1. Introduction
Friction is an inherent property of mechanical systems. Reduction of undesirable friction should be considered for purposes of design and high-efficiency operation of mechanical systems. Diverse mechanisms have been proposed to improve mechanical system performance by properly integrating electromagnetic devices aiming to reduce waste and vibrations in rotating machinery components. In this context, electromagnetic bearing system is a technology that supports rotors without physical contact, which eases the vibration control in rotating machinery [
1]. Despite the advantages of electromagnetic levitation systems, such as low friction, low noise, no mechanical wear, no use of lubricants, stable rotor operation at high speeds and no power loss, their nonlinear dynamics and inherently unstable characteristics make the robust and efficient control design quite complicated [
2].
Several methodologies for active control of different electromagnetic systems used for efficiently levitating rotors have been presented in the literature. In [
3], an electromagnetic levitation prototype system is presented. A Proportional-Integral-Derivative (PID) controller is implemented to suspend a rotor at a specified position against the gravity force [
3]. The authors of [
4] propose a robust fast terminal sliding mode control method. The chattering problem from the discontinuous input is addressed by adopting the higher-order scheme while the adaptive scheme allows to compute the switching gain to relax the upper bound assumption of disturbance. A fractional order PID controller for rotor suspension by active magnetic bearing is presented in [
5]. In that study, the authors use optimization evolutionary algorithms for tuning the control parameters while performing radial and axial motion control. An intelligent positioning control approach based on a neural fuzzy controller for solving the unbalance vibration problem in an active magnetic bearing system is introduced in [
6]. Radial basis function neural networks are employed for adjusting the control parameters within the fuzzy logic controller. On the other hand, the authors of [
7] propose a novel robust strategy for levitation recovery control of an active magnetic bearing suspension system. The proposed strategy is developed on model-based
-synthesis to identify a delevitated condition provoked by an external fault or exogenous disturbance. Thus, efficient control of electromagnetic suspension systems for a wide range of operational conditions and applications represents a challenging research problem. Robust control design for magnetic levitation train systems constitutes another open well-known relevant research issue. Radial basis function neural networks have been successfully integrated in the adaptive robust control design stage for magnetic levitation vehicle systems under various disturbances as well [
8,
9]. Here, neural networks have been employed to identify external disturbances and time-varying mass. In addition, in [
10], neural networks were implemented for effective estimation of parameter matrix and system state in magnetic levitation vehicles. Unexpected external disturbances and parametric uncertainty could significantly deteriorate the control performance and make even the system unstable [
8]. Furthermore, vibrations could cause failures in the levitation system [
9]. Irregular external disturbances and internal parametric uncertainty can lead to undesirable nonlinear dynamical behaviors, even the instability of the suspension system [
10].
Moreover, adaptive control algorithms based on Artificial Intelligence (AI) are in continuous growth due to their relevance to the efficient regulation of complex nonlinear dynamic system operation under high precision requirements. Applications of electromagnetic actuators can be included in this class of dynamic systems. Furthermore, AI has been successfully employed in diverse science and engineering applications for improving the dynamic systems performance or predicting their behavior by processing measured and stored data in real time [
11]. This represents an invaluable feature when system model information is limited, and parametric uncertainty could be exhibited. Moreover, due to the flexibility of use, low computational demand and fast adaptability, AI-based control strategies are effectively applied to solve complex control problems in agriculture, the service industry, aviation and other fields beyond control engineering [
12,
13]. In this current research area, they seem important alternatives of the control theory [
12], which evolves continuously as new models describing the system dynamic performance. AI provides improvements for adaptation, organization, learning, decision taking, and coordination capabilities for an extensive variety of automatic control systems. Artificial Neural Networks (ANNs) are included in the data-driven learning control where their performance is based on experimentally collected data from input and outputs signals of the engineering system [
14,
15]. Nowadays, dynamic systems with the possibility to include sensors are frequently found. Thus, input/output information can be used to develop intelligent schemes adapting themselves to unknown perturbations and complex operation scenarios as in active suspension systems [
16]. Therefore, these features must be explored in a deeper way to overcome the main drawbacks of control methods based on detailed nonlinear dynamic models. The present paper deals with an adaptive control design perspective taking advantage of these features. In this way, the capability of efficacious compensation of external disturbances and uncertainty is incorporated.
Indeed, uncertainty constitutes a substantial source of trouble in realistic control applications of nonlinear dynamic systems, which could provoke instability or poor tracking performance [
17,
18]. Harmful disturbances and parametric uncertainty could have an adverse effect on the closed-loop nonlinear system stability. For these perturbed operational scenarios, the tracking performance of motion profiles planed on uncertain nonlinear dynamic systems could be significantly deteriorated. In this situation, sliding mode theory and artificial neural networks represent effective control design approaches [
17]. Sliding mode control offers several remarkable features with respect to other classical control design methods such as robustness against parametric variations, unmodelled external disturbances and uncertain nonlinearities [
17,
19]. Furthermore, differential neural networks for nonlinear adaptive state observation have been successfully combined with sliding mode control to regulate a class of uncertain dynamic systems [
17]. Differential neural networks stand for a particular class of artificial neural networks that can be used to approximate external disturbances and uncertainties in a nonlinear dynamic system structure [
18]. Differential neural networks (DNNs) have been also applied to design a nonparametric identifier for adaptive robust control [
18]. The application of a single-layer DNN to develop a nonparametric model of eye response was introduced in [
20]. Recurrent neural networks can be implemented to successfully estimate uncertain dynamics [
21]. Moreover, the presence of nonlinearities in practical dynamic systems represents a difficult issue for control synthesis and stability analysis [
22]. The problem of nonlinearities for control design and analysis in wind turbine systems through the Takagi–Sugeno fuzzy method has been properly addressed in [
22]. The Takagi–Sugeno fuzzy model represents another powerful means to approximate complex nonlinearities [
23]. An effective synchronization control design method of Takagi–Sugeno fuzzy neural networks has been described in [
23]. Takagi–Sugeno fuzzy neural networks can be utilized as an important and effective modelling approach to describe complex nonlinear dynamic systems as well [
23].
This article introduces a new neural robust control design approach for reference trajectory tracking for the rotor vertical position of an electromagnetic suspension system subjected to internal and external disturbances. In contrast to other electromagnetic levitation control design techniques based on theoretical nonlinear modelling, differential flatness, sliding mode control theory and B-spline artificial neural networks are synergically integrated for synthesis of the presented nonlinear control strategy for wide-range perturbed operating conditions. In this fashion, accurate estimation of nonlinear model uncertainties, external time-varying disturbances and system parameters are conveniently avoided. For the purposes of comparative analysis, as another important research work direction on high-efficiency control design for nonlinear dynamic systems, a trajectory tracking control technique based on theoretical modelling is described. The structural property of differential flatness is exploited as a powerful tool for efficient desirable motion reference tracking control design and stability analysis of the disturbed nonlinear dynamic system. The sliding mode discontinuous control action is approximated by a neural network-based adaptive continuous control function. Thus, the undesired chattering problem is conveniently evaded. B-spline artificial neural networks are used to tune on-line a single control design parameter to improve the robust performance of the electromagnetic suspension system. Since the structural property of differential flatness is capitalized, the developed control design perspective can be directly extended to many differentially flat engineering systems [
24]. In this regard, an important class of vibrating systems exhibits the property of differential flatness [
25]. Several electric motors are differentially flat [
26]. Controllable linear dynamic systems indeed present some flat output.
The main advantages and features of the presented adaptive electromagnetic levitation control scheme based on differential flatness, sliding modes and B-spline artificial neural networks are summarized as follows. Dependency on theoretical modelling of the uncertain nonlinear dynamic system is substantially reduced. The capability of suppression of internal and external disturbances is incorporated. Accurate tracking tasks of position reference profiles planned for the nonlinear electromagnetic suspension dynamic system under the influence of bounded disturbances can be fulfilled. Closed-loop electromagnetic levitation system stability can be guaranteed for bounded perturbed operational environments. Compared with other existing robust control techniques based on the active disturbance rejection design perspective, real-time estimation of exogenous perturbations, parametric uncertainty and uncertain nonlinearities are not requested. Thus, additional design of effective disturbance observers for uncertain nonlinear dynamic systems is not necessary. Furthermore, approximations of nonlinearities, parametric uncertainty, uncertain dynamics and unknown variable external disturbances to accomplish efficient and robust tracking control of desired motion reference profiles are not required. It is shown how the structural property of differential flatness, sliding modes and B-spline artificial neural networks can be properly combined to derive solutions to the accurate tracking control problem of prescribed motion reference trajectories. In this sense, insights to take advantage of differential flatness with other architectures of artificial neural networks and sliding mode control theory to improve the robustness of controllers regarding numerous types of irregular external and internal disturbances are depicted. The influence of various uncertain dynamic disturbances on realistic nonlinear physical systems certainly represents a pertinent complex issue in control engineering.
This manuscript is organized as follows. The controlled nonlinear electromagnetic suspension system theoretical model explored in this study is presented in
Section 2. For the purposes of comparative analysis, in
Section 3, an efficient trajectory tracking control technique based on the property of differential differential of the nonlinear mathematical model is described. Certain accurate information from the theoretically dynamic modelling and variable exogenous disturbances should be available to guarantee closed-loop disturbed system stability. Next, the design of a trajectory tracking controller taking advantage of the sliding mode theory and differential flatness is also described in
Section 3. The results of a sliding mode control approach based on B-spline neural networks for robust and efficient tracking of reference trajectories on the electromagnetic suspension system are introduced in
Section 4. Robustness and efficacy of the adaptive neural-network sliding-mode differential-flatness control strategy is satisfactorily examined for several perturbed environments. Computer simulation results confirm the effectiveness of the introduced levitation control strategy. The influence of several classes of variable disturbances is actively suppressed. Efficient tracking of planned smooth reference profiles is demonstrated. The obtained results reveal that differential flatness represents an excellent powerful tool for derivation of high-efficiency desirable motion reference trajectory tracking controllers by integrating B-spline artificial neural networks and sliding mode theory for a wide class of controllable nonlinear dynamic systems under numerous types of internal and external disturbances. The conclusions of the present contribution and future relevant research work development are finally provided in
Section 5.
2. Electromagnetically Controlled Rotating Mechanical System
Without loss of generality to other schemes with multiple controlled electromagnetic actuators in which the property of differential flatness is presented, the electromagnetic suspension system considered in the present study is depicted in
Figure 1. This nonlinear dynamic system is not stable in open loop. Effective and efficient control strategies should be then developed to guarantee disturbed nonlinear dynamic system stability. An electromagnetic force
is generated by a properly controlled electromagnet in order to efficiently regulate the rotor vertical position
y of a rotating mechanical system of mass
m. In the control circuit,
u denotes the voltage control input and
i stands for the electric current signal.
R represents the resistance, and
denotes the inductance function of the coil depending on the rotor vertical position as follows [
27]:
where
,
and
a are positive constants.
The electromagnetically controlled, nonlinear rotating mechanical system dynamics are approximately described in state space as [
28]
with state variables
,
and
.
From Equations (
2), equilibrium operating conditions for the controlled nonlinear dynamic system are described by
where the overbar notation
denotes system variable at equilibria.
A control strategy based on the structural property of differential flatness and sliding modes to regulate the rotating mechanical system (
2) at a specified vertical equilibrium position
is described in the next section. Moreover, robust transference of the rotor system from an operating condition to another desired equilibria through efficient and robust tracking of some smooth position reference trajectory
is also considered.
3. Sliding-Mode Differential-Flatness Control
The electromagnetic suspension system constitutes a differentially flat dynamic system. The flat output is given by the rotor vertical position
. The differential parametrization of the state and control variables in terms of the flat output
y and its time derivatives is given by [
24,
28]
The nonlinear flat output dynamics can be then described by
with
From the differential parametrization (
4), the input gain parameter
can be also computed as
In Equation (
5), uniformly bounded, possible time-varying perturbations
have been intentionally taken into account as well. In this sense, perturbations could be due to exogenous vibrations, parametric uncertainty, reasonable unmodelled dynamics and small electromagnetic force model errors.
It is assumed that perturbations are bounded for control design purposes as
where
stands for an unknown positive constant. Global solution existence of the controlled nonlinear dynamic system (
5) can be thus guaranteed (cf. [
29]).
For the purposes of efficient control design based on detailed nonlinear theoretical modelling, the dynamics of the tracking error of the reference profile
can be described from Equation (
5) by the state space representation
with tracking error state variables
,
and
. The gain input
in terms of the tracking error state variables is given by
The actual state variables of the electromagnetic suspension system (
2) can be expressed as a solution of Equations (
9) as follows:
The following differential flatness controller to exponentially asymptotically regulate the tracking error state towards zero can be then synthesized:
with design parameter
. In this way, the tracking error is governed by the exponentially asymptotically stable closed-loop dynamics.
Hence, this differential flatness control design approach represents an excellent choice for applications where an accurate and detailed nonlinear mathematical model is known. Information on dynamic disturbances should be available as well.
In contrast, in the present study, the structural property of differential flatness is combined with sliding modes and B-spline artificial neural networks to derive a very good alternative for robust tracking control for an electromagnetic suspension system.
In this sense, the following smooth sliding surface function for the closed-loop behavior of the nonlinear electromagnetic suspension dynamic system is then specified for the design of a robust control scheme:
The reference trajectory tracking error is here represented by
. The desired reference position trajectory is denoted by
. Additional tracking error integral compensation can be embedded into the sliding surface
to improve the active disturbance suppression control capability [
30,
31].
For selection of the control design parameters:
, the following asymptotically stable closed-loop tracking error dynamic model can be established:
with roots of its characteristic polynomial located in the open left half complex plane.
The first time derivative of
is thus given by
From Equations (
14) and (
16), the controlled nonlinear dynamics of
is therefore described by
The sliding mode controller for desired rotor vertical position reference trajectory tracking can be then synthesized:
where
with
,
.
Thus, the perturbed discontinuous closed-loop dynamics of the sliding surface function satisfies
Now, consider the Lyapunov function candidate
The first time derivative of
along the trajectories of the perturbed controlled nonlinear system (
5) is then given by
The sliding surface
can be hence reachable in finite time [
19]. In fact, by solving the differential equation
this finite time amount
can be computed as
Hence,
,
. Notice that the value of the design parameter
is also admitted as was described above.
Therefore, for this condition, the tracking of the reference trajectory
is then performed as follows
The trajectory tracking error is governed by the desired closed-loop stable system dynamics described by Equation (
15). An asymptotically exponentially stable tracking error dynamics can be established in this fashion. Nevertheless, the design parameter
should be suitably selected to compensate uncertain bounded disturbances (
8) as proved in Equation (
21). Thus, in the present study, this single control parameter is computed from an adaptive perspective by implementing B-spline artificial neural networks. This parameter is firstly tuned off-line by considering highly perturbed operational scenarios according to design specifications for the secure operation of the electromagnetic actuator. Training data could be also generated from the differential parametrization of the system variables in terms of the flat output and its time derivatives for substantially disturbed operational environments. Thanks to the differential flatness, the perturbed system variables can be expressed as a solution of a differentially flat transformed dynamic system in which uncertainty, time-varying disturbances and uncertain nonlinearities may be incorporated for training of neural networks. This control parameter is next updated on-line by properly processing the information of the tracking error depending on the particular situation of the nonlinear electromagnetic suspension system. In this way, the efficiency and effectiveness of performing tracking tasks of desirable motion reference profiles can be improved for disturbed multiple operating conditions. For more detailed information about the advantages and efficiency of B-spline artificial neural networks, the interested reader is referred to the book [
32]. The convergence properties of some gradient-based algorithms commonly utilized for training of some classes of artificial neural networks as used in this work can be examined in [
33,
34]. In this sense, the expected performance of the ANN depends on the correct delimitation of the training algorithm considering typical behavior of the system under analysis, starting with typical steady state conditions.
4. Neural Sliding-Mode Differential-Flatness Control
In this section, B-spline neural networks are integrated into the robust motion trajectory tracking control approach based on differential flatness and sliding modes. In this fashion, the tracking control performance can be significantly improved by implementing B-spline neural networks to adaptively tune a single control design parameter. Furthermore, the effectiveness of the presented neural sliding mode control strategy is confirmed by computer simulation results. The Runge–Kutta–Fehlberg method with a fixed time step of 0.1 ms for assessment of the control performance was implemented. The electromagnetic suspension system parameters used for numerical evaluations are indicated in
Table 1.
For evaluation purposes of control robustness, the term
in Equation (
18) was first considered as an unknown perturbation depending on the flat output. The control input gain
was also replaced by
. Additional small uncertainties in the nonlinear dynamic theoretical model were thus taken into account. The control law (
18) was then simplified as follows
with
To reduce high-gain effects in control implementation, the signum function was approximated by the continuous function
where
is an arbitrary small positive constant.
As a first case study, the controller design parameters were set as:
,
and
. The control gains
,
and
were chosen so that the differential Equation (
15) has the stable closed-loop characteristic polynomial
with
rad/s,
rad/s and
. Control gains were then computed as
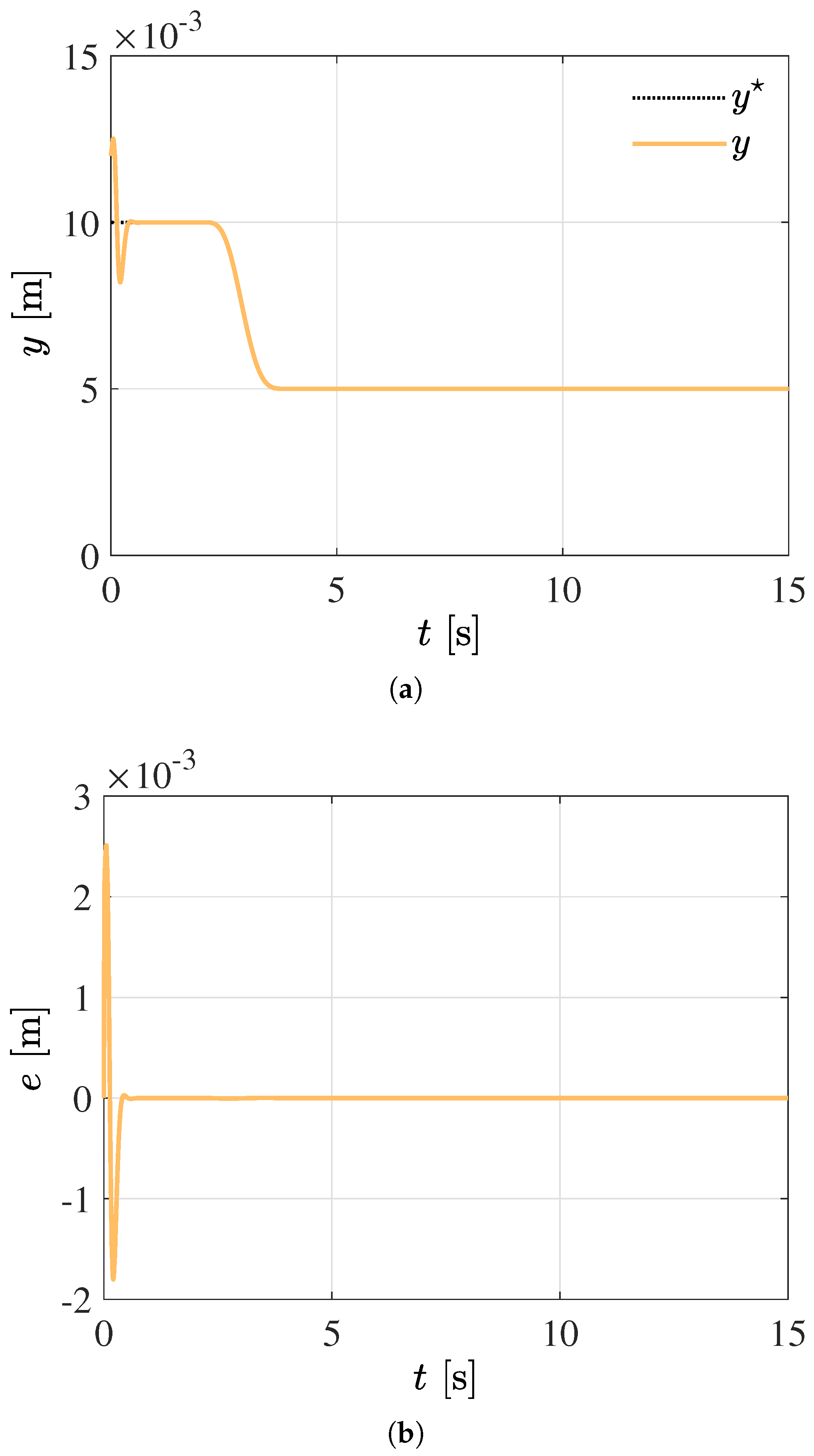
Figure 2 and
Figure 3 depict the robust performance of the tracking control scheme based on sliding modes and differential flatness. The flat output is first regulated at the desired initial position
m. As displayed in
Figure 2, an efficient transference of the output variable
y from the initial equilibrium position
m towards the final equilibrium position
m, following the reference trajectory
into the time interval
s, is then performed. The capability of the high-gain controller to effectively reject significant state-dependent disturbances is also corroborated in the tracking error response. The closed-loop responses of the control voltage and the electric current are displayed in
Figure 3.
Furthermore, instead of the position dependent-variable inductance
given by Equation (
1), the performance of the tracking control scheme is verified when it uses a constant approximate value for the inductance as:
.
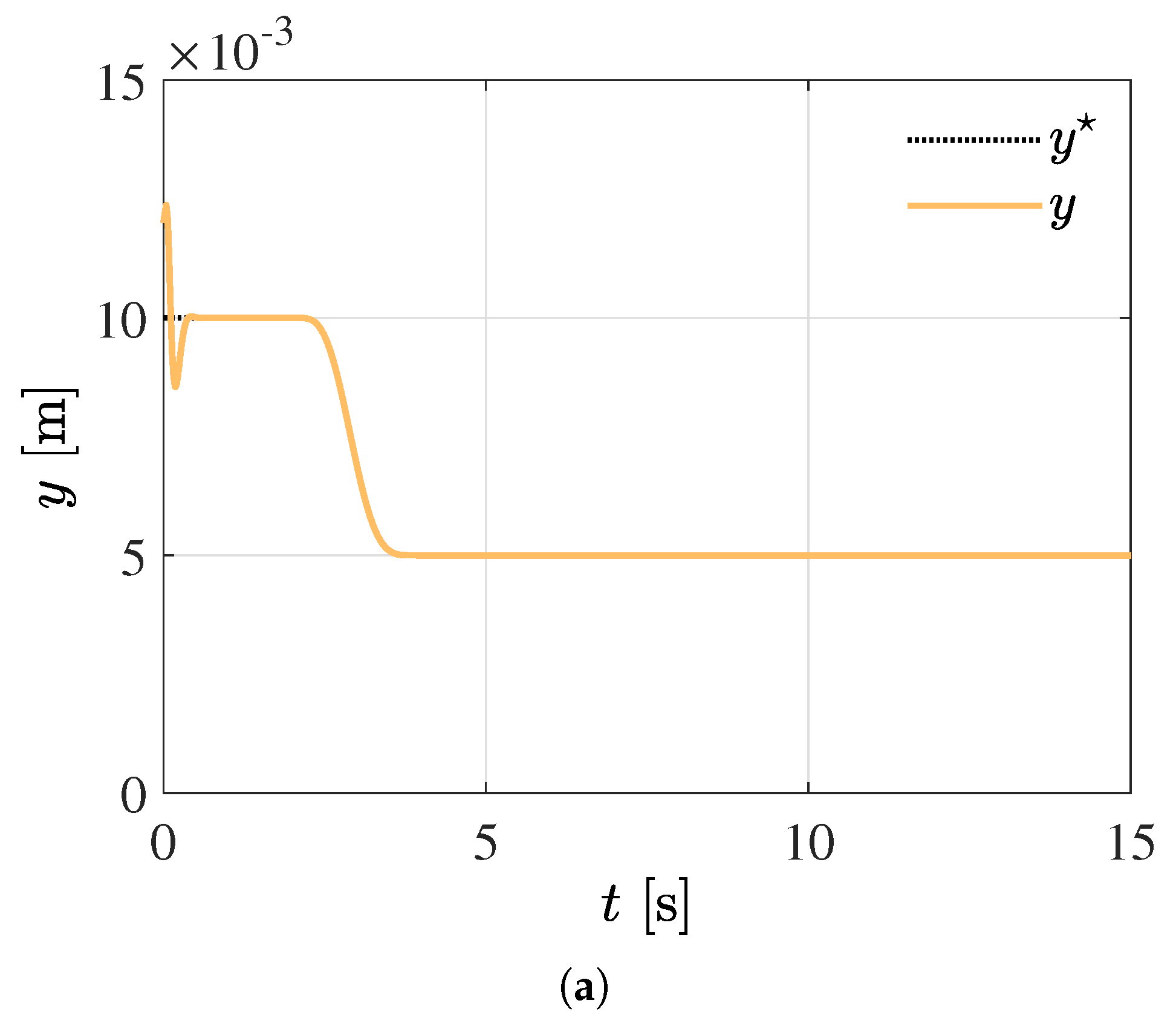
Figure 4 and
Figure 5 describe the satisfactory results obtained for this second situation. As displayed in
Figure 4, an acceptable reference position trajectory tracking can be similarly achieved. In
Figure 4, the acceptable tracking error response is verified as well. In
Figure 5, the electric current and voltage responses are depicted. Nevertheless, in this second case study, the control parameter
W should be incremented from 300 to 350 to suppress parametric uncertainty disturbances.
In this paper, from an adaptive-like control design approach, B-spline Artificial Neural Networks (BsNN) are integrated in the trajectory tracking controller based on sliding modes and differential flatness for the electromagnetic levitation system [
36,
37]. The inclusion of this adaptive strategy supports the robustness of the control law by the correct definition of a key parameter. The artificial neural network is precisely used for updating on-line the control parameter
W based on tracking error information as portrayed in
Figure 6. The structure of this class of neural networks consists of a hidden layer only. Here, activation functions permit to attain a nonlinear relationship of the output with respect to the input. Both input and output could be scalars or vectors. In this application, both input and output signals are scalars. This type of intelligent agent is effective for dealing with the system nonlinearities and uncertainties, since by using different learning rate indexes and inputs, the BsNN are capable to adjust iteratively in real time their synaptic weights by means of the constant learning process of the physical system [
38]. The output is generated from a weighted linear combination of its basis function outputs, as observed in
Figure 6.
In the developed control scheme, we are aiming with the use of BsNN to enhance the efficient dynamic performance when the system is subjected to possible unmodelled effects, uncertainties and disturbances. Thus, BsNN characteristics should exhibit robustness and low amount of math operations. Therefore, several univariate and multivariate basis functions of different orders were analyzed. Nevertheless, the observed results were similar in this application in which a single control design parameter is continuously tuned on-line. Thereby, the final selection was done for univariate basis function of third order as a compromise of the number of calculations and high performance under unknown scenarios considered in the design stage. If the order is higher and multivariate basis function is selected, the amount of math operations is increased but the dynamic performance is not enhanced considerably. In this work, the following output was adopted:
with
where
and
are the weights and basis function outputs vectors formed by the
j-
elements for
which is defined by the number of synaptic weights. In this study, we define the B-spline output as the control parameter
. The tracking error is used as the main element for the learning process. The BsNN scheme is focusing to observe drastic changes in the operating condition; thus, it can update the control algorithm performance but with the compromise of low computational demand. Therefore, this behavior is attained by using the following instantaneous learning rule; the neuron is continuously trained:
where
and
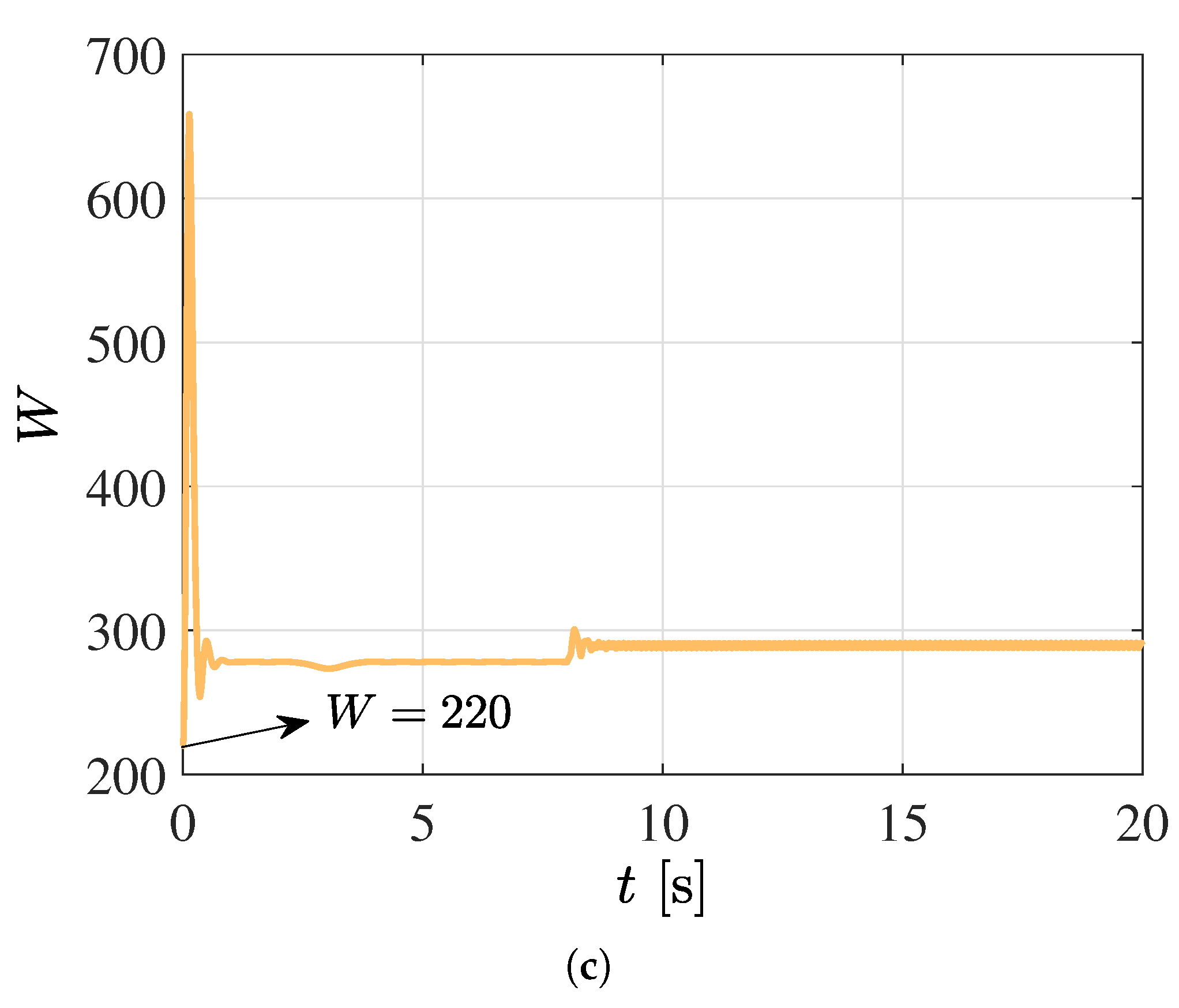
denote the instantaneous output tracking error and the learning rate index, respectively. It is important to know that in all cases the search space is bounded considering the typical steady state condition of the system to be controlled. In this sense, the parameters and variables are a boundary in accordance with physical system restrictions. Furthermore, the learning rule could be restricted for operating only when the magnitude of the error input is higher than some predefined satisfactory value in terms of steady state error. Thus, the initial values are in accordance with the magnitudes of system variables in steady state condition. In this context, a third experiment was carried out. The comparison of adaptive and regular responses is presented. A low gain value was firstly set as:
, which is the initial value for the adaptive case as well. Since rotary machinery could exhibit serious vibration issues [
39], external undesired, unknown oscillating disturbances disrupting the position dynamics were considered as follows
with
and,
The computation simulation results for this disturbed operational scenario are portrayed in
Figure 7 and
Figure 8. Vibrating disturbances were solely considered. The closed-loop nonlinear dynamic system stability is verified. The position reference trajectory tracking response using a fixed
W control parameter value is shown in
Figure 7. In
Figure 8, the superior performance of the closed-loop system is evident by implementing the introduced adaptive tuning technique for
. Vibrations disrupting the flat output dynamics are substantially attenuated. Furthermore, as indicated in the figures, the Integral of Time-Weighted Absolute Error Index (ITAE) was used as a quantitative parameter for performance comparison purposes. This performance indicator is given by
where
and
is the integration time step used in simulation. Notice that the system performance can be improved considerably by using B-spline artificial neural networks as proposed in the present work. Even when the information of the bounded disturbances is not available, the control algorithm is able to adjust its performance on-line based on the error information only. The exhibited results portray an appropriate performance of the electromagnetic system by using the proposed motion control scheme. The accurate smooth reference profile tracking planned for the position dynamics is achieved despite being subject to external disturbances.
Two additional computer simulation experiments in order to verify the BsNN adaptation capability of the new introduced tracking control scheme to compensate internal and external disturbances were finally carried out. Reasonable uncertainty in the control input gain was considered. Variations around
in the actual control input gain value given by Equation (25) were implemented. The inductance was also approximated as
. In this way, approximate information on a single input gain parameter from the nonlinear electromagnetic suspension system model was only used in control implementations. The obtained acceptable results are summarized in
Figure 9,
Figure 10,
Figure 11 and
Figure 12. Despite the fact the full system model information is not provided to the neural control scheme, the efficient trajectory tracking as well as acceptable attenuation levels of completely unknown oscillating disturbances disrupting the position dynamics are attained. A certain reduction of dependency on system information is then corroborated while acceptable closed-loop system performance is achieved.
On the other hand, in
Figure 13 and
Figure 14 can be appreciated a deficient performance of the closed-loop system when using fixed value of the control parameter as
. In fact, when considering a variation of the control gain as
and a fixed value of
, the system response is unstable. Moreover, as indicated in the figures, for the purposes of highlighting the improved system performance using the neural neural network tracking control, the initial value of the
W parameter matches the fixed cases, where for both case studies, it can be seen the system is able to recovering from an initial faulty operational condition when the
W control parameter is on-line computing by the B-spline neural network-based adaptive framework.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}