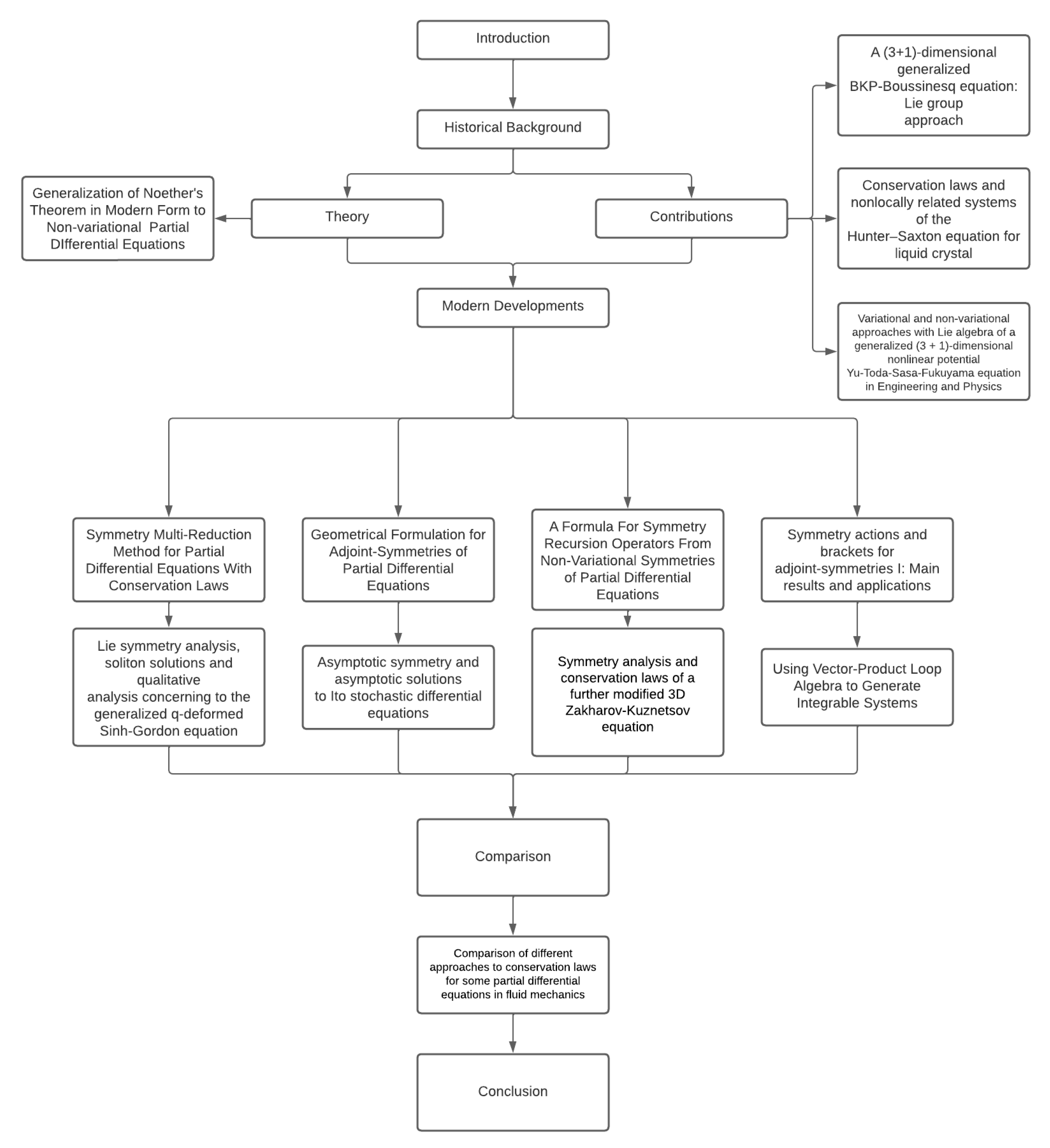
In this section, the information of four papers will be synthesized; each one of them gives a new result in non-related aspects of the same method; therefore, each paper will have its own subsection to explain them in detail.
The first paper in the list gives a geometrical interpretation of the adjoint-symmetries for PDEs.
The second paper listed relates the method of multipliers with the symmetry multi-reduction method generalizing it.
The third paper listed gives a formula to derive symmetry reduction operators from non-variational symmetries for PDEs.
The last paper is a study of the algebraic structure for general PDE systems.
At the end of each section of this subsection, an example of a relevant use of this new development is presented and briefly discussed for better understanding of the new results.
3.1. Geometrical Formulation for Adjoint-Symmetries of Partial Differential Equations
The geometrical interpretation of an infinitesimal symmetry is well known as the tangent vector field to the solution space of the PDE; having this geometrical interpretation of the infinitesimal symmetries gives a more accessible way for other fields such as physics or applied mathematics to apply and understand this type of symmetry with respect to the PDE system.
This type of geometrical interpretation was not developed for adjoint-symmetries until the publication of the paper underlying this section; as shown later, giving adjoint-symmetries a geometrical interpretation would make it easier to apply this new type of symmetry to any PDE system and would also help to better understand the structure of these mathematical entities.
The geometrical interpretation of adjoint-symmetries was found to be evolutionary one-forms and for evolutionary systems their geometric meaning corresponds to one-forms that are invariant under the flow of the system being studied.
More generally, adjoint-symmetries of the evolution system with spacial constraints are one-forms invariant up to a functional multiplier of normal one-forms related to the constraint equations [
16].
To present these results, first we have to write the tools of jet calculus needed in the language of geometrical algebra; we use the following notation recovered from [
16].
Independent variables are defined as , and dependent variables are defined as , . Derivative variables are denoted by the use of subscripts using the following multi-index notation: , , ; ,, .
Also, the following useful notation is used:
denotes the set
of all the derivative variables with the order of
;
the set
is defined as the set of all derivative variables of all orders up to
. The summation convention for repeated indices is used throughout this section [
16].
Jet space
J is defined as earlier. A smooth function
defines a point in jet space
J at any
; the values
and the derivative values
for all orders
give a map,
In jet space, the primitive geometric objects consist of partial derivatives
,
and differentials
These quantities have the following relationship (hooking relations):
The following geometric contact one-forms will be helpful later:
Total derivates are given by . Higher total derivatives are defined by , , .
A differential is defined as a function
defined on a finite jet space
of order
. The Fréchet derivative for a differential function f is defined as
This operator acts on differential functions
. The adjoint Fréchet derivative for a differential function f is defined as
which also acts on differential functions
.
The second Fréchet derivative is defined as
The Euler operator is defined as
Higher Euler operators are defined as
Fréchet derivatives and Euler operators are related by
The Fréchet derivative and its adjoint are related by
A vector field in jet space is defined as
A one-form field in jet space is defined as
Geometric partial derivatives
can be interpreted as evolutionary vertical differentials
, where d is the evolutionary version of d:
,
. These objects satisfy the following duality hooking relations
An evolutionary vertical vector field is the geometrical object [
16]
Its dual counterpart is an evolutionary vertical one-form field,
Now, using these definitions and notation we can formulate adjoint-symmetries geometrically, but first we need a general PDE system of order N
where
,
are the independent variables and
,
are the dependent variables.
Next, we need to define a symmetry as a vector field
and the following two determining equations
called the symmetry determining equation and
called the adjoint-symmetry determining equation.
The question is whether there is any geometrical entity that describes . It is a good idea to work in a coordinate-free PDE system defined in jet space and this can be done as follows.
The system of equations defines a set of M surfaces living in finite space The total derivatives of these equations defines sets of surfaces living in the higher-derivative finite spaces .
It is known that symmetry vector fields are also tangent vector fields with respect to
. This can be seen explicitly in the identities:
and
is the normal one-form to the surfaces
. The symmetry determining Equation (
80) gives the result that the prolonged vector field
vanishes thanks to the normal one-form; this then implies that it is tangent to these surfaces iff
is a symmetry of the PDE system.
The normal one-form (
82) gives a relationship between a one-form and an adjoint-symmetry via:
An equivalent one-form is obtained by using integration by parts in this equation:
In the solution space
, this association between one-forms and adjoint-symmetries gives
Using these three results in the following theorem [
16].
Theorem 2. Adjoint-symmetries describes evolutionary one-forms that functionally vanish in the solution space of a PDE system (78). This was formulated for evolutionary vertical vector fields and evolutionary one-forms; these results are easily reformulated using full vector fields and full one-forms given that
Then, the determining equation can be expressed in terms of the one-form [
16]
by
From Theorem 2, a well-known formula is derived; this formula generates a conservation law from a pair consisting of a symmetry and an adjoint-symmetry.
Using these results, the geometrical derivation of three actions of symmetries on adjoint-symmetries are found using Cartan’s formula for the Lie derivative of an adjoint-symmetry one-form (
84).
First, from the relation between symmetries and adjoint-symmetries, we need the functional pairing between a symmetry vector field and an adjoint-symmetry one-form that is given by,
Using this functional pairing, the next theorem can be stated [
16].
Theorem 3. Vanishing of the functional pairing (88) for any symmetry (79) and any adjoint-symmetry (81) corresponds to a conservation lawholding for the PDE system , where the conserved current is given by . Giving the relation between symmetries and adjoint-symmetries.
The action of symmetries on adjoint-symmetries can also be derived in this geometrical formulation noting that for a given PDE system (
78), the set of adjoint-symmetries is also linear space, and as shown in [
57] symmetries of the PDE system have then three different types of actions in this space.
To derive the first symmetry action, the Lie derivative of an adjoint-symmetry one-form with respect to a symmetry vector field is used [
16].
Proposition 1. If is an adjoint-symmetry one-form (84), namely , then its Lie derivative with respect to any symmetry vector yields an adjoint-symmetry one-form,whereare its components. The next formula due to Cartan for the Lie derivative is written using the operations d and ⌋. Using this formula, the following two additional symmetry actions are derived [
16].
Theorem 4. The terms in Cartan’s formulaevaluated on each yield an action of symmetries on adjoint-symmetries. The action produced by the Lie derivative term has the components (91) and the actions produced by the differential term and the hook term, respectively, have the components The three actions (
91), (
93) and (
94) are related by:
where each of these actions describes a mapping on the linear space of adjoint-symmetries
.
The last important result in this paper is the geometrical interpretation of adjoint-symmetries of evolution equations.
To present these results, first a general system of evolution equations of order N is defined as follows
where
t is taken to be time variable,
,
are the space variables and
,
are the dependent variables. The space of solutions will still be denoted
.
For general PDE systems, we can specialize them with via identifying the indices . In , it is assumed that only and its spatial derivatives are contained in addition to t and .
A symmetry is then stated to be an evolutionary vector field,
that satisfies the linearization of the evolution system on
:
The symmetry determining Equation (
98) can now be expressed as:
The following determining equation for adjoint-symmetries
is described in terms of the the adjoint linearization of the evolution system in
:
These two determining equations have a geometrical formulation using the Lie derivative defined using the flow that arises from the evolution system; similar work was carried out in [
58] for ODEs.
It is useful to introduce the following flow vector field
related to the Lie derivative as
From this relationship, the following well-known result can be stated [
16].
Proposition 2. A symmetry of an evolution system (96) is an evolutionary vector field (79) that is invariant under the associated flow (102). In particular, the resulting Lie-derivative vector fieldvanishes iff the functions are the components of a symmetry. For adjoint-symmetries, we introduce the evolutionary one-form Its Lie derivative is given by Then, the adjoint-symmetry determining Equation (100) can be formulated as the functional vanishing of the Lie derivative expression (105). Using this proposition, the following theorem is stated [
16].
Theorem 5. An adjoint-symmetry of an evolution system (96) is an evolutionary one-form (104) that is functionally invariant under the associated flow (105). In particular, the resulting Lie-derivative one-formfunctionally vanishes iff the functions are the components of an adjoint-symmetry. Now, the generalization for evolution equations with spacial constraints is also developed in this paper; this type of system is of high relevance in many areas of physics and applied mathematics; some examples are Maxwell’s equations, incompressible fluid equations, Einstein’s equations, etc.
The constraints consist of spatial equations
The symmetry equation is described by the linearization of the system on
and is written as
The two determining equations (
98) and (
108) can be stated as:
where
is defined as the solution space for the spatial constraint equations.
The determining equation in the adjoint case is found thanks to the adjoint linearization of the full system; this can be stated as:
A geometrical formulation is known in terms of a constrained flow (
102) and gives the next generalization of evolutionary systems [
16].
Theorem 6. A symmetry of a constrained evolution system (96) and (107) is an evolutionary one-form (104) that is functionally invariant under the associated constrained flow (105), up to a functional multiple of the normal one-form arising from the constraints. Another theorem is stated in this paper that gives a geometrical result related to gauge adjoint [
16,
59,
60,
61].
Theorem 7. A gauge adjoint-symmetry is functionally equivalent to a normal one-form associated with the constraint Equation (107). Under the evolution flow, it is mapped into another normal one-form. The paper gives some last remarks on what are interesting paths to further develop these results such as working this constraint equation to a formulation using conditional symmetries and conditional adjoint-symmetries based on the spatial constraints of the system.
Translating these results via secondary calculus [
62,
63], the tool developed by Vinogradov and Krasil’shchik and their coworkers is also advised as an interesting path for further developing the method.
And lastly the authors point out that an interesting path of research would be the full development of the use of adjoint-symmetries for studying specific PDE systems, that is, finding exact solutions, detecting and finding mappings in a target of class of PDEs and detecting integrability of particular PDE systems using this method.
3.3. Symmetry Multi-Reduction Method for Partial Differential Equations with Conservation Laws
This paper [
17] gives an algorithmic method for finding all symmetry-invariant conservation laws for PDEs that have
independent variables and a symmetry algebra of dimensions of at least
.
This is a generalization for the well-known double reduction method.
In this paper, the condition for symmetry invariance of a conservation law is given with the use of multipliers; this is because it makes it possible to obtain symmetry-invariant conservation laws in a direct way.
This is done in order to make the calculation steps of this reduction method easier with respect to the number of steps needed and the complexity of these calculations.
In this paper, various examples are presented; these examples will not be added in this review but any extra information can be found in [
17].
To understand what the reduction method achieves, it is important to remember that symmetries are used for finding group-invariant solutions of PDEs. When finding these solutions for PDEs, what we obtain is a reduced differential equation (DE) that is expressed using less variables and it is expressed in terms of the invariants that the symmetry group possesses.
By solving this reduced DE, one finds the group-invariant solutions; for us to be able to solve this DE sufficiently, many first integrals are needed so the system can reduce its order for finding the quadrature of the reduced DE.
When the reduced DE obtained is an ordinary differential equation (ODE), we can make further reductions of the system if the system of PDE studied is a Lagrangian one; this is possible thanks to the fact that via Noether’s Theorem we can find a local conservation law that will reduce this ODE to a first integral, giving us the quadrature of this reduced ODE.
The double reduction described earlier for PDEs is a direct counterpart of the double reduction of a variational problem describing an ODE system [
65].
The more general reduction method found in [
66,
67] applies not only to variational PDEs but also to non-variational ones; this method has a long story and it was already developed a decade ago.
This method involves finding an invariant symmetry of the corresponding conserved current in a local conservation law of a PDE.
If the system when reduced under the symmetry specified gives a first integral of the ODE, then it is known that this PDE system has a Lagrangian and this first integral obtained using this method is equal to the one obtained by using the Lagrangian reduction method.
This double reduction method has been extended [
68] to PDEs of any number of independent and dependent variables; when carrying out this extension, we find a reduced ODE that describes a PDE having one less independent variable and also an invariant conserved current that is reduced yields a conservation law for this reduced PDE [
67]. This can be further extended for conserved currents invariant modulo a trivial current. This extension requires that the underlying local conservation law is invariant [
11,
69].
In this paper, many applications of the double reduction method are studied [
35,
66,
67,
70,
71,
72,
73,
74,
75,
76,
77,
78].
All of these applications begin by proposing a known conservation law and a known symmetry group for a certain PDE.
Therefore, the method consists of finding a symmetry generator under the conserved current of the given conservation law and this conserved current needs to be strictly invariant or invariant modulo some trivial current.
One problem the method faces is for PDEs that are not of second order; for this type of PDE, the method does not provide sufficient first integrals in order to obtain the quadrature of the PDE.
This paper tries to solve this problem; to do this, first the method does not start by imposing a known conservation law and then working with the symmetries of this conservation law, but instead the method starts by finding the symmetry of the PDE to be used in that case and from this result the conservation laws that are invariant under the symmetry are derived.
This solves the problem for non-second-order PDEs of not having enough first integrals for systems of two independent variables.
Using this approach, further reductions in the ODE are possible.
Second, the reduction in the PDE is considered to be carried out under an algebra of symmetries as opposed to a single symmetry.
This gives a solution for the problem of reducing PDEs with more than two independent variables and gives a reduced system of ODEs with a set of first integrals for finding the quadrature of the system.
Lastly, the condition of symmetry invariance for a given conservation law is written using multipliers; the main goal of this is to make the process algorithmic and therefore make it more straightforward to solve.
Using this approach, the complexity and length of computational steps needed for the reduction method are largely decreased.
We will start with the travelling wave reduction; a travelling wave solution of a PDE
is of the form
where
is the wave speed. The solutions of this system come from an invariance under a translation symmetry
with
and
being the invariants of the symmetry.
The condition of symmetry can then be expressed as
Invariant solutions satisfy the ODE obtained from reducing the PDE
The first integrals for this travelling wave ODE (
119) are now found via the symmetry reduction of the conservation laws that are invariant under X and are then expressed in terms of
with
, where
is the invariants of the system and the canonical coordinate is given by
. When using these new expressions, the conservation law is then rewritten as
Under the action of , the conserved current is mapped via and .
Then, we know that a conservation law is invariant under the travelling wave symmetry iff
describes a mapping to a trivial conserved current (see [
17]):
This invariance condition (
121) is not written in terms of multipliers; as said earlier, formulating this in terms of multipliers gives multiple advantages; the starting point to make this possible is first defining the next mapping of multipliers.
The multiplier mapping
is given by [
11,
69]
where
is the function defined by
.
Symmetry invariance of a conservation law is a multiplier condition [
11,
69]
More details on the derivation of these two expressions can be found in [
17].
For the purposes of this paper, we only need these two main results (
122) and (
123) to rewrite (
121) in an equivalent more useful way [
17]
which holds for the multiplier Q of the conserved current
.
From this invariance condition, the next conserved current is derived in terms of canonical variables [
17]
This is a reduced conservation law (
125) that is a first integral
of the travelling wave ODE (
119). This conservation can be expressed in an explicit form as
which only involves the current
An equivalent formula for the fist integral can be written as [
17]
in terms of a multiplier
where Q is a multiplier for some symmetry invariant conservation law and
is the Jacobian factor that comes from the point transformation from the normal system variables to the canonical ones
.
Then, for any symmetry invariant conservation law for a given PDE
will be reduced to a first integral for a travelling wave ODE
; the conservation laws from here can be derived when solving Equations (
41) and (
124) for Q [
17].
The first integrals then can be solved via (
126) in terms of
which comes from the multiplier Q or from Equation (
128) which is written in terms of the reduced multipliers (
129).
Next is the case of similarity (scaling) reduction; this type of solution of a PDE
takes the form
where
are scaling weights. Solutions for this type of PDE arise from invariance under a scaling symmetry [
17]
The symmetry invariance for this system can be expressed in the solution space
as [
17]
where
represents the scaling weight of the PDE.
The solutions arising from here need to satisfy the reduced ODE corresponding to the PDE.
The reduction can also be stated in terms of the canonical variables having the relationship , where , are invariants of the system and is the canonical coordinate.
A conservation law
is given by
which are functions
and derivatives of
U.
This condition for symmetry invariance can also be written in terms of multipliers for the conserved current
as
from the relations (
126) and (
125). This gives Equation (
128) in terms of multipliers [
17]
where Q is the multiplier of the scaling invariant conservation law;
is the Jacobian for the transformation made between the usual coordinates and the canonical coordinates of the system
.
Then, we can conclude that all conservation laws of a system of PDEs can be obtained by solving (
41) and (
135) for Q.
The first integrals can be obtained via (
126) and (
136) in terms of using the reduced multipliers.
These two multi-reduction methods have a generalization to systems with more independent variables and one symmetry.
These results are further generalized to solvable symmetry algebras. This is possible if the symmetry algebra dimensions are one less than the number of independent variables; if this condition is met, the PDE reduces to an ODE.
In this case, each conservation law of the PDE is described by a first integral of the reduced ODE.
In the paper, two cases with a two-dimensional symmetry algebra in dimensions are discussed.
The first type is a system of line travelling waves and the second type is systems describing line similarity solutions and similarity travelling waves.
To present this, first a discussion on conservation laws, multipliers and symmetries in dimensions is needed.
A local conservation law of a scalar PDE
for
is a continuity equation
holding the solution space
, where T is the conserved density and
is the spatial flux vector. The conserved current is
[
17].
As in the last cases, given a non-trivial conservation law of the PDE , this conservation law comes from a multiplier.
In this case, Q is a function of and derivatives of u, such that is non-singular.
The PDE
admits a point symmetry
. The mapping between multipliers and reduced multipliers
is given by [
11,
69]
where
is defined by
.
The set given by all symmetry-invariant conservation laws under is known to be the subspace of all conservation laws described via the PDE .
When the invariant subspace has dimension
, the reduction method will yield a set of m first integrals for the ODE obtained thanks to the symmetry reduction of
[
17].
Using this definition, we can first develop the case for the reduction by two translations; this is our first case of line travelling waves.
The line travelling wave is a two-dimensional description of a plane wave. These types of waves are described by [
17].
where
and
.
Invariance of a PDE
under the pair of commuting translation symmetries
holding the solution space of the PDE when written in a solved form for a leading derivative.
Line travelling wave solutions
correspond to the reduction
and satisfy the ODE obtained form reducing the PDE [
17].
This equation is a consequence of (
139) as said earlier, where
and
are known as the invariant surface conditions stating that the action of
on the function (
138) vanishes [
17].
The first integrals for Equation (
140) can be derived using this symmetry reduction method applied to the conservation laws found to be invariant under the action of
of the PDE.
This condition of symmetry invariance can be stated again in term of the canonical variables of the system as
given by
and
where c is the speed of the wave. This pair of symmetries together written in canonical variables looks as follows
The transformation (
141) then sends a conservation law in normal variables to an equivalent one written in canonical form [
17]
, with
The invariance condition rewritten in terms of the conservation law multipliers reads as follows [
17]:
All conservation laws again can be obtained via (
41) and (
124).
The formula for the first integrals of this system is then given again by
The transformation using canonical variables is written as
An equivalent multiplier formula is also possible and reads as follows
using a reduced multiplier given by
in terms of the multiplier Q of a symmetry-invariant conservation law with a Jacobian given by
The next part presents results obtained for reduction of scaling and translation symmetries; this type of reduction help to describe line similarity solutions and traveling similarity solutions.
A line solution is a two-dimensional version of a similarity solution (
130) with solutions
This type of solution is invariant under the pair of symmetries of a spatial translation and a scaling [
17]
whose joint invariants are
and
.
A travelling similarity solution, in contrast, is of the form [
17]
This type of solution possess the following two invariant pairs of symmetries
This represents a travelling wave translation and a scaling that is aligned with the translation applied to it; the joint invariants for this are and .
The important connection between these two types of solutions is the algebra described by the symmetries; these two symmetries comprise a solvable algebra with the same commutator structure
where
is known as the structure constant.
The canonical variables satisfy , . These are not joint canonical coordinates because these two symmetries do not commute.
Imposing the conditions , , whereby , after a point transformation between Q and . This is introduced to help carry out the reduction method as similarly as possible to the other cases.
The relevant details that make important the study of algebras with a solvable structure of the symmetry algebra are the condition symmetry invariance (
152) of multipliers
where
is known as the scaling weight of the PDE.
The second invariance condition has an extra term ; this term cancels the term.
This term is related to the solvable structure of the symmetry algebra; this element vanishes in the abelian case,
[
17].
The first integral formulas are the same as (
145), (
147) and (
148) derived in the abelian case
[
17].
Lastly, in this paper the multi-reduction under a non-solvable symmetry algebra is mentioned and some examples are given; the theory is related to other studies in the literature.
The important remark is that the theory developed for solvable symmetries can also be generalized to non-solvable algebras with some conditions.
For a reduction in a PDE with n independent variables and an ODE with the same number of independent variables, we need to impose conditions on the algebra; specifically, the algebra needs to have two invariants; one of these invariants needs to involve the dependent variable of the PDE. For a more formal treatment of this case, see [
79]. As in the solvable case, the ODE inherits for each symmetry one first integral.
Thanks to these first integrals that are functionally independent, one can further reduce the ODE.
The following is a summary of each case. For the case of a PDE system with two independent variables, from a point symmetry an algorithmic approach was found to obtain all symmetry-invariant conservation laws; these objects are then reduced to first integrals of the reduced ODE describing the symmetry-invariant solutions of the PDE.
This is the generalization given in this paper for the double reduction method known in literature.
The multi-reduction method is then generalized to PDEs with independent variables and a symmetry algebra of dimension .
For this case, the method provides a way of obtaining a direct reduction from a PDE to an ODE for a given invariant solution and also a set of first integrals to find the quadrature of the system.
The symmetry algebras do not need to be solvable. The condition of symmetry invariance is also formulated using multipliers, giving an algorithm for finding theses reductions and also giving the invariance condition of the conservation law in the process.
The third result is related to symmetry-invariant conservation law spaces with dimensions of ; this method yields m first integrals knowing if they are trivial or non-trivial thanks to the multipliers.
Next, work in the making [
79] gives a method for finding all conservation laws inherited by a PDE in fewer variables obtained via symmetry reduction of a PDE in more than two independent variables.
The work presented here is completely new and results and examples of how it is used are found in [
17].
Before jumping to the next section, an example of how these results have been used is found in [
44].
3.5. A Formula for Symmetry Recursion Operators from Non-Variational Symmetries of Partial Differential Equations
This paper [
18] gives an explicit formula for finding symmetry recursion for PDEs; these results are given via a newfound connection between variational integrating factors and non-variational symmetries.
The formula obtained in this paper is found to be a special case of an already-existing general formula that exists for pre-symplectic operators that arise from a non-gradient adjoint-symmetry.
The paper also gives a classification for quasilinear second-order PDEs that admit a multiplicative symmetry recursion operator.
These symmetry recursion operators are really important for the theory of linear PDEs and nonlinear integrable PDEs.
These symmetry recursion operators in the linear case are typically derived using the Fréchet derivative of a Lie symmetry that is written in characteristic form.
In the case of integrable evolution PDEs, another symmetry recursion operator is found using the ratio of two compatible Hamiltonian operators.
The main result of this paper gives a symmetry recursion operator arising in a similar way as in linear PDEs for nonlinear integrable PDEs.
Also, a simple explicit formula for a symmetry recursion operator of a Euler–Lagrange PDE is obtained.
This result is related to all the other research carried out on the method of multipliers because the formula uses the Fréchet derivative of a non-variational symmetry of the PDE, this gives a new use for non-variational symmetries, the same symmetries studied in previous papers.
One important thing to note is that the generalized pre-symplectic operator derived here uses adjoint-symmetries that do not necessarily need to be multipliers of the system.
For Euler–Lagrange PDEs, it is found that the generalized pre-symplectic operator mentioned earlier is equivalent to a symmetry recursion operator; also in this case the non-multiplier adjoint-symmetries of the system are found to be equivalent to non-variational symmetries.
For PDEs with no variational structure, a generalized pre-symplectic operator [
82] is found to be a linear differential operator that gives a map between symmetries and adjoint-symmetries, analogously to the case of Hamiltonian evolution equations [
83].
The systems studied in this paper are scalar PDEs of any order , with n independent variables and a single dependent variable u.
The space of solutions will be again denoted
. Most of the results in the first review paper will be used for all these new developments and some new concepts will need to be added as in [
18].
Definition 1. A PDE is a Euler–Lagrange equation, , with a Lagrangian given by a differential function L, iff the Fréchet derivative of G is self-adjoint .
The next lemma is also useful.
Lemma 6. Any Euler–Lagrange PDE that is quasilinear and of second order possesses a Lagrangian L that is of first order.
The definition of pre-symplectic operators [
82].
Definition 2. A generalized pre-symplectic operator is a linear differential operator (in total derivatives) that maps symmetries into adjoint-symmetries.
For pre-Hamiltonian operators [
82].
Definition 3. A generalized pre-Hamiltonian operator is a linear differential operator (in total derivatives) that maps adjoint-symmetries into symmetries.
When this operator is a pre-Hamiltonian operator, it gives rise to a recursion operator that acts on (adjoint) symmetries.
As said earlier, to derive the new results for a general PDE
we need to state the next connection that exist between variational integrating factors, symmetries and adjoint-symmetries [
18].
Proposition 3. If admits a variational integrating factor W, then for any symmetry (in characteristic form) of , there is an adjoint-symmetry .
The mapping
can be iterated when
is Euler–Lagrange, since adjoint-symmetries coincide with symmetries giving that [
18].
Proposition 4. If is Euler–Lagrange and admits a variational integrating factor W, then starting from any symmetry , . Thus, W is a multiplicative recursion operator for symmetries.
From this, the following necessary condition on
G is deduced [
18].
Proposition 5. A Euler–Lagrange PDE admits a non-constant variational integrating factor only if This rank condition (166) constitutes an equation of the form of G. For the case when G is of second order, that is , the rank condition is equivalent to When G is quasilinear by Lemma 6, the Lagrangian for G can be assumed to have the form , so that . Then, we have , which can be used to express (167) in terms of L: From here, we obtain the following result [
18].
Proposition 6. If a quasilinear second-order Euler–Lagrange PDE admits a non-constant variational integrating factor, then the first-order Lagrangian satisfies the Monge–Ampere Equation (168). For the case of general Euler–Lagrange PDEs, if there exist a non-variational Lie point symmetry of the system then an explicit formula for a variational integrating factor can be derived [
18].
Proposition 7. Suppose a Euler–Lagrange equation possesses a non-variational Lie point symmetry . Then, possesses a variational integrating factorwith defined by If this function (169) is non-constant, then it defines a non-trivial multiplicative recursion operator for the symmetries of . To fully state the results of the paper, first a classification is made for non-trivial variational integrating factors and for quasilinear second-order Euler–Lagrange equations in two independent variables [
18].
Theorem 8. Supposeis a Euler–Lagrange PDE, which is quasilinear and translation invariant. If it admits a variational integrating factor that is not a constant, then it is equivalent (modulo a point transformation) to one of the following PDEs: The corresponding variational integrating factors are given bywhere F is an arbitrary function of its arguments. In each case, is a multiplicative recursion operator for symmetries of the corresponding PDE. The next remarks are important for understanding this type of PDE system [
18]
Remark 1. - 1.
A Lagrangian for the PDEs (a)–(c) can be obtained either from the homotopy formulaor integration of the equations , , , . - 2.
Each PDE (a)–(c) possesses a sequence of contact symmetries , , starting from the translation symmetry given by , where are arbitrary constants.
- 3.
All of the PDEs (a)–(c) are of a parabolic type, since their coefficients satisfy the algebraic relation .
- 4.
None of these PDEs can be mapped into the linear parabolic PDE by a contact transformation.
A complete proof of Theorem 8 is found in [
18] and we highly encourage the reader to review this proof.
These results can be generalized to yield non-multiplicative operators [
18].
Theorem 9. Suppose possesses an adjoint-symmetry Q that is not a multiplier, namelyholds for , where is a non-zero linear differential operator in total derivatives whose coefficients are non-singular differential functions on . Thenis a linear differential operator in total derivatives that maps symmetries to adjoint-symmetries. Moreover, when an inverse exists, it maps adjoint-symmetries to symmetries. Such adjoint-symmetry is a multiplier for a conservation law [
18].
Proposition 8. For a symmetry of , the adjoint-symmetry is a multiplier yielding a conservation law of iffholds for . These results applied to an evolution system yield the following result [
18].
Theorem 10. Suppose has an adjoint-symmetry Q that is not a multiplier. Then, the linear differential operator (179), under which symmetries are mapped into adjoint-symmetries, has the skew-symmetric form For a symmetry , the adjoint-symmetry is a multiplier, yielding a conservation law, if and only if For Euler–Lagrange equations, adjoint-symmetries are also symmetries. In this case, the pre-symplectic operator (
179) becomes a recursion operator for symmetries [
18].
Theorem 11. Suppose a Euler–Lagrange equation possesses a symmetry that is not variational, namelyholds for , where is non-zero linear differential operator in total derivatives whose coefficients are non-singular differential functions on . Thenis a linear differential operator that maps symmetries to symmetries. The symmetry recursion operator (
184) is a recursion operation applied to variational symmetries when the following applies.
Proposition 9. If is a variational symmetry of the Euler–Lagrange equation , then is also a variational symmetry of if and only if Remark 2. Given that variational symmetries of Euler–Lagrange equations are the same as a conservation law multiplier by Noether’s Theorem, the condition (185) is necessary for the operator (184) to define a recursion operator on a conservation law multiplier. The condition is sufficient if it holds with in place of P. To compare this with Proposition 7 the case when P is a characteristic function for a given Lie point symmetry is taken into account [
18].
Corollary 1. If is the characteristic function of a non-variational Lie point symmetry of a Euler–Lagrange equation , then the corresponding symmetry recursion operator (184) is , where W is the variational integrating factor. Therefore, recursion operators (
184) need more than Lie point symmetries.
This is stated in the next corollary [
18].
Corollary 2. If is the characteristic function of a non-variational contact symmetry of a Euler–Lagrange equation , with , then the corresponding symmetry recursion operator (184) iswhich is a variational integrating factor. This paper then gives a new form to derive generalized pre-sympletic operators for PDEs, either for the linear or nonlinear systems.
This result also gives new recursion operators for the case of Euler–Lagrange PDEs; these recursion operators work only with non-variational symmetries.
This work can be followed by studying system of PDEs with any number of dependent variables; the authors say they will work in a classification of non-variational symmetries and adjoint-symmetries for interesting classes of PDEs.
The authors also state that a geometrical formulation of these formulas will be studied.
For this paper, the most recent article using these results can be found in [
84]; in this work, the Zakharov–Kuznetsov (ZK) equation is studied.
Firstly, the conservation laws of this equation are found via the method of multipliers and other similar methods but the relevant use of the results presented here is the study of the Hamiltonian structure of the target equation.
A generalized pre-symplectic structure is also found; this structure gives a map between symmetries and adjoint-symmetries.
The details are not presented here but for more details we encourage the reader to check the work carried out in [
84].
3.6. Symmetry Actions and Brackets for Adjoint-Symmetries I: Main Results and Applications
Note that the second part of this paper will not be discussed here because it contains only examples of the results for this paper and in this review only the theory is presented; the second part of the paper can be found in [
20].
In this paper, the algebraic structure of the adjoint linearization equation that holds on the space of solutions to the PDE, also called adjoint-symmetries, is studied.
This work was motivated by the already known relationship that exists between symmetries and adjoint-symmetries.
Several main results are obtained such as the three different linear actions on the linear space of adjoint-symmetries of symmetries.
In this paper, these three new actions found are then used for a construction of bilinear adjoint-symmetry brackets; it is found that one of these brackets describes the pull-back of a symmetry that also has a Lie bracket structure.
The brackets obtained in this paper do not need any local variational structure.
Also, it is found that the last of the symmetry actions derived has a pre-symplectic (Noether) operator encoded; from this bracket, one can then construct a symplectic two-form and also Poisson brackets only for evolution systems.
Note that in the context of Hamiltonian and integrable systems the multipliers are also referred to as cosymmetries [
85,
86].
The existence of an adjoint-symmetry for a given PDE is also known in this context as “nonlinear self-adjointness” [
27].
This paper is a follow-up to the one presented before [
18]; in this paper, scalar PDEs were studied to find a linear mapping from infinitesimal symmetries into adjoint-symmetries for any fixed adjoint-symmetry that is not a multiplier.
This mapping was found to be equivalent to a pre-symplectic operator (Noether) and there exists an analog of this case for the mapping between symmetries and adjoint-symmetries that exist in Hamilton systems thanks to symplectic operators [
87].
The inverse of this mapping is then found to be a pre-Hamiltonian operator.
This paper then expands on these ideas, but for general PDE systems as opposed to only scalar PDEs.
More specifically, the results of this work first show the existence of two different actions of infinitesimal symmetries on adjoint-symmetries.
The first action is found to be a Lie derivative; the second action arises from the adjoint relationship that exists between the determining equation for infinitesimal symmetries and adjoint-symmetries.
If an adjoint-symmetry is also a multiplier, it was found that the two actions mentioned earlier are the actions of symmetries on the multipliers of the system defined in [
11,
69,
88].
The difference between these two actions also describes a third action that vanishes if the adjoint-symmetry is a multiplier.
This third action is a generalization of the pre-symplectic operator for scalar PDEs; the inverse of this action gives the general pre-Hamiltonian operator.
When considering PDEs and Euler–Lagrange PDEs, this action describes a symplectic two-form that has an associated Poisson bracket; these results are expected to be useful in describing a Hamiltonian structure for non-dissipative PDE systems.
These three actions are used to construct bracket structures on the subset of adjoint-symmetries.
The first bracket constructed in the paper is non-symmetric and is the pull-back of the symmetry commutator; it is also a Lie bracket to adjoint-symmetries; the second bracket constructed is also non-symmetric and it does not use the commutator structure of symmetries.
One of these brackets also satisfies the Jacobi identity; therefore, this bracket also encodes a Lie algebra structure to a natural subset of adjoint-symmetries.
A correspondence is also shown to exist between Lie subalgebras of symmetries and adjoint-symmetries; this correspondence holds for dissipative PDEs with no local variational structure.
The lie bracket that exists on adjoint-symmetries is also found to give a bracket structure to conservation laws; this bracket is found to be a Poisson bracket for non-Hamiltonian systems.
The importance of these results resides in giving a more broad understanding of the basic algebraic structure of adjoint-symmetries and how they apply to pre-Hamiltonian operators, (Noether) pre-symplectic operators and symplectic 2-forms for general PDE systems.
One more important possible use of the results on this paper is to obtain new adjoint-symmetries via the symmetry actions; these actions of symmetries over adjoint-symmetries can give a new adjoint-symmetry and possibly a new multiplier.
This can give rise to new possible conservation laws from adjoint-symmetries that can be or not be a multiplier of the PDE system.
It is known that from a pair of known symmetries one can find a new symmetry from their Lie bracket; therefore, studying these structures for adjoint-symmetries can prove useful for finding new symmetries of a system in an easier way.
The first important result is the action of symmetries on adjoint-symmetries; to state this first we need the well-known fact that symmetries of any given PDE system form a Lie algebra via their commutators.
From the algebraic viewpoint, if
,
are symmetries, then it is the commutator defined by [
19]
The geometrical formulation is given by:
The set of symmetries for a system is known to be a linear space with a bilinear antisymmetric bracket defined by the commutator that obeys the Jacobi identity.
The bracket is called the Lie bracket of the symmetry vector fields. Symmetries have a natural action on the set of adjoint-symmetries.
The first symmetry action comes from the prolonged action for a symmetry
of the adjoint-symmetry determining Equation (
46).
Carrying out this prolongation, one obtains [
19]
This yields a linear mapping
that acts on the linear space of adjoint-symmetries.
The action (
190) geometrically represents the Lie derivative [
16] and gives a generalization for a known action of symmetries on the conservation law multipliers of the system.
The second symmetry action is derived from an adjoint relation between the determining Equations (
34) and (
46), giving the next expression [
19]
Hence,
is a total divergence in jet space; therefore, the set of functions
gives a conservation law multiplier. It is known that every multiplier is also an adjoint-symmetry; then, the following linear mapping exists.
which acts on the linear space of adjoint-symmetries.
The following results give a generalization of the results found in [
18]
Theorem 12. For any (regular) PDE system (3), there are two actions (190) and (192) of symmetries on the linear space of adjoint-symmetries. The second symmetry action (192) maps adjoint-symmetries into conservation law multipliers. The difference of the first and second actions yields the linear mapping The action (193) will be trivial when the adjoint-symmetry is a conservation law multiplier. Next, results on how the symmetry action acts on multipliers is found. The action of a symmetry vector field
on the multiplier equation
yields
This yields the action [
19]
Theorem 12 implies that this action goes from conservation law multipliers to adjoint-symmetries through the symmetry action (
190).
Next, the action of Lie point symmetries is studied; this is a symmetry action (
190) and can be obtained for Lie point symmetries.
A Lie point symmetry vector field has the form [
2,
89]
If exponentiated, the following canonical vector field is found
The symmetry determining Equation (
46) for Lie point symmetries can be expressed as
With this, the following proposition can be stated [
19].
Proposition 10. The first symmetry action (190) for a Lie point symmetry (196) on an adjoint-symmetry is given bywhere is the adjoint of . For the other two-symmetry actions (
192) and (
193), similar expressions are derived for the case of adjoint-symmetries that contain a first-order linear form and we obtain that
The adjoint-symmetry determining Equation (
46) implies
This leads to the following result [
19]
Proposition 11. For a Lie point symmetry (196), the second and third symmetry actions (192) and (193) on a first-order linear adjoint-symmetry (200) and (201) are given bywhere is the adjoint of One type of Lie symmetry that is common in a number of applications is translations and scalings .
The vector is the direction of translation; the scalars , represent the scaling weights.
The evolutionary form of these symmetries is given by [
19]
and
These symmetries acting on adjoint-symmetries are a consequence of Propositions 10 and 11.
Corollary 3. (i) Suppose and are translation invariant: and . Then, the three symmetry actions, respectively, consist of (ii) Suppose and are scaling homogeneous: and . Then, the three symmetry actions, respectively, consist of For both of these symmetries, the second and third symmetry actions here are considered only for first-order linear adjoint-symmetries.
The generalization for pre-symplectic and pre-Hamiltonian structures (Noether operators) from symmetry actions is developed next; the authors start with a useful general discussion to introduce important notions for the following results.
Let
define the linear spaces of symmetries and adjoint-symmetries for a given PDE system
. Let
define the linear space of multipliers; this is a subspace of the linear space of adjoint-symmetries.
Suppose the DPE system has the following extra structure
where
and
are linear differential operators in total derivatives with coefficients that are non-singular on the solution space
. Then, for any symmetry
,
shows that [
19]
is an adjoint-symmetry. When
is a multiplier, then
describes a pre-symplectic operator for the PDE system; that is,
gives a mapping from
into
. When
is an adjoint-symmetry but not a multiplier, then it represents a Noether operator [
87].
Now, a PDE system (
3) has the following extra structure
with
and
being linear differential operators in total derivatives whose coefficients are non-singular on
. Any adjoint-symmetry
[
19]
defines symmetry. Since
is a mapping from
into
, it represents a Hamiltonian operator for the PDE system [
87].
The next inverse when well defined defines a pre-Hamiltonian operator and the inverse also when well defined defines a Noether operator.
These definitions can be generalized further to linear operators in partial derivatives with respect to jet space; in the following remark, this result is stated [
19].
Remark 3. For to be a Hamiltonian structure, there must exist a non-degenerate integral pairing (modulo total derivatives) between symmetries and adjoint-symmetries such that is a Poisson bracket; namely, it must be skew-symmetric and satisfy the Jacobi identity. Similarly, for to be a symplectic structure, the analogous bilinear-form must be skew-symmetric and closed.
Any symmetry action
on
, where
is a linear operator which is also linear in
. The action
gives a dual linear operator [
19]
from
into
; this dual linear operator constitutes a generalized pre-symplectic (Noether) structure. The inverse
, defined modulo its kernel,
, represents a generalized pre-Hamiltonian (inverse Noether) structure when
; when this condition is not met, we obtain the same structure but restricted.
If now we take the results on Theorem 12, the following structures are obtained [
19].
Theorem 13. For a general PDE system (3), let be any fixed adjoint-symmetry. Then, a generalized Noether structure is given by the first symmetry action (190),a generalized pre-symplectic structure is given by the second symmetry action (192),and a Noether operator is given by the third symmetry action (193), The inverse of each structure (221) and (222) defines a generalized pre-Hamiltonian (inverse Noether) structure, while the inverse of the operator (223) defines a pre-Hamiltonian (inverse Noether) operator. For the last Noether operator (
223), if combined using the Fréchet derivative identity (
41) the following bilinear form is obtained [
19].
Proposition 12. Let be any fixed adjoint-symmetry such that the Noether operator (223) is non-trivial and let be the components of the vector in the Fréchet derivative identity (41). A bilinear form on the linear space of symmetries is defined bywhere Ω
is the domain of codimension 1 in , with denoting a unit formal one-form of Ω
and with denoting the volume element on Ω.
The next section of the paper studies the bracket structures for adjoint-symmetries; that is, using the commutator (
187) of symmetries the structure of the Lie bracket defined via this commutator on the linear space of adjoint-symmetries is further developed (
212).
This section of the paper asks the question whether there is any bilinear bracket on the linear space of adjoint-symmetries (
213).
This type of structure for symmetries is known to give a new symmetry from two symmetries on the bracket; therefore, if there is a structure of this type for adjoint-symmetries, the same method of finding new adjoint-symmetries is possible.
This bilinear bracket can also helps us find conservation laws from known adjoint-symmetries if there exists a projection into the linear space of multipliers; this type of bracket defines a Poisson bracket.
The paper shows that all the actions of symmetries on adjoint-symmetries have two different bilinear bracket structures defined on the linear space of adjoint-symmetries.
The first bracket is a Lie bracket obtained from the pull-back of the symmetry commutator (
187) when the inverse of the symmetry action on adjoint-symmetry is given.
This gives a homomorphism from the Lie algebra to the Lie algebra of adjoint-symmetries.
The second bracket is known to not use the commutator (
187) and instead uses a composed symmetry action of an inverse action to find a recursion operator on adjoint-symmetries.
These two brackets are constructed in terms of the dual linear operator (
220) that is associated with a symmetry action (
219). Properties of each of the three action brackets will be discussed.
To construct the first bracket, the authors operate in the following way [
19].
Proposition 13. Fix an adjoint-symmetry in and let be the dual linear operator (220) associated with a symmetry action on . If the kernel of is an ideal in , thenwill define a bilinear bracket in the linear space . We can express this bracket aswhere denotes the Fréchet derivative of . The symmetry actions (
190), (
192) and (
193) are used then to define a corresponding bracket (
225).
Via some special conditions, one can use a set of adjoint-symmetries to construct the bracket.
If the kernel of the set of adjoint-symmetries meets the requirement of being an ideal, then it describes a projective subspace in .
For the linear space
to be an ideal, this subalgebra must be preserved by the action of
given by (
225). The subalgebra condition [
19]
implies that
needs to be true for all pairs of symmetries
and
, such that
and
.
This condition is known to hold for all pairs of symmetries and establishes the following results [
19].
Lemma 7. For the first symmetry action (190), is a subalgebra in . To continue, consider the third symmetry action (193). Lemma 8. For the third symmetry action (193), is a subalgebra in iff the conditionholds for all symmetries and in Lemma 9. For the second symmetry action (192), is a subalgebra in iff the conditionholds for all symmetries and in This can be summarized as follows [
19].
Proposition 14. The adjoint-symmetry commutator bracket (225) associated with each of the symmetry actions (190), (192) and (193) is well defined on if and for the actions (192) and (193), if the respective conditions (228) and (229) hold when . These latter conditions are identically satisfied when Q is a conservation law multiplier for a PDE system with no differential identities Another condition for the bracket to be well defined is that the symmetry Lie algebra admits an extra structure of a direct sum decomposition as a linear space
such that this decomposition is independent of the choice of basis.
This is possible if the subspaces
and
are characterized in terms of their scaling weights [
19].
Proposition 15. Suppose contains a scaling symmetry (205). For each of the symmetry actions (190), (192) and (193), is a scaling homogeneous subspace in by taking to belong to a sum of scaling homogeneous subspaces with scaling weights that are different than that of . These results are generalized if is a direct sum of scaling homogeneous subspaces all with different scaling weights for all scaling homogeneous subspaces that are in .
Some basic properties of the general adjoint-symmetry bracket (
225) are as follows.
The bracket (
225) takes the same properties as the symmetry commutator bracket, that is, the Jacobi identity and antisymmetry; therefore, the following theorem can be stated [
19].
Theorem 14. The adjoint-symmetry commutator bracket (225) is a Lie bracket; namely it is antisymmetricand obeys the Jacobi identityHence, the linear subspace of adjoint-symmetries has a Lie algebra structure that is homeomorphic to the symmetry Lie algebra. If there exists an adjoint-symmetry such that where satisfies the conditions in either Proposition 14 or Proposition 15, then the whole space will be a Lie algebra. A more useful condition for the finite case is .
From here, the adjoint-symmetry commutators associated with symmetry subalgebras are presented; for this, the paper starts by replacing the linear subspace by , taking into account that is any Lie subalgebra in and where is chosen in such a manner that is empty.
This set is a projective subspace in .
The commutator bracket in Proposition 13 is modified as [
19].
Proposition 16. Given a Lie subalgebra is and a symmetry action on , fix an adjoint-symmetry in such that the kernel of restricted to is empty, where is the dual linear operator (220) of the symmetry action. Then, the commutator bracket (225) is well defined on the linear space and this structure is isomorphic to the Lie subalgebra . In particular, provides an isomorphism under which the commutator bracket (225) on is the pull-back of the Lie bracket on . The conditiongives the adjoint-symmetries that are compatible with respect to constructing this bracket. If the condition is not met for all adjoint-symmetries then there is no subspace in where this bracket gives a Lie algebra isomorphic to . An open problem is the classification of which Lie subalgebras in have a counterpart in .
Also non-commutator brackets for adjoint-symmetries coming from symmetry actions are studied; this section of the paper starts by listing the following properties, which the second bracket lacks [
19].
Proposition 17. Fix an adjoint-symmetry in and let be the dual linear operator (220) associated with a symmetry action on . If the kernel of satisfiesthen a bilinear bracket from into is defined by Condition (
234) can be ignored when a scaling symmetry (
205) is present in the symmetry Lie algebra [
19].
Proposition 18. Suppose contains a scaling symmetry (205). For any symmetry action, if is a scaling homogeneous subspace in , then the adjoint-symmetry bracket (235) is well defined on by taking to belong to a sum of scaling homogeneous subspaces. The bracket (
235) is non-symmetric. Its only general property is that
for all
in the linear subspace
.
Two worthwhile remarks can be made [
19].
Remark 4. (i) Bracket (235) can be viewed as arising from the property that is a recursion operator on adjoint-symmetries in . (ii) A symmetric version and a skew-symmetric version of bracket (235) can be defined by respectively symmetrizing and antisymmetrizing on the pairs and :and The way the two brackets (
225) and (
235) are defined involves the dual linear map
defined by a symmetry action (
219); the symmetry action that can be chosen is any of the three actions already defined given in Theorem 12.
For the second symmetry action (
192), the brackets obtained are defined on the linear (sub) space of multipliers that is composed of the range for this symmetry action, namely
.
These two brackets now define a bracket structure for the conservation laws of the PDE system; these brackets are also a generalization of the Poisson brackets on the conserved integrals associated.
If the adjoint-symmetry is a multiplier, the two brackets defined using are equal to the ones mentioned earlier.
As mentioned earlier, for the third bracket (
193), in the case that
is a multiplier the brackets for this case will be trivial.
Both brackets (
225) and (
235) are constructed in terms of
and its inverse.
can also be constructed using structure constants obtained with respect to any fixed basis of the two linear spaces
and
[
19].
Using this representation helps to find the pre-image of any given adjoint-symmetry.
These brackets then are an a posteriori structure on the linear space .
The two brackets (
225) and (
235) are local in jet space and thereby constitute an a priori structure.
This also applies to pre-symplectic and pre-Hamiltonian (Noether) structures shown in Theorem 13.
The last results in this paper are the theory already presented applied to evolution PDEs.
To present these results, first consider a system of evolution PDEs for
,
where
x represents the spatial independent variables, while t represents the time variable. The system can be written as
In the solution space (
239), the t-derivatives of
can be made to vanish.
This is proof that every evolution system satisfies Lemma 4; therefore, all the conditions assumed at the beginning of this review hold identically for evolution systems.
The determining Equation (
9) then takes the next form
for a set of functions
that do not contain any derivatives of t
. The first term can therefore be written as [
19]
This is the symmetry determining equation in a simplified form. From here, the following result is obtained
The determining Equation (
41) for adjoint-symmetries can be simplified as [
19]
The following equation gives a relationship between adjoint-symmetries and symmetries.
using the anti-commutator.
From work already conducted, we know that the necessary and sufficient condition for an adjoint-symmetry to be a conservation law multiplier is that the Fréchet derivative is self-adjoint [
2,
21,
24,
87,
89,
90].
This condition, as pointed out in [
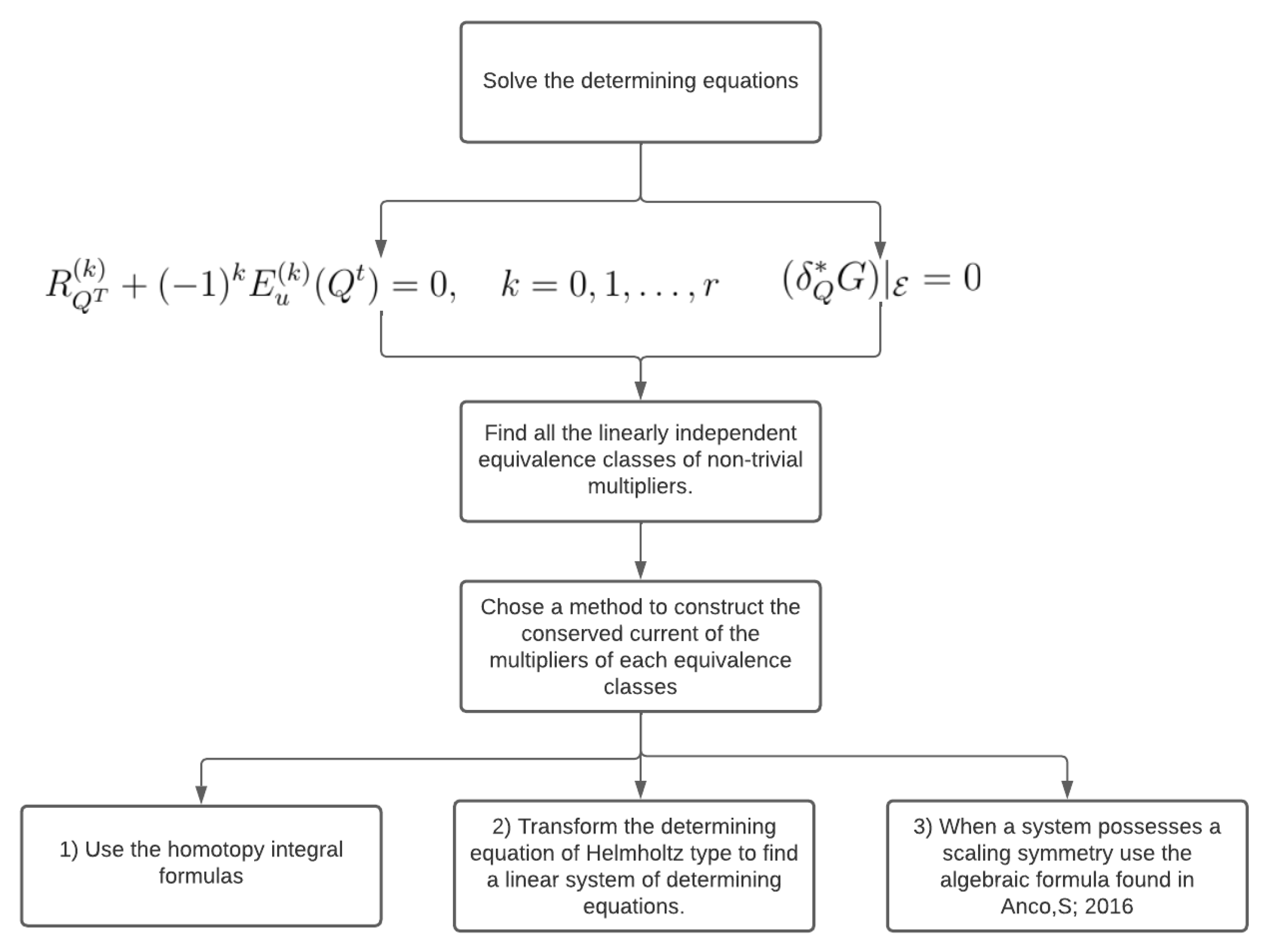
21], can be rewritten as the following system of Helmholtz equations
The determining system then consists of (
243) and (
247).
Self-adjointness (
246) is necessary and sufficient for
to be a variational derivative
Then, the symmetry action in Theorem 12 can be simplified using the last results yielding [
19].
Theorem 15. The actions (219) and (193) of symmetries on the linear space of adjoint-symmetries are, respectively, given bywhich coincide if is a conservation law multiplier. Action (192), given by the difference of these actions, consists ofwhich vanishes if is a multiplier. The dual linear map for this system is given by any of these three symmetry actions already defined.
As seen earlier, the commutator bracket defined when
satisfies either Proposition (15) or (14). The first propositions can be rewritten in terms of Q and a pair of symmetries
, and the next condition is obtained [
19]
for the second condition (
229) takes the form [
19]
for all symmetries
and
in
when dim
. When Q is a conservation law multiplier, these conditions are satisfied and
.
These adjoint-symmetry brackets do not need a variational principle underlying the PDE system.
From the third action (
223), it is found that [
19]
which is the Noether operator of Theorem 13 specialized to evolution PDEs through relation (
244). This operator will be non-trivial iff the multiplier Q describes a non-variational adjoint-symmetry.
From Proposition 12, we found an integral bilinear form (
224) on the linear space of symmetries
. For the case of evolution equations, the integral domain
changes to the spatial domain
; from this, the following bilinear integral form is derived [
19]
This is a two-form inner space of symmetries. We also have the closure condition
that can be formulated as [
19]
where all functions
must meet this condition.
The next theorem can be stated using these results [
19]
Theorem 16. For any evolution system (239), the two-form (255) is symplectic. Hence, when an evolution system has a non-variational adjoint-symmetry, the system has a non-trivial symplectic structure. This result can be generalized giving the next relation [
19]
which holds for all symmetries
.
The inverse of the Noether operator (
254) gives a pre-Hamiltonian operator that maps adjoint-symmetries to symmetries. This result also gives the following Poisson bracket [
19]
for functionals
where
is the variational derivative; namely
[
19].
Proposition 19. For any non-variational adjoint-symmetry , bracket (258) given by the Noether operator (254) is skewed and obeys the Jacobi identity as a consequence of being symplectic. Next, work can be carried out to find the conditions on or to obtain a Hamiltonian structure.
To conclude this section of the paper, every result will be briefly addressed in this last part.
First, three linear actions of symmetries on adjoint-symmetries were derived, that is, .
This gives a new generalization for a known action of symmetries acting over conservation law multipliers, .
The second action is found from another known formula that gives a conservation law multiplier, , obtained from a pair of symmetries in and an adjoint-symmetry in . This formula describes an action .
A third action
will only be non-trivial if the adjoint-symmetries used are not multipliers of the system [
19].
For all these actions, two different bilinear brackets for adjoint-symmetries were found; this was obtained using the dual linear action for a fixed adjoint-symmetry.
The first bracket derived is a Lie bracket, the second bracket does not involve the commutator structure of symmetries and is non-symmetric.
When some conditions are met in , the brackets are well defined on the entire space of adjoint-symmetries, .
The third symmetry gives a Noether (pre-symplectic) operator when a PDE system has an adjoint-symmetry that is not a multiplier.
For evolution PDEs, the same Noether operator describes an associated two-form which also defines a Poisson bracket structure.
For the Hamiltonian systems, the Poisson brackets yield a Hamiltonian operator.
In general, the adjoint-symmetry brackets give a relationship between symmetries and adjoint-symmetries when the system does not have a variational structure.
The adjoint-symmetry commutator gives a homomorphism of a Lie (sub) algebra of symmetries into a Lie algebra of adjoint-symmetries.
For this new result, there is no actual work carried out in other references but only some articles point out that the results developed here will be used.
Specifically, article [
91] proposes a new three-dimensional Lie algebra; from this algebra some well-known equations are obtained and it is found that this Lie algebra possesses a Hamiltonian structure.
The authors of this paper at the end propose that they will work to investigate the symmetries and the Lie algebras of the equations obtained; this work is thought to be done using the results of this paper.
We think this could be done by analyzing what properties are met for the Hamiltonian structure found in the paper; from this analysis, we expect that a lot of information about the symmetries, adjoint-symmetries and therefore conservation laws of the system could be derived.
Maybe also by finding this information some other non-expected structures could be found for this Lie algebra, but this classification work is still pending.
For more details on the actual status of this line of research, we again encourage the reader to see the article [
91].







{kind=link}
{kind=link}