
A Multi-View Approach for Regional Parking Occupancy Prediction with Attention Mechanisms

Abstract
:1. Introduction
- In addition to the local view of adjacency, we consider the similarity in occupancy changes between parking lots in a global view to introduce more helpful information for prediction. The similarity between parking lots is determined by a typical metric for linear correlation, i.e., Pearson correlation coefficient.
- We design a hybrid graph convolution network to extract spatial features and integrate temporal pattern attention (TPA) to assign reasonable weights to different spatial features.
- The proposed approach HGLT is tested on a real-world dataset, and the results of the experiment empirically demonstrate that HGLT outperforms the representative models, and each component in the proposed method is effective.
2. Related Work
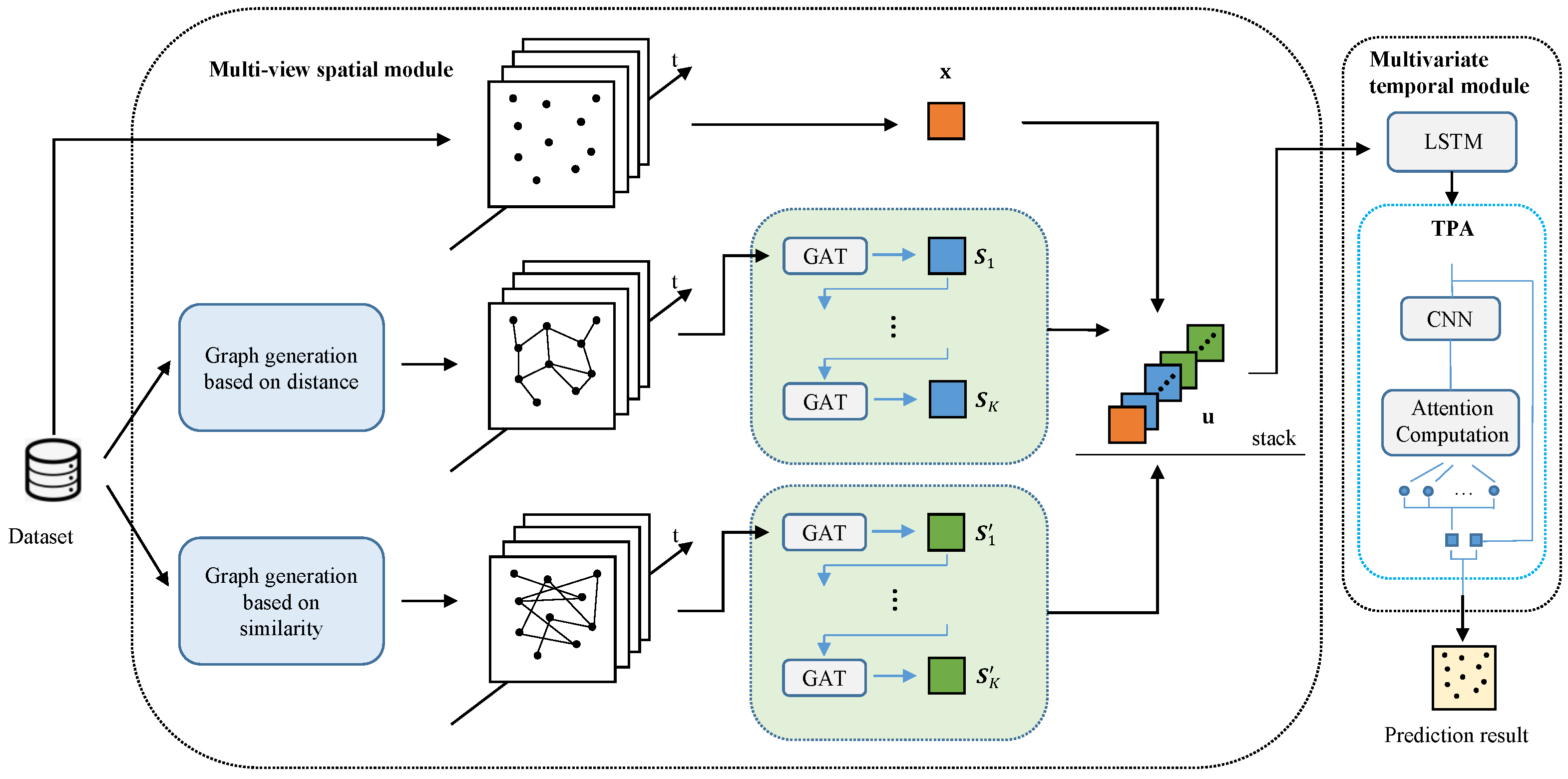
3. Methodology
3.1. Problem Definition
3.2. Multi-View Spatial Module
3.2.1. Graph Convolution Based on Distance
3.2.2. Graph Convolution Based on Similarity
3.3. Multivariate Temporal Module
3.3.1. Long Short-Term Memory
3.3.2. Temporal Pattern Attention
4. Experiments and Results
4.1. Data Description
4.2. Evaluation Metrics
4.3. Experimental Setup
4.4. Experiment Results and Discussion
4.4.1. Comparison Experiment
4.4.2. Ablation Experiment
4.4.3. Feature Importance
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Assemi, B.; Baker, D.; Paz, A. Searching for on-street parking: An empirical investigation of the factors influencing cruise time. Transp. Policy 2020, 97, 186–196. [Google Scholar] [CrossRef]
- Luleseged, T.S.; Di, M. Cooperative Multiagent System for Parking Availability Prediction Based on Time Varying Dynamic Markov Chains. J. Adv. Transp. 2017, 2017, 1760842. [Google Scholar]
- Bock, F.; Di Martino, S.; Origlia, A. Smart Parking: Using a Crowd of Taxis to Sense On-Street Parking Space Availability. IEEE Trans. Intell. Transp. Syst. 2020, 21, 496–508. [Google Scholar] [CrossRef]
- Qian, Z.S.; Rajagopal, R. Optimal dynamic parking pricing for morning commute considering expected cruising time. Transp. Res. Part C Emerg. Technol. 2014, 48, 468–490. [Google Scholar] [CrossRef]
- You, L.; Danaf, M.; Zhao, F.; Guan, J.; Azevedo, C.L.; Atasoy, B.; Ben-Akiva, M. A Federated Platform Enabling a Systematic Collaboration Among Devices, Data and Functions for Smart Mobility. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4060–4074. [Google Scholar] [CrossRef]
- Wang, P.; Fu, Y.; Liu, G.; Hu, W.; Aggarwal, C. Human Mobility Synchronization and Trip Purpose Detection with Mixture of Hawkes Processes. In Proceedings of the 23rd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining, Halifax, NS, USA, 13–17 August 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 495–503. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, C.; Lu, X.; Teng, M.; Zhu, H.; Xiong, H. Point-of-Interest Demand Modeling with Human Mobility Patterns. In Proceedings of the KDD’17: Proceedings of the 23rd Acm Sigkdd International Conference on Knowledge Discovery and Data Mining, Halifax, NS, USA, 13–17 August 2017; Assoc Comp Machinery SIGKDD: New York, NY, USA, 2017; pp. 947–955. [Google Scholar] [CrossRef]
- Ma, R.; Chen, S.; Zhang, H.M. Time series relations between parking garage occupancy and traffic speed in macroscopic downtown areas—A data driven study. J. Intell. Transp. Syst. 2021, 25, 423–438. [Google Scholar] [CrossRef]
- Khan, Z.; Khan, S.M.; Dey, K.; Chowdhury, M. Development and Evaluation of Recurrent Neural Network-Based Models for Hourly Traffic Volume and Annual Average Daily Traffic Prediction. Transp. Res. Record 2019, 2673, 489–503. [Google Scholar] [CrossRef]
- Zhu, H.; Xie, Y.; He, W.; Sun, C.; Zhu, K.; Zhou, G.; Ma, N. A Novel Traffic Flow Forecasting Method Based on RNN-GCN and BRB. J. Adv. Transp. 2020, 2020, 7586154. [Google Scholar] [CrossRef]
- Zhang, D.; Li, J. Multi-View Fusion Neural Network for Traffic Demand Prediction. Inf. Sci. 2023, 646, 119303. [Google Scholar] [CrossRef]
- Hu, H.; Lin, Z.; Hu, Q.; Zhang, Y. Attention Mechanism With Spatial-Temporal Joint Model for Traffic Flow Speed Prediction. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16612–16621. [Google Scholar] [CrossRef]
- Shih, S.Y.; Sun, F.K.; Lee, H.Y. Temporal pattern attention for multivariate time series forecasting. Mach. Learn. 2019, 108, 1421–1441. [Google Scholar] [CrossRef]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Liò, P.; Bengio, Y. Graph Attention Networks. arXiv 2017, arXiv:1710.10903. [Google Scholar]
- Feng, W.; Zhu, Q.; Zhuang, J.; Yu, S. An expert recommendation algorithm based on Pearson correlation coefficient and FP-growth. Clust. Comput. J. Netw. Softw. Tools Appl. 2019, 22, S7401–S7412. [Google Scholar] [CrossRef]
- Balmer, M.; Weibel, R.; Huang, H. Value of incorporating geospatial information into the prediction of on-street parking occupancy—A case study. Geo-Spat. Inf. Sci. 2021, 24, 438–457. [Google Scholar] [CrossRef]
- Tamrazian, A.; Qian, Z.; Rajagopal, R. Where is my parking spot? Online and offline prediction of time-varying parking occupancy. Transp. Res. Rec. 2015, 2489, 77–85. [Google Scholar] [CrossRef]
- Yu, F.; Guo, J.; Zhu, X.; Shi, G. Real Time Prediction of Unoccupied Parking Space Using Time Series Model. In Proceedings of the 3rd International Conference on Transportation Information and Safety (ICTIS 2015), Wuhan, China, 25–28 June 2015; Yan, X., Hu, Z., Zhong, M., Wu, C., Yang, Z., Eds.; Wuhan University Technol; China Commun Transportat Assoc; ASCE; Canadian Soc Civil Engn. IEEE: Piscataway, NJ, USA, 2015; pp. 370–374. [Google Scholar]
- Xiao, X.; Peng, Z.; Lin, Y.; Jin, Z.; Shao, W.; Chen, R.; Cheng, N.; Mao, G. Parking Prediction in Smart Cities: A Survey. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10302–10326. [Google Scholar] [CrossRef]
- Ji, Y.; Tang, D.; Blythe, P.; Guo, W.; Wang, W. Short-term forecasting of available parking space using wavelet neural network model. IET Intell. Transp. Syst. 2015, 9, 202–209. [Google Scholar] [CrossRef]
- Fan, J.; Hu, Q.; Tang, Z. Predicting vacant parking space availability: An SVR method with fruit fly optimisation. IET Intell. Transp. Syst. 2018, 12, 1414–1420. [Google Scholar] [CrossRef]
- Provoost, J.C.; Kamilaris, A.; Wismans, L.J.J.; Van der Drift, S.; Van Keulen, M. Predicting parking occupancy via machine learning in the web of things. Internet Things 2020, 12, 100301. [Google Scholar] [CrossRef]
- Li, J.; Qu, H.; You, L. An Integrated Approach for the Near Real-Time Parking Occupancy Prediction. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3769–3778. [Google Scholar] [CrossRef]
- Qu, H.; Liu, S.; Li, J.; Zhou, Y.; Liu, R. Adaptation and Learning to Learn (ALL): An Integrated Approach for Small-Sample Parking Occupancy Prediction. Mathematics 2022, 10, 2039. [Google Scholar] [CrossRef]
- Su, H.; Mo, S.; Peng, S.; Farhi, N. Short-Term Prediction of Time-Varying Passenger Flow for Intercity High-Speed Railways: A Neural Network Model Based on Multi-Source Data. Mathematics 2023, 11, 3446. [Google Scholar] [CrossRef]
- You, L.; Liu, S.; Chang, Y.; Yuen, C. A Triple-Step Asynchronous Federated Learning Mechanism for Client Activation, Interaction Optimization, and Aggregation Enhancement. IEEE Internet Things J. 2022, 9, 24199–24211. [Google Scholar] [CrossRef]
- Fan, J.; Hu, Q.; Xu, Y.; Tang, Z. Predicting vacant parking space availability: A long short-term memory approach. IEEE Intell. Trans. Syst. Mag. 2020, 14, 129–143. [Google Scholar] [CrossRef]
- Zeng, C.; Ma, C.X.; Wang, K.; Cui, Z.H. Predicting vacant parking space availability: A DWT-Bi-LSTM model. Phys. A Stat. Mech. Appl. 2022, 599, 127498. [Google Scholar] [CrossRef]
- Rajabioun, T.; Ioannou, P.A. On-Street and Off-Street Parking Availability Prediction Using Multivariate Spatiotemporal Models. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2913–2924. [Google Scholar] [CrossRef]
- Fusek, R.; Mozdren, K.; Surkala, M.; Sojka, E. AdaBoost for Parking Lot Occupation Detection. In Proceedings of the 8th International Conference On Computer Recognition Systems Cores 2013, Wroclaw, Poland, 25–27 May 2013; Burduk, R., Jackowski, K., Kurzynski, M., Wozniak, M., Zolnierek, A., Eds.; CH-6330: Cham, Switzerland, 2013; Volume 226, pp. 681–690. [Google Scholar] [CrossRef]
- Ghosal, S.; Bani, A.; Amrouss, A.; El Hallaoui, I. A Deep Learning Approach to Predict Parking Occupancy using Cluster Augmented Learning Method. In Proceedings of the 2019 International Conference on Data Mining Workshops (ICDMW), Beijing, China, 8–11 November 2019; Papapetrou, P., Cheng, X., He, Q., Eds.; IEEE: Piscataway, NJ, USA, 2019; pp. 581–586. [Google Scholar]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Yu, P.S. A Comprehensive Survey on Graph Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4–24. [Google Scholar] [CrossRef]
- Zhang, Z.; Cui, P.; Zhu, W. Deep Learning on Graphs: A Survey. IEEE Trans. Knowl. Data Eng. 2022, 34, 249–270. [Google Scholar] [CrossRef]
- Tang, C.; Sun, J.; Sun, Y.; Peng, M.; Gan, N. A General Traffic Flow Prediction Approach Based on Spatial-Temporal Graph Attention. IEEE Access 2020, 8, 153731–153741. [Google Scholar] [CrossRef]
- Cui, Z.; Henrickson, K.; Ke, R.; Wang, Y. Traffic Graph Convolutional Recurrent Neural Network: A Deep Learning Framework for Network-Scale Traffic Learning and Forecasting. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4883–4894. [Google Scholar] [CrossRef]
- Liang, M.; Liu, R.W.; Zhan, Y.; Li, H.; Zhu, F.; Wang, F.Y. Fine-Grained Vessel Traffic Flow Prediction With a Spatio-Temporal Multigraph Convolutional Network. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23694–23707. [Google Scholar] [CrossRef]
- Yang, S.; Ma, W.; Pi, X.; Qian, S. A deep learning approach to real-time parking occupancy prediction in transportation networks incorporating multiple spatio-temporal data sources. Transp. Res. Part C-Emerg. Technol. 2019, 107, 248–265. [Google Scholar] [CrossRef]
- Xiao, X.; Jin, Z.; Hui, Y.; Xu, Y.; Shao, W. Hybrid Spatial-Temporal Graph Convolutional Networks for On-Street Parking Availability Prediction. Remote Sens. 2021, 13, 3338. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, H.; Liu, Y.; Zhou, J.; Xu, T.; Xiong, H. Semi-Supervised City-Wide Parking Availability Prediction via Hierarchical Recurrent Graph Neural Network. IEEE Trans. Knowl. Data Eng. 2022, 34, 3984–3996. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Rong, Y.; Xu, Z.; Yan, R.; Xu, M. Du-Parking: Spatio-Temporal Big Data Tells You Realtime Parking Availability. In Proceedings of the 24th ACM SIGKDD International Conference, London, UK, 19–23 August 2018. [Google Scholar]
- Tianlong, W.; Feng, C.; Yun, W. Graph Attention LSTM Network: A New Model for Traffic Flow Forecasting. In Proceedings of the 2018 5th International Conference On Information Science And Control Engineering (Icisce 2018), Zhengzhou, China, 20–22 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 241–245. [Google Scholar] [CrossRef]
- Sugiyama, T.; Kubota, A.; Sugiyama, M.; Cole, R.; Owen, N. Distances walked to and from local destinations: Age-related variations and implications for determining buffer sizes. J. Transp. Health 2019, 15, 100621. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Structure | ||
|---|---|---|
| GAT | Input | (batch, N, l, G) |
| Output | (batch, N, l, G) | |
| LSTM | Input | (batch, l, m) |
| Hidden | (batch, l, m) | |
| Layer | 2 | |
| TPA | Input | (batch, l, m) |
| Output | (batch, N) |
| Model | Param | Value | Comment |
|---|---|---|---|
| all models | 0.001 | learning rate | |
| max epoch | 2000 | - | |
| optimizer | Adam | - | |
| loss function | MSE | - | |
| l | 12 | sequence length | |
| 3, 6, 9, 12 | prediction interval | ||
| Graph-based models | K | 2 | the number of graph propagation |
| D | 2 km | the threshold of distance-based adjacency | |
| HGLT | C | 0.4 | the threshold of Pearson-based similarity |
| m | 5 | the number of feature maps | |
| k | 5 | the number of the CNN filters in TPA | |
| Du-parking | - | - | ref to the original paper. |
| Metrics () | MSE | RMSE | ||||||||
| Model | 15 min | 30 min | 45 min | 60 min | Average | 15 min | 30 min | 45 min | 60 min | Average |
| GAT | 0.32 | 0.39 | 0.47 | 0.56 | 0.43 | 5.66 | 6.25 | 6.86 | 7.45 | 6.56 |
| FCNN | 0.09 | 0.15 | 0.23 | 0.32 | 0.20 | 3.01 | 3.91 | 4.78 | 5.61 | 4.33 |
| Du-parking | 0.08 | 0.14 | 0.22 | 0.31 | 0.19 | 2.80 | 3.78 | 4.72 | 5.59 | 4.22 |
| GCNN + LSTM | 0.08 | 0.14 | 0.21 | 0.29 | 0.18 | 2.78 | 3.70 | 4.58 | 5.40 | 4.11 |
| LSTM | 0.07 | 0.12 | 0.19 | 0.27 | 0.16 | 2.70 | 3.49 | 4.35 | 5.20 | 3.94 |
| GATLSTM | 0.06 | 0.11 | 0.18 | 0.25 | 0.15 | 2.36 | 3.30 | 4.19 | 5.03 | 3.72 |
| proposed | 0.05 | 0.09 | 0.17 | 0.23 | 0.14 | 2.17 | 3.04 | 4.09 | 4.84 | 3.53 |
| Metrics () | MAE | MAPE | ||||||||
| Model | 15 min | 30 min | 45 min | 60 min | Average | 15 min | 30 min | 45 min | 60 min | Average |
| GAT | 4.35 | 4.72 | 5.11 | 5.49 | 4.92 | 36.11 | 38.24 | 40.54 | 43.06 | 39.49 |
| FCNN | 1.79 | 2.36 | 2.91 | 3.46 | 2.63 | 8.60 | 12.02 | 15.65 | 19.42 | 13.92 |
| Du-parking | 1.72 | 2.32 | 2.89 | 3.45 | 2.60 | 12.29 | 15.35 | 18.60 | 22.04 | 17.07 |
| GCNN + LSTM | 1.73 | 2.27 | 2.80 | 3.30 | 2.52 | 10.39 | 12.81 | 15.28 | 17.75 | 14.06 |
| LSTM | 1.61 | 2.13 | 2.68 | 3.22 | 2.41 | 8.31 | 10.94 | 13.41 | 16.09 | 12.19 |
| GATLSTM | 1.43 | 2.01 | 2.58 | 3.13 | 2.29 | 7.44 | 9.39 | 12.32 | 15.68 | 11.21 |
| proposed | 1.38 | 1.85 | 2.61 | 2.98 | 2.21 | 6.68 | 8.13 | 12.23 | 13.41 | 10.11 |
| Metrics () | RAE | |||||||||
| Model | 15 min | 30 min | 45 min | 60 min | Average | 15 min | 30 min | 45 min | 60 min | Average |
| GAT | 30.55 | 33.13 | 35.84 | 38.50 | 34.51 | 28.74 | 20.68 | 12.58 | 5.34 | 16.83 |
| FCNN | 12.55 | 16.54 | 20.44 | 24.27 | 18.45 | 92.03 | 86.84 | 80.67 | 73.62 | 83.29 |
| Du-parking | 12.06 | 16.28 | 20.30 | 24.21 | 18.21 | 92.86 | 87.42 | 81.03 | 73.87 | 83.79 |
| GCNN + LSTM | 12.11 | 15.95 | 19.61 | 23.11 | 17.69 | 90.89 | 84.84 | 78.07 | 71.23 | 81.26 |
| LSTM | 11.29 | 14.91 | 18.77 | 22.58 | 16.89 | 93.06 | 88.06 | 81.82 | 74.66 | 84.40 |
| GATLSTM | 10.00 | 14.13 | 18.10 | 21.97 | 16.05 | 93.81 | 88.58 | 82.34 | 75.16 | 84.97 |
| proposed | 9.71 | 12.95 | 18.29 | 20.91 | 15.47 | 94.58 | 90.12 | 82.09 | 77.37 | 86.04 |
| Metrics () | MSE | RMSE | ||||||||
| Model | 15 min | 30 min | 45 min | 60 min | Average | 15 min | 30 min | 45 min | 60 min | Average |
| * LSTM | 0.15 | 0.22 | 0.30 | 0.40 | 0.27 | 3.82 | 4.69 | 5.52 | 6.31 | 5.09 |
| * Adjacency | 0.11 | 0.18 | 0.26 | 0.34 | 0.22 | 3.36 | 4.23 | 5.05 | 5.85 | 4.62 |
| * Similarity | 0.11 | 0.17 | 0.25 | 0.35 | 0.22 | 3.27 | 4.17 | 5.05 | 5.95 | 4.61 |
| * TPA | 0.07 | 0.12 | 0.19 | 0.27 | 0.16 | 2.59 | 3.49 | 4.35 | 5.16 | 3.90 |
| Full | 0.05 | 0.09 | 0.17 | 0.23 | 0.14 | 2.17 | 3.04 | 4.09 | 4.84 | 3.53 |
| Metrics () | MAE | MAPE | ||||||||
| Model | 15 min | 30 min | 45 min | 60 min | Average | 15 min | 30 min | 45 min | 60 min | Average |
| * LSTM | 2.72 | 3.23 | 3.72 | 4.19 | 3.47 | 24.09 | 27.14 | 29.97 | 32.79 | 28.50 |
| * Adjacency | 2.07 | 2.62 | 3.15 | 3.67 | 2.88 | 10.96 | 13.94 | 16.90 | 19.91 | 15.43 |
| * Similarity | 2.03 | 2.58 | 3.13 | 3.72 | 2.86 | 10.38 | 13.12 | 16.10 | 20.17 | 14.94 |
| * TPA | 1.59 | 2.15 | 2.70 | 3.21 | 2.41 | 7.13 | 9.55 | 12.00 | 14.61 | 10.82 |
| Full | 1.38 | 1.85 | 2.61 | 2.98 | 2.21 | 6.68 | 8.13 | 12.23 | 13.41 | 10.11 |
| Metrics () | RAE | |||||||||
| Model | 15 min | 30 min | 45 min | 60 min | Average | 15 min | 30 min | 45 min | 60 min | Average |
| * LSTM | 19.07 | 22.68 | 26.10 | 29.41 | 24.32 | 79.06 | 71.51 | 64.45 | 56.69 | 67.93 |
| * Adjacency | 14.52 | 18.37 | 22.13 | 25.76 | 20.19 | 88.79 | 82.69 | 75.70 | 68.03 | 78.80 |
| * Similarity | 14.22 | 18.11 | 21.94 | 26.09 | 20.09 | 87.68 | 80.32 | 72.36 | 65.07 | 76.36 |
| * TPA | 11.13 | 15.10 | 18.93 | 22.52 | 16.92 | 92.56 | 87.10 | 80.64 | 73.91 | 83.55 |
| Full | 9.71 | 12.95 | 18.29 | 20.91 | 15.47 | 94.58 | 90.12 | 82.09 | 77.37 | 86.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, W.; Kuang, H.; Lai, X.; Li, J. A Multi-View Approach for Regional Parking Occupancy Prediction with Attention Mechanisms. Mathematics 2023, 11, 4510. https://doi.org/10.3390/math11214510
Ye W, Kuang H, Lai X, Li J. A Multi-View Approach for Regional Parking Occupancy Prediction with Attention Mechanisms. Mathematics. 2023; 11(21):4510. https://doi.org/10.3390/math11214510
Chicago/Turabian StyleYe, Wei, Haoxuan Kuang, Xinjun Lai, and Jun Li. 2023. "A Multi-View Approach for Regional Parking Occupancy Prediction with Attention Mechanisms" Mathematics 11, no. 21: 4510. https://doi.org/10.3390/math11214510
APA StyleYe, W., Kuang, H., Lai, X., & Li, J. (2023). A Multi-View Approach for Regional Parking Occupancy Prediction with Attention Mechanisms. Mathematics, 11(21), 4510. https://doi.org/10.3390/math11214510