Improved Whale Algorithm for Solving the Flexible Job Shop Scheduling Problem


Abstract
:1. Introduction
2. Problem Description
3. Whale Optimization Algorithm
3.1. Encircling Prey
3.2. Bubble-Net Attacking
3.2.1. Shrinking Encircling Mechanism
3.2.2. Spiral Updating Position
3.3. Search for Prey
4. The Proposed IWOA
4.1. Scheduling Solution Denotation
4.2. Individual Position Vector
4.3. Conversion Mechanism
4.3.1. Conversion from Scheduling Solution to Individual Position Vector
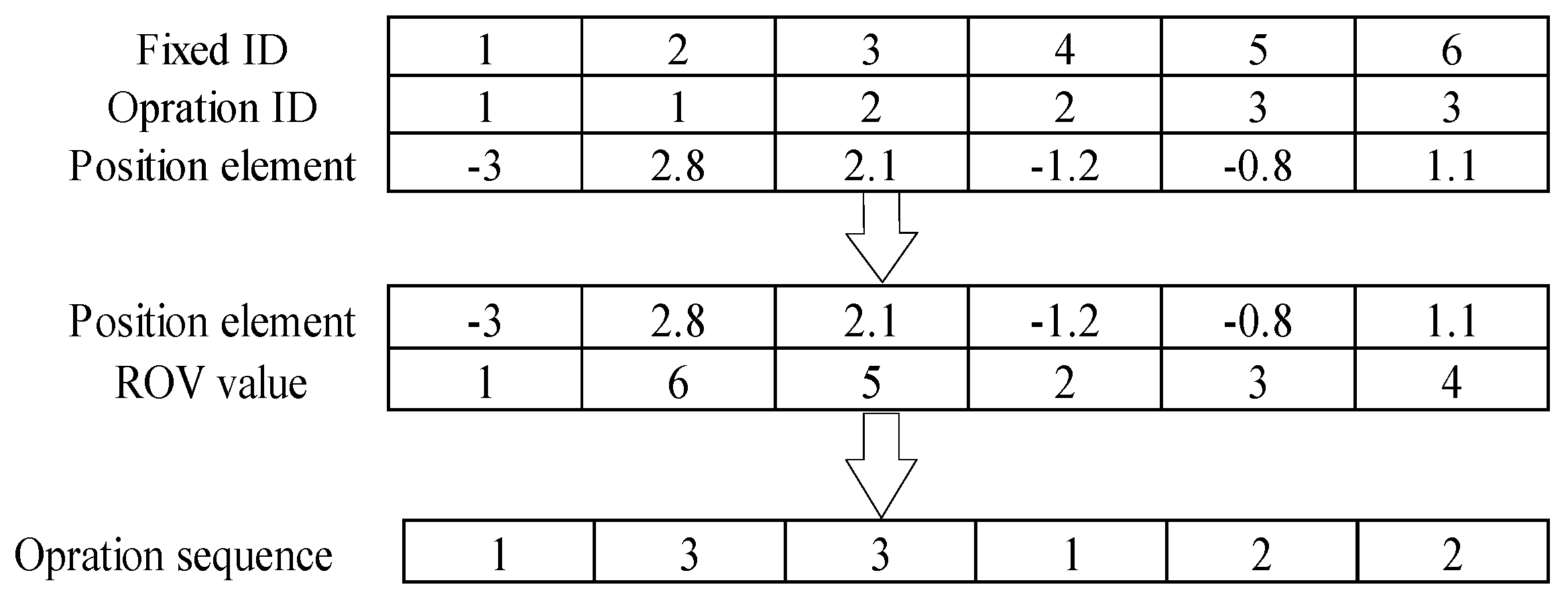
4.3.2. Conversion from Individual Position Vector to Scheduling Solution
4.4. Population Initialization
4.5. Nonlinear Convergence Factor
4.6. Adaptive Weight
4.7. Variable Neighborhood Search
| Algorithm 1. The procedure of VNS. |
| Step 1: Set the current optimal scheduling solution as the initial solution , where , , , and represents the maximum iteration, at the initial moment. |
| Step 2: If , set as ; if , set as ; if , set as ; represents the new scheduling solution, and represents employing the ith neighborhood structure operation on , where I = 1, 2, or 3. |
| Step 3: Set as , and then the local optimal scheduling solution can be obtained by executing the local search operation. |
| Step 4: If is better than , then set as , and set ; otherwise, set as . |
| Step 5: If , then set as , and go to step 6; otherwise, go to step 3. |
| Step 6: If , go to step 7; otherwise, go to step 2. |
| Step 7: End. |
| Algorithm 2. The procedure of the local search in VNS. |
| Step 1: Get the initial solution , and set , , , and maximum iteration . |
| Step 2: If , set as ; if , set as . |
| Step 3: If , then set as ; otherwise, set as . |
| Step 4: Set as , if , then set as , go to step 5; otherwise, go to step 2. |
| Step 5: End. |
4.8. The Procedure of the Proposed IWOA
| Algorithm 3. The procedure of IWOA. |
| Step 1: Set parameters and generate the initial population by utilizing the chaotic reverse learning strategy and search method. |
| Step 2 Calculate the fitness value of each scheduling solution in the population, and then find and retain the optimal scheduling solution . |
| Step 3: Judge whether the termination conditions can be met. If not met, perform steps 4–7; otherwise, perform step 8. |
| Step 4: Judge whether the value of the “iterative counter” is equal to 15. If met, go to step 5; otherwise, go to step 6. |
| Step 5: Employ the variable neighborhood search operation on , and update . |
| Step 6: Execute the conversion from scheduling solution to individual position vector, and retain the optimal individual position vector corresponding to |
| Step 7: Update each individual position vector using Equations (17), (23) and (24), and execute the conversion from individual position vector to scheduling solution; set , and then go to step 2. |
| Step 8: The algorithm ends and outputs the optimal scheduling solution . |
5. Experimental Results
5.1. Experimental Settings
5.2. Effectiveness of the Improvement Strategies
5.3. Effectiveness of the Proposed IWOA
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nowicki, E.; Smutnicki, C. A fast taboo search algorithm for the job shop problem. Manag. Sci. 1996, 42, 797–813. [Google Scholar] [CrossRef]
- Gonc, J.F.; Magalhaes Mendes, J.J.; Resende, M.G.C. A hybrid genetic algorithm for the job shop scheduling problem. Eur. J. Oper. Res. 2005, 167, 77–95. [Google Scholar] [Green Version]
- Lochtefeld, D.F.; Ciarallo, F.W. Helper-objective optimization strategies for the Job-Shop Scheduling Problem. Appl. Soft Comput. 2011, 11, 4161–4174. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S.; Sethi, R. The complexity of flow shop and job shop scheduling. Math. Oper. Res. 1976, 1, 117–129. [Google Scholar] [CrossRef]
- Brucker, P.; Schlie, R. Job-shop scheduling with multi-purpose machines. Computing 1990, 45, 369–375. [Google Scholar] [CrossRef]
- Dauzere-Peres, S.; Paulli, J. An integrated approach for modeling and solving the general multi-processor job-shop scheduling problem using tabu search. Ann. Oper. Res. 1997, 70, 281–306. [Google Scholar] [CrossRef]
- Mastrolilli, M.; Gambardella, L.M. Effective neighborhood functions for the flexible job shop problem. J. Sched. 2000, 3, 3–20. [Google Scholar] [CrossRef]
- Mati, Y.; Lahlou, C.; Dauzere-Peres, S. Modelling and solving a practical flexible job shop scheduling problem with blocking constraints. Int. J. Prod. Res. 2011, 49, 2169–2182. [Google Scholar] [CrossRef]
- Mousakhani, M. Sequence-dependent setup time flexible job shop scheduling problem to minimise total tardiness. Int. J. Prod. 2013, 51, 3476–3487. [Google Scholar] [CrossRef]
- Yuan, Y.; Xu, H.; Yang, J. A hybrid harmony search algorithm for the flexible job shop scheduling problem. Appl. Soft Comput. 2013, 13, 3259–3272. [Google Scholar] [CrossRef]
- Tao, N.; Hua, J. A cloud based improved method for multi-objective flexible job shop scheduling problem. J. Intell. Fuzzy Syst. 2018, 35, 823–829. [Google Scholar]
- Gong, G.L.; Deng, Q.W.; Gong, X.R. A new double flexible job shop scheduling problem integrating processing time, green production, and human factor indicators. J. Clean. Prod. 2018, 174, 560–576. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, Z.G.; Wang, Y. A two-stage optimization method for energy-saving flexible job shop scheduling based on energy dynamic characterization. J. Clean. Prod. 2018, 188, 575–588. [Google Scholar] [CrossRef]
- Marzouki, B.; Driss, O.B.; Ghédira, K. Multi Agent model based on Chemical Reaction Optimization with Greedy algorithm for Flexible Job shop Scheduling Problem. Procedia Comput. Sci. 2017, 112, 81–90. [Google Scholar] [CrossRef]
- Yuan, Y.; Xu, H. Multiobjective flexible job shop scheduling using memetic algorithms. IEEE Trans. Autom. Sci. Eng. 2015, 12, 336–353. [Google Scholar] [CrossRef]
- Gao, K.Z.; Suganthan, P.N.; Pan, Q.K.; Chua, T.J.; Cai, T.X.; Chong, C.S. Discrete Harmony Search Algorithm for Flexible Job Shop Scheduling Problem with Multiple Objectives. J. Intell. Manuf. 2016, 27, 363–374. [Google Scholar] [CrossRef]
- Piroozfard, H.; Wong, K.Y.; Wong, W.P. Minimizing total carbon footprint and total late work criterion in flexible job shop scheduling by using an improved multi-objective genetic algorithm. Resour. Conserv. Recycl. 2018, 128, 267–283. [Google Scholar] [CrossRef]
- Jiang, T.H.; Zhang, C.; Zhu, H.Q.; Deng, G.L. Energy-Efficient scheduling for a job shop using grey wolf optimization algorithm with double-searching mode. Math. Probl. Eng. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Singh, M.R.; Mahapatra, S. A quantum behaved particle swarm optimization for flexible job shop scheduling. Comput. Ind. Eng. 2016, 93, 36–44. [Google Scholar] [CrossRef]
- Wu, X.L.; Sun, Y.J. A green scheduling algorithm for flexible job shop with energy-saving measures. J. Clean. Prod. 2018, 172, 3249–3264. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, C. Application of grey wolf optimization for solving combinatorial problems: job shop and flexible job shop scheduling cases. IEEE Access 2018, 6, 26231–26240. [Google Scholar] [CrossRef]
- Jiang, T.H.; Deng, G.L. Optimizing the low-carbon flexible job shop scheduling problem considering energy consumption. IEEE. Access 2018, 6, 46346–46355. [Google Scholar] [CrossRef]
- Jiang, T.H.; Zhang, C.; Sun, Q. Green job shop scheduling problem with discrete whale optimization algorithm. IEEE Access 2019, 7, 43153–43166. [Google Scholar] [CrossRef]
- Li, X.Y.; Gao, L. An effective hybrid genetic algorithm and tabu search for flexible job shop scheduling problem. Int. J. Prod. Econ. 2016, 174, 93–110. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Soft. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Aljarah, I.; Faris, H.; Mirjalili, S. Optimizing connection weights in neural networks using the whale optimization algorithm. Soft. Comput. 2018, 22, 1–15. [Google Scholar] [CrossRef]
- Mafarja, M.M.; Mirjalili, S. Hybrid whale optimization algorithm with simulated annealing for feature selection. Neurocomputing 2017, 260, 302–312. [Google Scholar] [CrossRef]
- Aziz, M.A.E.; Ewees, A.A.; Hassanien, A.E. Whale optimization algorithm and moth-flame optimization for multilevel thresholding image segmentation. Expert Syst. Appl. 2017, 83, 242–256. [Google Scholar] [CrossRef]
- Oliva, D.; Aziz, M.A.E.; Hassanien, A.E. Parameter estimation of photovoltaic cells using an improved chaotic whale optimization algorithm. Appl. Energy 2017, 200, 141–154. [Google Scholar] [CrossRef]
- Jiang, T.H.; Zhang, C.; Zhu, H.Q.; Zhu, H.Q.; Gu, J.C.; Deng, G.L. Energy-efficient scheduling for a job shop using an improved whale optimization algorithm. Mathematics 2018, 6, 220. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Manogaran, G.; El-Shahat, D.; Mirjalili, S.; Gunasekaran, M. A hybrid whale optimization algorithm based on local search strategy for the permutation flow shop scheduling problem. Future Gener. Comput. Syst. 2018, 85, 129–145. [Google Scholar] [CrossRef]
- Guo, Z.Z.; Wang, P.; Ma, Y.F.; Wang, Q.; Gong, C.Q. Whale optimization algorithm based on adaptive weights and cauchy variation. Micro Comput. 2017, 34, 20–22. (In Chinese) [Google Scholar]
- Brandimarte, P. Routing and scheduling in a flexible job shop by tabu search. Ann. Oper. 1993, 41, 157–183. [Google Scholar] [CrossRef]
- Kacem, I.; Hammadi, S.; Borne, P. Correction to “Approach by localization and multiobjective evolutionary optimization for flexible job-shop scheduling problems”. IEEE Trans. Syst. Man Cybern. Part C 2002, 32, 172. [Google Scholar] [CrossRef]
- Xing, L.N.; Chen, Y.W.; Wang, P.; Zhao, Q.S.; Xiong, J. A knowledge-based ant colony optimiztion for flexible job shop scheduling problems. Appl. Soft Comput. 2010, 10, 888–896. [Google Scholar] [CrossRef]
- Li, J.Q.; Pan, Q.K.; Suganthan, P.N.; Chua, T.J. A hybrid tabu search algorithm with an efficient neighborhood structure for the flexible job shop scheduling problem. Int. J. Adv. Manuf. Technol. 2011, 52, 683–697. [Google Scholar] [CrossRef]
- Jiang, T.H. A hybrid grey wolf optimization algorithm for solving flexible job shop scheduling problem. Control Decis. 2018, 33, 503–508. (In Chinese) [Google Scholar]
- Bagheri, A.; Zandieh, M.; Mahdavi, I.; Yazdani, M. An artificial immune algorithm for the flexible job-shop scheduling problem. Future Gener. Comput. Syst. 2010, 26, 533–541. [Google Scholar] [CrossRef]
- Henchiri, A.; Ennigrou, M. Particle Swarm Optimization Combined with Tabu Search in a Multi-Agent Model. for Flexible Job Shop Problem; Springer Nature: Basingstoke, UK, 2013; Volume 7929, pp. 385–394. [Google Scholar]
- Bozejko, W.; Uchronski, M.; Wodecki, M. The New Golf Neighborhood for the Flexible Job Shop Problem; ICCS, Elsevier Series; Elsevier: Amsterdam, The Netherlands, 2010; pp. 289–296. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | WOA | WOA-1 | WOA-2 | IWOA | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| n × m | LB | Best | Avg | Time | Best | Avg | Time | Best | Avg | Time | Best | Avg | Time | |
| Kacem01 | 4 × 5 | 11 | 11 | 11.7 | 0.2 | 11 | 11.3 | 0.2 | 11 | 11 | 1.8 | 11 | 11 | 1.8 |
| Kacem02 | 8 × 8 | 14 | 22 | 26.3 | 0.4 | 16 | 17.4 | 0.4 | 14 | 15.4 | 2.9 | 14 | 14.8 | 2.9 |
| Kacem03 | 10 × 7 | 11 | 17 | 19.5 | 0.5 | 14 | 16.1 | 0.6 | 13 | 14.1 | 3.1 | 13 | 13.6 | 3.3 |
| Kacem04 | 10 × 10 | 7 | 13 | 15.8 | 0.9 | 7 | 7.5 | 1.0 | 7 | 7 | 3.8 | 7 | 7 | 4.1 |
| Kacem05 | 15 × 10 | 11 | 24 | 28.7 | 1.4 | 19 | 21.5 | 1.6 | 14 | 14.5 | 7.6 | 14 | 14.2 | 7.9 |
| MK01 | 10 × 6 | 39 | 40 | 42.3 | 1.4 | 40 | 41.9 | 1.4 | 40 | 40.5 | 7.4 | 40 | 40.2 | 8.2 |
| MK02 | 10 × 6 | 26 | 34 | 36.6 | 1.2 | 34 | 35.2 | 1.2 | 26 | 29.7 | 7.9 | 26 | 28.1 | 8.8 |
| MK03 | 15 × 8 | 204 | 235 | 2523 | 3.3 | 218 | 234.6 | 3.6 | 204 | 211.6 | 26.4 | 204 | 210.6 | 31.3 |
| MK04 | 15 × 8 | 60 | 73 | 77.6 | 2.1 | 67 | 71.3 | 2.5 | 65 | 66.1 | 13.8 | 60 | 62.3 | 15.7 |
| MK05 | 15 × 4 | 172 | 175 | 181.4 | 2.0 | 175 | 183.1 | 2.7 | 175 | 178.3 | 16.1 | 175 | 177.1 | 21.2 |
| MK06 | 10 × 15 | 58 | 93 | 98.6 | 1.3 | 97 | 105.2 | 1.5 | 65 | 71.5 | 22.5 | 63 | 64.2 | 30.5 |
| MK07 | 20 × 5 | 139 | 152 | 163.5 | 1.6 | 155 | 158.6 | 1.6 | 148 | 151.2 | 19.5 | 144 | 147.5 | 24.7 |
| MK08 | 20 × 10 | 523 | 523 | 535.1 | 5.6 | 523 | 528.1 | 5.8 | 523 | 525.2 | 62.5 | 523 | 523 | 89.2 |
| MK09 | 20 × 10 | 307 | 363 | 384.0 | 5.9 | 371 | 387.2 | 6.2 | 312 | 318.9 | 81.4 | 307 | 315.2 | 121.4 |
| MK10 | 20 × 15 | 198 | 245 | 265.2 | 6.0 | 231 | 241.3 | 6.9 | 216 | 235.3 | 76.5 | 212 | 216.6 | 96.7 |
| Instance | LB | KBACO | TSPCB | HGWO | IWOA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Best | Avg | Time | Best | Avg | Time | Best | Avg | Time | Best | Avg | Time | ||
| Kacem01 | 11 | 11 | 11 | 900 | 11 | 11 | 2.5 | 11 | 11 | 5.6 | 11 | 11 | 1.8 |
| Kacem02 | 14 | 14 | 14.3 | 3882 | 14 | 14.2 | 234 | 14 | 14.3 | 14.8 | 14 | 14.8 | 2.9 |
| Kacem03 | 11 | 11 | 11 | 3966 | 11 | 11 | 260.5 | 11 | 11.6 | 16.3 | 13 | 13.6 | 3.3 |
| Kacem04 | 7 | 7 | 7.4 | 6642 | 7 | 7 | 86 | 7 | 7.5 | 17.5 | 7 | 7 | 4.1 |
| Kacem05 | 11 | 11 | 11.3 | 9504 | 11 | 11.7 | 491 | 13 | 14.1 | 40.7 | 14 | 14.2 | 7.9 |
| Avg-T | - | - | - | 4978.8 | - | - | 214.8 | - | - | 19.0 | - | - | 4.0 |
| Instancee | LB | KBACO | TSPCB | HGWO | AIA | PSO+TS | TS3 | IWOA | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Best | RPD | Best | RPD | Best | RPD | Best | RPD | Best | RPD | Best | RPD | Best | RPD | ||
| MK01 | 39 | 39 | 0 | 40 | 2.6 | 40 | 2.6 | 40 | 2.6 | 40 | 2.6 | 41 | 5.1 | 40 | 2.6 |
| MK02 | 26 | 29 | 11.5 | 26 | 0 | 29 | 11.5 | 26 | 0 | 32 | 23.1 | 30 | 15.4 | 26 | 0 |
| MK03 | 204 | 204 | 0 | 204 | 0 | 204 | 0 | 204 | 0 | 207 | 1.5 | 204 | 0 | 204 | 0 |
| MK04 | 60 | 65 | 8.3 | 62 | 3.3 | 65 | 8.3 | 60 | 0 | 67 | 11.7 | 65 | 8.3 | 60 | 0 |
| MK05 | 172 | 173 | 0.6 | 172 | 0 | 175 | 1.7 | 173 | 0.6 | 188 | 9.3 | 174 | 1.2 | 175 | 1.7 |
| MK06 | 58 | 67 | 15.5 | 65 | 12.1 | 79 | 36.2 | 63 | 8.6 | 85 | 45.7 | 71 | 22.4 | 63 | 8.6 |
| MK07 | 139 | 144 | 3.6 | 140 | 0.7 | 149 | 7.2 | 140 | 0.7 | 154 | 10.8 | 148 | 6.5 | 144 | 3.6 |
| MK08 | 523 | 523 | 0 | 523 | 0 | 523 | 0 | 523 | 0 | 523 | 0 | 551 | 6.1 | 523 | 0 |
| MK09 | 307 | 311 | 1.3 | 310 | 1.0 | 325 | 5.9 | 312 | 1.6 | 437 | 42.3 | 410 | 33.6 | 339 | 10.4 |
| MK10 | 198 | 229 | 15.7 | 214 | 8.1 | 253 | 27.8 | 214 | 8.1 | 380 | 91.9 | 267 | 34.8 | 242 | 22.2 |
| Mean | - | - | 5.65 | - | 2.78 | - | 10.12 | - | 2.22 | - | 23.89 | - | 13.34 | - | 4.91 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luan, F.; Cai, Z.; Wu, S.; Jiang, T.; Li, F.; Yang, J. Improved Whale Algorithm for Solving the Flexible Job Shop Scheduling Problem. Mathematics 2019, 7, 384. https://doi.org/10.3390/math7050384
Luan F, Cai Z, Wu S, Jiang T, Li F, Yang J. Improved Whale Algorithm for Solving the Flexible Job Shop Scheduling Problem. Mathematics. 2019; 7(5):384. https://doi.org/10.3390/math7050384
Chicago/Turabian StyleLuan, Fei, Zongyan Cai, Shuqiang Wu, Tianhua Jiang, Fukang Li, and Jia Yang. 2019. "Improved Whale Algorithm for Solving the Flexible Job Shop Scheduling Problem" Mathematics 7, no. 5: 384. https://doi.org/10.3390/math7050384
APA StyleLuan, F., Cai, Z., Wu, S., Jiang, T., Li, F., & Yang, J. (2019). Improved Whale Algorithm for Solving the Flexible Job Shop Scheduling Problem. Mathematics, 7(5), 384. https://doi.org/10.3390/math7050384