Multi-Objective Evolutionary Algorithms to Find Community Structures in Large Networks


 , , and
, , and 
Abstract
:1. Introduction
2. Multi-Objective Community Detection: An Overview
3. Problem Formulation
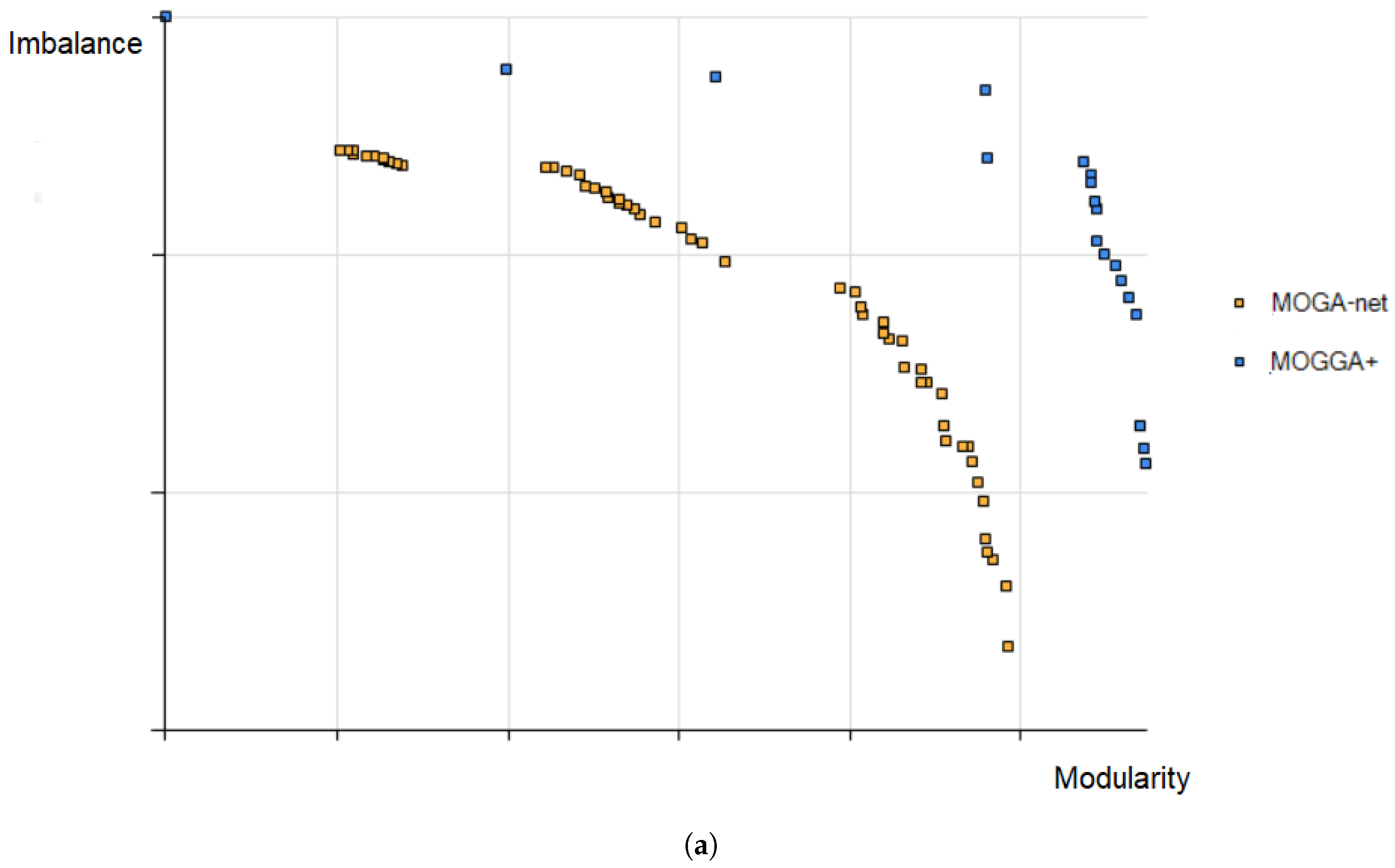
- Modularity (Q) [2]: Modularity considers that a solution is good if there are many edges within communities and only a few between them. A solution with a Q value close to 1 indicates strong community structure from a topological perspective [30].where M is the number of edges, and are the degrees of two given nodes of the network (i and j), is the element of the adjacency matrix that is located in the ith row and the jth column, and indicates if node i and node j are in the same community () or not (). The aim is, therefore, to maximize the modularity (Q) value.
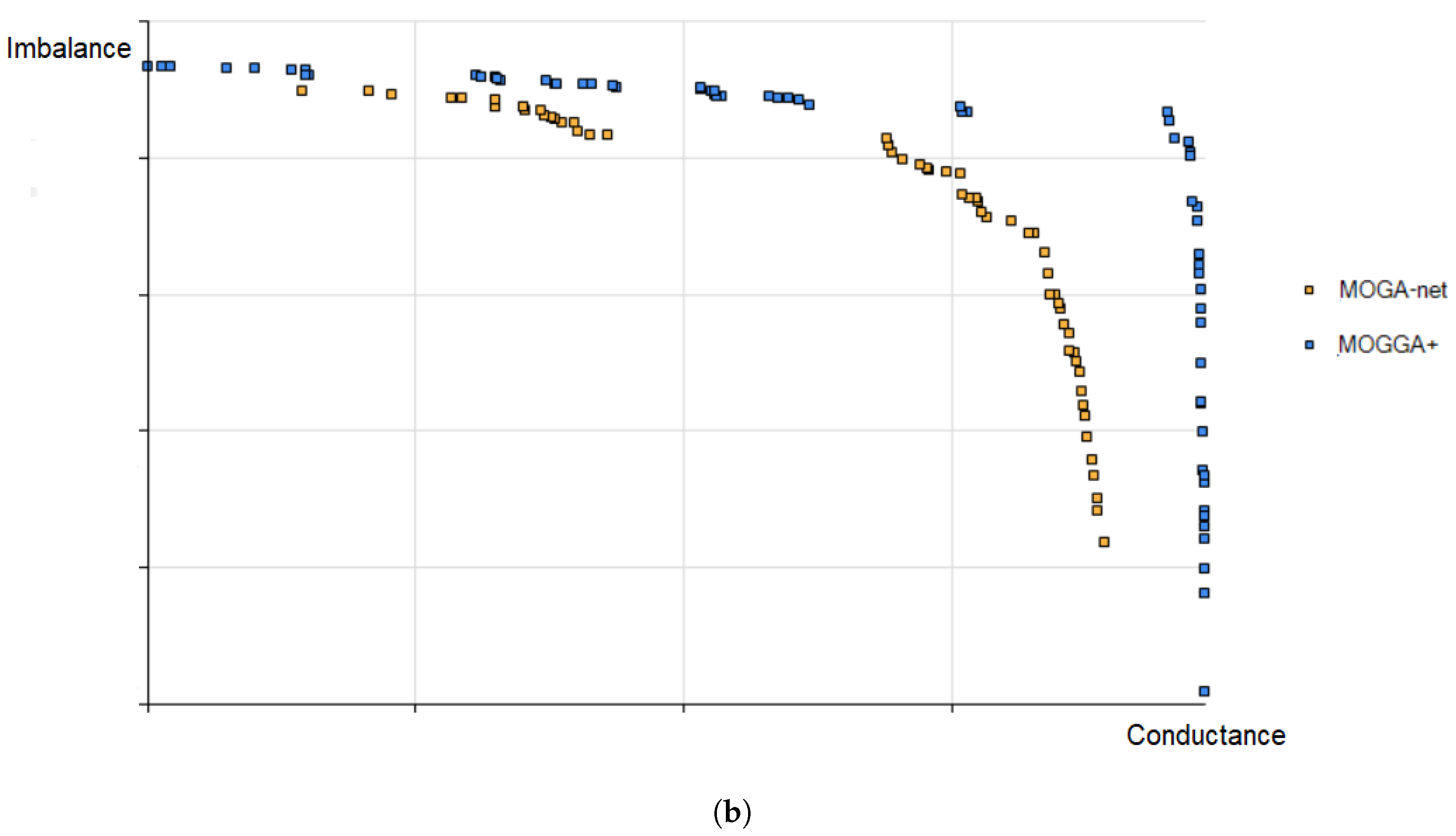
- Conductance (CON) [39,40]: Conductance is a measure of the fraction of total edge volume that points outside the community. The aim here is to minimize the conductance (CON) value.where is the number of edges of the ith community that are linked to nodes from other communities, is the number of edges of the ith community that are not linked to nodes from other communities, and N is the number of communities considered.
- Imbalance (IMB): Imbalance represents the difference in the number of nodes included in the communities detected. The aim is, therefore, to minimize the imbalance value.where is the number of nodes of the ith community, is the number of nodes of the network divided by the number of communities considered, and N is the number of communities considered.
4. Multi-Objective Generational Genetic Algorithm: MOGGA+
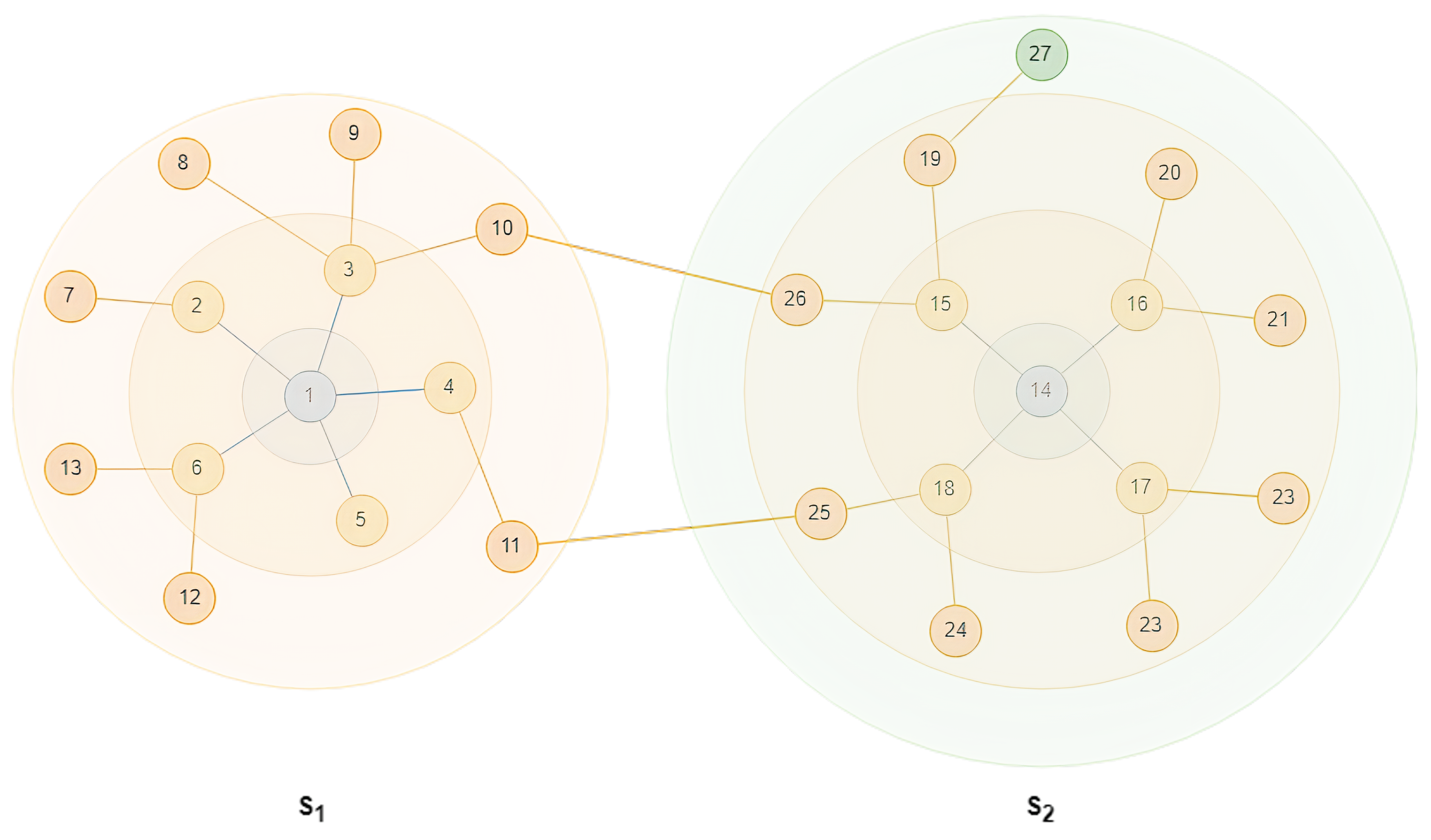
4.1. Genetic Representation
4.2. Initialisation of the Population
4.3. Migration Vector and Genetic Operators
4.3.1. Mutation Operator
- Migration of a boundary node to the best destination community (M1): moves boundary node j located at community to the best neighbouring community [6].
- Migration of N nodes to the best destination community (M2): moves boundary node j located at community to the best destination community . Furthermore, a random number of neighbouring nodes of node j are also moved to community .
- Migration of N nodes to a random destination community (M3): moves boundary node j located at community to a random destination community . Furthermore, a random number of neighbouring nodes of node j are also moved to community .
4.3.2. Crossover Operator
- Best exchange of boundary nodes (EX1): moves boundary node j located at community to the best neighbouring community , and then moves from to the node k which obtains the best result from moving to the community.
- Random exchange of boundary nodes (EX2): moves the boundary node j located at the community to a random community , and then moves from to the node k that gets the best result from moving to the community.
4.3.3. Selection Operator
- : minimum number of individuals to replace;
- : maximum number of individuals to replace;
- : parameter that dynamically increases the number of individuals to replace, that is, the algorithm becomes more elistist when the number of generations performed increases. Let be the number of generations that the population will evolve; then, the value of is calculated as follows: = ()/.
4.4. Termination Criteria
5. Empirical Study
5.1. Algorithms
5.2. Test Problems
5.3. Parameter Settings
5.4. Performance Metrics
5.5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arumugam, S.; Brandstädt, A.; Nishizeki, T. Handbook of Graph Theory, Combinatorial Optimization, and Algorithms; Chapman and Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Newman, M.E.; Girvan, M. Finding and evaluating community structure in networks. Phys. Rev. E 2004, 69, 026113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shang, R.; Luo, S.; Zhang, W.; Stolkin, R.; Jiao, L. A multiobjective evolutionary algorithm to find community structures based on affinity propagation. Phys. A Stat. Mech. Appl. 2016, 453, 203–227. [Google Scholar] [CrossRef] [Green Version]
- Sun, P.G. Imbalance problem in community detection. Phys. A Stat. Mech. Appl. 2016, 457, 364–376. [Google Scholar] [CrossRef]
- Sun, P.G.; Sun, X. Complete graph model for community detection. Phys. A Stat. Mech. Appl. 2017, 471, 88–97. [Google Scholar] [CrossRef]
- Guerrero, M.; Montoya, F.G.; Baños, R.; Alcayde, A.; Gil, C. Adaptive community detection in complex networks using genetic algorithms. Neurocomputing 2017, 266, 101–113. [Google Scholar] [CrossRef]
- Wang, L.; Ng, A.H.; Deb, K. Multi-Objective Evolutionary Optimisation for Product Design and Manufacturing; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Gil, C.; Ortega, J.; Montoya, M.; Baños, R. A mixed heuristic for circuit partitioning. Comput. Optim. Appl. 2002, 23, 321–340. [Google Scholar] [CrossRef]
- Tripathy, B. De-Anonymization Techniques for Social Networks; Academic Press an Imprint of Elsevier: London, UK, 2019. [Google Scholar]
- Newman, M.E. Communities, modules and large-scale structure in networks. Nat. Phys. 2012, 8, 25–31. [Google Scholar] [CrossRef]
- Rossi, F.; Villa-Vialaneix, N. Optimizing an organized modularity measure for topographic graph clustering: A deterministic annealing approach. Neurocomputing 2010, 73, 1142–1163. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.S.; Zhang, S.; Wang, Y.; Zhang, X.S.; Chen, L. Clustering complex networks and biological networks by nonnegative matrix factorization with various similarity measures. Neurocomputing 2008, 72, 134–141. [Google Scholar] [CrossRef]
- Brandes, U.; Delling, D.; Gaertler, M.; Gorke, R.; Hoefer, M.; Nikoloski, Z.; Wagner, D. On modularity clustering. IEEE Trans. Knowl. Data Eng. 2008, 20, 172–188. [Google Scholar] [CrossRef] [Green Version]
- Garey, M.R.; Johnson, D.S. Computers and Intractability: A Guide to the Theory of NP-Completeness; W. H. Freeman & Co.: New York, NY, USA, 1979. [Google Scholar]
- Emmerich, M.T.; Deutz, A.H. A tutorial on multiobjective optimization: Fundamentals and evolutionary methods. Nat. Comput. 2018, 17, 585–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Coello, C.A.C.; Lamont, G.B.; Van Veldhuizen, D.A. Evolutionary Algorithms for Solving Multi-Objective Problems; Springer: Berlin/Heidelberg, Germany, 2007; Volume 5. [Google Scholar]
- Baños, R.; Gil, C.; Paechter, B.; Ortega, J. A hybrid meta-heuristic for multi-objective optimization: MOSATS. J. Math. Model. Algorithms 2007, 6, 213–230. [Google Scholar] [CrossRef]
- Pizzuti, C. A multiobjective genetic algorithm to find communities in complex networks. IEEE Trans. Evol. Comput. 2011, 16, 418–430. [Google Scholar] [CrossRef]
- Gong, M.; Ma, L.; Zhang, Q.; Jiao, L. Community detection in networks by using multiobjective evolutionary algorithm with decomposition. Phys. A Stat. Mech. Appl. 2012, 391, 4050–4060. [Google Scholar] [CrossRef]
- Shi, C.; Yan, Z.; Cai, Y.; Wu, B. Multi-objective community detection in complex networks. Appl. Soft Comput. 2012, 12, 850–859. [Google Scholar] [CrossRef]
- Bara’a, A.A.; Khoder, H.S. A new multi-objective evolutionary framework for community mining in dynamic social networks. Swarm Evol. Comput. 2016, 31, 90–109. [Google Scholar]
- Hariz, W.A.; Abdulhalim, M.F. Improving the performance of evolutionary multi-objective co-clustering models for community detection in complex social networks. Swarm Evol. Comput. 2016, 26, 137–156. [Google Scholar]
- Amiri, B.; Hossain, L.; Crawford, J.W.; Wigand, R.T. Community detection in complex networks: Multi–objective enhanced firefly algorithm. Knowl.-Based Syst. 2013, 46, 1–11. [Google Scholar] [CrossRef]
- Niu, X.; Si, W.; Wu, C.Q. A label-based evolutionary computing approach to dynamic community detection. Comput. Commun. 2017, 108, 110–122. [Google Scholar] [CrossRef]
- Bello-Orgaz, G.; Salcedo-Sanz, S.; Camacho, D. A multi-objective genetic algorithm for overlapping community detection based on edge encoding. Inf. Sci. 2018, 462, 290–314. [Google Scholar] [CrossRef]
- Zou, F.; Chen, D.; Huang, D.S.; Lu, R.; Wang, X. Inverse modelling-based multi-objective evolutionary algorithm with decomposition for community detection in complex networks. Phys. A Stat. Mech. Appl. 2019, 513, 662–674. [Google Scholar] [CrossRef]
- Gong, M.; Cai, Q.; Chen, X.; Ma, L. Complex network clustering by multiobjective discrete particle swarm optimization based on decomposition. IEEE Trans. Evol. Comput. 2013, 18, 82–97. [Google Scholar] [CrossRef]
- Rahimi, S.; Abdollahpouri, A.; Moradi, P. A multi-objective particle swarm optimization algorithm for community detection in complex networks. Swarm Evol. Comput. 2018, 39, 297–309. [Google Scholar] [CrossRef]
- Gong, M.; Chen, X.; Ma, L.; Zhang, Q.; Jiao, L. Identification of multi-resolution network structures with multi-objective immune algorithm. Appl. Soft Comput. 2013, 13, 1705–1717. [Google Scholar] [CrossRef]
- Reihanian, A.; Feizi-Derakhshi, M.R.; Aghdasi, H.S. Community detection in social networks with node attributes based on multi-objective biogeography based optimization. Eng. Appl. Artif. Intell. 2017, 62, 51–67. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, Y.; Li, B.; Sun, G. Multiobjective biogeography based optimization algorithm with decomposition for community detection in dynamic networks. Phys. A Stat. Mech. Appl. 2015, 436, 430–442. [Google Scholar] [CrossRef]
- Chen, D.; Zou, F.; Lu, R.; Yu, L.; Li, Z.; Wang, J. Multi-objective optimization of community detection using discrete teaching-learning-based optimization with decomposition. Inf. Sci. 2016, 369, 402–418. [Google Scholar] [CrossRef]
- Wu, P.; Pan, L. Multi-objective community detection method by integrating users’ behavior attributes. Neurocomputing 2016, 210, 13–25. [Google Scholar] [CrossRef]
- Moayedikia, A. Multi-objective community detection algorithm with node importance analysis in attributed networks. Appl. Soft Comput. 2018, 67, 434–451. [Google Scholar] [CrossRef]
- Cheng, F.; Cui, T.; Su, Y.; Niu, Y.; Zhang, X. A local information based multi-objective evolutionary algorithm for community detection in complex networks. Appl. Soft Comput. 2018, 69, 357–367. [Google Scholar] [CrossRef]
- Osaba, E.; Del Ser, J.; Camacho, D.; Bilbao, M.N.; Yang, X.S. Community detection in networks using bio-inspired optimization: Latest developments, new results and perspectives with a selection of recent meta-heuristics. Appl. Soft Comput. 2020, 87, 106010. [Google Scholar] [CrossRef]
- Li, Q.; Cao, Z.; Ding, W.; Li, Q. A multi-objective adaptive evolutionary algorithm to extract communities in networks. Swarm Evol. Comput. 2020, 52, 100629. [Google Scholar] [CrossRef]
- Wagenseller, P.; Wang, F.; Wu, W. Size matters: A comparative analysis of community detection algorithms. IEEE Trans. Comput. Soc. Syst. 2018, 5, 951–960. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Zhang, H.; Zhang, Y. Overlapping community detection based on conductance optimization in large-scale networks. Phys. A Stat. Mech. Appl. 2019, 522, 69–79. [Google Scholar] [CrossRef]
- Pattanayak, H.S.; Sangal, A.L.; Verma, H.K. Community detection in social networks based on fire propagation. Swarm Evol. Comput. 2019, 44, 31–48. [Google Scholar] [CrossRef]
- Pizzuti, C. Ga-net: A genetic algorithm for community detection in social networks. In Parallel Problem Solving from Nature–PPSN X; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1081–1090. [Google Scholar]
- He, D.; Wang, Z.; Yang, B.; Zhou, C. Genetic algorithm with ensemble learning for detecting community structure in complex networks. In Proceedings of the 2009 Fourth International Conference on Computer Sciences and Convergence Information Technology, Seoul, Korea, 24–26 November 2009; pp. 702–707. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.; Song, M. A genetic algorithm for clustering problems. In Proceedings of the Third Annual Conference on Genetic Programming, San Francisco, CA, USA, 22–25 July 1998; Volume 1998, pp. 568–575. [Google Scholar]
- Guerrero, M.; Montoya, F.G.; Baños, R.; Alcayde, A.; Gil, C. Community detection in national-scale high voltage transmission networks using genetic algorithms. Adv. Eng. Inform. 2018, 38, 232–241. [Google Scholar] [CrossRef]
- Bosman, P.A.; Thierens, D. The balance between proximity and diversity in multiobjective evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Menchaca-Mendez, A.; Coello, C.A.C. Selection mechanisms based on the maximin fitness function to solve multi-objective optimization problems. Inf. Sci. 2016, 332, 131–152. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L.; Laumanns, M.; Fonseca, C.M.; Da Fonseca, V.G. Performance assessment of multiobjective optimizers: An analysis and review. IEEE Trans. Evol. Comput. 2003, 7, 117–132. [Google Scholar] [CrossRef] [Green Version]
- Schott, J.R. Fault Tolerant Design Using Single and Multicriteria Genetic Algorithm Optimization; Technical Report; Air Force Institute of Technology: Wright-Patterson Air Force Base, OH, USA, 1995. [Google Scholar]
- Taghavi, T.; Pimentel, A.D. Design metrics and visualization techniques for analyzing the performance of moeas in dse. In Proceedings of the 2011 International Conference on Embedded Computer Systems: Architectures, Modeling and Simulation, Samos, Greece, 18–21 July 2011; pp. 67–76. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Power Grid | Italy | Germany | France | Iberian Peninsula | Texas |
|---|---|---|---|---|---|
| Nodes | 352 | 438 | 904 | 1104 | 2007 |
| Edges | 462 | 662 | 1163 | 1416 | 2607 |
| Average degree | 2.63 | 3.03 | 2.57 | 2.57 | 2.60 |
| Network diameter | 39 | 21 | 28 | 40 | 39 |
| Population size (Psize) | 200 | |
| Generations (Gmax) | 200 | |
| Mutation probability (initial/min/max) | ||
| M1 | 0.35/0.20/0.60 | |
| M2 | 0.35/0.20/0.60 | |
| M3 | 0.30/0.20/0.60 | |
| Crossover probability (initial/min/max ) | ||
| EX1 | 0.50/0.20/0.80 | |
| EX2 | 0.50/0.20/0.80 | |
| Selection probability (minRatio/maxRatio) | 0.15/0.35 |
| Method | Hyper-Volume | Schott’s Spacing | |||
|---|---|---|---|---|---|
| Best | Mean | Best | Mean | ||
| Italy | MOGA-Net | 1.683 | 1.644 | 0.024 | 0.046 |
| MOGGA+ | 2.186 | 2.168 | 0.076 | 0.096 | |
| Germany | MOGA-Net | 1.667 | 1.594 | 0.022 | 0.061 |
| MOGGA+ | 2.166 | 2.156 | 0.060 | 0.093 | |
| France | MOGA-Net | 1.894 | 1.779 | 0.016 | 0.030 |
| MOGGA+ | 2.929 | 2.919 | 0.077 | 0.165 | |
| Iberian Peninsula | MOGA-Net | 1.533 | 1.426 | 0.124 | 0.010 |
| MOGGA+ | 2.578 | 2.546 | 0.168 | 0.018 | |
| Texas | MOGA-Net | 1.763 | 1.605 | 0.012 | 0.021 |
| MOGGA+ | 3.939 | 3.926 | 0.159 | 0.194 | |
| Method | Hyper-Volume | Schott’s Spacing | |||
|---|---|---|---|---|---|
| Best | Mean | Best | Mean | ||
| Italy | MOGA-Net | 5936.804 | 5723.398 | 0.120 | 0.254 |
| MOGGA+ | 6160.020 | 6160.020 | 66.202 | 66.202 | |
| Germany | MOGA-Net | 2680.895 | 2616.242 | 0.096 | 0.254 |
| MOGGA+ | 2831.827 | 2831.735 | 3.891 | 3.891 | |
| rance | MOGA-Net | 29984.032 | 28639.357 | 0.155 | 0.328 |
| MOGGA+ | 35615.731 | 35614.983 | 0.00 | 193.953 | |
| Iberian Peninsula | MOGA-Net | 43316.548 | 41260.761 | 0.154 | 0.421 |
| MOGGA+ | 53646.681 | 53646.653 | 6.584 | 7.992 | |
| Texas | MOGA-Net | 12556.285 | 11639.416 | 0.262 | 0.653 |
| MOGGA+ | 19685.936 | 19685.928 | 0.216 | 34.303 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerrero, M.; Gil, C.; Montoya, F.G.; Alcayde, A.; Baños, R. Multi-Objective Evolutionary Algorithms to Find Community Structures in Large Networks. Mathematics 2020, 8, 2048. https://doi.org/10.3390/math8112048
Guerrero M, Gil C, Montoya FG, Alcayde A, Baños R. Multi-Objective Evolutionary Algorithms to Find Community Structures in Large Networks. Mathematics. 2020; 8(11):2048. https://doi.org/10.3390/math8112048
Chicago/Turabian StyleGuerrero, Manuel, Consolación Gil, Francisco G. Montoya, Alfredo Alcayde, and Raúl Baños. 2020. "Multi-Objective Evolutionary Algorithms to Find Community Structures in Large Networks" Mathematics 8, no. 11: 2048. https://doi.org/10.3390/math8112048
APA StyleGuerrero, M., Gil, C., Montoya, F. G., Alcayde, A., & Baños, R. (2020). Multi-Objective Evolutionary Algorithms to Find Community Structures in Large Networks. Mathematics, 8(11), 2048. https://doi.org/10.3390/math8112048