Topology Optimization of Elastoplastic Behavior Conditions by Selectively Suppressing Plastic Work


Abstract
:1. Introduction
2. Formulations
2.1. Implicit Analysis of Global Equilibrium
2.2. Implicit Stress Integration
2.3. Consistent Tangent Modulus
2.4. Hardening Model and Material Parameters
2.5. Optimization
3. Problems and Results
4. Discussion
5. Conclusions
- (1)
- The optimization algorithm was combined with the nonlinear weak form of the finite element method.
- (2)
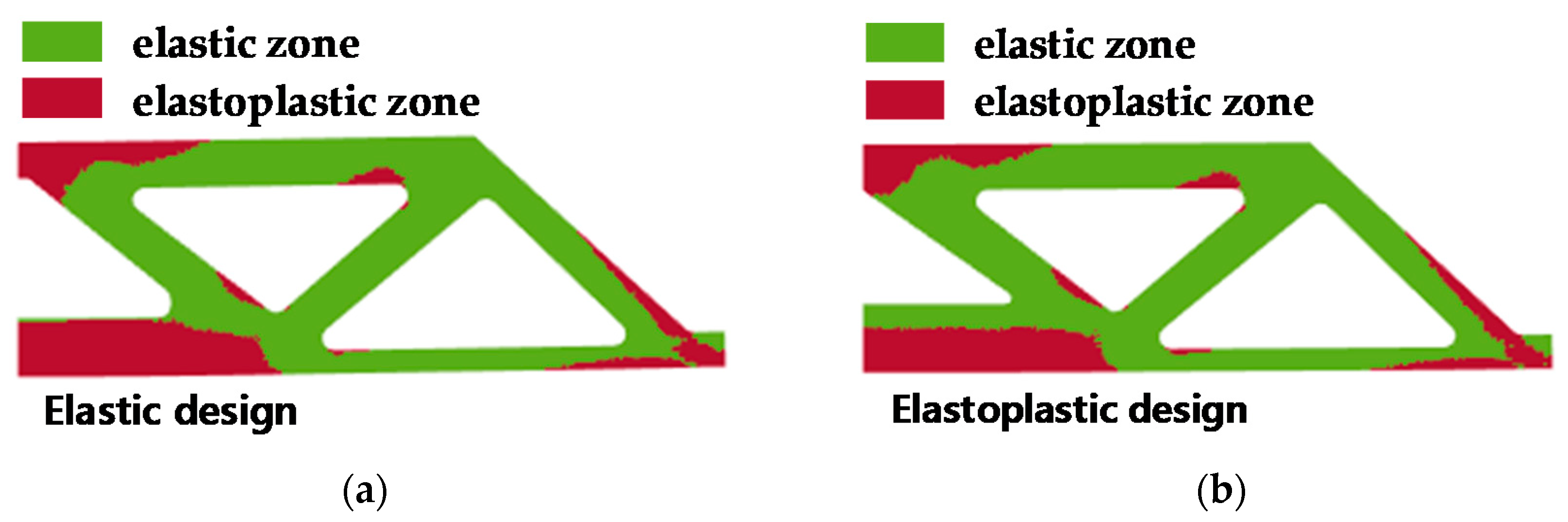
- In the objective function, plastic work was separated from stain energy and the separated plastic work was selectively applied according to a deformation mode. In elastic deformation areas, strain energy was minimized, as in general cases. In elastoplastic deformation areas, only the plastic work was minimized for the purpose of suppressing plastic deformation. This method is able to focus on suppressing plastic deformation in the elastoplastic deformation areas while still accounting for elastic stiffness in the elastic deformation areas.
- (3)
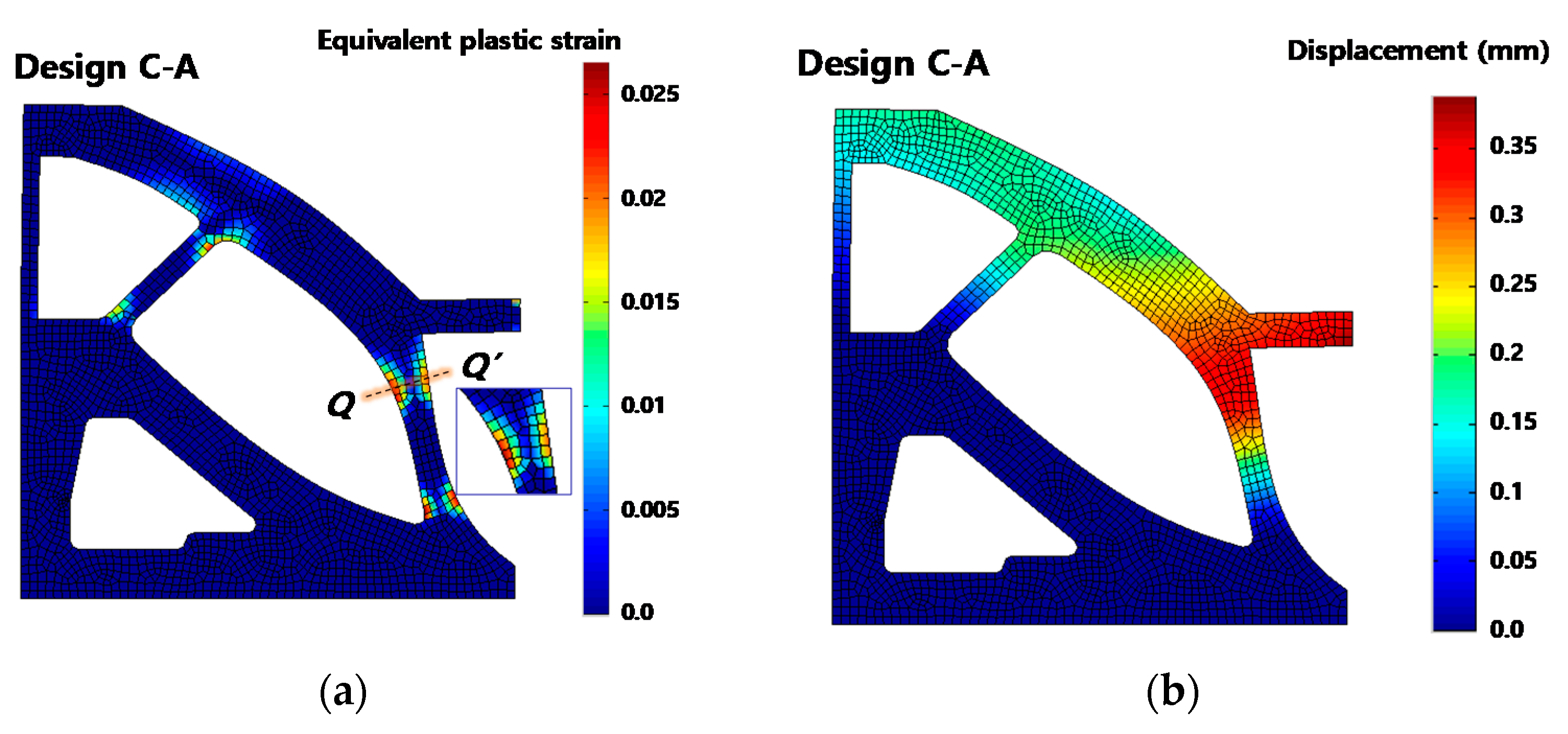
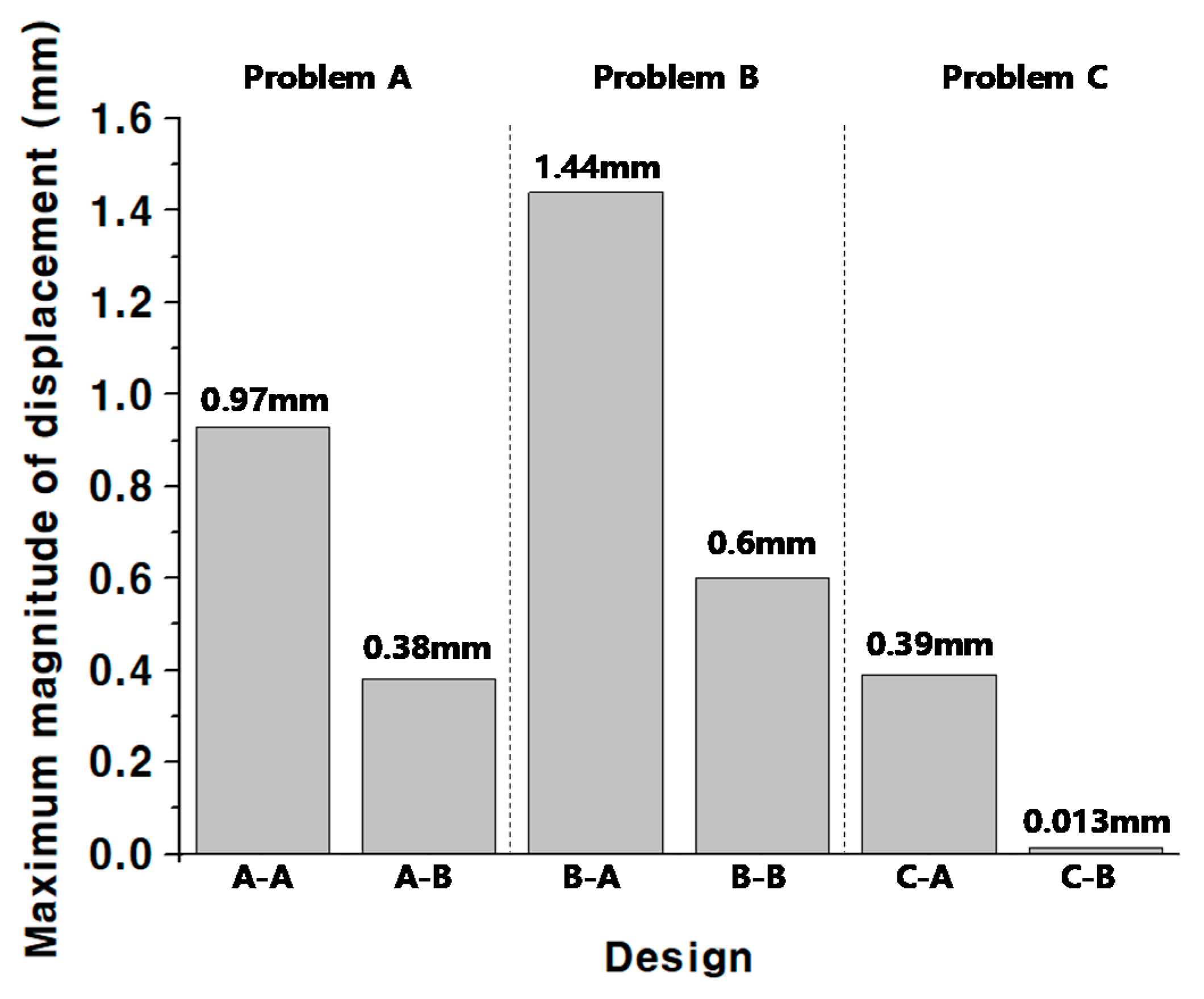
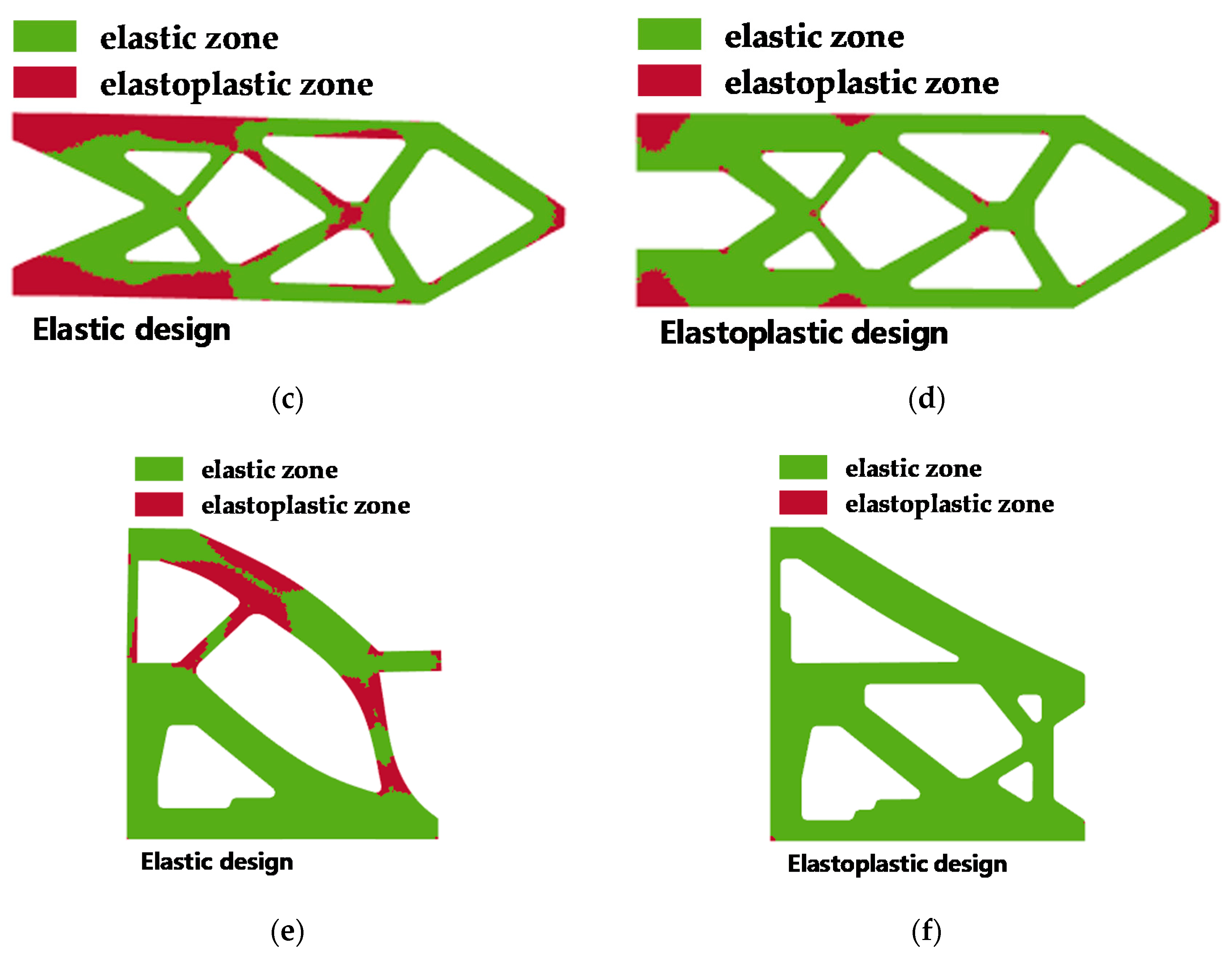
- The structures designed while considering elastoplastic deformation strengthened the areas where plastic deformation occurs. The reinforced structures drastically reduced plastic strain and the magnitude of displacement when compared to shapes designed with only elastic deformation.
- (4)
- The structures designed with elastoplastic deformation can delay the beginning of plastic deformation and reduce plastically dissipated energy in the structures. This reduction and delay of the plastic deforming can decrease chances of plastic collapse.
- (5)
- The time step and loading condition affects the stability of the optimization. It is recommended to use appropriate time step and loading condition in optimization processes.
Author Contributions
Funding
Conflicts of Interest
References
- Wu, Y.; Li, Q.; Hu, Q.; Borgart, A. Size and Topology Optimization for Trusses with Discrete Design Variables by Improved Firefly Algorithm. Math. Probl. Eng. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Xing, J.; Yang, Q.; Luo, Y. Design of Large-Displacement Compliant Mechanisms by Topology Optimization Incorporating Modified Additive Hyperelasticity Technique. Math. Probl. Eng. 2017, 2017, 1–11. [Google Scholar] [CrossRef]
- Hatamizadeh, A.; Song, Y.; Hopkins, J.B. Optimizing the Geometry of Flexture System Topologies Using the Boundary Learning Optimization Tool. Math. Probl. Eng. 2018, 2018, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Asadpoure, A.; Valdevit, L. Topology optimization of lightweight periodic lattices under simultaneous compressive and shear stiffness constraints. Int. J. Solids Struct. 2015, 60–61, 1–16. [Google Scholar] [CrossRef]
- Belhabib, S.; Guessasma, S. Compression performance of hollow structures: From topology optimization to design 3D printing. Int. J. Mech. Sci. 2017, 133, 728–739. [Google Scholar] [CrossRef]
- Bakhtiari-Shahri, M.; Moeenfard, H. Topology optimization of fundamental compliant mechanisms using a novel asymmetric beam flexture. Int. J. Mech. Sci. 2018, 135, 383–397. [Google Scholar] [CrossRef]
- Descamps, B.; Coelho, R.F. The nominal force method for truss geometry and topology optimization incorporating stability considerations. Int. J. Solids Struct. 2014, 51, 2390–2399. [Google Scholar] [CrossRef]
- Kook, J.; Jensen, J.S. Topology optimization of periodic microstructures for enhanced loss factor using acoustic-structure interaction. Int. J. Solids Struct. 2017, 122–123, 59–68. [Google Scholar] [CrossRef]
- Luo, Y.; Li, M.; Kang, Z. Topology optimization of hyperelastic structures with frictionless contact supports. Int. J. Solids Struct. 2016, 81, 373–382. [Google Scholar] [CrossRef]
- Tripathi, A.; Bajaj, A.K. Topology optimization and internal resonances in transverse vibrations of hyperelastic plates. Int. J. Solids Struct. 2016, 81, 311–328. [Google Scholar] [CrossRef]
- Penadés-Plà, V.; García-Segura, T.; Yepes, V. Robust Design Optimization for Low-Cost Concrete Box-Girder Bridge. Mathematics 2020, 8, 398. [Google Scholar] [CrossRef] [Green Version]
- Andreassen, E.; Clausen, A.; Schevenels, M.; Lazarov, B.S.; Sigmund, O. Efficient topology optimization in MATLAB using 88 lines of code. Struct. Multidiscip. Optim. 2011, 43, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Andreassen, E.; Lazarov, B.S.; Sigmund, O. Design of manufacturable 3D extremal elastic microstructure. Mech. Mater. 2014, 69, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Buhl, T.; Pedersen, C.B.W.; Sigmund, O. Stiffness design of geometrically nonlinear structures using topology optimization. Struct. Multidiscip. Optim. 2000, 19, 93–104. [Google Scholar] [CrossRef]
- Eschenauer, H.A.; Olhoff, N. Topology optimization of continuum structures: A review. Appl. Mech. Rev. 2001, 54, 331–390. [Google Scholar] [CrossRef]
- Petersson, J.; Sigmund, O. Slope constrained topology optimization. Int. J. Numer. Methods Eng. 1998, 41, 1417–1434. [Google Scholar] [CrossRef]
- Suzuki, K.; Kikuchi, N. A homogenization method for shape and topology optimization. Comput. Methods Appl. Mech. Eng. 1991, 93, 291–318. [Google Scholar] [CrossRef] [Green Version]
- Sigmund, O. A 99 line topology optimization code written in Matlab. Struct. Multidiscip. Optim. 2001, 21, 120–127. [Google Scholar] [CrossRef]
- Zhang, G.; Li, L.; Khandelwal, K. Topology optimization of structures with anisotropic plastic materials using enhanced assumed strain elements. Struct. Multidiscip. Optim. 2017, 55, 1965–1988. [Google Scholar] [CrossRef]
- Wallin, M.; Jönsson, V.; Wingren, E. Topology optimization based on finite strain plasticity. Struct. Multidiscip. Optim. 2016, 54, 783–793. [Google Scholar] [CrossRef]
- Schwarz, S.; Maute, K.; Ramm, E. Topology and shape optimization for elastoplastic structural response. Comput. Methods. Appl. Mech. Eng. 2001, 190, 2135–2155. [Google Scholar] [CrossRef]
- Blachowski, B.; Tauzowski, P.; Lógó, J. Yield limited optimal topology design of elastoplastic structures. Struct. Multidisc. Optim. 2020, 61, 1953–1976. [Google Scholar] [CrossRef]
- Herfelt, M.A.; Poulsen, P.N.; Hoang, L.C. Strength-based topology optimisation of plastic isotropic von Mises materials. Struct. Multidisc. Optim. 2019, 59, 893–906. [Google Scholar] [CrossRef] [Green Version]
- Alberdi, R.; Khandelwal, K. Topology optimization of pressure dependent elastoplastic energy absorbing structures with material damage constraints. Finite Elem. Anal. Des. 2017, 133, 42–61. [Google Scholar] [CrossRef]
- Huang, X.; Xie, Y.M.; Lu, G. Topology optimization of energy-absorbing structures. Int. J. Crashworthiness 2007, 12, 663–675. [Google Scholar] [CrossRef]
- Li, L.; Zhang, G.; Khandelwal, K. Topology optimization of energy absorbing structures with maximum damage constraint. Int. J. Numer. Methods Eng. 2017, 112, 737–775. [Google Scholar] [CrossRef]
- Li, L.; Zhang, G.; Khandelwal, K. Design of energy dissipating elastoplastic structures under cyclic loads using topology optimization. Struct. Multidiscip. Optim. 2017, 56, 391–412. [Google Scholar] [CrossRef]
- Barba, P.D.; Mognaschi, M.E.; Sieni, E. Many Objective Optimization of a Magnetic Micro-Electro-Mechanical (MEMS) Micromirror with Bounded MP-NSGA Algorithm. Mathematics 2020, 8, 1509. [Google Scholar] [CrossRef]
- Ziedan, H.A.; Rezk, H.; Al-Dhaifallah, M.; El-Zohri, E.H. Finite Element Solution of the Corona Discharge of Wire-Duct Electrostatic Precipitators at High Temperatures-Numerical Computation and Experimental Verification. Mathematics 2020, 8, 1406. [Google Scholar] [CrossRef]
- Bendsøe, M.P. Optimal shape design as a material distribution problem. Struct. Optim. 1989, 1, 193–202. [Google Scholar] [CrossRef]
- Mlejnek, H.P. Some aspects of the genesis of structures. Struct. Optim. 1992, 5, 64–69. [Google Scholar] [CrossRef]
- Bendsøe, M.P.; Sigmund, O. Material interpolation schemes in topology optimization. Arch. Appl. Mech. 1999, 69, 635–654. [Google Scholar] [CrossRef]
- Lee, E.H.; Yang, D.Y.; Yoon, J.W.; Yang, W.H. Numerical modeling and analysis for forming process of dual-phase 980 steel exposed to infrared local heating. Int. J. Solids Struct. 2015, 75–76, 211–224. [Google Scholar] [CrossRef]
- Yoon, J.W.; Yang, D.Y.; Chung, K. Elasto-plastic finite element method based on incremental deformation theory and continuum based shell elements for planar anisotropic sheet materials. Comput. Methods. Appl. Mech. Eng. 1999, 174, 23–56. [Google Scholar] [CrossRef]
- Hockett, J.E.; Sherby, O.D. Large strain deformation of polycrystalline metals at low homologous temperatures. J. Mech. Phys. Solids. 1975, 23, 87–98. [Google Scholar] [CrossRef]
- Lee, E.H.; Stoughton, T.B.; Yoon, J.W. A new strategy to describe nonlinear elastic and asymmetric plastic behaviors with one yield surface. Int. J. Plast. 2017, 98, 217–238. [Google Scholar] [CrossRef]
- Lee, E.H.; Choi, H.; Stoughton, T.B.; Yoon, J.W. Combined anisotropic and distortion hardening to describe directional response with Bauschinger effect. Int. J. Plast. 2019, 122, 73–88. [Google Scholar] [CrossRef]
- Lee, E.H.; Rubin, M.B. Modeling anisotropic inelastic effects in sheet metal forming using microstructual vectors–Part I: Theory. Int. J. Plast. 2020, 134, 102783. [Google Scholar] [CrossRef]
- Bendsøe, M.P. Optimization of Structural Topology: Shape and Material; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1995. [Google Scholar]
- Bruns, T.E.; Tortorelli, D.A. Topology optimization of non-linear elastic structures and compliant mechanisms. Comput. Methods. Appl. Mech. Eng. 2001, 190, 3443–3459. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters of the Modified Hockett–Sherby Model | ||||
|---|---|---|---|---|
| A (MPa) | B (MPa) | C | b | D (MPa) |
| 568.74 | 368.19 | 1.81 | 0.60 | 78.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, E.-H.; Kim, T.-H. Topology Optimization of Elastoplastic Behavior Conditions by Selectively Suppressing Plastic Work. Mathematics 2020, 8, 2062. https://doi.org/10.3390/math8112062
Lee E-H, Kim T-H. Topology Optimization of Elastoplastic Behavior Conditions by Selectively Suppressing Plastic Work. Mathematics. 2020; 8(11):2062. https://doi.org/10.3390/math8112062
Chicago/Turabian StyleLee, Eun-Ho, and Tae-Hyun Kim. 2020. "Topology Optimization of Elastoplastic Behavior Conditions by Selectively Suppressing Plastic Work" Mathematics 8, no. 11: 2062. https://doi.org/10.3390/math8112062
APA StyleLee, E. -H., & Kim, T. -H. (2020). Topology Optimization of Elastoplastic Behavior Conditions by Selectively Suppressing Plastic Work. Mathematics, 8(11), 2062. https://doi.org/10.3390/math8112062