
Control the Coefficient of a Differential Equation as an Inverse Problem in Time

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
- If then the solution contains trigonometric and linear functions.
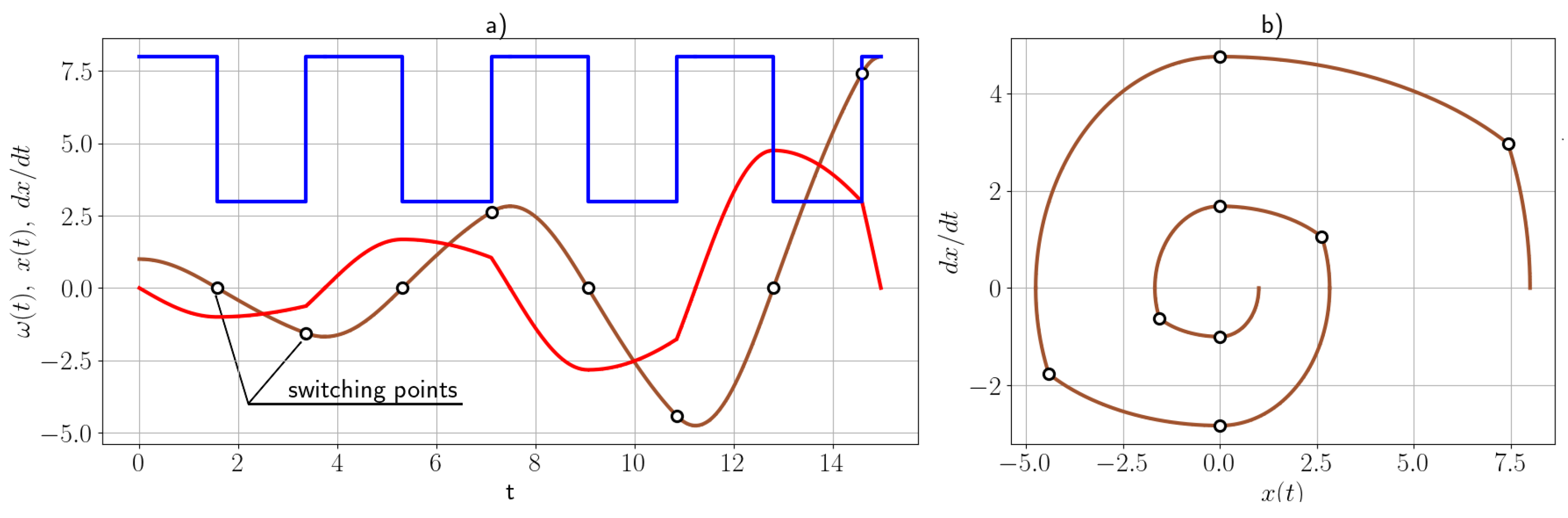
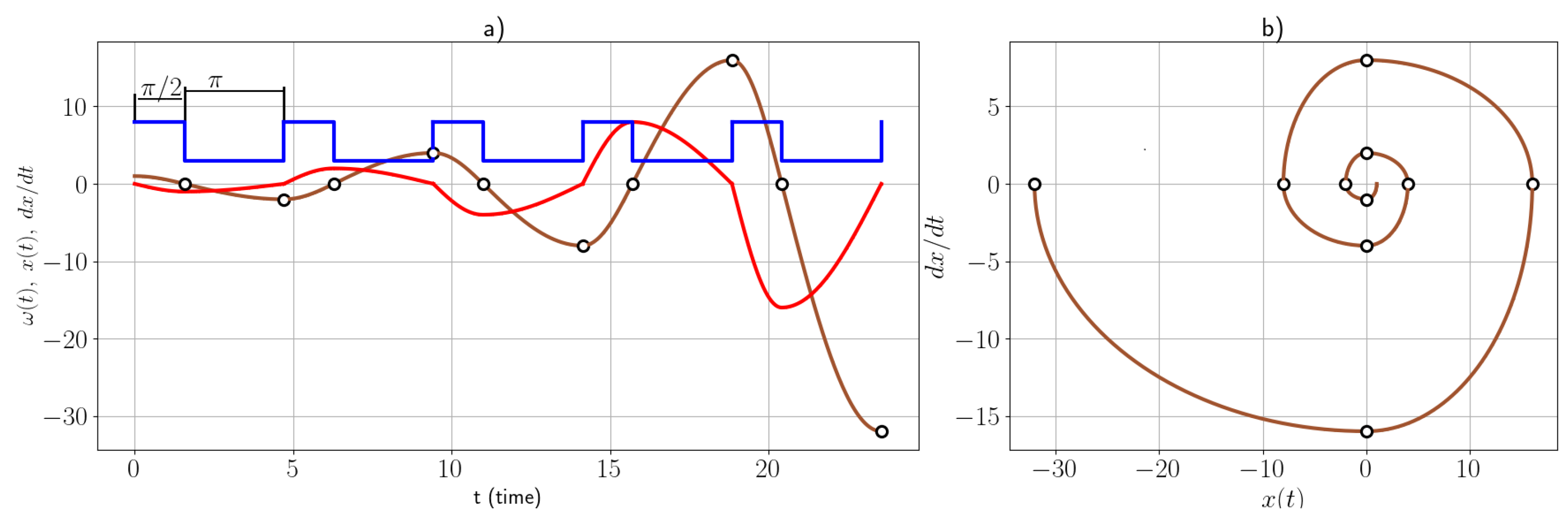
- The coefficient is limited and greater than zero (), and the solution may oscillate, with the amplitude of oscillations increasing or decreasing over time.
3. Analysis with
3.1. Different Sign Values at the Boundary
3.2. Proof of Optimality
3.3. Identical Sign Values at the Boundary
- For any there exists such that and
- For any there exists such that and
- For any there exists such that and
- For any there exists such that and
4. Problem with
Construction of an Analytical Solution When
- 1.
- If then the following cases of the optimal process are possible:
- (a)
- or ;
- (b)
- ;
- (c)
- If then the solution oscillates with a number of switches.
- 2.
- If then the following applies:
- (a)
- or ;
- (b)
- ;
- (c)
- If then the solution oscillates with a number of switches.
- If then The solution is and and then the function is uniquely determined:
- If then, similarly to the previous case, we obtain that the function is determined as follows: and
- If then the function is determined as follows:In this case, the function will be equal to and Taking into account the minimum we find that and is determined unambiguously.
5. Construction of the Optimal Solution
6. Proof of Optimality and Final Solution
7. General Case
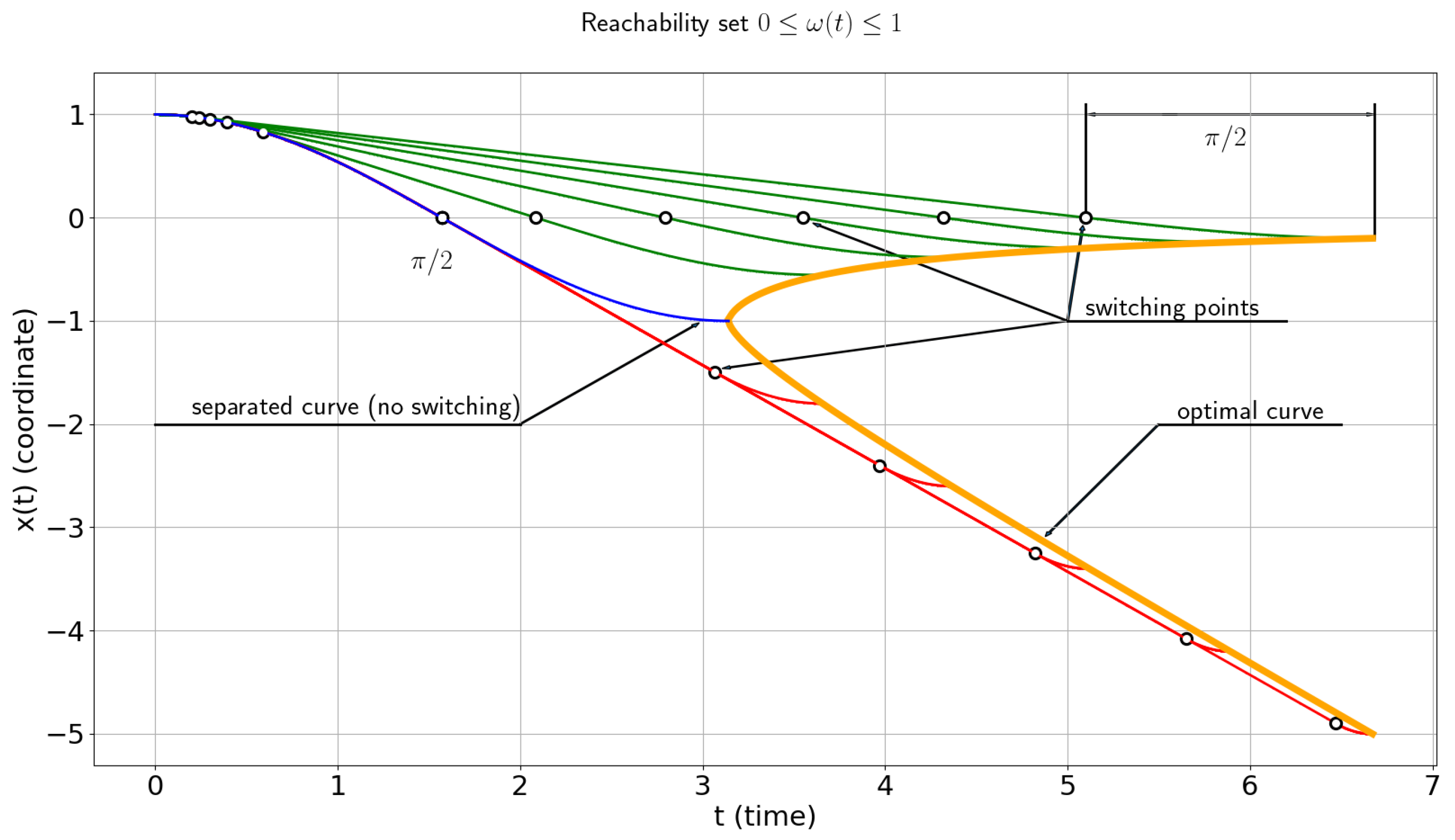
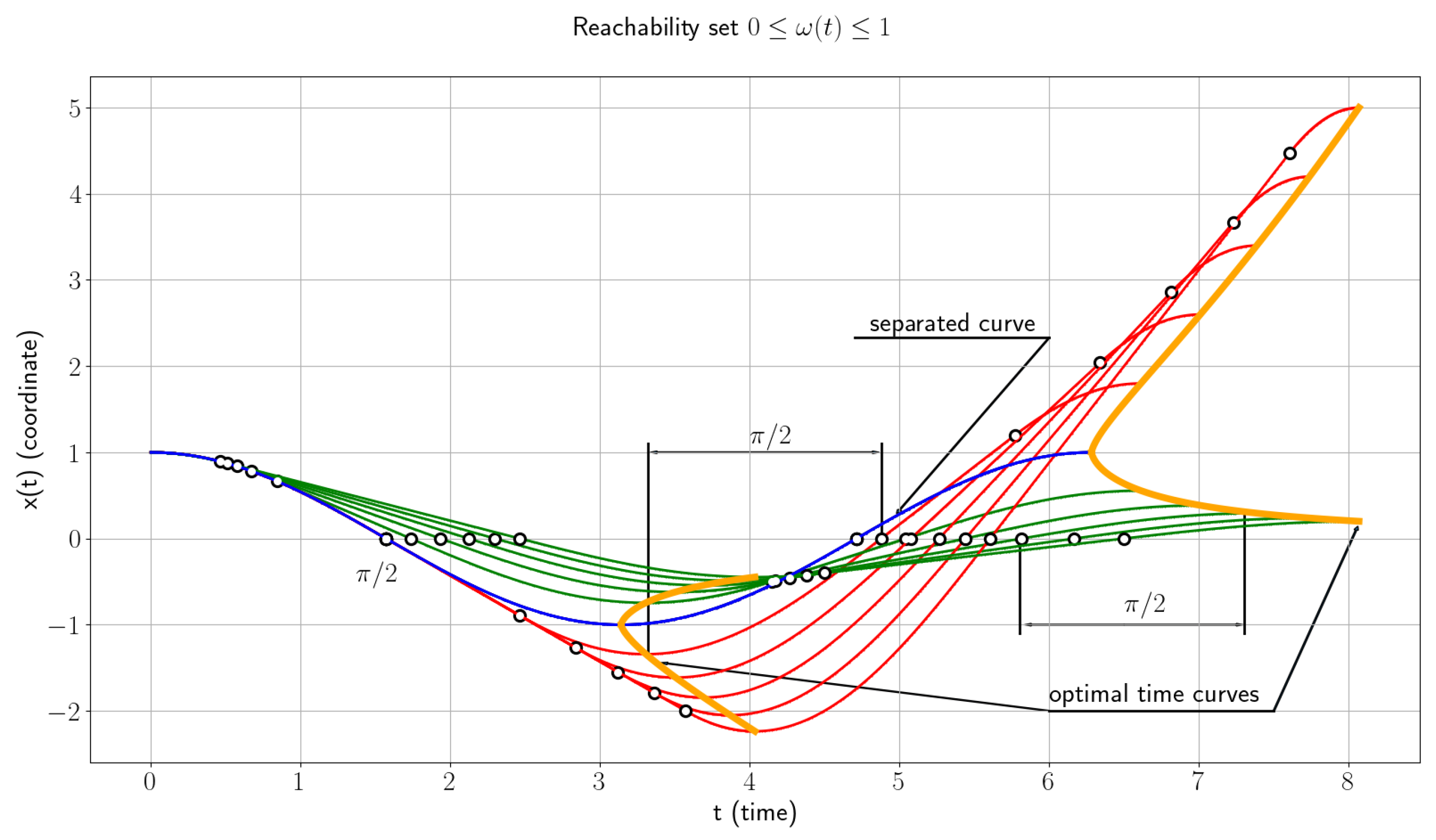
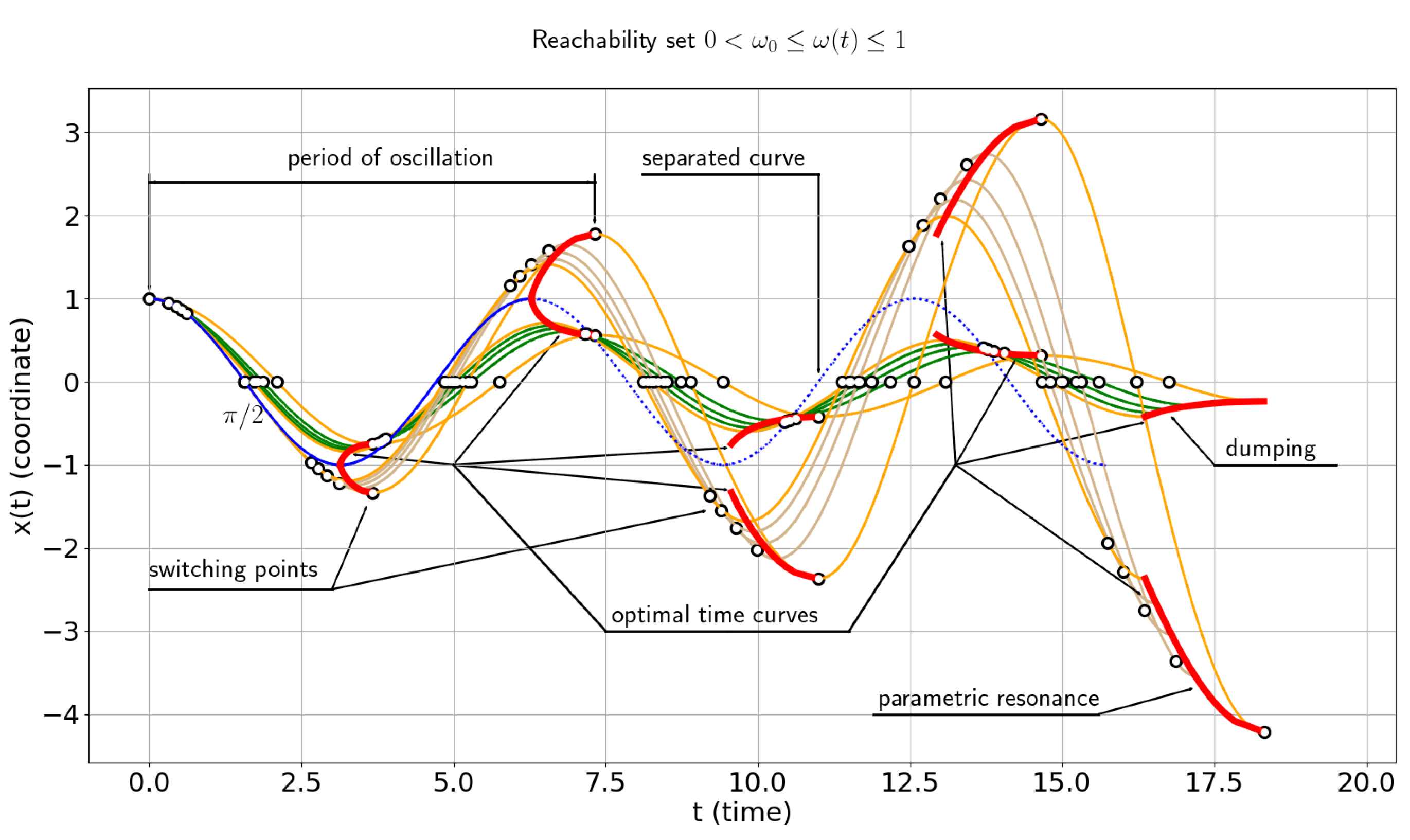
8. Construction of the Set of Reachability
- 1.
- Determine the optimal time curve that belongs to.
- 2.
- Choose a trajectory that converges to the terminal point; this trajectory will be optimal (see Figure 4).
- 3.
9. Conclusions and Outlook
- Constraints on the parameters under which nontrivial solutions occur were established.
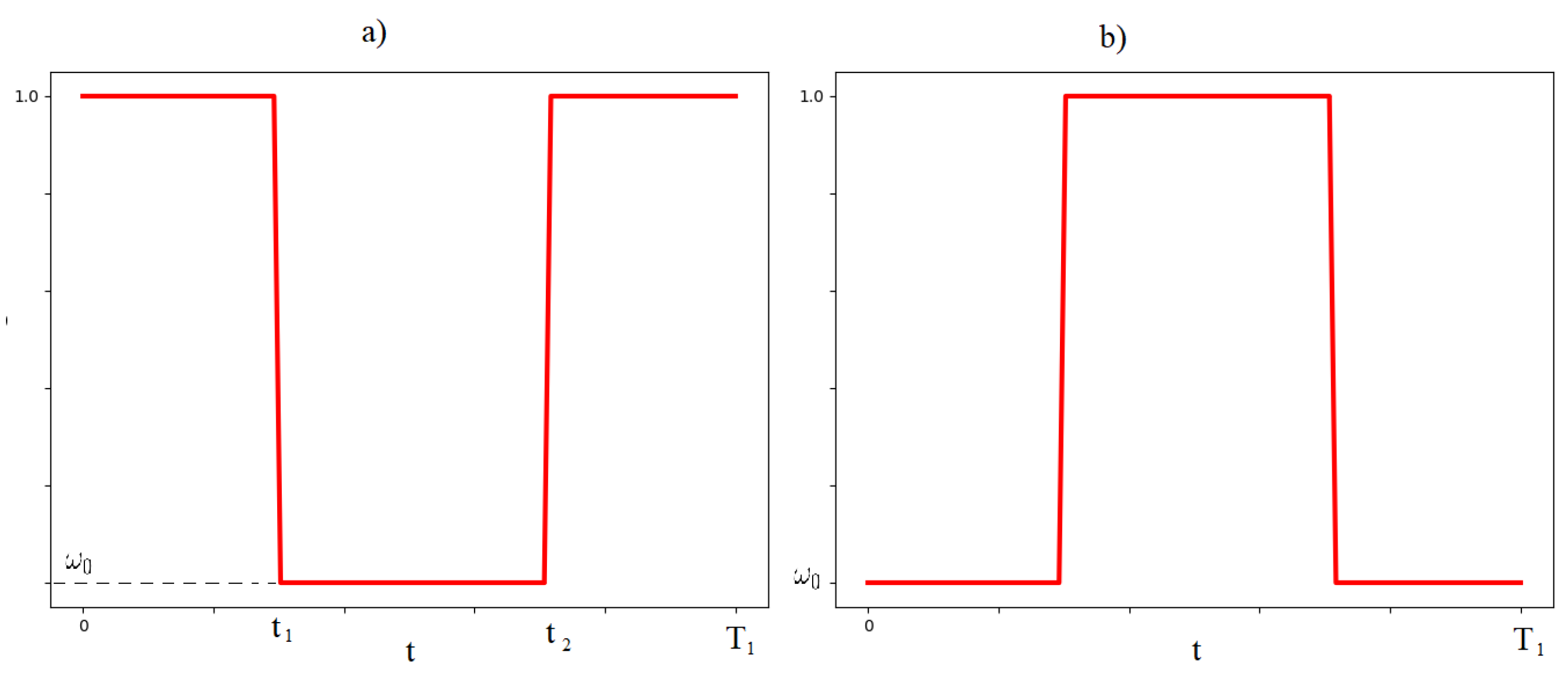
- Points were identified where the coefficients of the equation can be switched, for arbitrary input parameters, to achieve an optimal solution.
- The reachability set was constructed for the conditions and
- It was proved that the values of the extremum points of the optimal trajectories (inside and on the boundary of the reachability set in Figure 4) form either an increasing geometric progression in the case of parametric resonance or a decreasing geometric progression in the case of damping.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations and Nomenclature
Abbreviations
Nomenclature
| Notation | Description |
| Time variables | |
| Coordinate functions | |
| Velocity | |
| Acceleration | |
| Control function | |
| Optimal time | |
| Boundary conditions | |
| Switching points | |
| Lower limit of the control function | |
| Discrete values of |
References
- Mathieu, E. Course de Physique Mathematique; CLAVREUIL: Paris, France, 2003. [Google Scholar]
- Magnus, S.; Winkler, W. Hill’s Equation; Dover Publications: Mineola, NY, USA, 2004. [Google Scholar]
- Yakubovich, V.A.; Starzhinskii, V.M. Linear Differential Equations with Periodic Coefficients; Wiley: Hoboken, NJ, USA, 1975. [Google Scholar]
- Case, K.M. Singular potentials. Phys. Rev. 1950, 80, 797. [Google Scholar] [CrossRef]
- Case, W.B. The pumping of a swing from the standing position. Am. J. Phys. 1996, 64, 215–220. [Google Scholar] [CrossRef]
- Yakubu, G.; Olejnik, P.; Awrejcewicz, J. On the modeling and simulation of variable—Length pendulum. Arch. Comput. Methods Eng. 2022, 29, 2397–2415. [Google Scholar] [CrossRef]
- Hatvani, L. On the parametrically excited pendulum equation with a step function coefficient. Int. J-Non-Linear Mech. 2015, 77, 172–182. [Google Scholar] [CrossRef]
- Luo, Q.; Chevallereau, C.; Aoustin, Y. Walking Stability of a Variable Length Inverted Pendulum Controlled with Virtual Constraints. Int. J. Humanoid Robot. 2019, 16, 1950040. [Google Scholar] [CrossRef]
- Pontryagin, L.S. The Mathematical Theory of Optimal Processes, 1st ed.; Routledge: London, UK, 1987; 360p. [Google Scholar] [CrossRef]
- Walczak, S. Well-posed and ill-posed optimal control problems. J. Optim. Theory Appl. 2001, 109, 169–185. [Google Scholar] [CrossRef]
- Pörner, F. Regularization Methods for Ill-Posed Optimal Control Problems. Ph.D. Thesis, Wuürzburg University Press, Würzburg, Germany, 2018. [Google Scholar] [CrossRef]
- Huntul, M.J.; Abbas, M.; Baleanu, D. An inverse problem of reconstructing the time-dependent coefficient in a one-dimensional hyperbolic equation. Adv Differ Equ. 2021, 2021, 452. [Google Scholar] [CrossRef]
- Flaherty, J.; O’Malley, R. On the computation of singular controls. IEEE Trans. Autom. Control. 1977, 22, 640–648. [Google Scholar] [CrossRef]
- Goncharsky, A.V.; Romanov, S.Y. A method of solving the coefficient inverse problems of wave tomography. Comput. Math. Appl. 2019, 77, 967–980. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ternovski, V.; Ilyutko, V. Control the Coefficient of a Differential Equation as an Inverse Problem in Time. Mathematics 2024, 12, 329. https://doi.org/10.3390/math12020329
Ternovski V, Ilyutko V. Control the Coefficient of a Differential Equation as an Inverse Problem in Time. Mathematics. 2024; 12(2):329. https://doi.org/10.3390/math12020329
Chicago/Turabian StyleTernovski, Vladimir, and Victor Ilyutko. 2024. "Control the Coefficient of a Differential Equation as an Inverse Problem in Time" Mathematics 12, no. 2: 329. https://doi.org/10.3390/math12020329
APA StyleTernovski, V., & Ilyutko, V. (2024). Control the Coefficient of a Differential Equation as an Inverse Problem in Time. Mathematics, 12(2), 329. https://doi.org/10.3390/math12020329