Let us consider now the nonlinear system
, defined by a multidimensional function
, the zero
for which we are searching. Our aim is to generalize the family (
1) to nonlinear systems, and the main drawback is the existence of the quotient
. This usually makes the method non-extendable to several variables, but in the recent literature (see for example, [
26,
27]), the authors solved it by means of the following strategy: the quotient can be written as:
but
; and from first step of (
1), we have
. Therefore,
where
is the first-order divided difference. Now, the class (
1) can be written in the following way for nonlinear systems:
where
is a matrix-valued function and
is the midpoint of
and
, i.e.,
.
Some Special Cases and Their Computational Indices
Now, we present some particular cases of the family (
11) by using different functions
. In the following, we show several selected functions. Let us remark that if
, the method is not new, as it appears in [
30]. In the following, we focus our attention on the new schemes, describing in each case the computational effort that they involve, in terms of functional evaluations
d and the amount of products and quotients
. By using this information, we are going to use the multidimensional extension of the efficiency index defined by Ostrowski in [
31] as
and the computational efficiency index
defined in [
29] as
, where
p is the order of convergence,
d is the number of functional evaluations per iteration, and
is the number of products-quotients per iteration.
If
is replaced in (
11), the resulting scheme is denoted as Scase-1,
,
.
We denote by Scase-2 the iterative scheme resulting from using
in (
11).
By substituting
in (
11), procedure Scase-3 is obtained.
If we replace
in (
11), the resulting method is called Scase-4.
In order to compare our proposed schemes with other similar ones (of the same order of convergence) existing in the literature, we introduce in what follows some of them, including their respective iterative expressions. This will allow us to calculate their corresponding efficiency indices.
In 2008, Nedzhibov [
14] extended the original Jarratt’s method (see [
15]) for the multi-dimensional case with the help of the Chebyshev-Halley family, whose iterative expression is:
denoted in the following as JM.
On the other hand, Hueso et al. in [
17] (Equations (1)–(5)) designed the fourth-order scheme:
where
,
,
,
and
is a free disposable parameter. This scheme is denoted throughout the manuscript as HM for
.
Moreover, Junjua et al. in [
18] designed a Jarratt-type scheme of the fourth-order of convergence, denoted as JAM, whose iterative expression is:
where
.
In
Table 2, the efficiency indices
I of the new methods Scase-1, Scase-2, Scase-3, and Scase-4 are presented, together with the known methods JM, HM, and JAM. The number of functional evaluations in all these schemes is different, but the order of convergence is the same. To calculate the efficiency index
I, it must be taken into account that the number of functional evaluations of one
F,
, and first-order-divided difference
at certain iterates are
m,
, and
, respectively,
m being the size of the system. Despite the differences in the structure of the new and existing methods, index
I is the same for all of them.
On the other hand, to compute an inverse linear operator, we solve an linear system, where as we know, the number of products-quotients that we need to perform to obtain the solution of the system by means of the decomposition is In addition, we need products for matrix-vector multiplication and quotients for a divided difference.
Therefore, we calculate the
of method Scase-1. For each iteration, we need to evaluate function
F twice, once Jacobian
, and once the divided difference, so
functional evaluations are needed. In addition, we must solve three linear systems with
as coefficients matrix (that is,
products-quotients),
quotients for calculating the divided difference, one matrix-vector product (
products-quotients), and three vector-vector products (
products-quotients). Therefore, the value of index
for method Scase-1 on a nonlinear system of size
is:
In
Table 3, we show index
of schemes Scase-1, Scase-2, Scase-3, Scase-4, JM, HM, and JAM. In it,
denotes the number of functional evaluations,
is the number of linear systems with the matrix of coefficients
to be solved,
is the number of linear systems with other matrices of coefficients that are solved, and
,
denote the number of matrix-vector and vector-vector products, respectively.
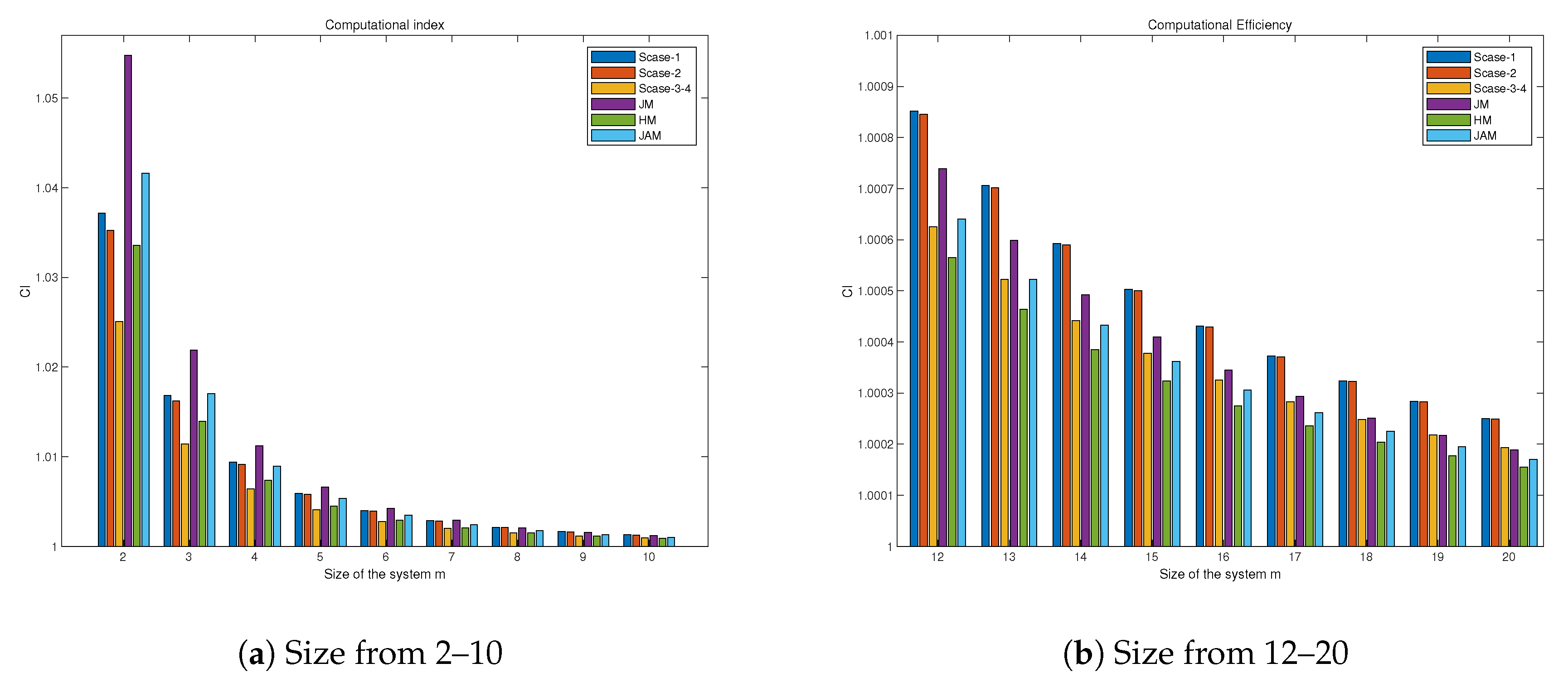
We observe that, although index
I is the same in all these cases, this is not the case of index
, since the number of inverse linear operators is different for each scheme. In
Figure 1, index
for those methods and systems of size from 2–20 is shown. We can observe that, for a size of the system greater than eight, the best index corresponds to the proposed methods Scase-1 and Scase-2, due to the number of linear systems to be solved and the factor of the dominating term, that is
, in comparison to
in other schemes.






{kind=link}