
Bio-Inspired Multi-UAV Path Planning Heuristics: A Review

Abstract
:1. Introduction
- What are the different bio-inspired approaches used in multi-UAV path planning?
- What are the most commonly considered factors in bio-inspired approaches for multi-UAV path planning?
- What are the most frequently used techniques for implementing coordination schemes, planning modes, and navigation scope in bio-inspired multi-UAV path planning?
- What are the limitations and challenges of developing and implementing bio-inspired multi-UAV path planning algorithms?
- What key research directions need to be addressed to overcome these limitations and challenges?
2. Background
2.1. The Multi-UAV Path Planning Problem
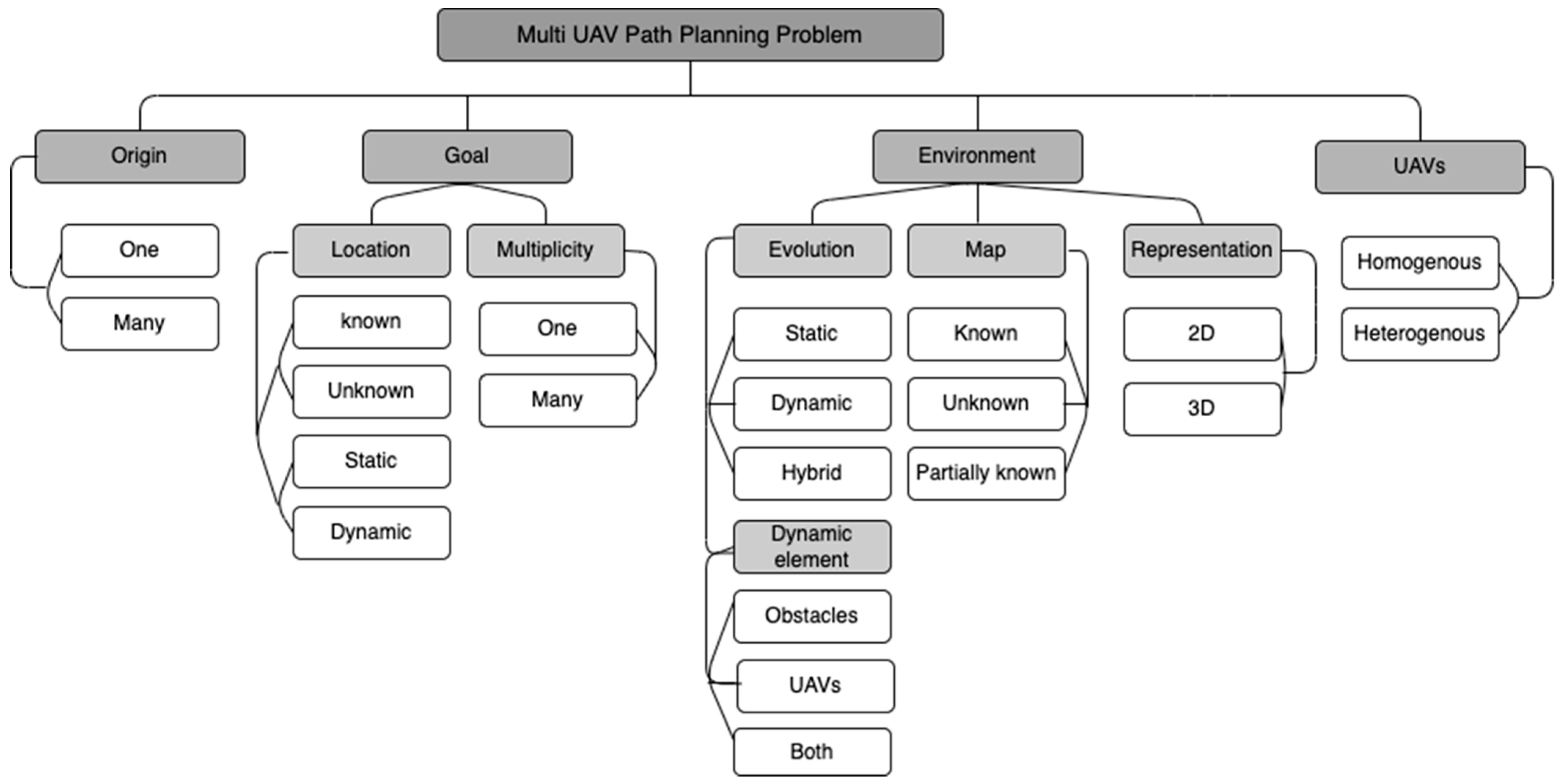
- Origin/starting point/source: It is also known as the depot in the traveling salesman problem (TSP) [34,35]. It represents the current location of the UAV or the initial location from where the UAV should start traveling. A path planning problem for a single UAV system usually requires one starting location, however, for a multi-UAV system, there might be a shared starting location or several starting locations.
- Goal/end point/destination/target: It represents the final location where the UAV should stop. There can be one or more goals. Goals can be known or unknown in advance. They can be static, i.e., stationary throughout the mission, or dynamic. i.e., change their locations over time [4]. The schemes of goals can be one following:
- One shared goal for all UAVs: There is one goal, and all UAVs will have to visit this goal.
- Multiple goals, one for each UAV(One-for-each): Each UAV is allowed to visit exactly one goal.
- Multiple goals for each UAV (Multi-for each): There are multiple sets of goals, and each set can be visited by precisely one UAV. In this case, the sets are assigned at an initial phase for each UAV [24]. or each UAV searches for its goals set [36,37]. Alternatively, sets of goals can be overlapping, as shown in Figure 2.
- UAVs: A multi-UAV system can be composed of homogenous vehicles, i.e., with identical features and capabilities, or heterogeneous vehicles, i.e., with different capabilities [38]. A key feature, especially for a multi-UAV system, is collision avoidance (CA). CA is an important capability when there are obstacles or multiple UAVs in the environment. However, CA adds a layer of complexity and challenges, hence, sometimes it is ignored based on certain assumptions [39]. In 3D environments, in particular, CA is an issue that should be explicitly handled either by an altitude layering approach which means that each UAV flies at a different altitude [40,41], or through a safe distance approach where the distance between any two UAVs should not exceed a safe distance [10].
- Environment (Env.): It is the workspace in which a UAV navigates which can be embodied in two-dimensional (2D) or three-dimensional (3D) planes. A map representation is usually developed for the environment which can be known, unknown, or partially known [10,42]. A known map accurately represents the environment and encapsulates all of its details, such as the surrounding area and obstacles, while a map with approximate or uncertain information is considered partially known. On the other hand, in an unknown environment, where a UAV can only acquire further knowledge about the surroundings during navigation, the map is considered unknown [43]. Another primary characteristic of the environment affecting path planning problems is its evolution which can be static or dynamic [4]. A static environment comprises unchanging settings while a dynamic environment includes moving objects, usually obstacles or other UAVs [44], which change the environment geometry [45]. Dynamicity of the environment can be handled by either replanning the initial path or calculating the probability of the target position in different cells or time frames. However, replanning the initial path can encounter limitations when certain thresholds have been exceeded, such as in [46,47].
2.2. Multi-UAV Path Planning Algorithms
- Mode: The path planning mode can be offline or online. An offline planner constructs the path before motion begins. In contrast, an online planner incrementally constructs the plan while the UAV is in motion [48,49]. Typically, it is recommended to combine the two approaches to maximize their strengths [17].
- Coordination: The coordination process in a multi-UAV system describes the control structure and communications scheme between the vehicles.
- Control can occur in a centralized or decentralized manner [50,51]. In centralized planning approaches, a single control agent acts as a leader to ensure coordination among the entire team of UAVs [18,51]. This central agent (e.g., a control station) usually has global knowledge about network status and each robot’s interactions [18,50]. Decentralized architectures can be further divided into distributed architectures and hierarchical architectures. In hierarchical coordination, multiple-leader robots operate as central nodes for smaller groups of robots. Then, each leader coordinates with other leaders’ space [50,52].
- On the other hand, distributed approaches lack a central agent; instead, the individual agents plan and adjust their paths. The decisions are distributed on the robot team’s side, not determined by a base station [18,51,52,53]. Hence, distributed systems are more robust and fault-tolerant than centralized approaches [18]. Specific applications follow a hybrid approach to leverage the advantages of both centralized and distributed methods [53].
- It is worth noting that the terms decentralized and distributed are used interchangeably in the literature (e.g., the study [53]), although referring to distinct elements of the decision-making policy of the system: authority and responsibility. As a result, we can have a decentralized system in which the responsibility is not distributed equally but in a hierarchal scheme, as illustrated before.
- Communications allow sharing of information between robots to enhance their perception of the environment and inform the decision-making required for motion planning [4]. Communications can be categorized based on how the robots exchange information to direct/explicit and indirect/implicit communications. In explicit communications, robots share information directly, which might take the form of unicast or broadcast messages, while in implicit communications a robot learns about other robots in the system by observing its environment [50].
- Scope: Based on the information scale considered while generating the path, planners can be classified as global, local, or hybrid/mixed [19,48]. If information about the entire environment is used to plan the path, the planners are considered global. Global planners are known for their efficiency when the environment map is perfectly known and the environment is static, therefore, they are also known as static planners. In contrast, local path planners only consider the area surrounding the vehicle, they are essential when no environment map is available or when the environment is dynamic, thus they are known as dynamic or reactive planners [3,4,8,9,42]. In hybrid path planning, both types are used together; a local planner takes the path from a global planner and then dynamically adjusts it according to obstacles in the environment [54].
- Objective function: An optimization criterion that is defined by the objective function is required for finding a path. An objective function can be a multi-objective, single-objective, or single-objective with weights (where multi-objective weights are balanced and transformed to single-objective weights) function that should be maximized or maximized [55]. There are many standard optimization objectives in cooperative path planning, and the common ones: are cost minimization, payoff optimization, performance optimization, and risk minimization, such as threats or flight altitude. The objective function may have different formulations in different scenarios [10].
3. Review Methodology
| Listing 1. Query used to retrieve literature studies. |
| (((ALL = (Multi* AND UAV AND path AND planning)) AND LANGUAGE: (English)) OR |
| ((ALL = (Multi* AND UAV AND path AND finding)) AND LANGUAGE: (English)) OR |
| ((ALL = (Multi* AND drone AND path AND finding)) AND LANGUAGE: (English)) OR |
| ((ALL = (Multi* AND drone AND path AND planning)) AND LANGUAGE: (English))) |
- The article was published between 2013 and 2021.
- Conference papers, posters, or demos as these publications do not provide adequate information about contributions due to a lack of supplied content to evaluate.
- Articles with an unavailable full text through WoS.
- Survey papers.
- Articles that do not consider UAVs as an agent in the system.
- The proposed algorithm is not a bio-inspired algorithm or any algorithm that is hybridized with a bio-inspired algorithm.
- The article did not include path planning as the main topic or one of the achieved contributions.
- Articles focusing on UAV hardware—The paper’s contribution is limited to UAV manufacturing, i.e., the design of hardware, mechanical, and electronic components of UAVs.
- Articles focusing on single-UAV path planning. The paper contributes only to single-path planning systems.
- Articles focusing on navigation functions other than path planning, such as mapping or localization techniques.
- Articles focusing only on developing a simulation tool or a framework for UAVs.
4. Bio-Inspired Multi-UAV Path Planning Algorithms
4.1. PSO and Its Variants
4.1.1. Original PSO
4.1.2. Enhanced PSO
4.1.3. Hybrid PSO
4.2. GA and Its Variants

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Approach Type | Problem | Algorithm | Objective Function Type | Evaluation | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Origin | Goal | UAVs | Environment | ||||||||||||||
| One/Multiple | One/Multiple | (S/D) | Known | Team | CA | Representation | Map | Obstacles | Communication | Control | Scope | Planning | Approach | ||||
| S/D | K | ||||||||||||||||
| PSO | |||||||||||||||||
| [37] | En | M | M/E | D | P | HO | - | 2D | PK | - | - | - | - | L | On | S-WS | Sim |
| [69] | En | M | 1 | S | UK | HT | U + O | 3D | PK | S | K | E | D | Hd | Hd | S-WS | Sim |
| [66] | En | M | 1 | S | K | HO | U + O | 4D | K | S | K | - | - | G | Off | M | Sim |
| [64] | Ori | M | M/E | S | K | HO | U + O | 3D | K | S | K | E | C | G | Off | M | Sim |
| [70] | En | 1 | 1 | S | K | HO | U + O | 3D | K | S | K | - | - | G | Off | M | Sim |
| [46] | Hd | M | M/E | D | UK | HO | - | 2D | PK | - | - | E | C | Hd | Hd | S-WS | Sim |
| [65] | Hd | M | 1/E | S | K | HO | U + O | 3D | K | S | K | - | - | G | Off | SGL | Sim |
| [73] | Hd | 1 | M/E | S | K | HO | U + O | 3D | K | S | K | E | Dist | G | Off | M | Sim |
| [75] | Hd | M | M/E/O | S | K | HO | O | 3D | PK | S/D | K + UK | - | - | Hd | Hd | SGL | Sim |
| GA | |||||||||||||||||
| [36] | En | M | 1/E | S | K | HO | U + O | 3D | K | S | K | - | - | G | Off | M | Sim |
| [80] | En | M | M/E | S | K | HO | U + O | 3D | K | S | K | E | C | G | Off | S-WS | Sim |
| [81] | Ori | 1 | M/E | S | UL | HT | U | 3D | PK | - | - | - | - | Hd | Hd | M | Sim |
| [82] | En | M | M/E/O | S | K | HT | U | 3D | PK | - | - | E | Dist | G | Off | S-WS | Sim + R |
| [83] | Hd | M | M/E | S | K | HO | U + O | 3D | K | S | K | - | - | G | Off | SGL | R |
| [84] | Ori | M | M/E | S | K | HO | U | 2D | K | - | - | - | - | G | Off | M | Sim |
| [78] | Hd | M | M/E | S | K | HO | - | 2D | K | - | - | - | - | G | Off | SGL | Sim |
| GWO | |||||||||||||||||
| [85] | Ori | M | 1 | S | K | HO | O | 2D | PK | D | K + UK | - | - | L | On | M | Sim |
| [86] | Ori | M | 1/E | S | K | HO | U + O | 3D | K | S | K | - | - | G | Off | SGL | Sim |
| [87] | En | M | 1 | S | K | HO | U + O | 3D | K | S | K | E | Dist | G | Off | S-WS | Sim |
| [88] | Hd | M | 1/E | S | K | HO | U + O | 3D | k | S | K | - | - | G | Off | S-WS | Sim |
| ACO | |||||||||||||||||
| [89] | En | M | M/E | S/D | P | HO | - | 2D | - | - | - | I | - | G | Off | SGL | Sim |
| [90] | En | M | M/E | S | UK | HT | U + O | 3D | PK | D | UK | E | Dist | Hd | Hd | M | Sim |
| [24] | Hd | M | M/E | S | UK | HT | - | 3D | PK | N | N | E | C | Hd | Hd | SGL | Sim |
| PIO | |||||||||||||||||
| [6] | En | M | 1/E | S | K | HO | U + O | 3D | K | S | K | E | Dist | G | Off | SGL | Sim |
| [47] | En | M | M/E | D | P | HO | U + O | 2D | PK | S | K | E | Dist | L | On | M | Sim |
| FOA | |||||||||||||||||
| [91] | En | 1 | M | S | UK | HO | O | 3D | PK | S | S | - | - | - | Hd | Hd | S-WS |
| LSO | |||||||||||||||||
| [92] | Ori | M | 1/E | S | K | HT | O | 3D | K | S | K | E | C | G | Off | S-WS | Sim |
| Evolutionary | |||||||||||||||||
| [93] | Hd | - | 1 | D | P | HO | U | 3D | PK | - | - | - | - | Hd | Hd | S-WS | Sim |
4.2.1. Original GA
4.2.2. Enhanced GA
4.2.3. Hybrid GA
4.2.4. Other Evolutionary Algorithms
4.3. GWO and Its Variants
4.3.1. Original GWO
4.3.2. Enhanced GWO
4.3.3. Hybrid GWO
4.4. ACO and Its Variants
4.4.1. Original ACO
4.4.2. Enhanced ACO
4.4.3. Hybrid ACO
4.5. PIO and Its Variants
4.5.1. Original PIO
4.5.2. Enhanced PIO
4.6. FOA and Its Variants
4.6.1. Original FOA
4.6.2. Enhanced FOA
4.7. LSO and Its Variants
5. Discussion
6. Conclusions
- Developing new bio-inspired algorithms that can tackle the specific challenges associated with the multi-UAV path planning problem, such as collision avoidance and high dynamicity of the environment.
- Investigating the use of local path planning to manage collisions without global knowledge about the environment.
- Investigating the use of hybrid path planning to handle partially known environments more efficiently.
- Developing reference maps and mission settings at different complexities that can be used to benchmark new proposals.
- Developing benchmark maps that are specifically designed for UAVs operating in 3D environments.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kurdi, H.; AlDaood, M.F.; Al-Megren, S.; Aloboud, E.; Aldawood, A.S.; Youcef-Toumi, K. Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour. Appl. Soft Comput. 2019, 83, 105643. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Kurdi, H.A.; Aloboud, E.; Alalwan, M.; Alhassan, S.; Alotaibi, E.; Bautista, G.; How, J.P. Autonomous task allocation for multi-UAV systems based on the locust elastic behavior. Appl. Soft Comput. 2018, 71, 110–126. [Google Scholar] [CrossRef]
- Khan, A.; Rinner, B.; Cavallaro, A. Cooperative robots to observe moving targets: A review. IEEE Trans. Cybern. 2016, 12, 187–198. [Google Scholar] [CrossRef] [PubMed]
- Parker, L.E. Path Planning and Motion Coordination in Multiple Mobile Robot Teams. Encycl. Complex. Syst. Sci. 2009, 24, 5783–5800. [Google Scholar]
- Zhang, D.; Duan, H. Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning. Neurocomputing 2018, 313, 229–246. [Google Scholar] [CrossRef]
- Basiri, A.; Mariani, V.; Silano, G.; Aatif, M.; Iannelli, L.; Glielmo, L. A survey on the application of path-planning algorithms for multi-rotor UAVs in precision agriculture. J. Navig. 2022, 75, 364–383. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Patle, B.K.; Babu, L.G.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Zhang, H.; Xin, B.; Dou, L.; Chen, J.; Hirota, K. A review of cooperative path planning of an unmanned aerial vehicle group. Front. Inf. Technol. Electron. Eng. 2020, 21, 1671–1694. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl. Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Israr, A.; Ali, Z.A.; Alkhammash, E.H.; Jussila, J.J. Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones 2022, 6, 126. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV Path Planning Using Optimization Approaches: A Survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Del Ser, J.; Osaba, E.; Molina, D.; Yang, X.-S.; Salcedo-Sanz, S.; Camacho, D.; Das, S.; Suganthan, P.N.; Coello Coello, C.A.; Herrera, F. Bio-inspired computation: Where we stand and what’s next. Swarm Evol. Comput. 2019, 48, 220–250. [Google Scholar] [CrossRef]
- Gonzalez, R.; Kloetzer, M.; Mahulea, C. Comparative study of trajectories resulted from cell decomposition path planning approaches. In Proceedings of the 21st International Conference on System Theory, Sinaia, Romania, 19–21 October 2017. [Google Scholar]
- Orozco-Rosas, U.; Montiel, O.; Sepúlveda, R. Parallel Bacterial Potential Field Algorithm for Path Planning in Mobile Robots: A GPU Implementation. In Fuzzy Logic Augmentation of Neural and Optimization Algorithms: Theoretical Aspects and Real Applications; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Koubaa, A.; Bennaceur, H.; Chaari, I.; Trigui, S.; Ammar, A.; Sriti, M.-F.; Alajlan, M.; Cheikhrouhou, O.; Javed, Y. Robot Path Planning and Cooperation; Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2018; Volume 772, ISBN 978-3-319-77040-6. [Google Scholar]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning. Procedia Comput. Sci. 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Raja, P. Optimal path planning of mobile robots: A review. Int. J. Phys. Sci. 2012, 7, 1314–1320. [Google Scholar] [CrossRef]
- Zhang, H.; Lin, W.; Chen, A. Path Planning for the Mobile Robot: A Review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef]
- Tang, B.; Xiang, K.; Pang, M.; Zhanxia, Z. Multi-robot path planning using an improved self-adaptive particle swarm optimization. Int. J. Adv. Robot. Syst. 2020, 17, 172988142093615. [Google Scholar] [CrossRef]
- Turpin, M.; Mohta, K.; Michael, N.; Kumar, V. Goal Assignment and Trajectory Planning for Large Teams of Aerial Robots. In Proceedings of the Robotics: Science and Systems IX, Berlin, Germany, 24–28 June 2013. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, Y.; Shi, X. A Hierarchical decision-making method with a fuzzy ant colony algorithm for mission planning of multiple uAVs. Information 2020, 11, 226. [Google Scholar] [CrossRef]
- Fan, Y.; Deng, F.; Shi, X. Multi-robot Task Allocation and Path Planning System Design. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 4759–4764. [Google Scholar]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV Systems: A Survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Oh, H.; Shin, H.-S.; Kim, S.; Tsourdos, A.; White, B.A. Cooperative Mission and Path Planning for a Team of UAVs. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1509–1545. ISBN 978-90-481-9706-4. [Google Scholar]
- Khoufi, I.; Laouiti, A.; Adjih, C. A Survey of Recent Extended Variants of the Traveling Salesman and Vehicle Routing Problems for Unmanned Aerial Vehicles. Drones 2019, 3, 66. [Google Scholar] [CrossRef]
- Gonzalez-Bermejo, S.; Alonso-Linaje, G.; Atchade-Adelomou, P. GPS: A New TSP Formulation for Its Generalizations Type QUBO. Mathematics 2022, 10, 416. [Google Scholar] [CrossRef]
- Dantzig, G.B.; Ramser, J.H. The Truck Dispatching Problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Lai, K.K.; Ram, B. Vehicle and UAV Collaborative Delivery Path Optimization Model. Mathematics 2022, 10, 3744. [Google Scholar] [CrossRef]
- Raivi, A.M.; Huda, S.M.A.; Alam, M.M.; Moh, S. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef]
- Corberán, Á.; Eglese, R.; Hasle, G.; Plana, I.; Sanchis, J.M. Arc Routing Problems: A Review of the Past, Present, and Future; Wiley Online Library: Hoboken, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Hong, Y.; Jung, S.; Kim, S.; Cha, J. Autonomous mission of multi-UAV for optimal area coverage. Sensors 2021, 21, 2482. [Google Scholar] [CrossRef]
- Ergezer, H.; Leblebicioğlu, K. 3D Path Planning for Multiple UAVs for Maximum Information Collection. J. Intell. Robot. Syst. 2014, 73, 737–762. [Google Scholar] [CrossRef]
- Hu, X.; Liu, Y.; Wang, G. Optimal search for moving targets with sensing capabilities using multiple UAVs. J. Syst. Eng. Electron. 2017, 28, 526–535. [Google Scholar] [CrossRef]
- Sultan, L.; Anjum, M.; Rehman, M.; Murawwat, S.; Kosar, H. Communication among Heterogeneous Unmanned Aerial Vehicles (UAVs): Classification, Trends, and Analysis. IEEE Access 2021, 9, 118815–118836. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Wu, F.; Varadharajan, V.S.; Beltrame, G. Collision-aware Task Assignment for Multi-Robot Systems. arXiv 2019, arXiv:1904.04374. [Google Scholar]
- Yan, F.; Zhu, X.; Zhou, Z.; Chu, J. A Hierarchical Mission Planning Method for Simultaneous Arrival of Multi-UAV Coalition. Appl. Sci. 2019, 9, 1986. [Google Scholar] [CrossRef]
- Melo, A.G.; Pinto, M.F.; Marcato, A.L.M.; Honório, L.M.; Coelho, F.O. Dynamic Optimization and Heuristics Based Online Coverage Path Planning in 3D Environment for UAVs. Sensors 2021, 21, 1108. [Google Scholar] [CrossRef] [PubMed]
- Zear, A.; Ranga, V. Path Planning of Unmanned aerial Vehicles: Current state and future challenges. In First International Conference on Sustainable Technologies for Computational Intelligence; Luhach, A.K., Kosa, J.A., Poonia, R.C., Gao, X.-Z., Singh, D., Eds.; Advances in Intelligent Systems and Computing; Springer: Singapore, 2020; Volume 1045, pp. 409–419. ISBN 9789811500282. [Google Scholar]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Mohanan, M.G.; Salgoankar, A. A survey of robotic motion planning in dynamic environments. Robot. Auton. Syst. 2018, 100, 171–185. [Google Scholar] [CrossRef]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic path planning of multi-UAVs for air pollution detection of ships in ports. Transp. Res. Part E-Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Duan, H.; Zhao, J.; Deng, Y.; Shi, Y.; Ding, X. Dynamic Discrete Pigeon-Inspired Optimization for Multi-UAV Cooperative Search-Attack Mission Planning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 706–720. [Google Scholar] [CrossRef]
- Ghandi, S.; Masehian, E. Review and taxonomies of assembly and disassembly path planning problems and approaches. Comput.-Aided Des. 2015, 67–68, 58–86. [Google Scholar] [CrossRef]
- Carbone, G.; Gomez-Bravo, F. Motion and Operation Planning of Robotic Systems; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A Survey and Analysis of Multi-Robot Coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Sarno, S.; D’Errico, M.; Guo, J.; Gill, E. Path planning and guidance algorithms for SAR formation reconfiguration: Comparison between centralized and decentralized approaches. Acta Astronaut. 2020, 167, 404–417. [Google Scholar] [CrossRef]
- Kahng, A.B.; Meng, F. Cooperative Mobile Robotics: Antecedents and Directions. Auton. Robots 1997, 4, 7–27. [Google Scholar]
- Hilmi Ismail, Z.; Sariff, N. A Survey and Analysis of Cooperative Multi-Agent Robot Systems: Challenges and Directions. In Applications of Mobile Robots; Gorrostieta Hurtado, E., Ed.; IntechOpen: London, UK, 2019; ISBN 978-1-78985-755-9. [Google Scholar]
- Garrido, S.; Moreno, L.; Gómez, J.V. Motion Planning Using Fast Marching Squared Method. In Motion and Operation Planning of Robotic Systems; Carbone, G., Gomez-Bravo, F., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 29, pp. 223–248. ISBN 978-3-319-14704-8. [Google Scholar]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]
- Trusted Publisher-Independent Citation Database—Web of Science Group. Available online: https://clarivate.com/webofsciencegroup/solutions/web-of-science/ (accessed on 8 October 2022).
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. J. Clin. Epidemiol. 2021, 134, 178–189. [Google Scholar] [CrossRef] [PubMed]
- Eberhart, R.C. Particle Swarm Optimization. 1995, 59. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=569491ee9dfe5e0752d4890421d611c296fcaf91 (accessed on 7 May 2023).
- Molina, D.; Poyatos, J.; Del Ser, J.; García, S.; Hussain, A.; Herrera, F. Comprehensive Taxonomies of Nature- and Bio-inspired Optimization: Inspiration versus Algorithmic Behavior, Critical Analysis and Recommendations. Cogn. Comput. 2020, 12, 897–939. Available online: http://arxiv.org/abs/2002.08136 (accessed on 10 December 2020). [CrossRef]
- Das, P.K.; Behera, H.S.; Panigrahi, B.K. A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning. Swarm Evol. Comput. 2016, 28, 14–28. [Google Scholar] [CrossRef]
- Asma, A.; Sadok, B. Dynamic Distributed PSO joints elites in Multiple Robot Path Planning Systems: Theoretical and practical review of new ideas. Procedia Comput. Sci. 2017, 112, 1082–1091. [Google Scholar] [CrossRef]
- Zheng, Q.; Feng, B.-W.; Liu, Z.-Y.; Chang, H.-C. Application of Improved Particle Swarm Optimisation Algorithm in Hull form Optimisation. J. Mar. Sci. Eng. 2021, 9, 955. [Google Scholar] [CrossRef]
- Hoffmann, M.; Muhlenthaler, M.; Helwig, S.; Wanka, R. Discrete Particle Swarm Optimization for TSP: Theoretical Results and Experimental Evaluations. In Adaptive and Intelligent Systems; Springer: Berlin/Heidelberg, Germany, 2011; pp. 416–427. [Google Scholar]
- Teng, H.; Ahmad, I.; Alamgir, M.S.M.; Chang, K. 3D Optimal Surveillance Trajectory Planning for Multiple UAVs by Using Particle Swarm Optimization With Surveillance Area Priority. IEEE Access 2020, 8, 86316–86327. [Google Scholar] [CrossRef]
- Shao, S.; He, C.; Zhao, Y.; Wu, X. Efficient Trajectory Planning for UAVs Using Hierarchical Optimization. IEEE Access 2021, 9, 60668–60681. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, X.; Zhang, Y.; Guan, X. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach. Chin. J. Aeronaut. 2019, 32, 1504–1519. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial intelligence: A modern approach; Prentice Hall series in artificial intelligence; Prentice Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Yang, Z.; Fang, Z.; Li, P. Bio-inspired collision-free 4D trajectory generation for UAVs using tau strategy. J. Bionic Eng. 2016, 13, 84–97. [Google Scholar] [CrossRef]
- Yan, F.; Zhu, X.; Zhou, Z.; Tang, Y. Heterogeneous multi-unmanned aerial vehicle task planning: Simultaneous attacks on targets using the Pythagorean hodograph curve. Proc. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2019, 233, 4735–4749. [Google Scholar] [CrossRef]
- Zhen, X.; Enze, Z.; Qingwei, C. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization. J. Syst. Eng. Electron. 2020, 31, 130–141. [Google Scholar] [CrossRef]
- Coello, C.; Lechuga, M. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Ahmed, N.; Pawase, C.J.; Chang, K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Appl. Sci. Basel 2021, 11, 3417. [Google Scholar] [CrossRef]
- Bresenham, J. Algorithm for computer control of a digital plotter. IBM Syst. J. 1965, 4, 25–30. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, E. Virtual Reality Technology of Multi UAVEarthquake Disaster Path Optimization. Math. Probl. Eng. 2021, 2021, 5525560. [Google Scholar] [CrossRef]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986. [Google Scholar]
- Kurdi, H.; Almuhalhel, S.; Elgibreen, H.; Qahmash, H.; Albatati, B.; Al-Salem, L.; Almoaiqel, G. Tide-Inspired Path Planning Algorithm for Autonomous Vehicles. Remote Sens. 2021, 13, 4644. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, Y.; Li, W. A Deep Learning Trained by Genetic Algorithm to Improve the Efficiency of Path Planning for Data Collection with Multi-UAV. IEEE Access 2021, 9, 7994–8005. [Google Scholar] [CrossRef]
- Fan, X.; Sayers, W.; Zhang, S.; Han, Z.; Ren, L.; Chizari, H. Review and Classification of Bio-inspired Algorithms and Their Applications. J. Bionic Eng. 2020, 17, 611–631. [Google Scholar] [CrossRef]
- Cakici, F.; Ergezer, H.; Irmak, U.; Leblebicioglu, M.K. Coordinated guidance for multiple UAVs. Trans. Inst. Meas. Control 2016, 38, 593–601. [Google Scholar] [CrossRef]
- Wilhelm, J.; Rojas, J.; Eberhart, G.; Perhinschi, M. Heterogeneous Aerial Platform Adaptive Mission Planning Using Genetic Algorithms. Unmanned Syst. 2017, 5, 19–30. [Google Scholar] [CrossRef]
- Wu, W.; Cui, N. A distributed and integrated method for cooperative mission planning of multiple heterogeneous UAVs. Aircr. Eng. Aerosp. Technol. 2018, 90, 1403–1412. [Google Scholar] [CrossRef]
- Lee, D.; Shim, D.H. A Mini-drone Development, Genetic Vector Field-Based Multi-agent Path Planning, and Flight Tests. Int. J. Aeronaut. Space Sci. 2018, 19, 785–797. [Google Scholar] [CrossRef]
- Cao, Y.; Wei, W.; Bai, Y.; Qiao, H. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm. Clust. Comput. J. Netw. Softw. Tools Appl. 2019, 22, S5175–S5184. [Google Scholar] [CrossRef]
- Radmanesh, M.; Kumar, M.; Sarim, M. Grey wolf optimization based sense and avoid algorithm in a Bayesian framework for multiple UAV path planning in an uncertain environment. Aerosp. Sci. Technol. 2018, 77, 168–179. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar] [CrossRef]
- Yang, L.; Guo, J.; Liu, Y. Three-Dimensional Uav Cooperative Path Planning Based on the Mp-Cgwo Algorithm. Int. J. Innov. Comput. Inf. Control 2020, 16, 991–1006. [Google Scholar] [CrossRef]
- Perez-Carabaza, S.; Besada-Portas, E.; Lopez-Orozco, J.A.; de la Cruz, J.M. Ant colony optimization for multi-UAV minimum time search in uncertain domains. Appl. Soft Comput. 2018, 62, 789–806. [Google Scholar] [CrossRef]
- Ziyang, Z.; Dongjing, X.; Chen, G. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
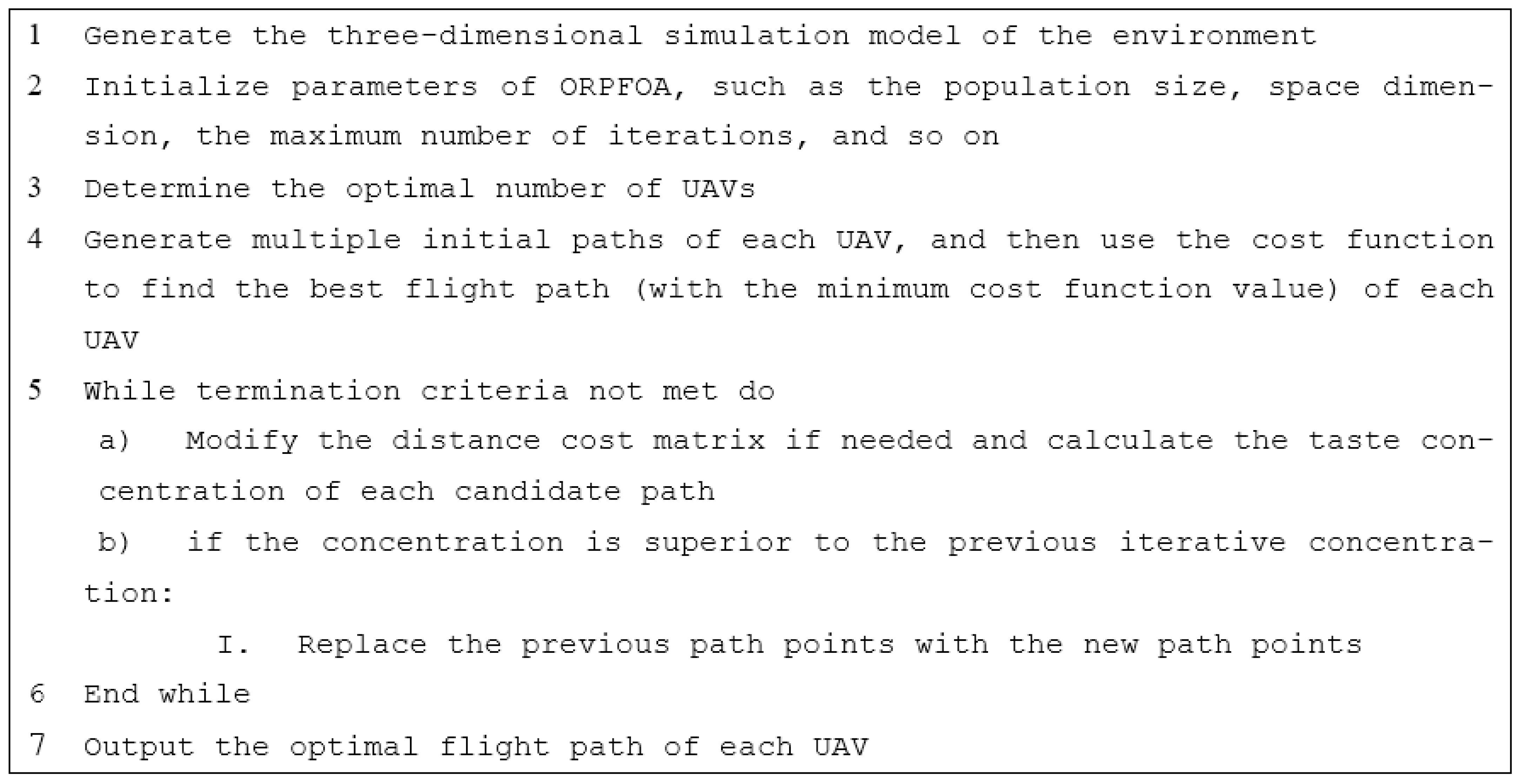
- Li, K.; Ge, F.; Han, Y.; Wang, Y.; Xu, W. Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm. Eng. Appl. Artif. Intell. 2020, 94, 103807. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Q.; Pan, N.; Sun, Y.; Yang, Y. Three-Dimensional Mountain Complex Terrain and Heterogeneous Multi-UAV Cooperative Combat Mission Planning. IEEE Access 2020, 8, 197407–197419. [Google Scholar] [CrossRef]
- Du, Y.-C.; Zhang, M.-X.; Ling, H.-F.; Zheng, Y.-J. Evolutionary Planning of Multi-UAV Search for Missing Tourists. IEEE Access 2019, 7, 73480–73492. [Google Scholar] [CrossRef]
- Sujit, P.B.; Kingston, D.; Beard, R. Cooperative forest fire monitoring using multiple UAVs. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 4875–4880. [Google Scholar] [CrossRef]
- Edison, E.; Shima, T. Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Comput. Oper. Res. 2011, 38, 340–356. [Google Scholar] [CrossRef]
- Liang, Y.; Jia, Y.; Du, J.; Zhang, J. Vector field guidance for three-dimensional curved path following with fixed-wing UAVs. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 1187–1192. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Alhady, S.S.N.; Ali, A.; Mir, I.; Jalil, A. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO–GWO optimization algorithm with evolutionary programming. J. Ambient Intell. Humaniz. Comput. 2020, 12, 7873–7890. [Google Scholar] [CrossRef]
- Guo, J.; Gao, Y.; Cui, G. The path planning for mobile robot based on bat algorithm. Int. J. Autom. Control 2015, 9, 50–60. [Google Scholar] [CrossRef]
- Zhu, W.; Duan, H. Chaotic predator–prey biogeography-based optimization approach for UCAV path planning. Aerosp. Sci. Technol. 2014, 32, 153–161. [Google Scholar] [CrossRef]
- Krishnanand, K.; Ghose, D. A Glowworm Swarm Optimization Based Multi-robot System for Signal Source Localization. In Design and Control of Intelligent Robotic Systems; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; Volume 177. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl. Based Syst. 2016, 14, 120–133. [Google Scholar] [CrossRef]
- Wu, L.; Yuan, X.; Zhou, S.; Wang, Y. Differential evolution algorithm with adaptive second mutation. Control Decis. 2006, 21, 898. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. The Ant System: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. 1992, 26, 29–41. [Google Scholar] [CrossRef]
- Luan, J.; Yao, Z.; Zhao, F.; Song, X. A novel method to solve supplier selection problem: Hybrid algorithm of genetic algorithm and ant colony optimization. Math. Comput. Simul. 2019, 16, 294–309. [Google Scholar] [CrossRef]
- Li, B.; Qi, X.; Yu, B.; Liu, L. Trajectory Planning for UAV Based on Improved ACO Algorithm. IEEE Access 2020, 8, 2995–3006. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Asma, A.; Sadok, B. PSO-based Dynamic Distributed Algorithm for Automatic Task Clustering in a Robotic Swarm. Procedia Comput. Sci. 2019, 159, 1103–1112. [Google Scholar] [CrossRef]
- Tian, D.; Shi, Z. MPSO: Modified particle swarm optimization and its applications. Swarm Evol. Comput. 2018, 41, 49–68. [Google Scholar] [CrossRef]
- Pan, W.-T. A new Fruit Fly Optimization Algorithm: Taking the financial distress model as an example. Knowl.-Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Iscan, H.; Gunduz, M. Parameter Analysis on Fruit Fly Optimization Algorithm. J. Comput. Commun. 2014, 2, 137–141. [Google Scholar] [CrossRef]
- Li, Y.; Han, M. Improved fruit fly algorithm on structural optimization. Brain Inform. 2020, 7, 1. [Google Scholar] [CrossRef]
- Zhang, B.; Duan, H. Three-Dimensional Path Planning for Uninhabited Combat Aerial Vehicle Based on Predator-Prey Pigeon-Inspired Optimization in Dynamic Environment. IEEE/ACM Trans. Comput. Biol. Bioinform. 2017, 14, 97–107. [Google Scholar] [CrossRef]
- Krink, T.; Løvbjerg, M. The LifeCycle Model: Combining Particle Swarm Optimisation, Genetic Algorithms and HillClimbers. In Parallel Problem Solving from Nature—PPSN VII.; Guervós, J.J.M., Adamidis, P., Beyer, H.-G., Schwefel, H.-P., Fernández-Villacañas, J.-L., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2002; Volume 2439, pp. 621–630. ISBN 978-3-540-44139-7. [Google Scholar]
- Shen, H.; Zhu, Y.; Liang, X. Lifecycle-Based Swarm Optimization Method for Numerical Optimization. Discret. Dyn. Nat. Soc. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Flores-Caballero, G.; Rodriguez-Molina, A.; Aldape-Perez, M.; Villarreal-Cervantes, M.G. Optimized Path-Planning in Continuous Spaces for Unmanned Aerial Vehicles Using Meta-Heuristics. IEEE Access 2020, 8, 176774–176788. [Google Scholar] [CrossRef]
- Kar, A.K. Bio inspired computing—A review of algorithms and scope of applications. Expert Syst. Appl. 2016, 59, 20–32. [Google Scholar] [CrossRef]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Ayawli, B.B.K.; Chellali, R.; Appiah, A.Y.; Kyeremeh, F. An Overview of Nature-Inspired, Conventional, and Hybrid Methods of Autonomous Vehicle Path Planning. J. Adv. Transp. 2018, 2018, 8269698. [Google Scholar] [CrossRef]





















| Ref. | Year | Discussion | Focus | ||
|---|---|---|---|---|---|
| Bio-Inspiration | Multi-UAV | Mission Type | |||
| [8] | 2020 | Only PSO | Not considered | Not considered | They analyzed the previous work based on Path length; Optimality; Completeness; Cost efficient; Time efficient; Energy-efficient; Robustness; Collision avoidance |
| [9] | 2019 | Not considered | Considered multi-robot only | Not considered | They analyzed the previous work based on environment (goal and obstacle), hybrid approach or not, multi-robot, real-time, simulation result, and Kinematic analysis |
| [10] | 2020 | Not considered | Not considered | Not considered | They classified the previous work based on task, centralized/decentralized, environment known or unknown, real-time, collision avoidance among UAVs, connectivity, formation, synchronicity, heading, and coordination |
| [11] | 2018 | Not considered | Not considered | Not considered | They reviewed pertinent research concerning the various Computational Intelligence algorithms used in UAV path-planning, the categories of time domain in UAV path-planning, namely offline and online, and the types of environment models, namely 2D and 3D. |
| [12] | 2022 | Not considered | Consider multi-UAV | Not considered | They discussed different path-planning approaches in terms of contributions and limitations only |
| [13] | 2022 | PSO, ACO, Artificial Bee Colony, PIO, GWO, Differential Evolution algorithm, GA | Considered multi-UAV | Not considered | They discussed classical methods, heuristics, meta-heuristics, machine learning, and hybrid algorithms of path planning. They analyzed the approaches based on targeted objectives, considered constraints, and environments |
| Attribute | Value/Description | ||
|---|---|---|---|
| Paper info | Title | The paper title | |
| Year | The year when the paper was published in WoS | ||
| Proposed approach | Name | The specific title and acronym used in the paper to refer to the proposed approach. | |
| Type | Original, enhanced, or hybrid | ||
| Application domain | The context in which the path planning was applied in the proposed approach | ||
| Problem | Origin | One or multiple | |
| Goal | One or multiple | ||
| Known or unknown or probability known | |||
| Static or dynamic | |||
| UAVs | Team | Homogeneous or heterogeneous | |
| CA | With UAVs With obstacles With both UAVs and obstacles None | ||
| Environment | Representation | 2D or 3D | |
| Map | Known, unknown, or partially known | ||
| Evolution | Static, dynamic, or hybrid | ||
| Dynamic element (obstacles, other UAVs, or both) | |||
| Algorithm | Coordination | Communication | Explicit or implicit |
| Control | Centralized, decentralized, or distributed | ||
| Scope | Local, global, or hybrid | ||
| Planning mode | Online, offline or hybrid | ||
| Objective function | Type | Single, single with weighted-sum or multi | |
| Criteria | Minimize or maximize | ||
| Constraints | List of problem constraints | ||
| Evaluation | Approach | Real system or simulation | |
| Benchmarks | List of benchmark algorithms used in the evaluation against the paper’s proposed approach | ||
| Performance measures | The indicators used to assess the achievements of the proposed approach | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljalaud, F.; Kurdi, H.; Youcef-Toumi, K. Bio-Inspired Multi-UAV Path Planning Heuristics: A Review. Mathematics 2023, 11, 2356. https://doi.org/10.3390/math11102356
Aljalaud F, Kurdi H, Youcef-Toumi K. Bio-Inspired Multi-UAV Path Planning Heuristics: A Review. Mathematics. 2023; 11(10):2356. https://doi.org/10.3390/math11102356
Chicago/Turabian StyleAljalaud, Faten, Heba Kurdi, and Kamal Youcef-Toumi. 2023. "Bio-Inspired Multi-UAV Path Planning Heuristics: A Review" Mathematics 11, no. 10: 2356. https://doi.org/10.3390/math11102356
APA StyleAljalaud, F., Kurdi, H., & Youcef-Toumi, K. (2023). Bio-Inspired Multi-UAV Path Planning Heuristics: A Review. Mathematics, 11(10), 2356. https://doi.org/10.3390/math11102356