
Bifurcations of Phase Portraits, Exact Solutions and Conservation Laws of the Generalized Gerdjikov–Ivanov Model



Abstract
:1. Introduction
2. Nonlinear Ordinary Differential Equation Corresponding to Equation (1)
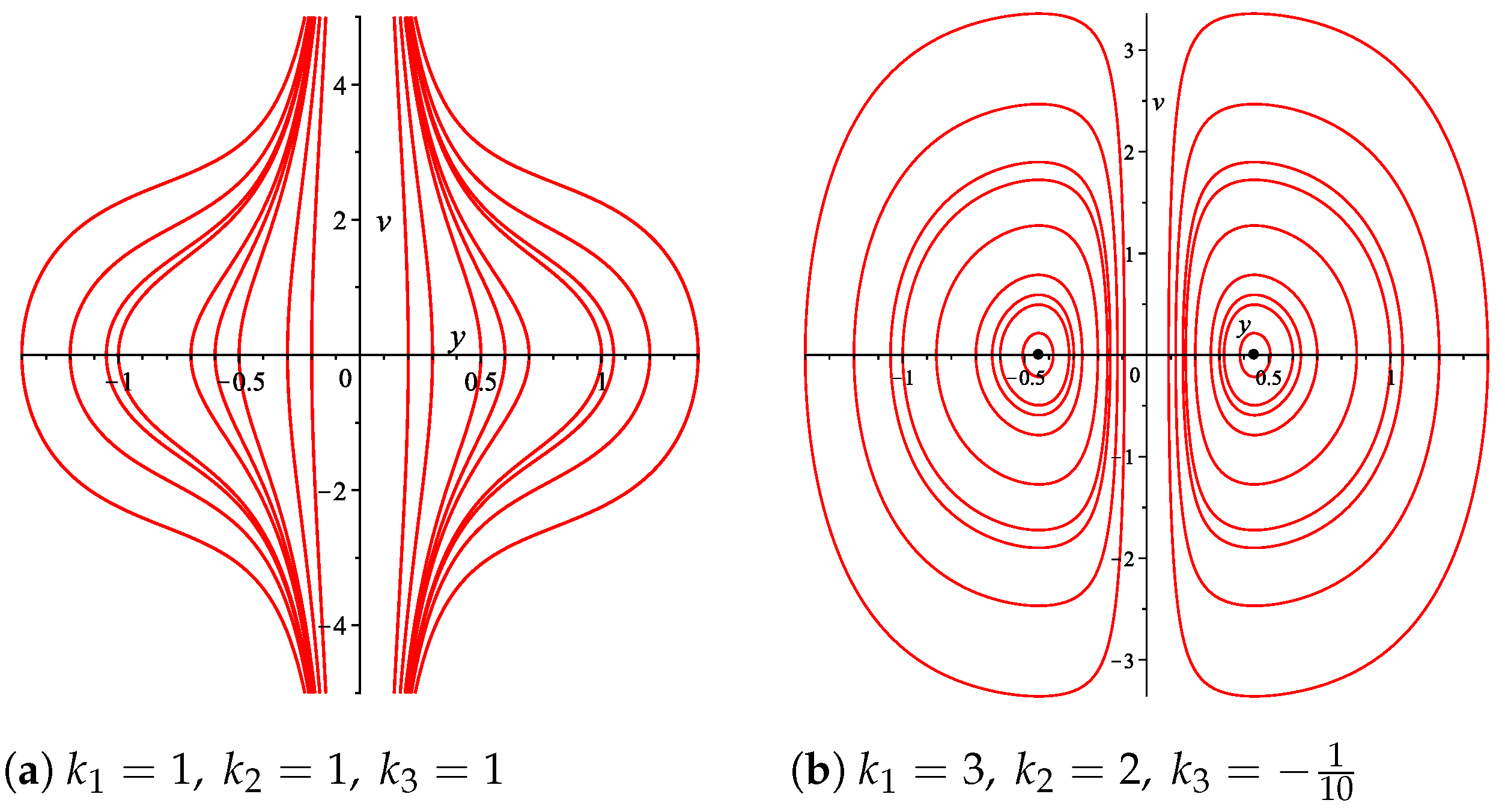
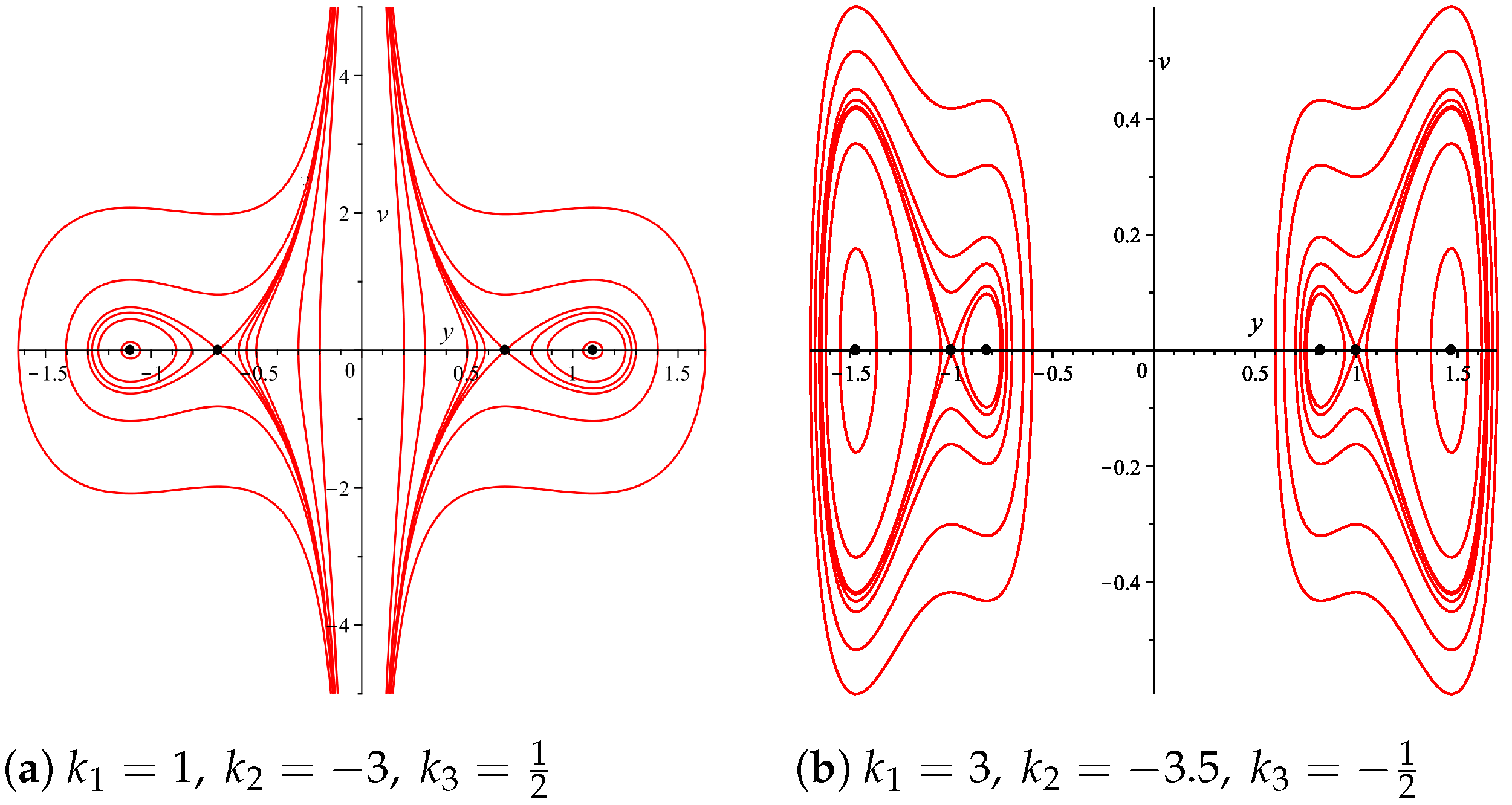
3. Bifurcation of Phase Portraits Corresponding to Equation (6)
- —an impossible case.
- —an impossible case.
- . Two zero roots and two roots that are real if .
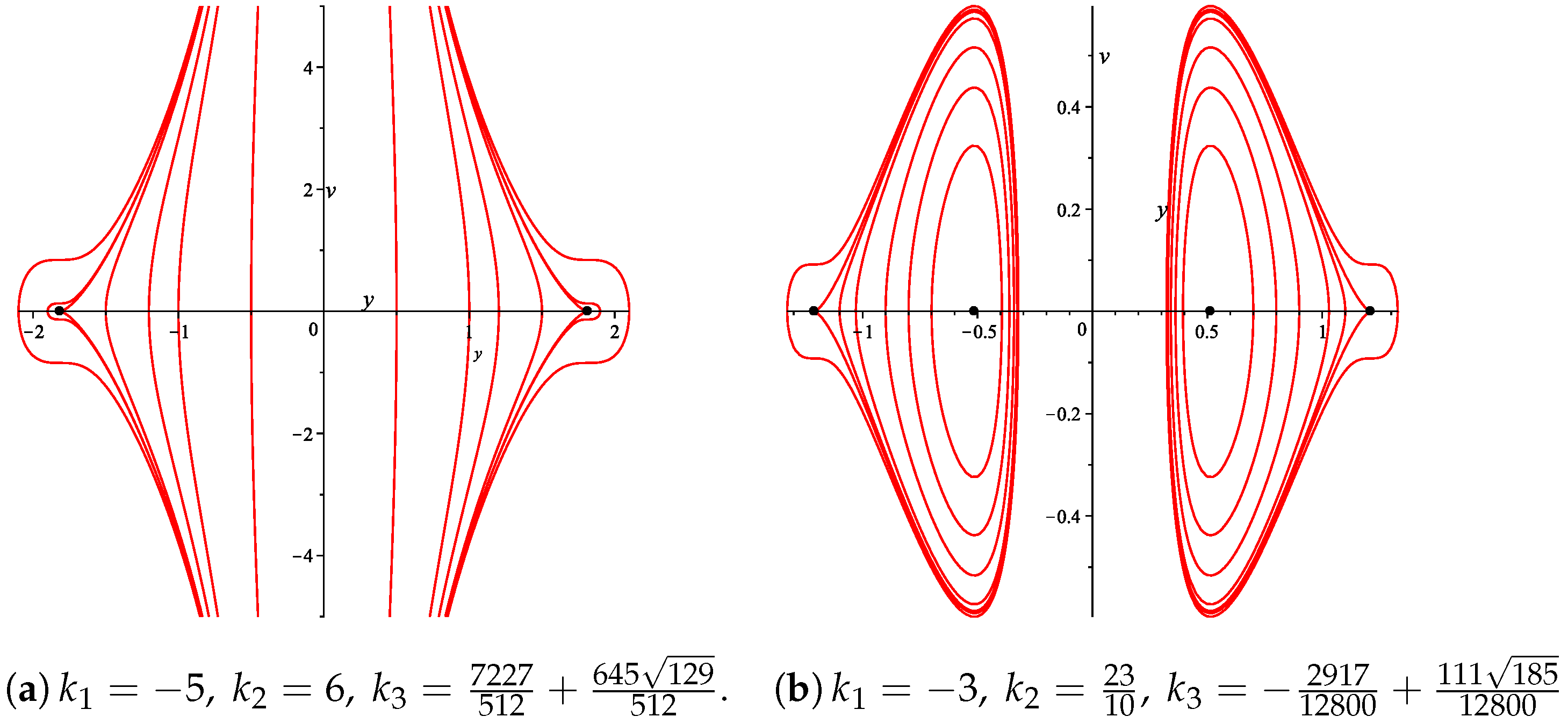
- and . At the root of Equation (16), has a zero derivative; therefore, the equilibrium points are degenerate provided that . There may exist one additional positive root of (16) depending on the parameter values, making it either two equilibria (Figure 4a) or four equilibria for system (10) (Figure 4b).
4. Periodic and Solitary Waves of Equation (1) at
5. General Solution of Equation (6) at
6. Exact Solutions of Equation (1) at an Arbitrary
7. Conservation Laws Corresponding to Equation (1)
8. Conservation Quantities
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gerdjikov, V.S.; Ivanov, M.I. Expansions over the squared solutions and inhomgeneous nonlinear Schrodinger equation. Inverse Probl. 1992, 8, 831–847. [Google Scholar] [CrossRef]
- Zahran, E.H.M.; Bekir, A. New unexpected explicit optical soliton solutions to the perturbed Gerdjikov-Ivanov equation. J. Opt. 2023, 52, 1142–1147. [Google Scholar] [CrossRef]
- Farahat, S.E.; Shazly, E.E.; El-Kalla, I.L.; Kader, A.A. Bright, dark and kink exact soliton solutions for perturbed Gerdjikov-Ivanov equation with full nonlinearity. Optik 2023, 277, 170688. [Google Scholar] [CrossRef]
- Onder, I.L.; Secer, A.; Ozisik, M.; Bayram, M. Investigation of optical soliton solutions for the perturbed Gerdjikov-Ivanov equation with full-nonlinearity. Heliyon 2023, 9, 2. [Google Scholar] [CrossRef] [PubMed]
- Ali, K.K.; Tarla, S.; Sulaiman, T.A.; Yilmazer, R. Optical solitons to the Perturbed Gerdjikov-Ivanov equation with quantic nonlinearity. Opt. Quant. Electron. 2023, 55, 2. [Google Scholar] [CrossRef]
- Tang, M.Y. Exact chirped solutions of the perturbed Gerdjikov-Ivanov equation with spatio-temporal dispersion. Zeitschrift für Naturforschung A 2023, 78, 8. [Google Scholar] [CrossRef]
- Younis, M.; Bilal, M.; Rehman, S.U.; Seadawy, A.R.; Rizvi, S.T.R. Perturbed optical solitons with conformable time-space fractional Gerdjikov-Ivanov equation. Math. Sci. 2022, 16, 431–443. [Google Scholar] [CrossRef]
- Yang, D. New solitons and bifurcations for the generalized Gerdjikov-Ivanov equation in nonlinear fiber optics. Optik 2022, 264, 169394. [Google Scholar] [CrossRef]
- Yidirim, Y.; Biswas, A.; Alshehri, H.M.; Belic, M.R. Cubic-quartic optical soliton perturbation with Gerdjikov-Ivanov equation by sine-Gordon equation approach. Optoelectron. Adv. Mat. 2022, 16, 236–242. [Google Scholar]
- Al-Kalbani, K.K.; Al-Ghafri, K.S.; Krishnan, E.V.; Biswas, A. Solitons and modulation instability of the perturbed Gerdjikov-Ivanov equation with spatio-temporal dispersion. Chaos Soliton Fract. 2021, 153, 111523. [Google Scholar] [CrossRef]
- Lu, P.H.; Wang, Y.Y.; Dai, C.Q. Abundant fractional soliton solutions of a space-time fractional perturbed Gerdjikov-Ivanov equation by a fractional mapping method. Chin. J. Phys. 2021, 74, 96–105. [Google Scholar] [CrossRef]
- Xiao, X.; Yin, Z. Exact single travelling wave solutions to the fractional perturbed Gerdjikov-Ivanov equation in nonlinear optics. Mod. Phys. Lett. B 2021, 35, 22. [Google Scholar] [CrossRef]
- Muniyappan, A.; Monisha, P.; Nivetha, V. Generation of wing-shaped dark soliton for perturbed Gerdjikov-Ivanov equation in optical fibre. Optik 2021, 230, 166328. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Traveling wave solutions of the generalized Gerdjikov-Ivanov equation. Optik 2020, 219, 165193. [Google Scholar] [CrossRef]
- Li, C.; Li, G.; Chen, L. Fractional optical solitons of the space-time perturbed fractional Gerdjikov-Ivanov equation. Optik 2020, 224, 165638. [Google Scholar] [CrossRef]
- Hosseini, K.; Mirzazadeh, M.; Ilie, M.; Radmehr, S. Dynamics of optical solitons in the perturbed Gerdjikov-Ivanov equation. Optik 2020, 206, 164350. [Google Scholar] [CrossRef]
- Guo, L.; Zhang, Y.; Xu, S.; Wu, Z.; He, J. The higher order rogue wave solutions of the Gerdjikov-Ivanov equation. Phys. Scr. 2014, 89, 035501. [Google Scholar]
- Zhang, J.B.; Gongye, Y.Y.; Chen, S.T. Soliton solutions to the coupled Gerdjikov-Ivanov equation with rogue-wave-like phenomena. Chin. Phys. Lett. 2017, 34, 090201. [Google Scholar] [CrossRef]
- He, B.; Meng, Q. Bifurcations and new exact travelling wave solutions for the Ggerdjikov-Ivanov equation. Commun. Nonlinear. Sci. 2010, 15, 1783–1790. [Google Scholar] [CrossRef]
- Biswas, A.; Yildirim, Y.; Yaşar, E.; Babatin, M. Conservation laws for Gerdjikov-Ivanov equation in nonlinear fiber optics and pcf. Optik 2017, 148, 209–214. [Google Scholar] [CrossRef]
- Biswas, A.; Ekici, M.L.; Sonmezoglu, A.; Triki, H.; Alshomrani, A.S.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical solitons for Gerdjikov-Ivanov model by extended trial equation scheme. Optik 2018, 157, 1241–1248. [Google Scholar] [CrossRef]
- Ding, C.C.; Gao, Y.T.; Li, L.Q. Breathers and rogue waves on the periodic background for the Gerdjikov-Ivanov equation for the alfvén waves in an astrophysical plasma. Chaos Soliton Fract. 2019, 120, 259–265. [Google Scholar] [CrossRef]
- Biswas, A.; Yildirim, Y.; Yasar, E.; Triki, H.; Alshomrani, A.S.; Ullah, M.Z.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical soliton perturbation with full nonlinearity for Gerdjikov-Ivanov equation by trial equation method. Optik 2018, 157, 1214–1218. [Google Scholar] [CrossRef]
- Biswas, A.; Yildirim, Y.; Yasar, E.; Triki, H.; Alshomrani, A.S.; Ullah, M.Z.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical soliton perturbation with Gerdjikov-Ivanov equation by modified simple equation method. Optik 2018, 157, 1235–1240. [Google Scholar] [CrossRef]
- Arshed, S.; Biswas, A.; Abdelaty, M.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical soliton perturbation for Gerdjikov-Ivanov equation by extended trial equation method. Optik 2018, 158, 747–752. [Google Scholar]
- Arshed, S.; Biswas, A.; Abdelaty, M.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical soliton perturbation for Gerdjikov-Ivanov equation via two analytical techniques. Chin. J. Phys. 2018, 56, 2879–2886. [Google Scholar] [CrossRef]
- Arshed, S. Two reliable techniques for the soliton solutions of perturbed Gerdjikov-Ivanov equation. Optik 2018, 164, 93–99. [Google Scholar] [CrossRef]
- Yildirim, Y. Optical solitons to Gerdjikov-Ivanov equation in birefringent fibers with trial equation integration architecture. Optik 2019, 182, 349–355. [Google Scholar] [CrossRef]
- Yildirim, Y. Optical solitons of Gerdjikov-Ivanov equation in birefringent fibers with modified simple equation scheme. Optik 2019, 182, 424–432. [Google Scholar] [CrossRef]
- Yildirim, Y. Optical solitons of Gerdjikov-Ivanov equation with four-wave mixing terms in birefringent fibers using trial equation scheme. Optik 2019, 182, 1163–1169. [Google Scholar] [CrossRef]
- Ismael, H.F.; Baskonus, H.M.; Bulut, H.; Gao, W. Instability modulation and novel optical soliton solutions to the Gerdjikov-Ivanov equation with M-fractional. Opt. Quantum Electron. 2023, 55, 303. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Lavrova, S.F. Painlevé Test, Phase Plane Analysis and Analytical Solutions of the Chavy–Waddy–Kolokolnikov Model for the Description of Bacterial Colonies. Mathematics 2023, 11, 3203. [Google Scholar] [CrossRef]
- Kudryashov, N.A. A generalized model for description of propagation pulses in optical fiber. Optik 2019, 189, 42–52. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Implicit solitary waves for one of the generalized nonlinear Schrödinger equations. Mathematics 2021, 9, 3024. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 2020, 206, 163550. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Nifontov, D.R. Conservation laws and Hamiltonians of the mathematical model with unrestricted dispersion and polynomial nonlinearity. Chaos Solitons Fract. 2023, 175, 114076. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kudryashov, N.A.; Lavrova, S.F.; Nifontov, D.R. Bifurcations of Phase Portraits, Exact Solutions and Conservation Laws of the Generalized Gerdjikov–Ivanov Model. Mathematics 2023, 11, 4760. https://doi.org/10.3390/math11234760
Kudryashov NA, Lavrova SF, Nifontov DR. Bifurcations of Phase Portraits, Exact Solutions and Conservation Laws of the Generalized Gerdjikov–Ivanov Model. Mathematics. 2023; 11(23):4760. https://doi.org/10.3390/math11234760
Chicago/Turabian StyleKudryashov, Nikolay A., Sofia F. Lavrova, and Daniil R. Nifontov. 2023. "Bifurcations of Phase Portraits, Exact Solutions and Conservation Laws of the Generalized Gerdjikov–Ivanov Model" Mathematics 11, no. 23: 4760. https://doi.org/10.3390/math11234760
APA StyleKudryashov, N. A., Lavrova, S. F., & Nifontov, D. R. (2023). Bifurcations of Phase Portraits, Exact Solutions and Conservation Laws of the Generalized Gerdjikov–Ivanov Model. Mathematics, 11(23), 4760. https://doi.org/10.3390/math11234760