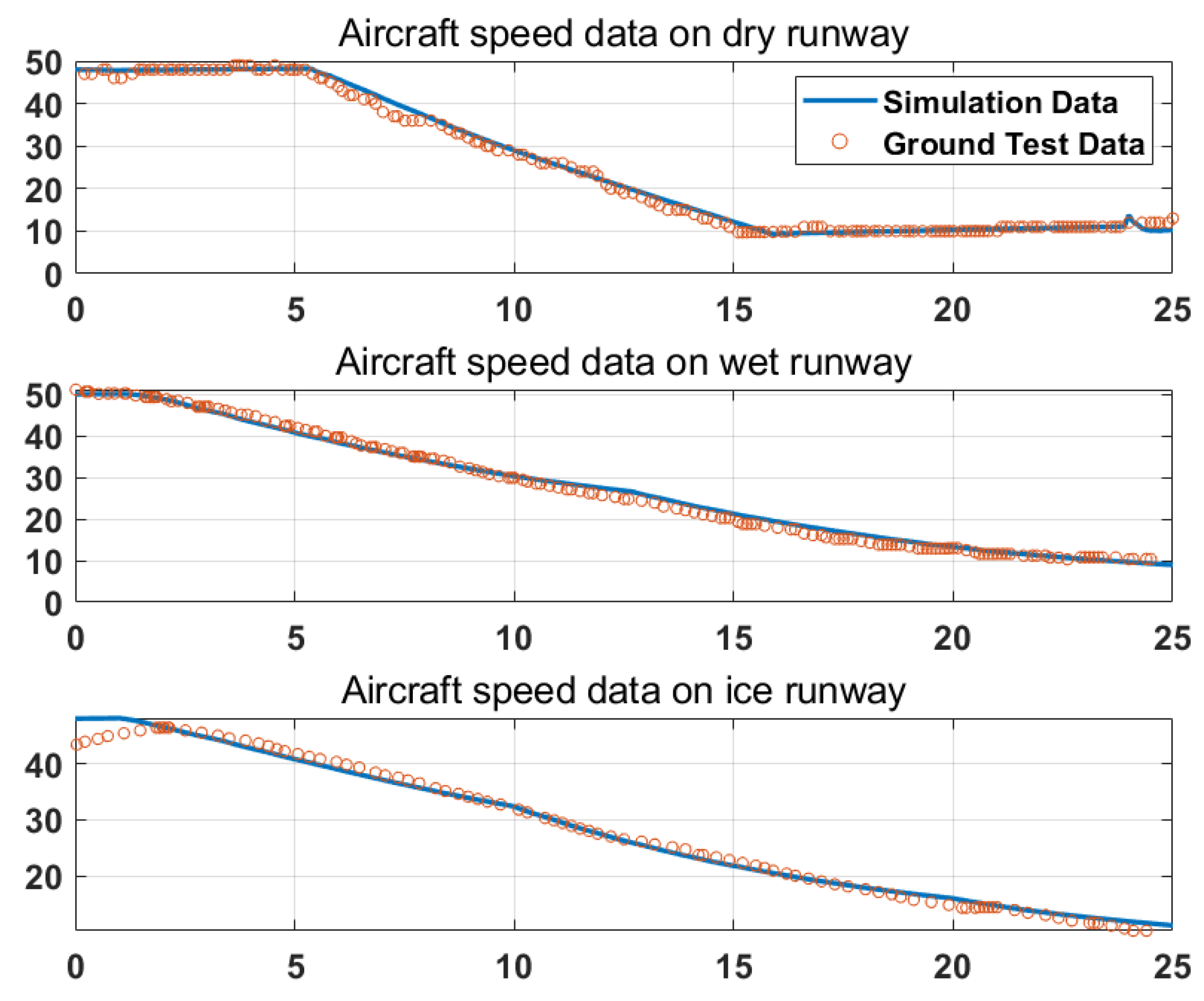
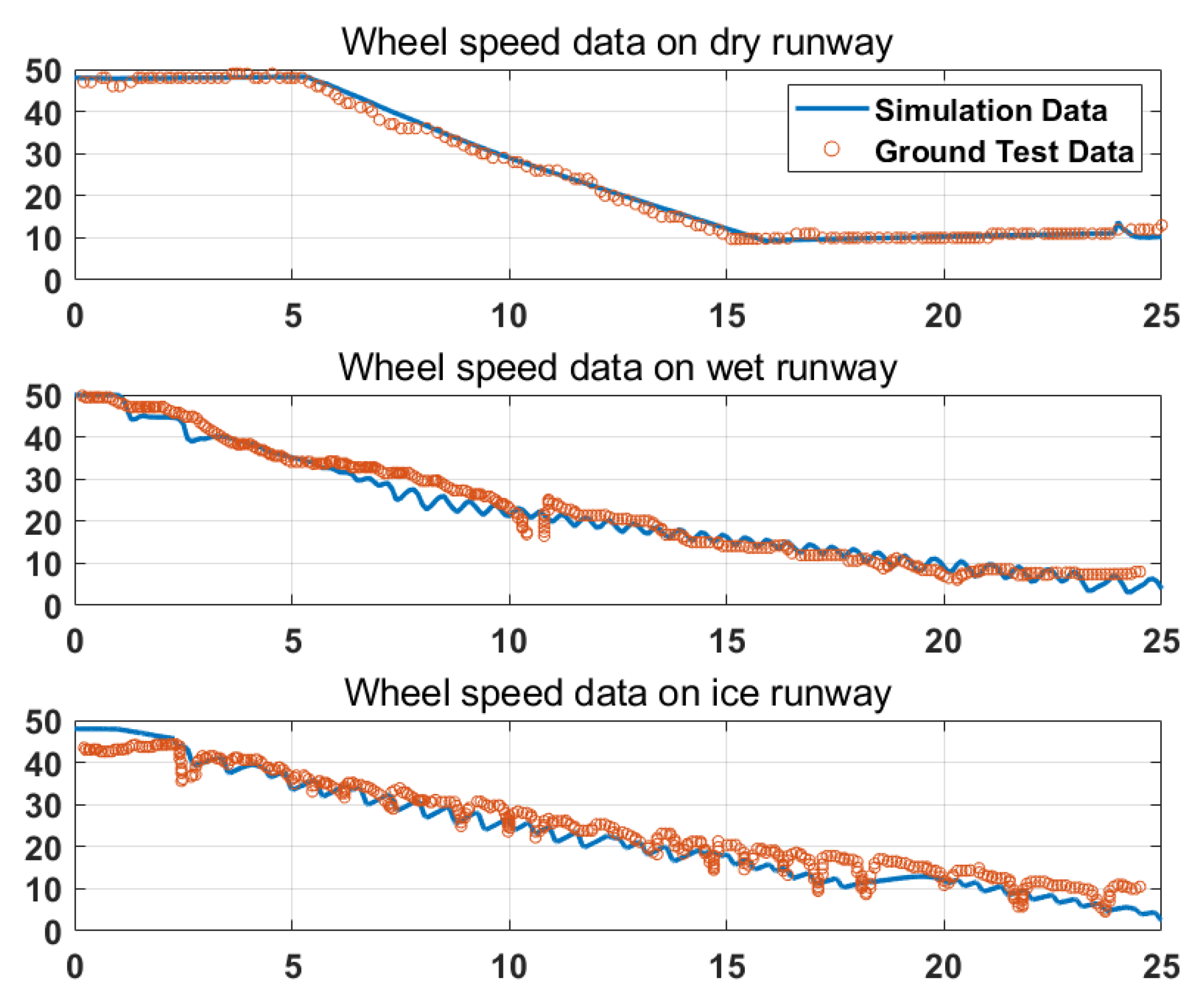
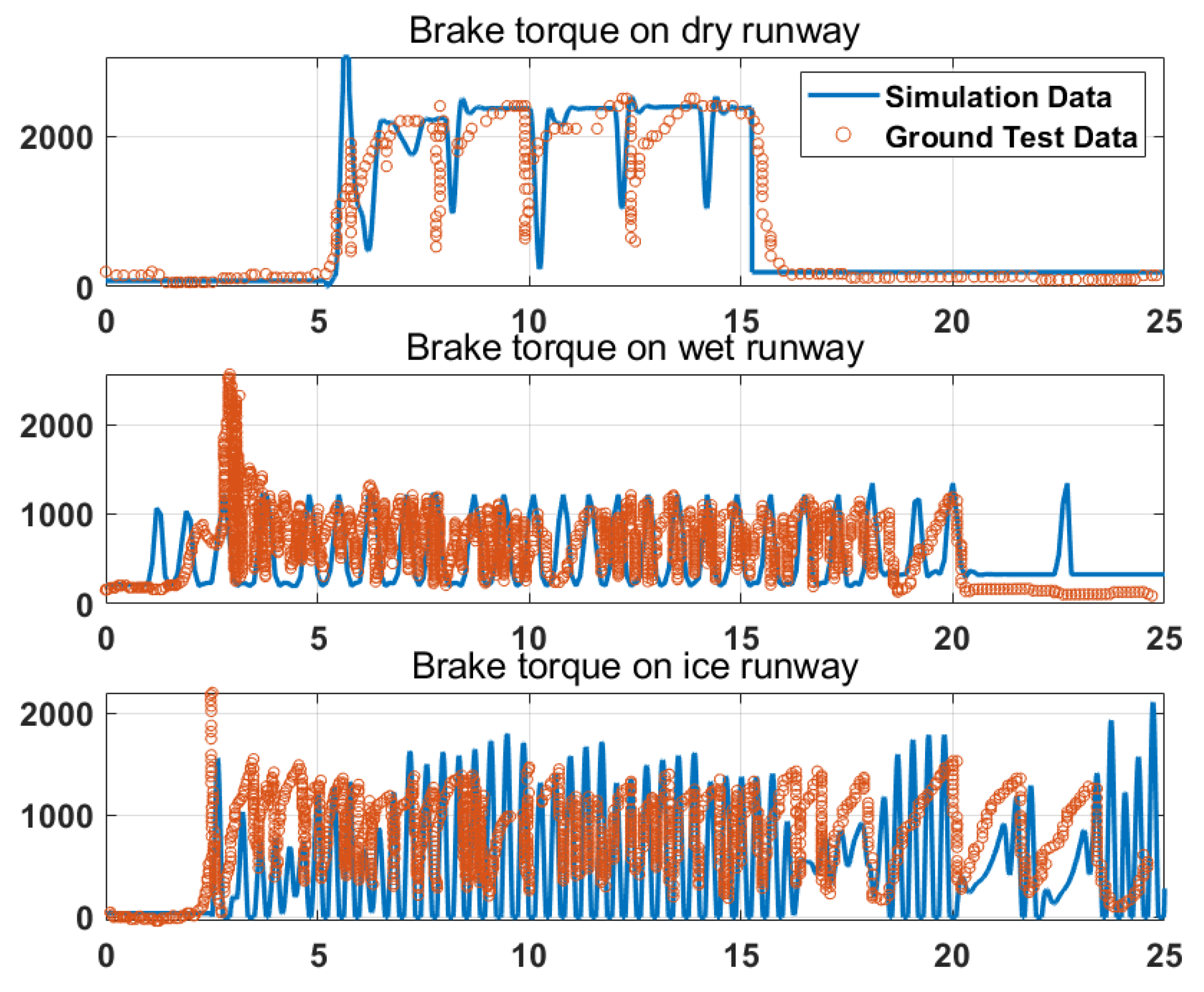
5.1. Model Verification
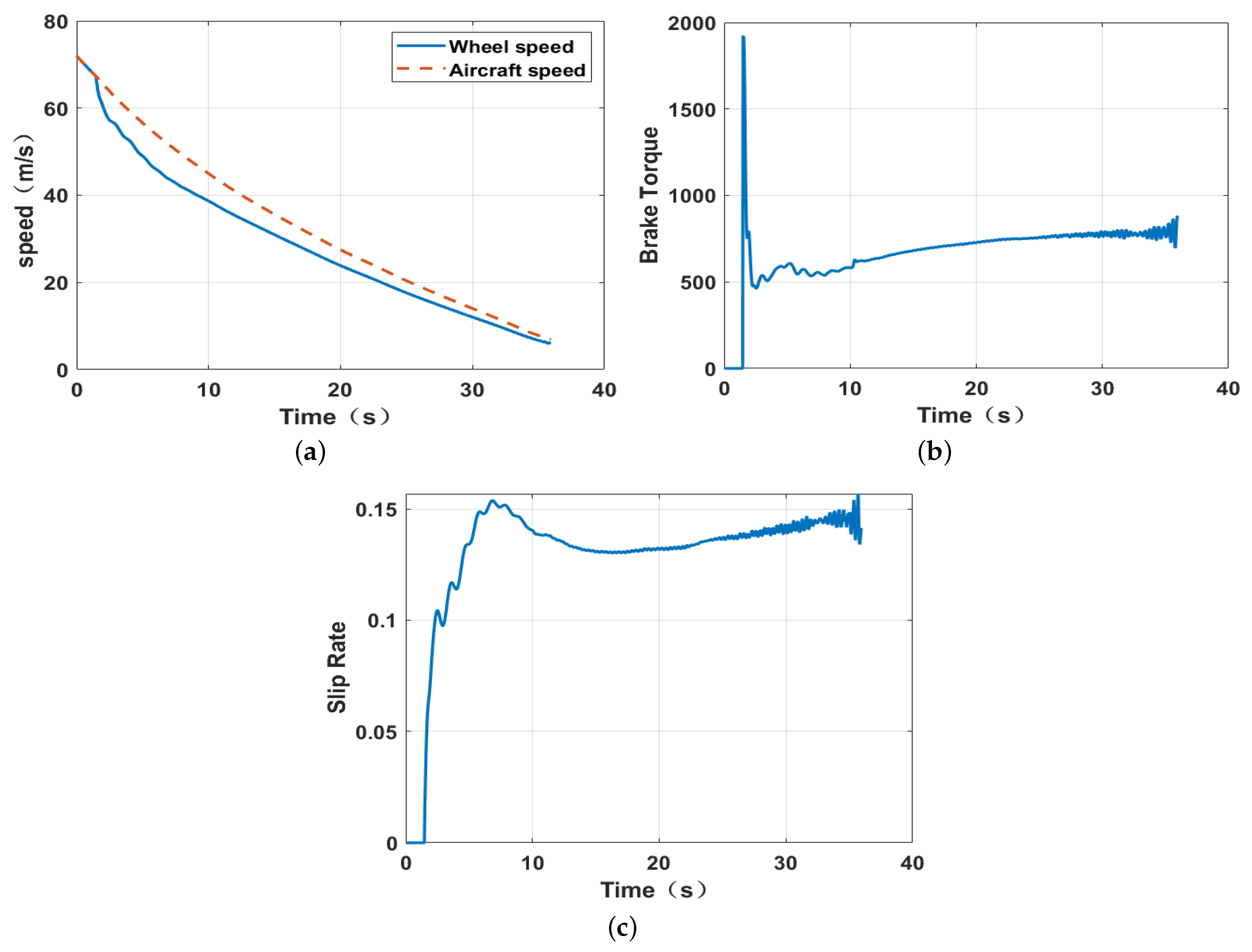
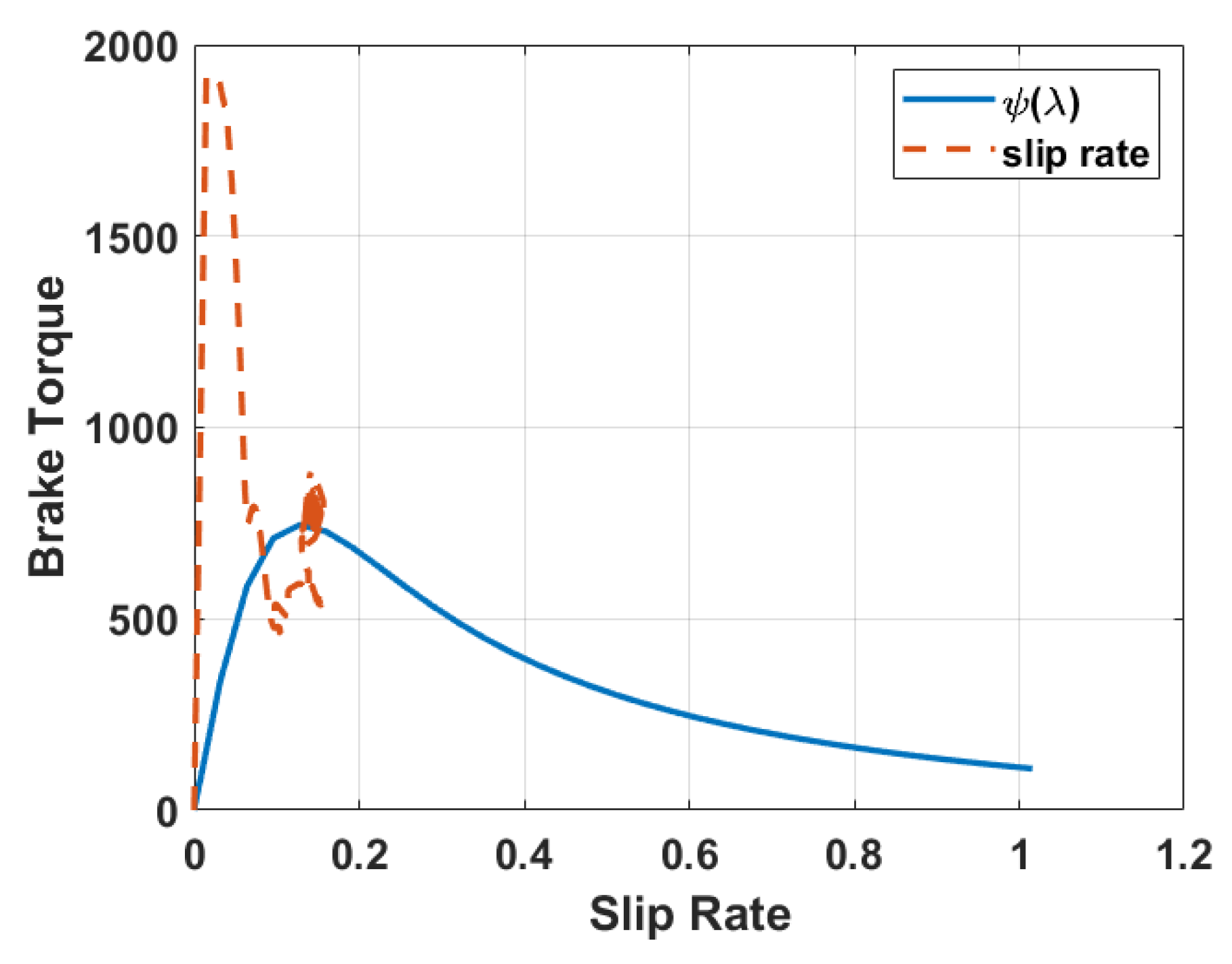
5.2. Simulation Results of the Proposed Controller
5.3. Algorithm Robustness Proof and Simulation Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Boeing. Statistical Summary of Commercial Jet Airplane Accidents. 2021. Available online: https://www.boeing.com/company/about-bca/aviation-safety.page/ (accessed on 1 April 2022).
- Hoseinnezhad, R.; Bab-Hadiashar, A. Efficient Antilock Braking by Direct Maximization of Tire–Road Frictions. IEEE Trans. Ind. Electron. 2011, 58, 3593–3600. [Google Scholar] [CrossRef]
- Park, G.; Choi, S.B. Clamping force control based on dynamic model estimation for electromechanical brakes. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 232, 2000–2013. [Google Scholar] [CrossRef]
- Kiencke, U.; Nielsen, L. Automotive Control Systems; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Zheng, T.X.; Ma, F. Automotive ABS control strategy based on logic threshold. J. Traffic Transp. Eng.-Engl. Ed. 2010, 10, 69–74. [Google Scholar]
- Layne, J.R.; Passino, K.M.; Yurkovich, S. Fuzzy learning control for antiskid braking systems. IEEE Trans. Control Syst. Technol. 1993, 1, 122–129. [Google Scholar] [CrossRef]
- Liu, W.S.; Wang, X.; Yun-Zhu, M.A. A Fuzzy Neural Network Control of Anti-Skid Braking System Based on Unscented Kalman Filter (UKF). APMT 2017, 53, 25–31. [Google Scholar]
- Peric, S.; Antic, D.; Mitic, D.; Nikolic, S.; Milojkovic, M. Generalized Quasi-Orthogonal Polynomials Applied in Sliding Mode-based Minimum Variance Control of ABS. Acta Polytech. Hung. 2020, 17, 165–182. [Google Scholar] [CrossRef]
- Antic, D.; Mitic, D.; Jovanovic, Z.; Peric, S.; Milojkovic, M.; Nikolic, S. Sliding Mode Based Anti-Lock Braking System Control; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Vodovozov, V.; Petlenkov, E.; Aksjonov, A.; Raud, Z. Neural Network Control of Green Energy Vehicles with Blended Braking Systems. Renew. Energy 2021, 19, 344–349. [Google Scholar] [CrossRef]
- He, H.; Wang, C.; Jia, H.; Cui, X. An intelligent braking system composed single-pedal and multi-objective optimization neural network braking control strategies for electric vehicle. Appl. Energy 2020, 259, 114172. [Google Scholar] [CrossRef]
- Lin, W.C.; Lin, C.; Hsu, P.M.; Wu, M.T. Realization of Anti-Lock Braking Strategy for Electric Scooters. IEEE Trans. Ind. Electron. 2014, 61, 2826–2833. [Google Scholar] [CrossRef]
- Incremona, G.P.; Regolin, E.; Mosca, A.; Ferrara, A. Sliding mode control algorithms for wheel slip control of road vehicles. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 4297–4302. [Google Scholar]
- Mishra, S.; Kumar, P.; Rahman, M.S. Optimal design for slip deceleration control in anti-lock braking system. AIP Conf. Proc. 2018, 1953, 130006. [Google Scholar]
- Mirzaei, M.; Mirzaeinejad, H. Optimal design of a non-linear controller for anti-lock braking system. Transp. Res. Part C Emerg. Technol. 2012, 24, 19–35. [Google Scholar] [CrossRef]
- Chereji, E.; Radac, M.B.; Szedlak-Stînean, A.I. Sliding Mode Control Algorithms for Anti-Lock Braking Systems with Performance Comparisons. Algorithms 2021, 14, 2. [Google Scholar] [CrossRef]
- Bhandari, R.; Patil, S.; Singh, R.K. Surface prediction and control algorithms for anti-lock brake system. Transp. Res. Part C Emerg. Technol. 2012, 21, 181–195. [Google Scholar] [CrossRef]
- Atia, M.R.A.; Haggag, S.; Kamal, A.M.M. Enhanced Electromechanical Brake-by-Wire System Using Sliding Mode Controller. J. Dyn. Syst. Meas. Control-Trans. ASM 2016, 138, 041003. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, Y.; Han, M.S.; Lian, Q. Adaptive Fuzzy Fractional-Order Sliding Mode Controller Design for Antilock Braking Systems. J. Dyn. Syst. Meas. Control-Trans. ASM 2016, 138, 041008. [Google Scholar] [CrossRef]
- Abzi, I.; Kabbaj, M.N.; Benbrahim, M. Robust Adaptive fractional-order sliding mode controller for vehicle longitudinal dynamic. In Proceedings of the 2020 17th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 20–23 July 2020; pp. 1128–1132. [Google Scholar]
- Hua, Y. Research on Adaptive Grey Sliding Mode Control Algorithm for Anti-lock Braking System of Vehicle. Com. Simu 2012, 29, 326–330. [Google Scholar]
- Nyandoro, O.T.; Pedro, J.O.; Dwolatzky, B.; Dahunsi, O.A. State Feedback Based Linear Slip Control Formulation for Vehicular Antilock Braking System. In Proceedings of the World Congress on Engineering, London, UK, 6–8 July 2011. [Google Scholar]
- Radac, M.B.; Precup, R. Data-driven model-free slip control of anti-lock braking systems using reinforcement Q-learning. Neurocomputing 2018, 275, 317–329. [Google Scholar] [CrossRef]
- Radac, M.B.; Precup, R.; Roman, R.C. Anti-lock braking systems data-driven control using Q-learning. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 418–423. [Google Scholar]
- Yager, T.J.; Vogler, W.A.; Baldasare, P. Evaluation of Two Transport Aircraft and Several Ground Test Vehicle Friction Measurements Obtained for Various Runway Surface Types and Conditions. A Summary of Test Results from Joint FAA/NASA Runway Friction Program; NASA Technical Paper; NASA: Washington, DC, USA, 1990.
- He, Y.; Lu, C.; Shen, J.; Yuan, C. Design and analysis of output feedback constraint control for antilock braking system based on Burckhardt’s model. Assem. Autom. 2019, 39, 497–513. [Google Scholar] [CrossRef]
- He, Y.; Lu, C.; Shen, J.; Yuan, C. A second-order slip model for constraint backstepping control of antilock braking system based on Burckhardt’s model. Int. J. Model Simul. 2019, 40, 130–142. [Google Scholar] [CrossRef]
- Qiu, Y.; Liang, X.; Dai, Z. Backstepping dynamic surface control for an anti-skid braking system. Control Eng. Pract. 2015, 42, 140–152. [Google Scholar] [CrossRef]
- Jiao, Z.; Sun, D.; Shang, Y.; Liu, X.; Wu, S. A high efficiency aircraft anti-skid brake control with runway identification. Aerosp. Sci. Technol. 2019, 91, 82–95. [Google Scholar] [CrossRef]
- Jiao, Z.; Liu, X.; Shang, Y.; Huang, C. An integrated self-energized brake system for aircrafts based on a switching valve control. Aerosp. Sci. Technol. 2017, 60, 20–30. [Google Scholar] [CrossRef]
- Lin, C.M.; Lin, M.H.; Chen, C.H.; Yeung, D.S. Robust PID control system design for chaotic systems using particle swarm optimization algorithm. In Proceedings of the 2009 International Conference on Machine Learning and Cybernetics, Baoding, China, 12–15 July 2009; pp. 3294–3299. [Google Scholar]
- Du, C.; Li, F.; Yang, C.; Shi, Y.; Liao, L.; Gui, W. Multi-Phase-Based Optimal Slip Ratio Tracking Control of Aircraft Antiskid Braking System via Second-Order Sliding Mode Approach. IEEE-ASME Trans. Mechatron. 2021; early access. [Google Scholar]
- Wang, L.X. Adaptive Fuzzy Systems and Control—Design and Stability Analysis; Prentice-Hall: Hoboken, NJ, USA, 1994. [Google Scholar]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Deng, W.; Yao, R.; Zhao, H.; Yang, X.; Li, G. A novel intelligent diagnosis method using optimal LS-SVM with improved PSO algorithm. Soft Comput. 2019, 23, 2445–2462. [Google Scholar] [CrossRef]
- Pacejka, H.B. Tire and Vehicle Dynamics, 3rd ed.; Elsevier: Oxford, UK, 2012. [Google Scholar]
- Savaresi, S.M.; Tanelli, M. Active Braking Control Systems Design for Vehicles; Springer: London, UK, 2010. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| y | Vertical displacement of the center of gravity of the fuselage |
| v | Aircraft speed |
| l | Distance from center of gravity to main wheel |
| l | Distance from center of gravity to front wheel |
| h | Height of center of gravity |
| n | Number of mainwheels |
| T | Residual thrust |
| M | Mass of aircraft |
| Airport air density | |
| C | Resistance coefficient |
| C | Lift coefficient |
| S | Aircraft windward area |
| Runway | ||||
|---|---|---|---|---|
| Dry asphalt | 1.2801 | 23.99 | 0.52 | 0.03 |
| Dry concrete | 1.1973 | 25.168 | 0.5373 | 0.03 |
| Wet asphalt | 0.857 | 33.822 | 0.347 | 0.03 |
| Snow | 0.1946 | 94.129 | 0.646 | 0.03 |
| Ice | 0.05 | 306.39 | 0 | 0.03 |
| Road Surface | Vertical Load | Initial Speed | Brake Pressure | Average Slip Rate | Total Braking Energy |
|---|---|---|---|---|---|
| Dry | 60 | 54 | 15.1 | 0.11 | 835 |
| Dry | 60 | 74 | 18.1 | 0.09 | 1342 |
| Dry | 65 | 70 | 13.2 | 0.12 | 1342 |
| Damp | 120 | 55 | 11 | 0.07 | 872 |
| Damp | 120 | 76 | 8.2 | 0.06 | 1037 |
| Damp | 120 | 102 | 7.9 | 0.05 | 1104 |
| Flooded | 59 | 53 | 5.6 | 0.11 | 289 |
| Flooded | 59 | 75 | 3.7 | 0.33 | 239 |
| Flooded | 78 | 53 | 6.2 | 0.12 | 533 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Liang, X.; Chen, M.; Liu, W. Robust Self-Learning PID Control of an Aircraft Anti-Skid Braking System. Mathematics 2022, 10, 1290. https://doi.org/10.3390/math10081290
Xu F, Liang X, Chen M, Liu W. Robust Self-Learning PID Control of an Aircraft Anti-Skid Braking System. Mathematics. 2022; 10(8):1290. https://doi.org/10.3390/math10081290
Chicago/Turabian StyleXu, Fengrui, Xuelin Liang, Mengqiao Chen, and Wensheng Liu. 2022. "Robust Self-Learning PID Control of an Aircraft Anti-Skid Braking System" Mathematics 10, no. 8: 1290. https://doi.org/10.3390/math10081290
APA StyleXu, F., Liang, X., Chen, M., & Liu, W. (2022). Robust Self-Learning PID Control of an Aircraft Anti-Skid Braking System. Mathematics, 10(8), 1290. https://doi.org/10.3390/math10081290