1. Introduction
Throughout this article, we let H be a real Hilbert spaces with inner products and norms and let C be a nonempty closed convex subset of a real Hilbert spaces H.
Definition 1. Let C be a nonempty subset of a real Hilbert spaces H and be a self mapping. Z is called a nonexpansive mapping ifZ is called a firmly nonexpansive mapping if A mapping
is called
α-inverse strongly monotone [
1], if there exists a positive real number
such that
If
is
-inverse strongly monotone, then
W is
monotone mapping, that is,
Remark 1. (i) If in Equation (1), then W is firmly nonexpansive mapping.
For
, let
be a single-valued mapping and
be a multi-valued mapping, from the concept of variational inclusion problems, Khuangsatung and Kangtunyakarn [
2] introduced the problem of finding
such that
for all
with
and
is a zero vector. This problem is called
the modified variational inclusion. The set of solutions of Equation (
2) is denoted by
. If we set
for
then Equation (
2) reduces to
, which is the
variational inclusion problem. The set of solution of variational inclusion problem is denoted by
.
The variational inclusion problems are extensively studied in mathematical programming, optimal control, mathematical economics, etc. In recent years, considerable interest has been shown in developing various extensions and generalization of the variational inclusion problem; for instance [
3,
4] and reference therein.
The operator
M is called a maximal monotone [
5], if
M is monotone, i.e.,
, wherever
and the graph
of
M (that is,
) is not property contained in the graph of any other monotone operator.
Let resolvent operator be defined by , for all , where M is a multi-valued maximal monotone mapping, and I is an identity mapping.
Let
be a mapping. A point
is called a fixed point of
T if
. The set of fixed points of
T is denoted
. Fixed point problem is an important area of mathematical analysis. This problem applies about the solution in many problem in Hilbert space such as nonlinear operator equation, variational inclusion problem, etc.; for instance [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18].
Khuangsatung and Kangtunyakarn [
2] proposed the following iterative algorithm:
where
is a
-strictly pseudononspreading mapping (i.e., if there exists
such that
,
) and under certain assumptions of
is a bifunction for all
, they proved strong convergence theorem for solving the modified variational inclusion problem under some suitable conditions of
,
,
,
,
and
.
Over the decades, there are many mathematicians interested in studying the variational inequality problem, which is one of the important problems. The methods used to solve this problem can be applied for other solutions such as physics, economics, finance, optimization, network analysis, medical images, water resourced and structural analysis. The set of solution of the
variational inequality problem is denoted by
for all
and
is a mapping.
Many iterative methods have been developed for solving variational inequality problem, see, for instance [
7,
8].
By using the concept of the variational inequality problem, Moudafi and Mainge [
9] firstly introduced
hierarchical fixed point problem for a nonexpansive mapping
T with respect to another nonexpansive mapping
S on
H: Find
such that
where
is a nonexpansive mapping. It is easy to see that Equation (
3) is equivalent to the following fixed point problem: Find
such that
where
is the metric projection of
H onto
. The solution set of Equation (
3) is denoted by
. It is obvious that
. Note that Equation (
3) covers monotone variational inequality on fixed point sets, minimization problem, etc. Many iterative methods have been developed for solving the hierarchical fixed point problem in Equation (
3), see example [
9,
10,
11].
By using the concept of Krasnoselski–Mann iterative algorithm, Moudafi [
10] introduced iterative scheme (
5) for nonexpansive mapping
on a subset
C of Hilbert space:
He proved the weak convergence theorem of the sequence , where , satisfies
- (i)
,
- (ii)
,
- (iii)
.
Let
and
be two real Hilbert spaces and
C,
Q be a nonempty closed convex subset of a real Hilbert spaces
and
, respectively. Let
be a bounded linear operator. Censor and Elfving [
14] introduced
the split feasibility problem which is to find a point
and
. Many authors have studied this concept of SEP to modified their problem, see example [
12,
13,
14,
15].
In 2010, Censor, Gibali and Reich [
13] introduced the split variational inequality problem which relies on the split feasibility problem and thus created the iterative algorithm for solving a strong convergence theorem of the split variational inclusion problem; more detail [
13].
The split monotone variational inclusion problem, which consists of special cases, which is being used in practice as a model in the intensity-modulated radiation therapy treatment planning, the modeling of many inverse problems, and other problems; see for instance [
11,
12,
13,
14,
15].
For every
. Let
,
be mappings and
and
be multi-value mappings. Inspired and motivated by Moudafi [
12] and Khuangsatung and Kangtunyakarn [
2], we define
the split combination of the variational inclusion problem (SCVIP) which is find
such that
and
where
is a bounded linear operator and
.
The set of all the solutions for Equations (
6) and (
7) are denoted by
.
If we set
and
for all
then SCVIP reduces to
the split monotone variational inclusion problem (SMVI), which is,
and such that
introduced by Moudafi [
12]. The set of all these solutions for Equations (
8) and (
9) are denoted by
.
Very recently, Kazmi et al. [
11] proved the strong convergence theorem under suitable condition of parameters for solving the hierarchical fixed point problem and SMVI by using hybrid iterative method as follows:
where
,
are multi-valued maximal monotone operators,
is
-inverse strongly monotone mapping,
is
-inverse strongly monotone mapping,
is a finite family of nonexpansive mappings and
is a
W-mapping generated by
and
for all
.
Based on the results mentioned above, we give our theorem for SCVIP and some important results as follows:
- (i)
We first establish Lemma 8 which shows the equivalence between SCVIP and fixed point problem of nonexpansive mapping under suitable conditions on our parameters. Further, we give some example to support Lemma 8 and the example shows that Lemma 8 is not true if some condition fails.
- (ii)
We establish a strong convergence theorem of the sequences generated by the modified Halpern iterative method for finding a common solution of hierarchical fixed point problem for a nonexpansive mapping and SCVIP.
- (iii)
We apply our main result to obtain a strong convergence theorem of the sequences generated by the modified Halpern iterative method for finding a common solution of hierarchical fixed point problem for a nonexpansive mapping and split combination of variational inequality problem and a strong convergence theorem for finding a common solution of hierarchical fixed point problem for nonexpansive mapping and split zero point problem.
- (iv)
We give some illustrative numerical examples to support our main result and our examples show that our main result is not true if some conditions fail.
2. Preliminaries
In this paper, we denote weak and strong convergence by the notations ’⇀’ and ’→’, respectively. We recall some concepts and results needed in the sequel.
Let
H be a real Hilbert space and let
C be a nonempty closed convex subset of
H. Then for any
, there exists a unique nearest point in
C, denoted by
, such that
The mapping
is called the matric projection of
H onto
C. It is well known that
is nonexpansive and satisfies
Moreover,
is characterized by the fact
and
which implies that
Lemma 1 ([
4])
. Let , and be sequences such thatAssume . Then the following results hold:
- (i)
if where , then is a bounded sequence,
- (ii)
if and , then .
Lemma 2 ([
19])
. Let E be a uniformly convex Banach space, C a nonempty closed convex subset of E, and a nonexpansive mapping with . Then is demiclosed at zero.
Lemma 3 ([
4])
. Let be a solution of variational inclusion if and only if , i.e.,where is a single-valued mapping. Further, if , then is a closed convex subset in H.
Lemma 4 ([
4])
. The resolvent operator associated with M is single-valued, nonexpansive for all and 1-inverse strongly monotone.
Lemma 5 ([
2])
. Let H be a real Hilbert space and let be a multi-valued maximal monotone mapping. For every , let be -inverse strongly monotone mapping with and . Thenwhere and for every . Moreover, is a nonexpansive mapping, for all .
Example 1. Let . For every , let define by for all and be defined by for all . Let for all . Then .
Proof of Solution. Since
, we have
is
-inverse strongly monotone mapping. By definition of
and
, we have
From Lemma 5, we have . □
Example 2. Let . For every , let define by for all and be defined by for all . Let for all . Then .
Proof of Solution. Since
, we have
is
-inverse strongly monotone mapping. By definition of
and
, we have
Then and . It implies that because . □
Remark 2. Example 1 shows that Lemma 5 is true where and Example 2 shows that Lemma 5 is not true if a condition fails, that is .
Lemma 6 ([
17])
. Let be a nonempty closed and convex set and let be a nonexpansive mapping. Then is closed and convex.
Lemma 7. Let and be Hilbert spaces. Let be a multi-valued maximal monotone mapping and be a multi-valued maximal monotone mapping. Let be a bounded linear operator. For every , let be -inverse strongly monotone with and be -inverse strongly monotone with . For each , thenwhere , , and with L is the spectral radius of .
Proof. Let
. Consider
We introduce Lemma 8 which shows an association between the SCVIP and the fixed point problem of nonexpansive mapping under suitable conditions on our parameters. Furthermore, we give examples for supporting Lemma 8 and the examples shows that Lemma 8 is not true if parameters are not satisfied.
Lemma 8. Let and be Hilbert spaces. Let be a multi-valued maximal monotone mapping and be a multi-valued maximal monotone mapping. Let be a bounded linear operator. For every , let be -inverse strongly monotone with and be -inverse strongly monotone with . Suppose that . Then the following are equivalent:
- (i)
- (ii)
,
where , , and with L is the spectral radius of .
Proof. Let the condition holds.
Let , we have and .
From Lemma 3, we have and , which implies that and .
By
and
, we have
Let and let .
We will show that and are nonexpansive, for all .
Since
be
-inverse strongly monotone mapping with
and
, we have
Thus is a nonexpansive mapping, for all . By using the same proof, we obtain that , for all is a nonexpansive mapping and is nonexpansive mapping.
From and , we have and .
From Lemma 7 and
, we have
Applying Equation (
16), we have
From the definition of
and Equation (
17), we have
From Equations (
18) and (
19), we have
. □
Example 3. Let . For every , let define by for all and define by for all . Let be defined by for all and be defined by for all . Let , for all . Let and for all . Then .
Proof of Solution It is easy to observe
is
-inverse strongly monotone mapping and
is
-inverse strongly monotone mapping. By definition of
,
and
,
, we have
and
Then . From definition of A, we have . Choose , and . From Lemma 8, we have . □
Example 4. Let . For every , let define by for all and define by for all . Let be defined by for all and be defined by for all . Let , for all . Let and for all . Then for all .
Proof of Solution It is easy to observe
is
-inverse strongly monotone mapping and
is
-inverse strongly monotone mapping. By definition of
,
and
,
, we have
and
Then . From definition of A, we have . Choose , and , we have for all .
So Example 4 shows that Lemma 8 is not true because and . □
3. Main Result
We prove a strong convergence theorem to approximate a common solution of SCVIP and hierarchical fixed point problem of nonexpansive mapping.
Theorem 1. Let be real Hilbert spaces. Let be a multi-valued maximal monotone mapping and be a multi-valued maximal monotone mapping. Let be a bounded linear operator with its adjoint operator . Let be -inverse strongly monotone with and be -inverse strongly monotone with . Let be two nonexpansive mappings. Assume that . Let the sequence generated by andwhere with for all , , and with L is the spectral radius of . Suppose the following conditions hold: - (i)
, ,
- (ii)
, ,
- (iii)
, ,
- (iv)
, ,
- (v)
,
- (vi)
, and for all .
Then converges strongly to , where .
Proof. Step1. First, we prove that , and are bounded.
We will show that
and
are nonexpansive mapping. Since
is
-inverse strongly monotone with
, we have
Thus is a nonexpansive mapping, for all . By using the same proof, we obtain that is a nonexpansive mapping. Since and are nonexpnsive mapping, we have and are nonexpansive mapping.
Let
then
and
which
. Now, we estimate
Since
, then
and
and
. By Lemma 8, we have
By Equations (
21) and (
22), we have
From Lemma 1(i), therefore is bounded. So are , .
Step2. Show that
,
and
.
From definition of
, Lemma 7 and
, we have
From definition of
, we have
From Equations (
24)–(
26), we have
By Lemma 1(i), conditions (i) and (iii), we have
From definition of
, we have
From Equations (
21) and (
22), we have
where
. It follow that
where
. From Equation (
27), conditions (i), (ii) and (v), we have
From Equations (
28) and (
29), we have
From Equation (
29) and a condition (i), we have
From Equations (
28) and (
30), we have
From Equations (
29) and (
31), we have
Step3. .
Since
is bounded and the mappings
are nonexpansive then there exists a
such that
, for all
. Now, we estimate
which implies
Since , we have .
From
, Equation (
34) and a condition (v), we have
Thus, it follows from Equations (
32), (
33) and (
35), we have
Step4.
Since
is bounded, there exists a subsequence
which converges weakly to
. We may assume that
and
We will show that
. Assume that
, then
and using Opial’s property of Hilbert space and Equation (
35), we have
which is a contradiction. Therefore,
.
Next, we show that
. Consider
which implies
Since
T is nonexpansive, we have
is monotone. Let
, we have
which implies
Since
, we have
From Equation (
38) and
, we have
Since
S is weakly continuous and
, we obtain
From Equations (
37), (
39) and (
40), we have
Hence solve Hierarchical fixed point problem, i.e., .
Next, we show that
. Assume that
. Applying the Opial’s property, Equation (
31) and Lemma 7, we have
This is a contradiction. Then . From Lemma 8, we have . Therefore, .
Step5. Finally, we will prove that converges strongly to .
We show that
, where
. We may assume the subsequence
of
with
Since
as
and
. By Equations (
13) and (
41), we have
From Equations (
21) and (
22), we have
Applying Lemma 1(ii), conditions (i), (iv) and Equation (
42), we can conclude that the
converges strongly to
. This completes the proof. □
Next, we have the following strong convergence to approximation a common element of solution the set of SMVI and hierarchical fixed point problem of nonexpansive mapping.
Corollary 1. Let be real Hilbert spaces. Let be a multi-valued maximal monotone mapping and be a multi-valued maximal monotone mapping. Let be a bounded linear operator with its adjoint operator . Let be α-inverse strongly monotone and be β-inverse strongly monotone. Let be two nonexpansive mappings. Assume that . Let the sequence generated by andwhere with for all , , and with L is the spectral radius of . Suppose the following conditions hold: - (i)
, ,
- (ii)
, ,
- (iii)
, ,
- (iv)
, ,
- (v)
,
Then converges strongly to , where .
Proof. Put and for all in Theorem 1. From Theorem 1, we obtain the desired result. □
5. Numerical
The purpose of this section is to give a numerical example to support some of our. The following example given for supporting Theorem 1 and example show that Theorem 1 is not true if condition (iv) fails, but conditions (i), (ii), (iii), (v) and (vi) are satisfied.
Since Theorem 1 can solve hierarchical fixed point problem for a nonexpansive mapping and SCVIP which our problems can modify for concrete problem in signal processing, image reconstruction, intensity-modulated radiationtherapy treatment planning and sensor networks in computerized tomography. So, we give a numerical example as follows:
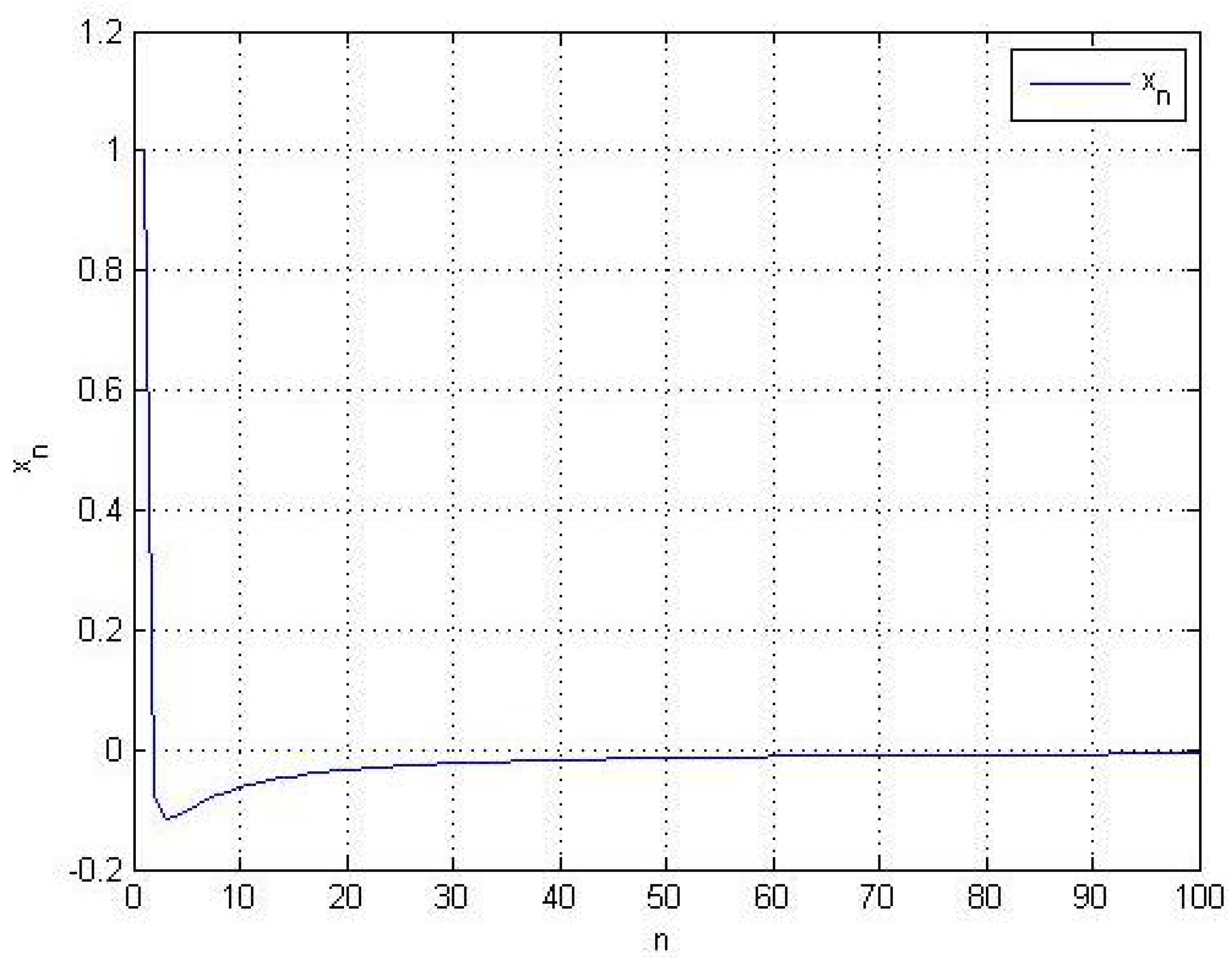
Example 5. Let , the set of all real numbers, with the inner product defined by , for all and induced usual norm . For every , let the mapping define by for all and define by for all , respectively, let be defined by , for all and , for all . Let the mapping be defined by , for all and let , so we choose . Let the mapping be defined by , for all and let the mapping be defined by , for all . Setting = , = , = , = and = , . For every , suppose that and . Then converges strongly to a point .
Proof of Solution. It is easy to check that
and
satisfies all the conditions of Theorem 1 and
is
-inverse strongly monotone and
is
-inverse strongly monotone for all
. We choose
,
. Since
, we obtain
Then
. Since
, we have
Then . Thus .
It is easy to observe that are nonexpansive mappings with , . Hence . Therefore .
For every
,
=
,
=
,
=
,
=
and
=
, then the sequence
,
,
,
and
satisfy all the conditions of Theorem 1. We rewrite (
20) as follows:
Choose
,
,
and
. The numerical for the sequence
are shown
Table 1 and
Figure 1. □
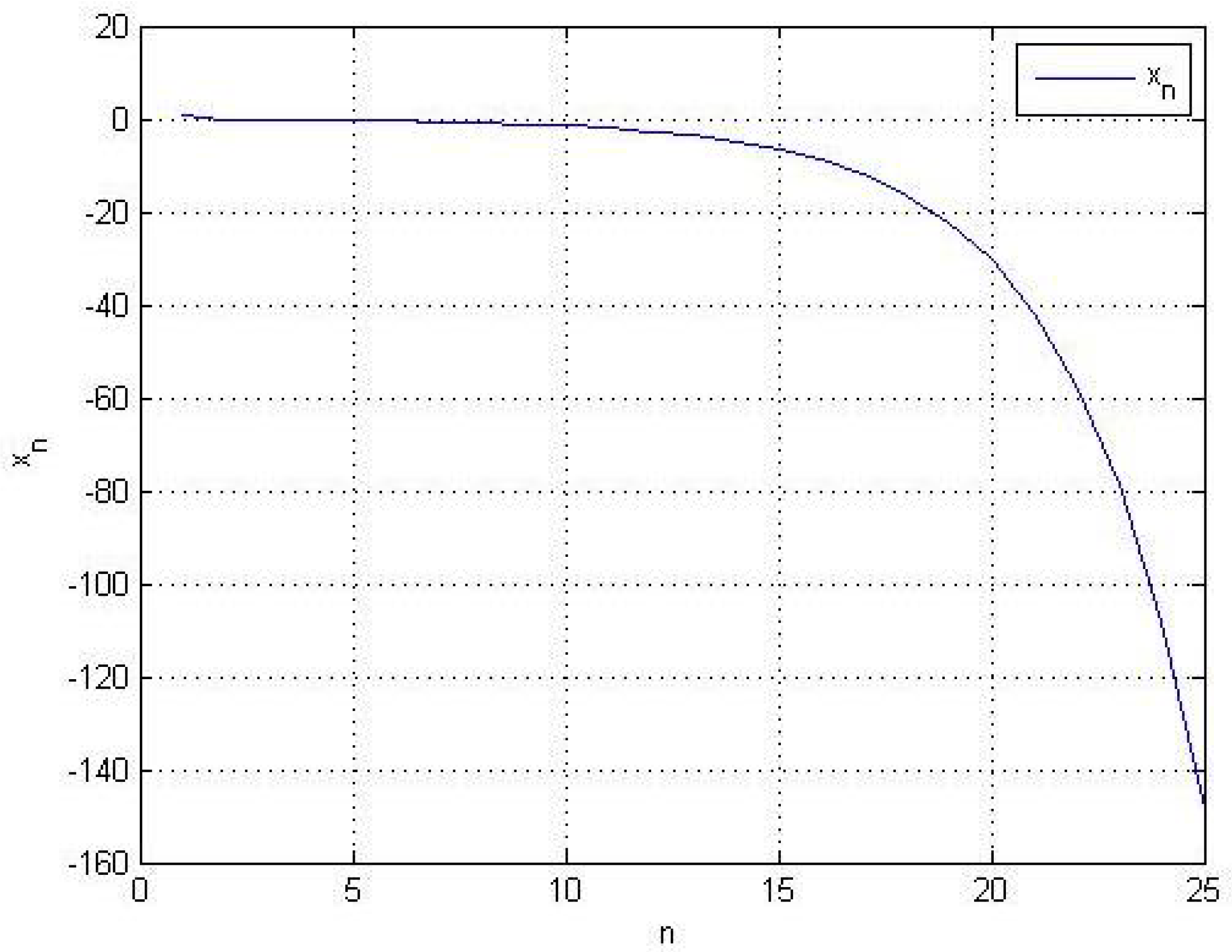
Example 6. Let , the set of all real numbers, with the inner product defined by , for all and induced usual norm . For every , let the mapping define by for all and define by for all , respectively, let be defined by , for all and , for all . Let the mapping be defined by , for all and let , so we choose . Let the mapping be defined by , for all and let the mapping be defined by , for all . Setting = , = , = , = and = , . For every , suppose that and . Then is divegence.
Proof of Solution. Note that the sequence
,
,
,
,
and
satisfies the conditions (i), (ii), (iii), (v) and (vi) from Theorem 1, while assumption (iv) does not converge to 0 since
Choose
,
,
and
. The numerical for the sequence
are shown in
Table 2 and
Figure 2. Therefore,
does not converge to 0. □
Next, we give example to support out some result in a two dimensional space of real numbers.
Example 7. Let , with the inner product defined by , for all and induced usual norm defined by for all . For every , let the mapping define by for all and define by for all , respectively, let be defined by , for all and , for all . Let the mapping be defined by , for all and let , so we choose . Let the mapping be defined by , for all and let the mapping be defined by , for all . Setting = , = , = , = and = , . For every , suppose that and . Then converges strongly to a point .
Proof of Solution. It is easy to check that and satisfies all the conditions of Theorem 1 and is -inverse strongly monotone and is -inverse strongly monotone for all . We choose , . Thus .
For definition of T and S, then T and S are nonexpansive mapping with . Hence . Therefore .
For every , = , = , = , = and = , then the sequence , , , and satisfy all the conditions of Theorem 1.
From Theorem 1, we can conclude that the sequence converges to . □




{kind=link}
{kind=link}