

Index Matrix-Based Modeling and Simulation of Buck Converter



Abstract
:1. Introduction
2. Basic Definitions of Index Matrices with Real Number Elements
3. R-IM Models in Electronic Circuit Design
3.1. Models of Electronic Components
3.2. Models of Component Connections and Electronic Circuits
4. Model Solving
4.1. Common Notes
4.2. Model-Solving Algorithm
| Algorithm 1: Single simulation of device functioning | |
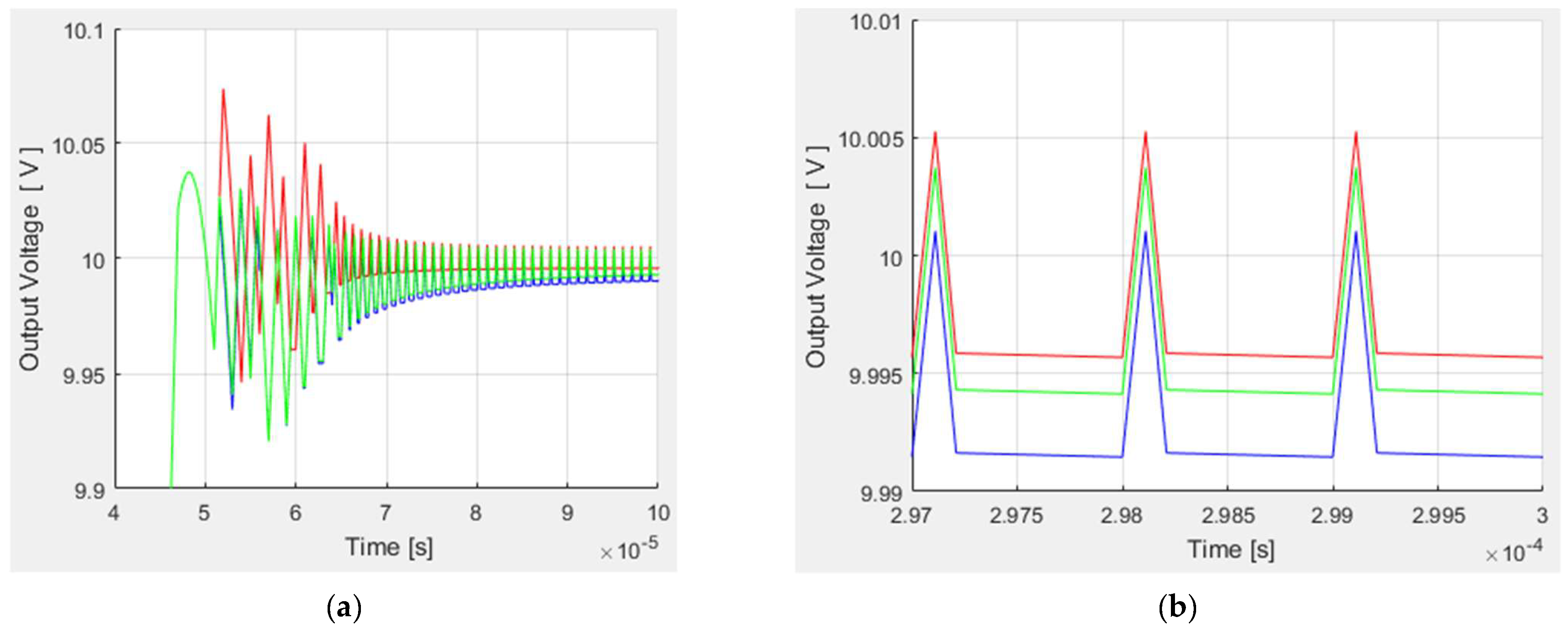
| Step 1: Specifying a time interval and a time step Let the functioning of the model be simulated in time set (18) with a proper initial time (for a convenience, it is set to zero below) and a proper time step . It is appropriate for the end model time to be used, too. The choice of determines a proper accuracy; Figure 2 shows the results of simulations depending on this choice (relative to a switching interval). Step 2: Initialization Initial values corresponding to index sets and must be set. In case of zero values of voltages and amperages at for the power components of the considered DC-DC converter, the following R-IM can be used: | |
| ; | (82) |
| Here, holds. Step 3: Specifying constant R-IMs Such R-IMs are calculated in advance and explored in the next steps. Four Variants of are described in (76)–(79). The following variants of index matrices from (73) can be presented: | |
| ; | (83) |
| and are variants of and respectively in case of | |
| (84) | |
| ( contains all indexes related to analog values which should be investigated except for those values which are related to ; the last ones are calculated separately). Two variants of are described in (60). The following variants of index matrix can be calculated in advance according to (60) and (81): | |
| (85) | |
| (86) | |
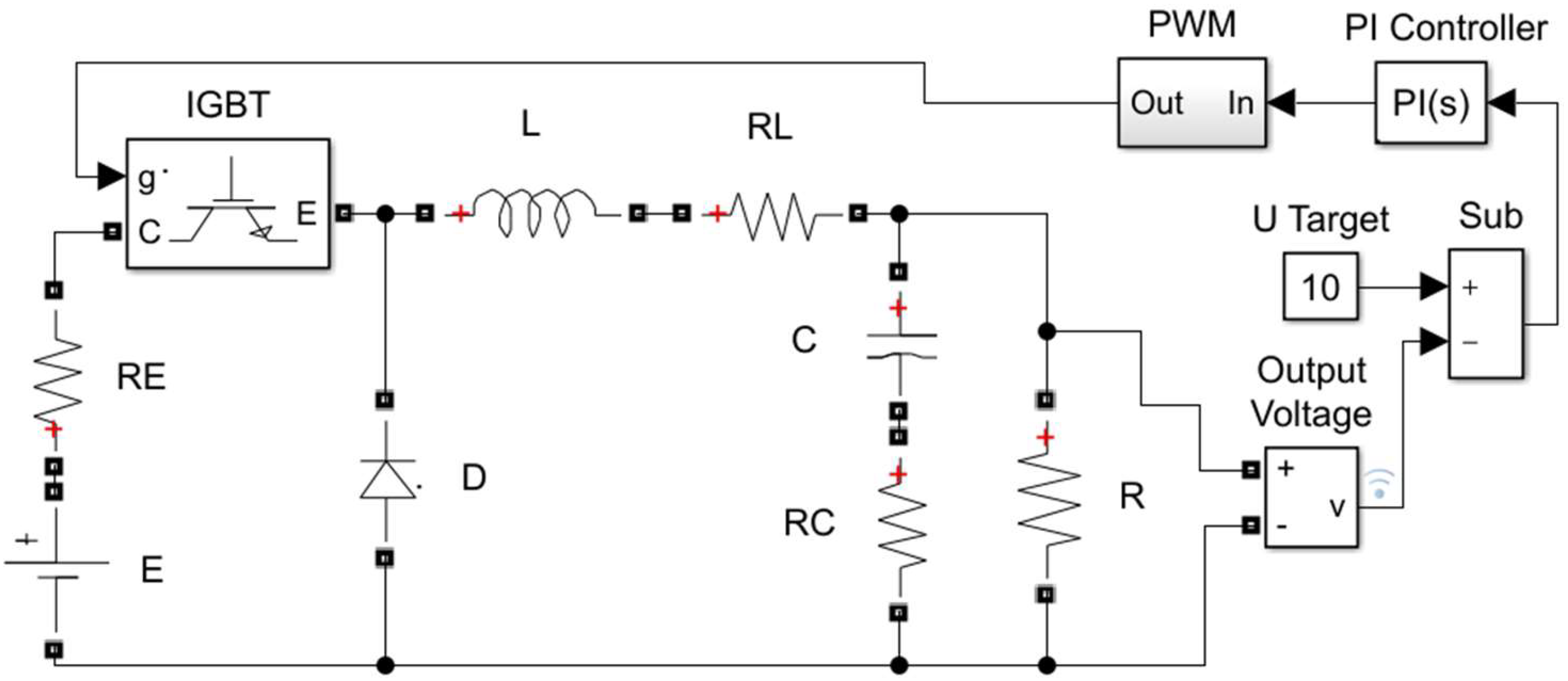
| (trivial equivalence holds). Step 4: Current time setting Add to current time t. Step 5: Calculation of digital values Generally, these values depend on analog and other digital values. All described analog values are continuous; small values of determine near their values, which can be used like replaceable ones. An interrelation between digital values has been described in (81). For the considered converter, the signal at the input of the presented PWM block is continuous, and for current time t is modeled by either or an earlier value (see (41), where sampling moment depends on triangular function (42)). The latter and determine in (60) and, therefore, all digital values through (85) or (86). Step 6: Calculation of analog values Analog values which concern time , as near to respective values for time t, have been used in the previous step. Oppositely, analog values at time t, which are related to conditions of other values (and, therefore, indexed in ), are used directly in this step in order for variants of to be chosen. For the considered converter, has three elements. For example, if for the analog values at time t, which are indexed in and estimated by | |
| , | (87) |
| the inequalities in (76) hold, then the following assignments must be implemented: | |
| , ; | (88) |
| See (83) and (84) for the upper notations (here, ). Similar statements can be presented according to (77)–(79). Since all considered analog values are continuous, only one of the cases (76)–(79) can be applied and are used in the following calculations. In case of : | |
| (89) | |
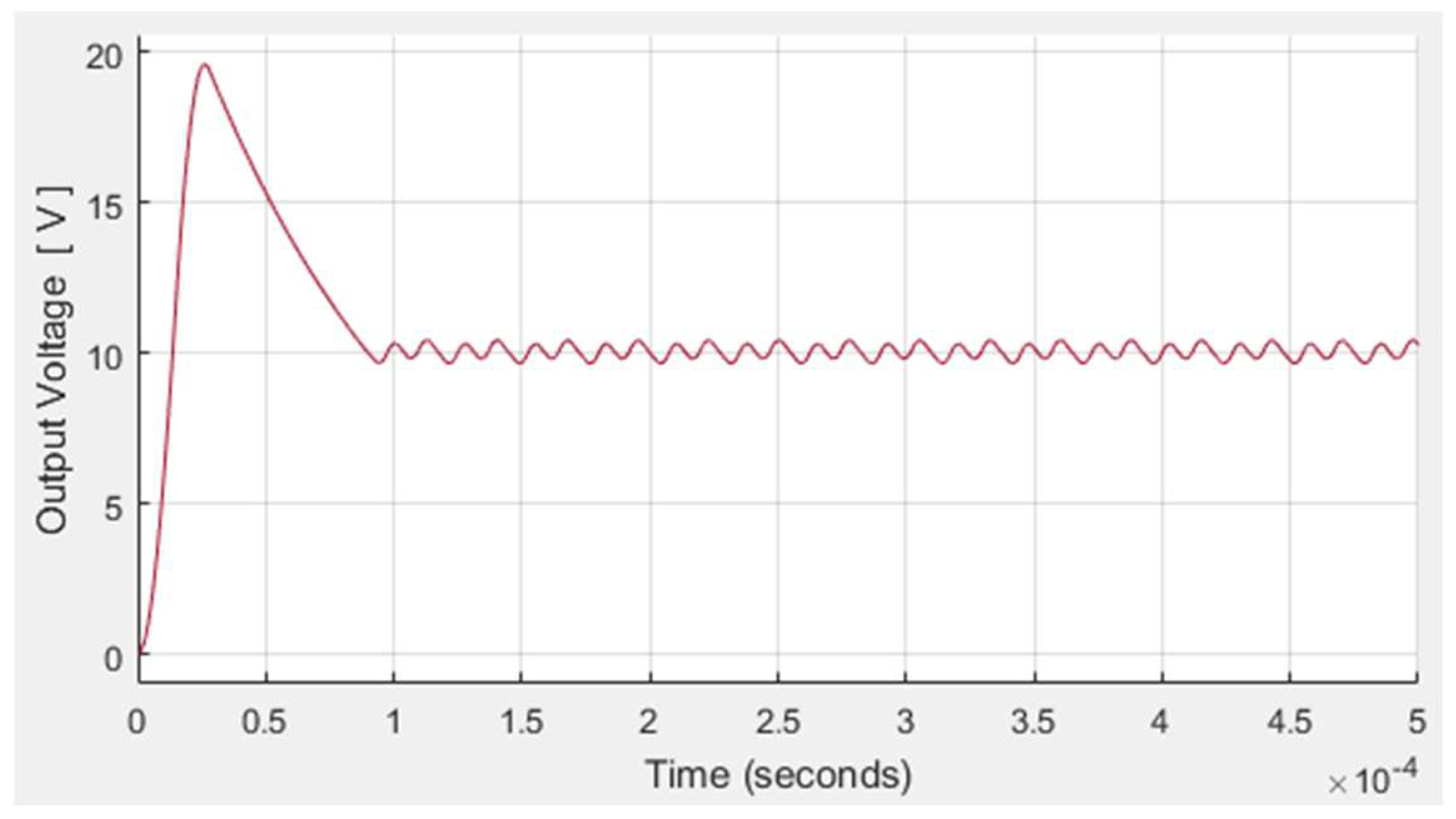
| Since the output voltage of the considered DC-DC buck converter with a PI controller can be investigated. In case of , all analog values can be investigated. On each iteration, elements of can be modified under constraints in (83) in order for proper sets of current voltages and amperages to be estimated. Step 7: Time check If holds, then Steps 4, 5 and 6 must be performed; otherwise, the algorithm must be terminated. | |
4.3. Single Simulation Results

5. Optimization
| Algorithm 2: Determining final parameter intervals at once | |
| Step 1: Specifying fixed parameters Let the input voltage, the target voltage, the output resistance, the switching frequency and the simulation duration be fixed through | |
| (98) | |
| (in this case, ), and let the additional parameters in (91) and (92) have the same constant values. Step 2: Specifying output voltage requirements For the described DC-DC converter, the following requirements are taken (see (94)–(96)): | |
| (99) | |
| Step 3: Specifying initial parameter intervals Let the parameters from (93) vary in order for minimal values of and to be obtained, and let their initial values be in the following ranges: | |
| (100) | |
| Step 4: Simulations with constant parameter intervals Simulations, which use random uniformly distributed values according to (100), must be implemented. They are performed until the number of “successful” ones (in this context, the requirements from (99)) is lower than . In the present paper, | |
| (101) | |
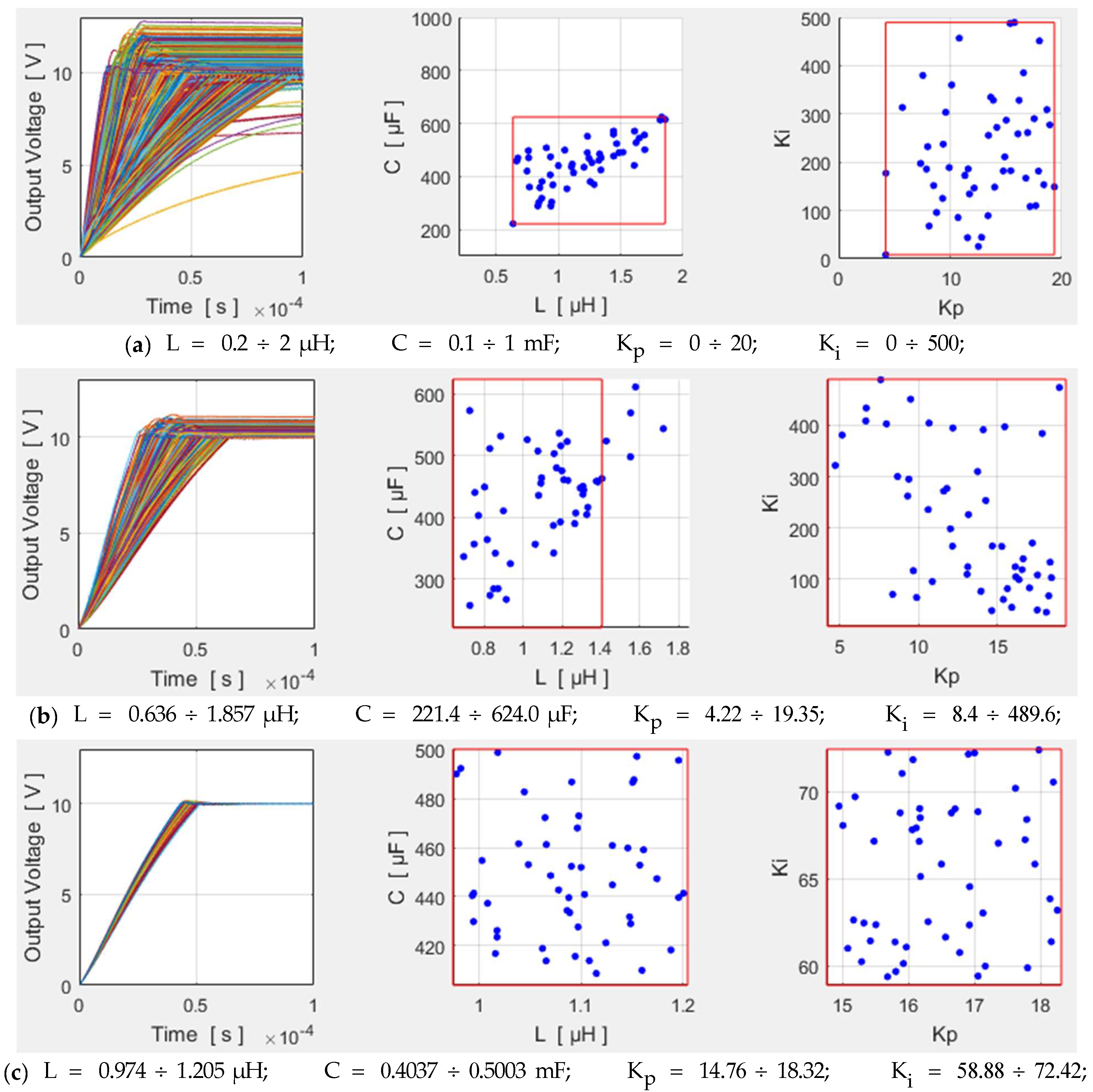
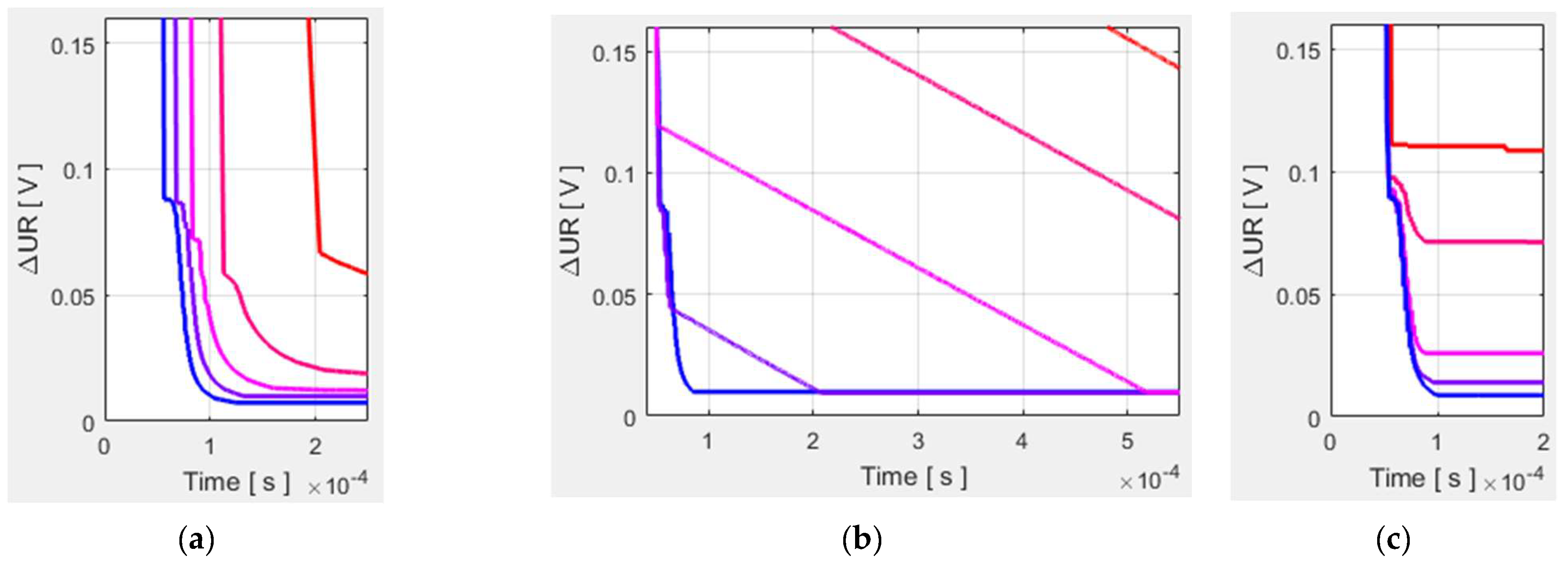
| (see Figure 3). In case of the initial intervals, the number of all simulations is 939 (the results are presented in Figure 3a). Nested parameter intervals have been used in this algorithm, and the number of simulations presented in Figure 3b is 214 (the number of “successful” ones is equal to too). The next respective numbers of simulations are 185, 178 and 113. The 23rd simulation has 50; i.e., it is equal to However, 38 variants of parameter intervals are used in order for 10% parameter tolerances to be obtained (see (108)–(110)). Distributions for “successful” simulations are presented in the second and third columns in Figure 3. Step 5: Determining nested intervals The following intervals can be defined: | |
| (102) | |
| The intervals are updated according to “successful” simulations only. Let | |
| (103) | |
| present the values of parameter in such simulations in an ordered manner. In case of the initial ranges, which are presented in (100) and Figure 3a, new intervals are formed by | |
| (104) | |
| They are shown with red lines in Figure 3a and are used in the next iteration (see the ranges of the parameters in Figure 3b). In case of the next (non-initial) intervals, a single element from is selected in order for the new interval to be set (the ranges of the other parameters remain the same). The percentage of values , which do not belong to , is denoted by . In the present consideration, is constant: | |
| (105) | |
| One of the endpoints of the respective parameter interval from the previous iteration is updated in . A pair containing an interval and a ratio is defined for each : | |
| (106) | |
| where denotes the integer part of x. Parameter is selected in order for the following equality to be satisfied: | |
| (107) | |
| Inequality is discussed in Step 6. is updated at the second iteration to (since of 50 is equal to 5, the parameter range is reduced on the base of the highest 5 values on induction—see the second graph on Figure 3b). Step 6: Termination check In practice, the parameters can be realized with given tolerances. In the present paper, | |
| (108) | |
| is the used tolerance for each parameter; it means that only ranges, which satisfy | |
| (109) | |
| Are applied. Otherwise, if inequality (109) does not hold for any new interval in Step 4, the algorithm is terminated. For the presented example, after the last allowed parameter changes, the ranges of the parameters (see Figure 3c) are | |
| (110) | |
| Algorithm 3: Optimizing final parameter intervals | |
| Step 1: Setting a number of simulation series and a current simulation series index A number of simulation series m in the present paper has been set by | |
| (111) | |
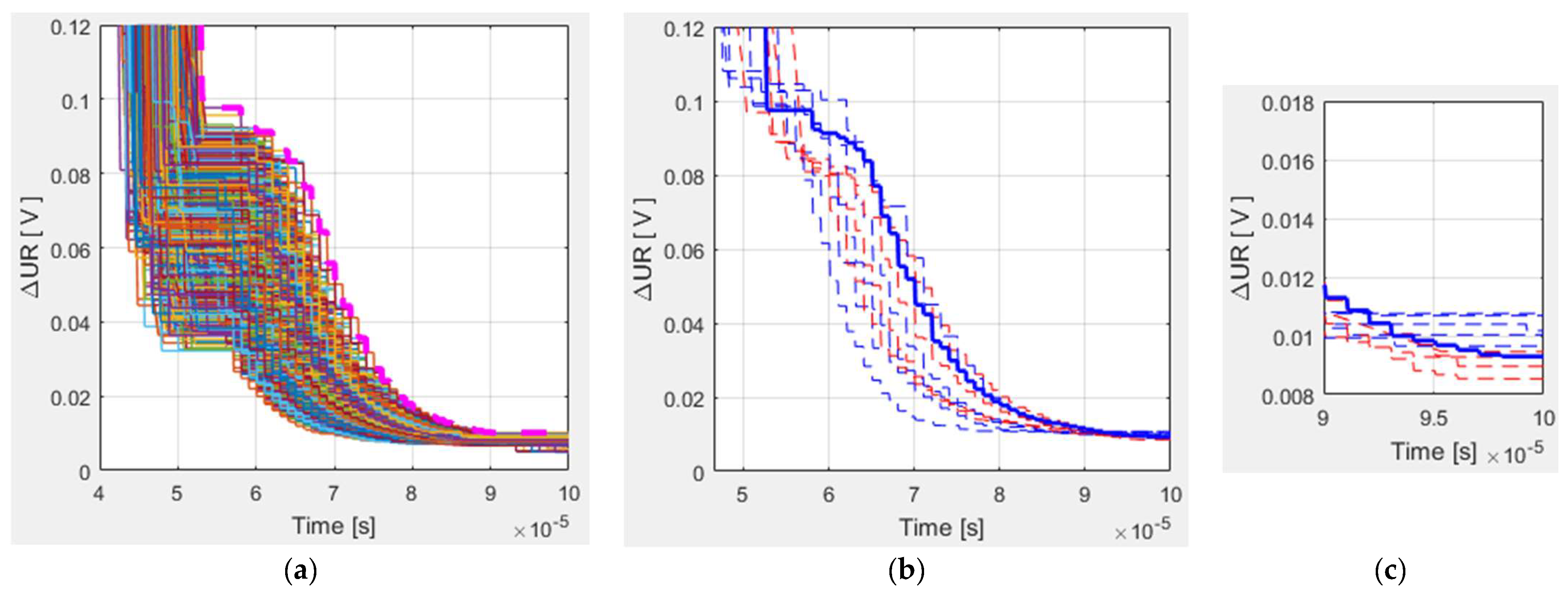
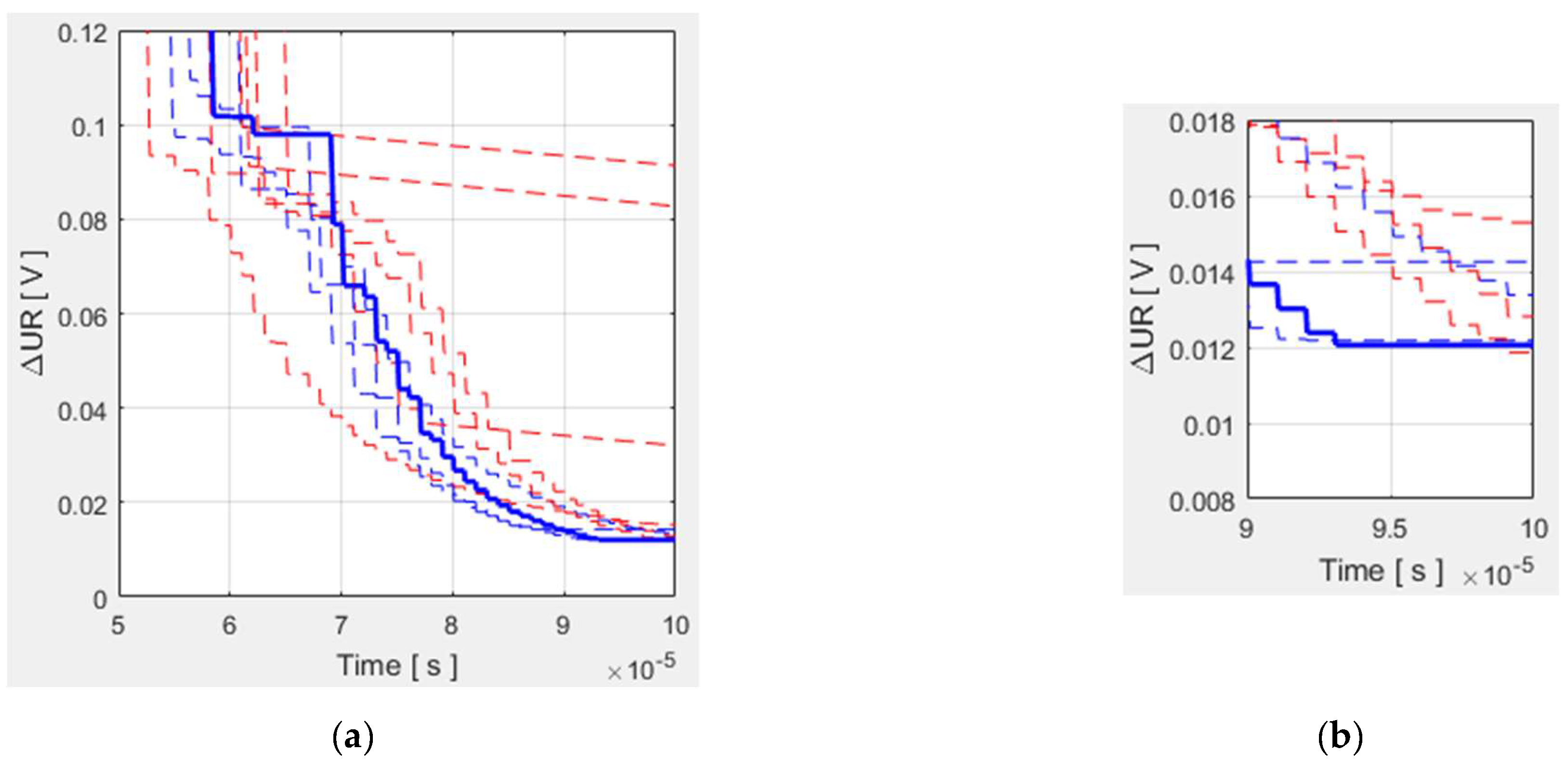
| in order for sufficiently distinguishable graphics to be obtained (see Figure 4b,c). The current simulation series index is initialized by | |
| (112) | |
| Step 2: Applying an algorithm with a fixed input voltage and a fixed output resistance Algorithm 2 must be applied. Step 3: Verifying results The final parameter intervals obtained in Step 2 through Algorithm 2 have been used here. Normal distributions based on the final parameter intervals (notation from (102) are used here) with means and standard deviations | |
| (113) | |
| respectively, must be constructed and applied. ensures 99.7% of the data within . Simulations with a fixed input voltage and a fixed output resistance are performed in order levels | |
| (114) | |
| under notation (96) to be obtained ( are separate simulations); in the present paper, | |
| (115) | |
| The magenta dotted line on Figure 4a presents the resulting curve from (114). Step 4: Increasing the current number of simulation series Increment the current simulation series index by 1. Step 5: A check on the current number of simulation series If holds, then Steps 2, 3 and 4 must be performed; otherwise, the execution of these steps must be terminated. Step 6: Choosing an optimal parameter intervals It is obvious that m simulation series have been performed in the previous steps. Different levels (114) have been obtained. Optimal final parameter intervals, which correspond to a proper | |
| (116) | |
| based on the simulation series with the lowest level | |
| (117) | |
| must be chosen; here | |
| (118) | |
| In the present paper | |
| (119) | |
| This process is shown in Figure 4b,c, where 10 lines (one continuous and nine dotted ones) present variants of the dotted curve from Figure 4a. The red ones represent simulations, for which the following statement holds: | |
| (120) | |
| The blue ones represent simulations, for which | |
| (121) | |
| and the line, which corresponds to the simulations with an optimal parameter intervals (see (117)), is continuous. Generally, the discussed example gives the following constraints: | |
| (122) | |
| in case of 10,000 simulations for normally distributed parameters from intervals with at least 10% tolerance for and . | |
6. Simulation Duration
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hinov, N.; Gocheva, P.; Gochev, V. Index Matrices—Based Software Implementation of Power Electronic Circuit Design. Electronics 2022, 11, 675. [Google Scholar] [CrossRef]
- Hinov, N.; Gocheva, P.; Gochev, V. Fuzzy Reasoning on Buck DC-DC Power Converter Parameters. Int. J. Inf. Technol. Secur. 2022, 14, 33–44. [Google Scholar]
- Mesarovic, M.; Takahara, Y. General Systems Theory: Mathematical Foundations; Elsevier Science: Amsterdam, The Netherlands, 1975; ISBN 978-0-080-95622-0. [Google Scholar]
- Gavin, H. Linear Time-Invariant Dynamical Systems, Duke University, NC, USA, CEE 629 System Identification. Available online: https://people.duke.edu/~hpgavin/SystemID/CourseNotes/LTI.pdf (accessed on 23 October 2023).
- Galor, O. Discrete Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-642-07185-0. [Google Scholar]
- Nise, N. Control Systems Engineering; John Wiley & Sons: Hoboken, NJ, USA, 1999; ISBN 978-1-118-17051-9. [Google Scholar]
- Blaabjerg, F. (Ed.) Control of Power Electronic Converters and Systems; Elsevier Inc.: Amsterdam, The Netherlands, 2021; Volume 3, ISBN 9780128194331. [Google Scholar]
- Sumukh, S.; Arjun, M. Mathematical Modeling of Power Electronic Converters. SN Comput. Sci. 2021, 2, 267. [Google Scholar] [CrossRef]
- Gocheva, P.; Hinov, N.; Gochev, V. Matrix Based Estimation of Current and Voltage Magnitude in Electronic Circuits. In Proceedings of the 44th International Conference on Applications of Mathematics in Engineering and Economics: (AMEE’18), Sozopol, Bulgaria, 8–13 June 2018; p. 060026. [Google Scholar] [CrossRef]
- Power Electronics Simulation. Design Digital Controllers for Power Electronics Using Simulation. Available online: https://www.mathworks.com/solutions/electrification/power-electronics-simulation.html (accessed on 23 October 2023).
- Godoy, S.; Farret, F. Modeling Power Electronics and Interfacing Energy Conversion Systems; Wiley-IEEE Press: Hoboken, NJ, USA, 2016; ISBN 978-1-119-05847-2. [Google Scholar]
- Trzynadlowski, A.M. Introduction to Modern Power Electronics; John Wiley & Sons: Hoboken, NJ, USA, 2016; ISBN 978-1-119-00321-2/1119003210. [Google Scholar]
- Atanassov, K. Index Matrices: Towards an augmented matrix calculus. In Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2014; Volume 573, ISBN 978-3-319-10945-9. [Google Scholar]
- Traneva, V.; Tranev, S. Index Matrices as a Tool for Managerial Decision Making; Publishing House of the Union of Scientists: Sofia, Bulgaria, 2017; ISBN 978-9543-97041-4. (In Bulgarian) [Google Scholar]
- Atanassov, K. Generalized Nets; World Scientific: Singapore, 1991; ISBN 978-981-02-0598-0. [Google Scholar]
- Atanassov, K. On Generalized Nets Theory; “Prof. Marin Drinov” Academic Publising House: Sofia, Bulgaria, 2007; ISBN 978-954-322-237-7. [Google Scholar]
- Fan, M.; Zhang, Z.; Wang, C. Mathematical Models and Algorithms for Power System Optimization; Elsevier Inc.: Amsterdam, The Netherlands, 2019; ISBN 978-0-12-813231-9. [Google Scholar] [CrossRef]
- Delhommais, M. Review of optimization methods for the design of power electronics systems. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. 1–10. [Google Scholar] [CrossRef]
- MATLAB. The Language of Technical Computing. Available online: https://ch.mathworks.com/help/matlab/index.html?s_tid=hc_panel (accessed on 23 October 2023).
- Basic Calculation of a Buck Converter’s Power Stage. Application Report SLVA477B, Texas Instruments, December 2011–Revised August 2015. Available online: https://www.ti.com/lit/an/slva477b/slva477b.pdf (accessed on 18 November 2023).
- Astrom, K.J.; Hagglund, T. PID Controllers: Theory, Design, and Tuning, 2nd ed.; Instrument Society of America: Triangle Park, NC, USA, 1995; Available online: https://aiecp.files.wordpress.com/2012/07/1-0-1-k-j-astrom-pid-controllers-theory-design-and-tuning-2ed.pdf (accessed on 18 November 2023).
- Principles of PID Controllers. Zurich Instruments, July 2023. Available online: https://www.zhinst.com/ch/en/resources/principles-of-pid-controllers (accessed on 18 November 2023).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Time Duration (ms) | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 |
|---|---|---|---|---|---|
| Runtime in Simulink (ms) | 622 | 728 | 848 | 943 | 1042 |
| Runtime in the authors’ .NET software (ms) | 18.6 | 23.3 | 27.7 | 33.1 | 37.5 |
| Runtime in the authors’ MATLAB software (ms) | 2.7 | 6.4 | 9.8 | 12.8 | 16.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hinov, N.; Gocheva, P.; Gochev, V. Index Matrix-Based Modeling and Simulation of Buck Converter. Mathematics 2023, 11, 4756. https://doi.org/10.3390/math11234756
Hinov N, Gocheva P, Gochev V. Index Matrix-Based Modeling and Simulation of Buck Converter. Mathematics. 2023; 11(23):4756. https://doi.org/10.3390/math11234756
Chicago/Turabian StyleHinov, Nikolay, Polya Gocheva, and Valeri Gochev. 2023. "Index Matrix-Based Modeling and Simulation of Buck Converter" Mathematics 11, no. 23: 4756. https://doi.org/10.3390/math11234756
APA StyleHinov, N., Gocheva, P., & Gochev, V. (2023). Index Matrix-Based Modeling and Simulation of Buck Converter. Mathematics, 11(23), 4756. https://doi.org/10.3390/math11234756