

Analyzing Soliton Solutions of the Extended (3 + 1)-Dimensional Sakovich Equation

Abstract
:1. Introduction
2. The Methodology of GERFM
3. Applications
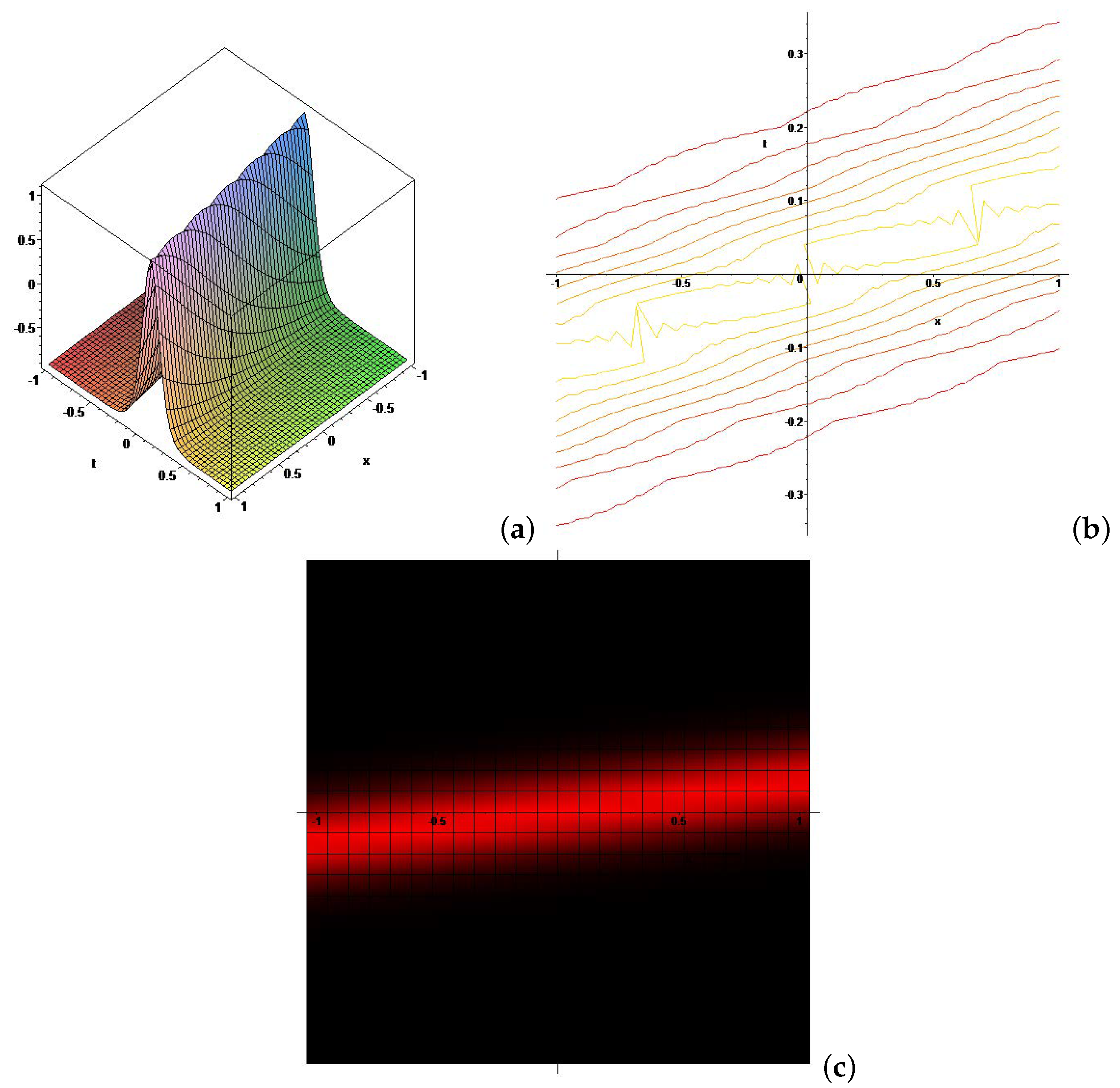
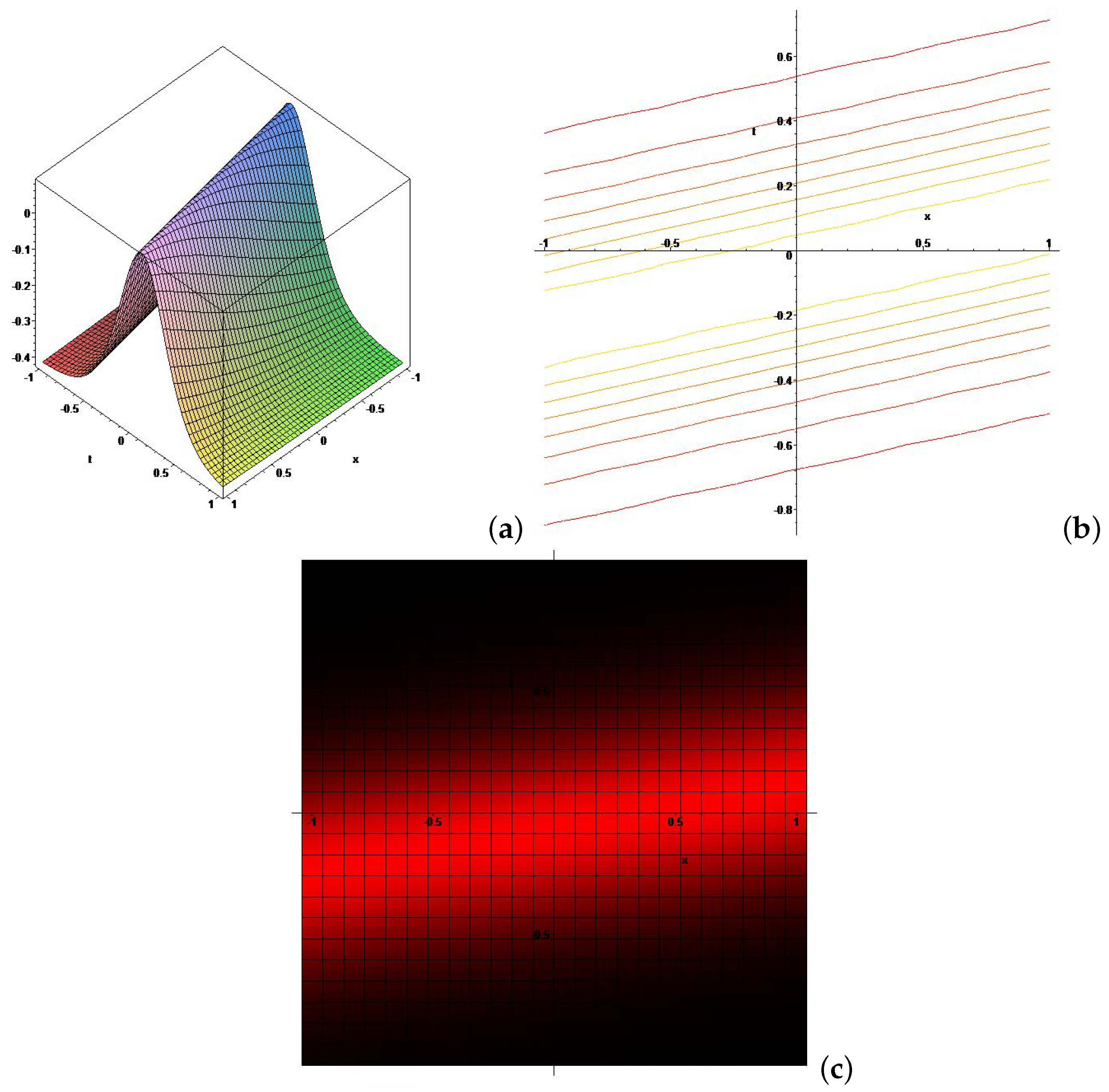
4. Graphical Representations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Seadawy, A.R.; Arshad, M.; Lu, D. The weakly nonlinear wave propagation theory for the Kelvin-Helmholtz instability in magnetohydrodynamics flows, Chaos. Solitons Fractals 2020, 139, 110141. [Google Scholar] [CrossRef]
- Raza, N.; Abdel-Aty, A.H. Traveling wave structures and analysis of bifurcation and chaos theory for Biswas-Milovic Model in conjunction with Kudryshov’s law of refractive index. Optik 2023, 287, 171085. [Google Scholar] [CrossRef]
- Cheng, L.; Ma, W.X. Similarity Transformations and Nonlocal Reduced Integrable Nonlinear Schrödinger Type Equations. Mathematics 2023, 11, 4110. [Google Scholar] [CrossRef]
- Ma, W.X.; Batwa, S.; Manukure, S. Dispersion-Managed Lump Waves in a Spatial Symmetric KP Model. East Asian J. Appl. Math. 2023, 13, 246–256. [Google Scholar] [CrossRef]
- Raza, N.; Deifalla, A.; Rani, B.; Shah, N.A.; Ragab, A.E. Analyzing Soliton Solutions of the (n+1)-dimensional generalized Kadomtsev-Petviashvili equation: Comprehensive study of dark, bright, and periodic dynamics. Results Phys. 2024, 56, 107224. [Google Scholar] [CrossRef]
- Malfliet, W. Solitary wave solutions of nonlinear wave equations. Am. J. Phys. 1992, 60, 650–654. [Google Scholar] [CrossRef]
- Rizvi, S.T.R.; Seadawy, A.R.; Alsallami, S.A.M. Grey-Black Optical Solitons, Homoclinic Breather, Combined Solitons via Chupin Liu’s Theorem for Improved Perturbed NLSE with Dual-Power Law Nonlinearity. Mathematics 2023, 11, 2122. [Google Scholar] [CrossRef]
- Taghizadeh, N.; Mirzazadeh, M.; Tascan, F. The first-integral method applied to the Eckhaus equation. Appl. Math. Lett. 2012, 25, 798–802. [Google Scholar] [CrossRef]
- Mishaev, R.A. Auto-Bäcklund transformations for the nonlinear Schrödinger equation with variable coefficients. Theor. Math. Phys. 1995, 102, 144–152. [Google Scholar] [CrossRef]
- Kemaloglu, B.; Yel, G.; Bulut, H. An application of the rational sine-Gordon method to the Hirota equation. Opt. Quantum Electron. 2023, 55, 658. [Google Scholar] [CrossRef]
- Alam, M.N.; Ilhan, O.A.; Manafian, J.; Asjad, M.I.; Rezazadeh, H.; Baskonus, H.M. New Results of Some of the Conformable Models Arising in Dynamical Systems. Adv. Math. Phys. 2022, 2022, 7753879. [Google Scholar] [CrossRef]
- Inc, M.; Alqahtani, R.T.; Iqbal, M.S. Stability analysis and consistent solitary wave solutions for the reaction-diffusion regularized nonlinear model. Results Phys. 2023, 54, 107053. [Google Scholar] [CrossRef]
- Malik, S.; Hashemi, M.S.; Kumar, S.; Rezazadeh, H.; Mahmoud, W.; Osman, M.S. Application of new Kudryashov method to various nonlinear partial differential equations. Opt. Quantum Electron. 2023, 55, 8. [Google Scholar] [CrossRef]
- Akbulut, A.; Tascan, F.; Ozel, E. Trivial conservation laws and solitary wave solution of the fifth order Lax equation. Partial Differ. Appl. Math. 2021, 4, 100101. [Google Scholar] [CrossRef]
- Akbulut, A.; Rezazadeh, H.; Hashemi, M.S.; Tascan, F. The (3 + 1)-dimensional Wazwaz-KdV equations: The conservation laws and exact solutions. Int. J. Nonlinear Sci. Numer. 2023, 24, 673–693. [Google Scholar] [CrossRef]
- Liu, S.K.; Fu, Z.; Liu, S.D.; Zhao, Q. Jacobi elliptic function method and periodic wave solutions of nonlinear wave equations. Phys. Lett. A 2001, 289, 69–74. [Google Scholar] [CrossRef]
- Yang, X.F.; Deng, Z.C.; Wei, Y. A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 2015, 117. [Google Scholar] [CrossRef]
- Humbu, I.; Muatjetjeja, B.; Motsumi, T.G.; Adem, A. Solitary waves solutions and local conserved vectors for extended quantum Zakharov-Kuznetsov equation. Eur. Phys. J. Plus 2023, 138, 873. [Google Scholar] [CrossRef]
- Wazwaz, A.M.; Hammad, M.A.; Al-Ghamdi, A.O.; Alshehri, M.H.; El-Tantawy, S.A. New (3 + 1)-Dimensional Kadomtsev-Petviashvili-Sawada-Kotera-Ramani Equation: Multiple-Soliton and Lump Solutions. Mathematics 2023, 11, 3395. [Google Scholar] [CrossRef]
- Sakovich, S. A new Painlevé-integrable equation possessing KdV-type solitons. arXiv 2019, arXiv:1907.01324. [Google Scholar]
- Wazwaz, A.M. A new (3 + 1)-dimensional Painlevé-integrable Sakovich equation: Multiple soliton solutions. Int. J. Numer. Methods Heat Fluid Flow 2021, 31, 3030–3035. [Google Scholar] [CrossRef]
- Singh, S.; Ray, S.S. Painlevé analysis, auto-Bäcklund transformation and new exact solutions of (2+1) and (3 + 1)-dimensional extended Sakovich equation with time dependent variable coefficients in ocean physics. J. Ocean Eng. Sci. 2023, 8, 246–262. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Two new Painlevé-integrable extended Sakovich equations with (2+1) and (3 + 1) dimensions. Int. J. Numer. Methods Heat Fluid Flow 2020, 30, 1379–1387. [Google Scholar] [CrossRef]
- Younis, M.; Seadawy, A.R.; Baber, M.Z.; Yasin, M.W.; Rizvi, S.T.; Iqbal, M.S. Abundant solitary wave structures of the higher dimensional Sakovich dynamical model. Math. Methods Appl. Sci. 2021. [Google Scholar] [CrossRef]
- Ma, Y.L.; Wazwaz, A.M.; Li, B.Q. A new (3 + 1)-dimensional Sakovich equation in nonlinear wave motion: Painlevé integrability, multiple solitons and soliton molecules. Qual. Theory Dyn. Syst. 2022, 21, 158. [Google Scholar] [CrossRef]
- Ali, K.K.; AlQahtani, S.A.; Mehanna, M.S.; Wazwaz, A.M. Novel soliton solutions for the (3 + 1)-dimensional Sakovich equation using different analytical methods. J. Math 2023, 2023, 4864334. [Google Scholar] [CrossRef]
- Cortez, M.V.; Raza, N.; Kazmi, S.S.; Chahlaoui, Y.; Basendwah, G.A. A novel investigation of dynamical behavior to describe nonlinear wave motion in (3 + 1)-dimensions. Results Phys. 2023, 55, 107131. [Google Scholar] [CrossRef]
- Ghanbari, B.; Inc, M.; Yusuf, A.; Bayram, M. Exact optical solitons of Radhakrishnan-Kundu-Lakshmanan equation with Kerr law nonlinearity. Mod. Phys. Lett. B 2019, 33, 1950061. [Google Scholar] [CrossRef]
- Gunay, B.; Kuo, C.K.; Ma, W.X. An application of the exponential rational function method to exact solutions to the Drinfeld-Sokolov system. Results Phys. 2021, 29, 104733. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alqahtani, R.T.; Kaplan, M. Analyzing Soliton Solutions of the Extended (3 + 1)-Dimensional Sakovich Equation. Mathematics 2024, 12, 720. https://doi.org/10.3390/math12050720
Alqahtani RT, Kaplan M. Analyzing Soliton Solutions of the Extended (3 + 1)-Dimensional Sakovich Equation. Mathematics. 2024; 12(5):720. https://doi.org/10.3390/math12050720
Chicago/Turabian StyleAlqahtani, Rubayyi T., and Melike Kaplan. 2024. "Analyzing Soliton Solutions of the Extended (3 + 1)-Dimensional Sakovich Equation" Mathematics 12, no. 5: 720. https://doi.org/10.3390/math12050720
APA StyleAlqahtani, R. T., & Kaplan, M. (2024). Analyzing Soliton Solutions of the Extended (3 + 1)-Dimensional Sakovich Equation. Mathematics, 12(5), 720. https://doi.org/10.3390/math12050720