A Unifying Numerical Framework for the “Small-Slope” Based Core-Annular Flow Instability Models

 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
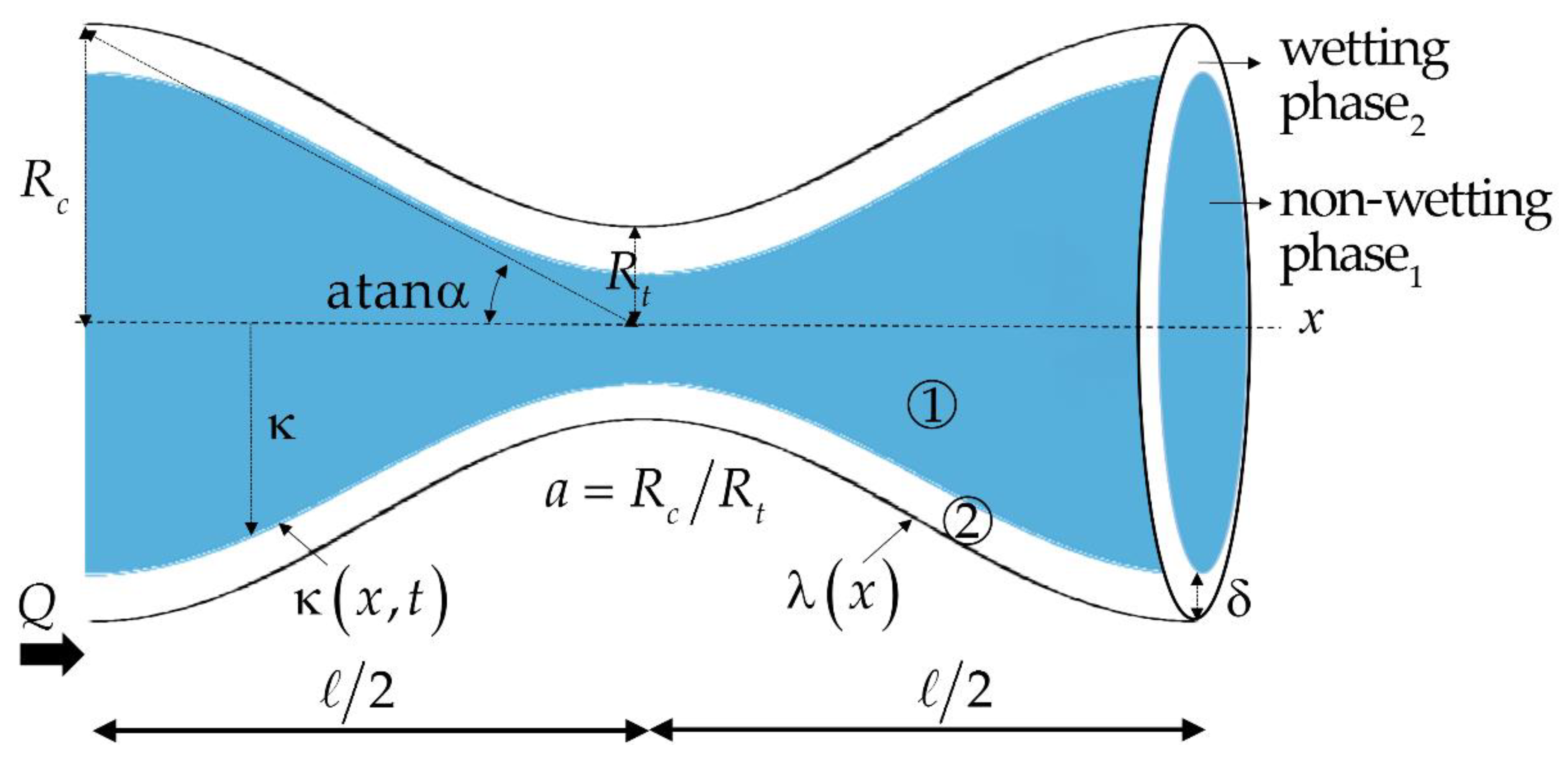
2.1. Geometry of the Problem
2.2. Governing Equations
2.3. Drop and Bubble Snap-Off Models
2.3.1. General Considerations for the Derivation of Models
2.3.2. Inviscid Core Fluid Models
2.3.3. Viscous Core Fluid Models
2.4. Initial and Boundary Conditions
2.4.1. Initial Conditions
2.4.2. Boundary Conditions
2.5. Numerical Procedures
Fourier-Based Pseudo-Spectral (FPS) Differentiation Method
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Peña, T.; Carvalho, M.; Alvarado, V. Snap-off of a liquid drop immersed in another liquid flowing through a constricted capillary. Alche J. 2009, 55, 1993–1999. [Google Scholar] [CrossRef]
- Deng, W.; Cardenas, M.B.; Bennett, P.C. Extended Roof snap-off for a continuous nonwetting fluid and an example case for supercritical CO2. Adv. Water Resour. 2014, 64, 34–46. [Google Scholar] [CrossRef]
- Tsai, T.; Miksis, M.J. Dynamics of a drop in a constricted capillary tube. J. Fluid Mech. 1994, 274, 197–217. [Google Scholar] [CrossRef]
- Kouris, C.; Tsamopoulos, J. Core-annular flow in a periodically constricted circular tube. Part 2. Nonlinear dynamics. J. Fluid Mech. 2002, 470, 181–222. [Google Scholar] [CrossRef]
- Armstrong, R.; Berg, S.; Dinariev, O.; Evseev, N.; Klemin, D.; Koroteev, D.; Safonov, S. Modeling of pore-scale two-phase phenomena using density functional hydrodynamics. Transp. Porous Med. 2016, 112, 577–607. [Google Scholar] [CrossRef]
- Roman, S.; Abu-Al-Saud, M.O.; Tokunaga, T.; Wan, J.; Kovscek, A.R.; Tchelepi, H.A. Measurements and simulation of liquid films during drainage displacements and snap-off in constricted capillary tubes. J. Colloid Interface Sci. 2017, 507, 279–289. [Google Scholar] [CrossRef] [Green Version]
- Starnoni, M.; Pokrajac, D. Numerical study of the effects of contact angle and viscosity ratio on the dynamics of snap-off through porous media. Adv. Water Resour. 2018, 111, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Meng, Y.; Li, X.; He, M.; Jiang, M. A semi-analytical model research of liquid collar shape and coalescence in pore throat during snap-off. Arab. J. Geosci. 2019, 12, 468. [Google Scholar] [CrossRef]
- Gauglitz, P.; Radke, C. An extended evolution equation for liquid film breakup in cylindrical capillaries. Chem. Eng. Sci. 1988, 43, 1457–1465. [Google Scholar] [CrossRef]
- Gauglitz, P.; Radke, C. The dynamics of liquid film breakup in constricted cylindrical capillaries. J. Colloid Interface Sci. 1990, 134, 14–40. [Google Scholar] [CrossRef]
- Middleman, S. Modeling Axisymmetric Flows: Dynamics of Films, Jets, and Drops; Academic Press: San Diego, CA, USA, 1995. [Google Scholar]
- Hammond, P. Nonlinear adjustment of a thin annular film of viscous fluid surrounding a thread of another within a circular cylindrical pipe. J. Fluid Mech. 1983, 137, 363–384. [Google Scholar] [CrossRef]
- Zhang, H.; Nikolov, A.; Feng, J.; Wasan, D. The dynamics of the annular liquid layer inside a cylindrical capillary. Phys. Fluids 2016, 28, 024107. [Google Scholar] [CrossRef]
- Skeel, R.D.; Berzins, M. A method for the spatial discretization of parabolic equations in one space variable. Siam J. Sci. Stat. Comput. 1990, 11, 1–32. [Google Scholar] [CrossRef]
- Shampine, L.F.; Reichelt, M.W. The matlab ode suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Hoyer, P.; Alvarado, V.; Carvalho, M. Snap-off in constricted capillary with elastic interface. Phys. Fluids 2016, 28, 012104. [Google Scholar] [CrossRef]
- Beresnev, I.; Deng, W. Theory of breakup of core fluids surrounded by a wetting annulus in sinusoidally constricted capillary channels. Phys. Fluids 2010, 22, 012105. [Google Scholar] [CrossRef]
- Knapp, R. A Method of Lines Framework in Mathematica1. JNAIAM 2008, 3, 43–59. [Google Scholar]
- Bretherton, F. The motion of long bubbles in tubes. J. Fluid Mech. 1961, 10, 166–188. [Google Scholar] [CrossRef]
- Beresnev, I.; Gaul, W.; Vigil, R.D. Thickness of residual wetting film in liquid-liquid displacement. Phys. Rev. E 2011, 84, 026327. [Google Scholar] [CrossRef] [Green Version]
- Deng, W.; Balhoff, M.; Cardenas, M.B. Influence of dynamic factors on nonwetting fluid snap-off in pores. Water Resour. Res. 2015, 51, 9182–9189. [Google Scholar] [CrossRef]
- Trefethen, L.N. Spectral Methods in Matlab; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
- Weideman, J.A.; Reddy, S.C. A MATLAB differentiation matrix suite. ACM Trans. Math. Softw. 2000, 26, 465–519. [Google Scholar] [CrossRef] [Green Version]
- Cooley, J.W.; Tukey, J.W. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Csáti, Z. Fourier Differentiation. Available online: http://www.mathworks.com/matlabcentral/fileexchange (accessed on 15 August 2020).
- Hoyer, P.; Alvarado, V. Stability of liquid bridges with elastic interface. RSC Adv. 2017, 7, 49344–49352. [Google Scholar] [CrossRef] [Green Version]
- Beresnev, I.; Gaul, W.; Vigil, R.D. Forced instability of core-annular flow in capillary constrictions. Phys. Fluids 2011, 23, 072105. [Google Scholar] [CrossRef] [Green Version]
- Gauglitz, P.; St. Laurent, C.; Radke, C. Experimental determination of gas-bubble breakup in a constricted cylindrical capillary. Ind. Eng. Chem. Res. 1988, 27, 1282–1291. [Google Scholar] [CrossRef]



 and FPS
and FPS  methods for the HAC model (gas–liquid elastic interface). The results correspond to case: , , (a) (b) .
and FPS methods for the HAC model (gas–liquid elastic interface). The results correspond to case: , , (a) (b) .
methods for the HAC model (gas–liquid elastic interface). The results correspond to case: , , (a) (b) .
and FPS methods for the HAC model (gas–liquid elastic interface). The results correspond to case: , , (a) (b) .
 ) and FPS (
) and FPS (  ) methods where , , and
) methods where , , and  ;
;  ;
;  ;
;  .
) and FPS ( ) methods where , , and ; ; ; .
.
) and FPS ( ) methods where , , and ; ; ; .
 ) and FPS (
) and FPS (  ) methods for the Gauglitz and Radke (GR) model are compared. The results shown correspond to: , and at different unidimensional times:
) methods for the Gauglitz and Radke (GR) model are compared. The results shown correspond to: , and at different unidimensional times:  ;
;  ;
;  .
) and FPS ( ) methods for the Gauglitz and Radke (GR) model are compared. The results shown correspond to: , and at different unidimensional times: ; ; .
.
) and FPS ( ) methods for the Gauglitz and Radke (GR) model are compared. The results shown correspond to: , and at different unidimensional times: ; ; .
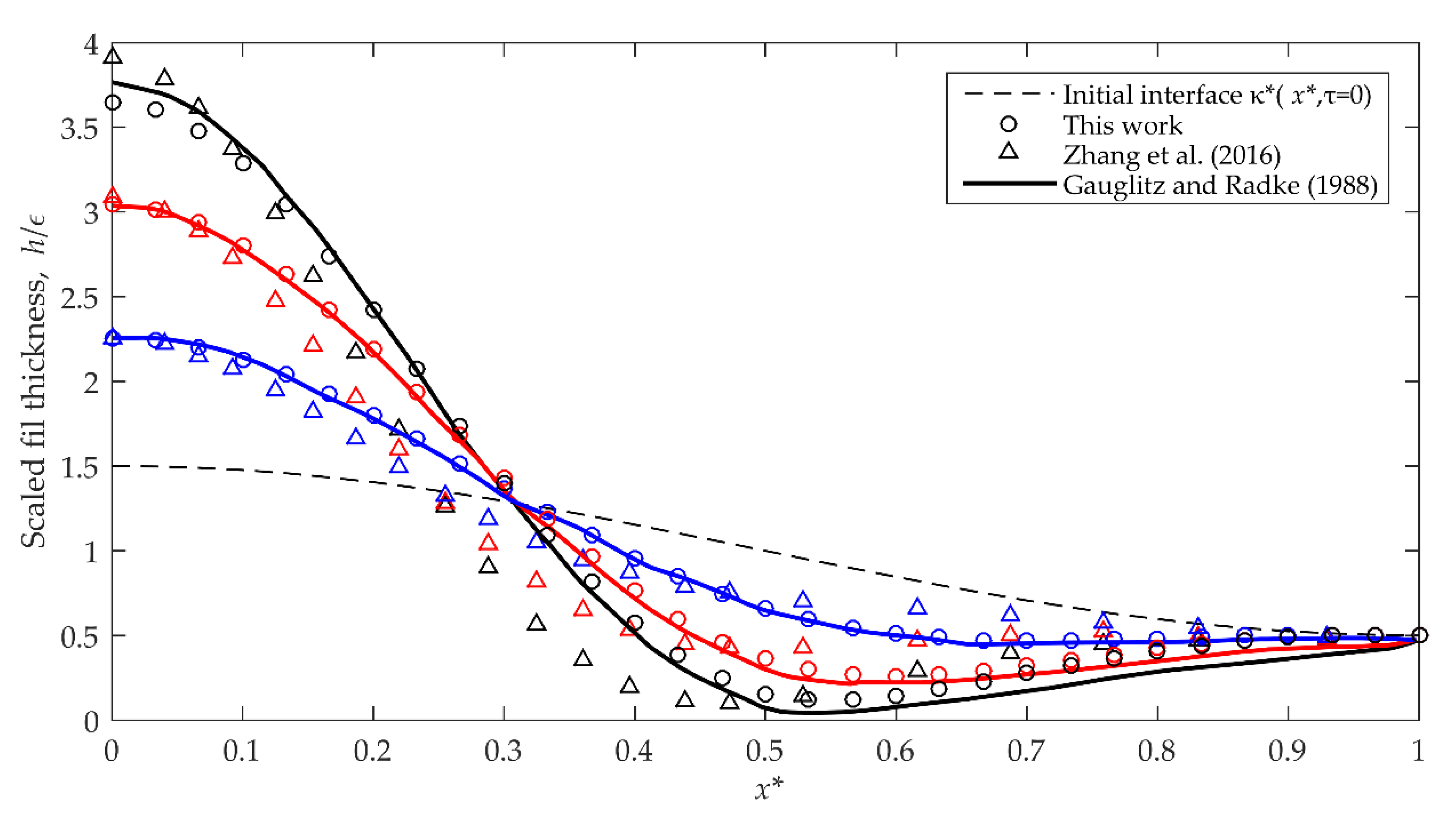
 ) and its comparison with those reported by Gauglitz and Radke (1988) with Galerkin-FE (
) and its comparison with those reported by Gauglitz and Radke (1988) with Galerkin-FE (  ) and Zhang et al. (2016) with MATLAB solver (
) and Zhang et al. (2016) with MATLAB solver (  ), for and . The profiles are shown for:
), for and . The profiles are shown for:  ;
;  ;
;  .
) and its comparison with those reported by Gauglitz and Radke (1988) with Galerkin-FE ( ) and Zhang et al. (2016) with MATLAB solver ( ), for and . The profiles are shown for: ; ; .
.
) and its comparison with those reported by Gauglitz and Radke (1988) with Galerkin-FE ( ) and Zhang et al. (2016) with MATLAB solver ( ), for and . The profiles are shown for: ; ; .
 ) and the FPS (
) and the FPS (  ) methods. The results correspond to the simulations performed with , , , and the geometric slopes:
) methods. The results correspond to the simulations performed with , , , and the geometric slopes:  ;
;  ;
;  .
) and the FPS ( ) methods. The results correspond to the simulations performed with , , , and the geometric slopes: ; ; .
.
) and the FPS ( ) methods. The results correspond to the simulations performed with , , , and the geometric slopes: ; ; .
 ) and the FPS (
) and the FPS (  ) methods. The results correspond to the simulations performed with , and
) methods. The results correspond to the simulations performed with , and  ; , and
; , and  . In both cases, and .
) and the FPS ( ) methods. The results correspond to the simulations performed with , and ; , and . In both cases, and .
. In both cases, and .
) and the FPS ( ) methods. The results correspond to the simulations performed with , and ; , and . In both cases, and .
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quevedo, A.; Fuentes, C.; Chávez, C.; González-Sosa, E.; Mota, C. A Unifying Numerical Framework for the “Small-Slope” Based Core-Annular Flow Instability Models. Mathematics 2020, 8, 1941. https://doi.org/10.3390/math8111941
Quevedo A, Fuentes C, Chávez C, González-Sosa E, Mota C. A Unifying Numerical Framework for the “Small-Slope” Based Core-Annular Flow Instability Models. Mathematics. 2020; 8(11):1941. https://doi.org/10.3390/math8111941
Chicago/Turabian StyleQuevedo, Antonio, Carlos Fuentes, Carlos Chávez, Enrique González-Sosa, and Carlos Mota. 2020. "A Unifying Numerical Framework for the “Small-Slope” Based Core-Annular Flow Instability Models" Mathematics 8, no. 11: 1941. https://doi.org/10.3390/math8111941
APA StyleQuevedo, A., Fuentes, C., Chávez, C., González-Sosa, E., & Mota, C. (2020). A Unifying Numerical Framework for the “Small-Slope” Based Core-Annular Flow Instability Models. Mathematics, 8(11), 1941. https://doi.org/10.3390/math8111941