Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Crossing Limit Cycles for Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points Separated by a Conic
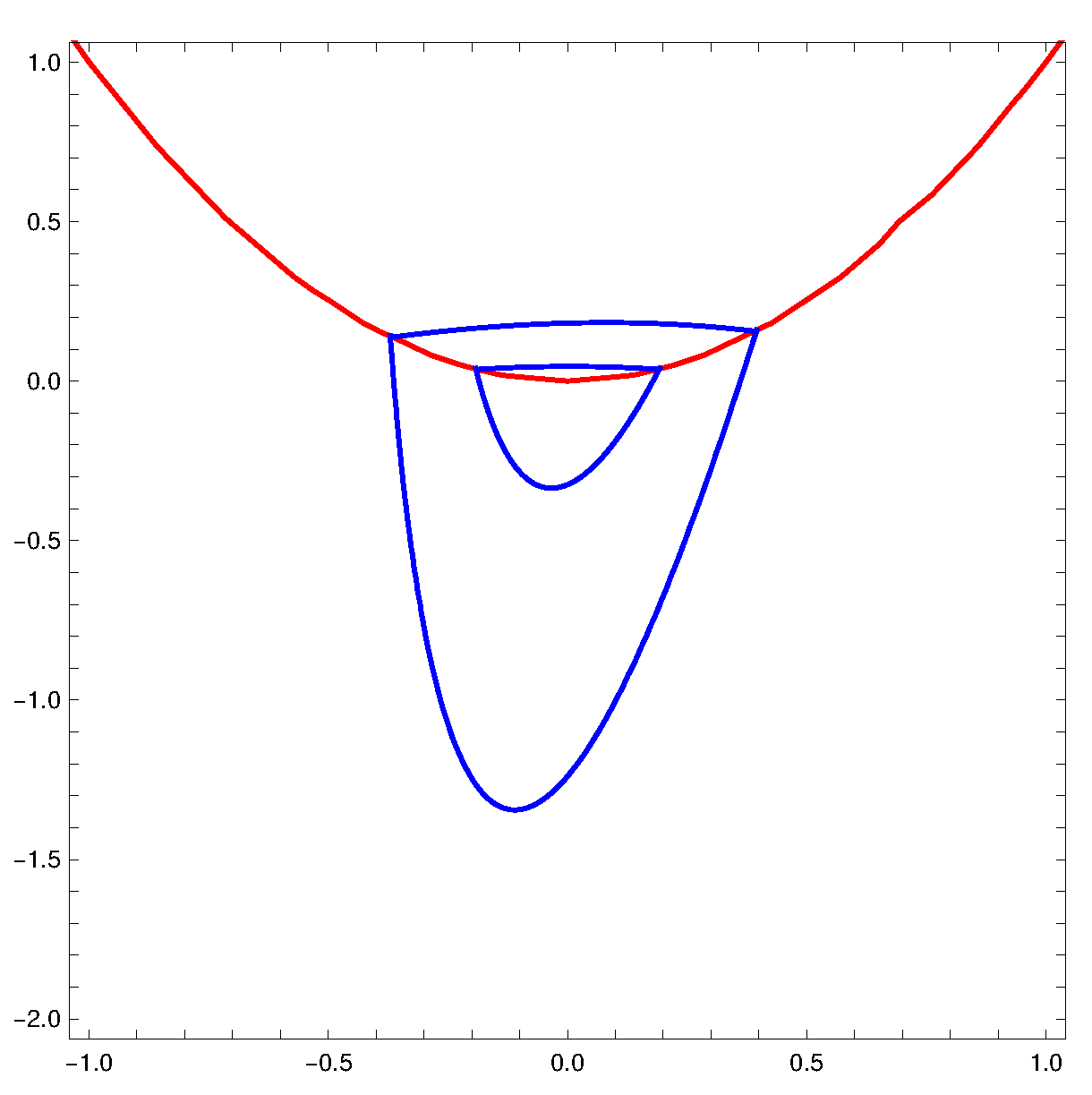
- (a)
- The maximum number of crossing limit cycles of PHS intersecting the parabolaPat two points is at most two, and this maximum is reached; see Figure 1.
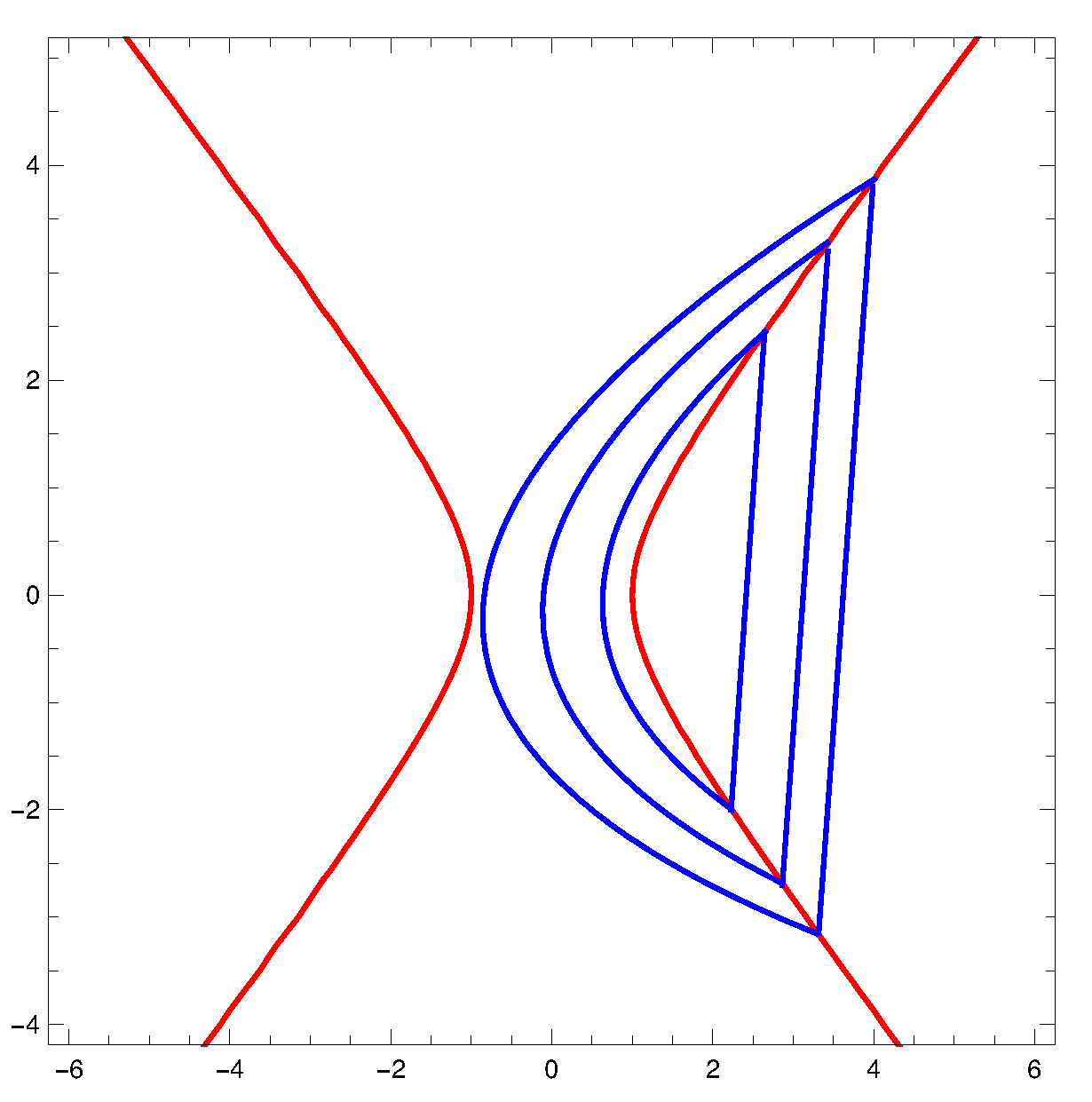
- (b)
- The maximum number of crossing limit cycles of PHS intersecting the hyperbolaHat two points is at most three, and this maximum is reached; see Figure 2.
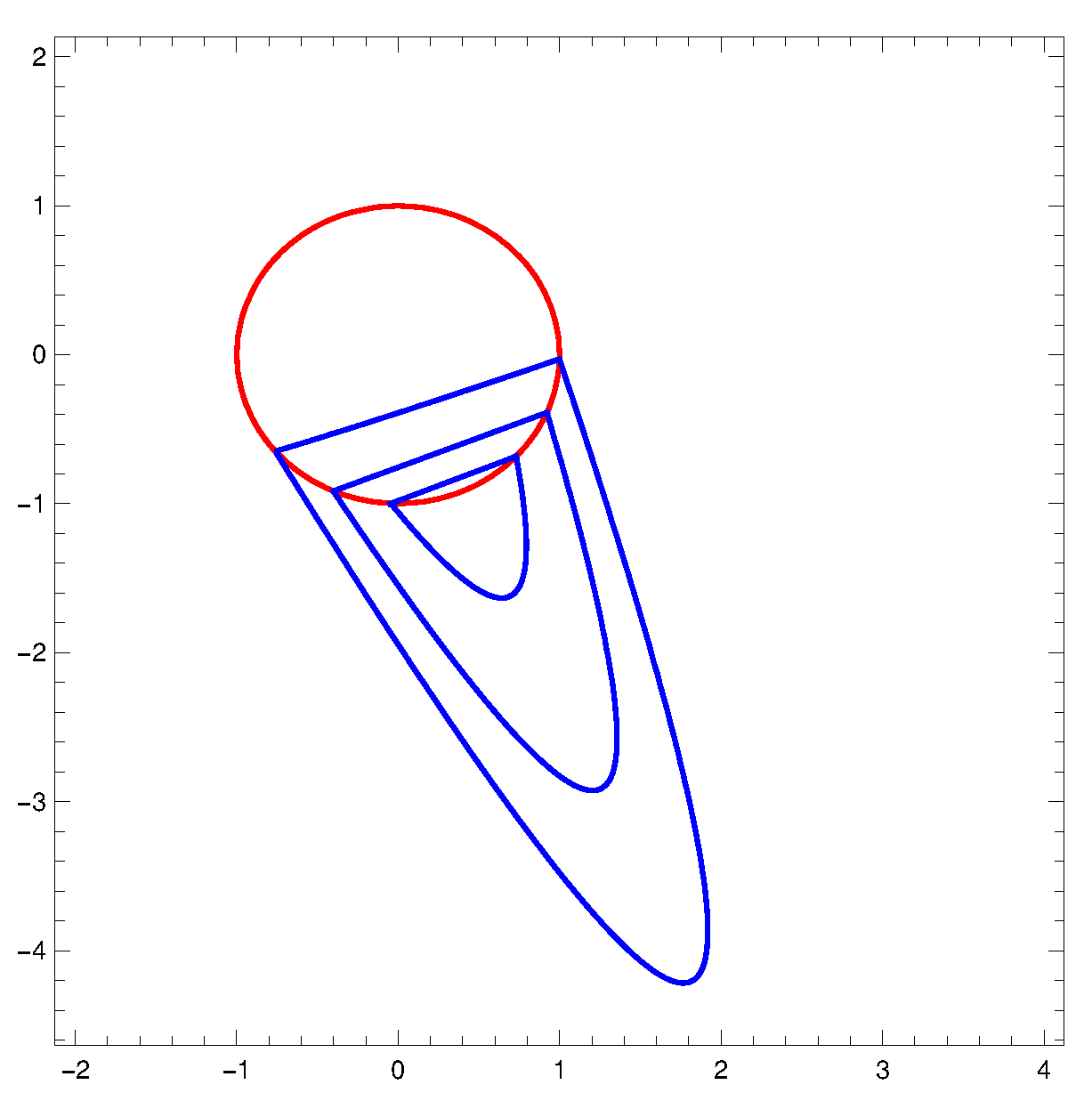
- (c)
- The maximum number of crossing limit cycles of PHS intersecting the ellipseEat two points is at most three, and this maximum is reached; see Figure 3.
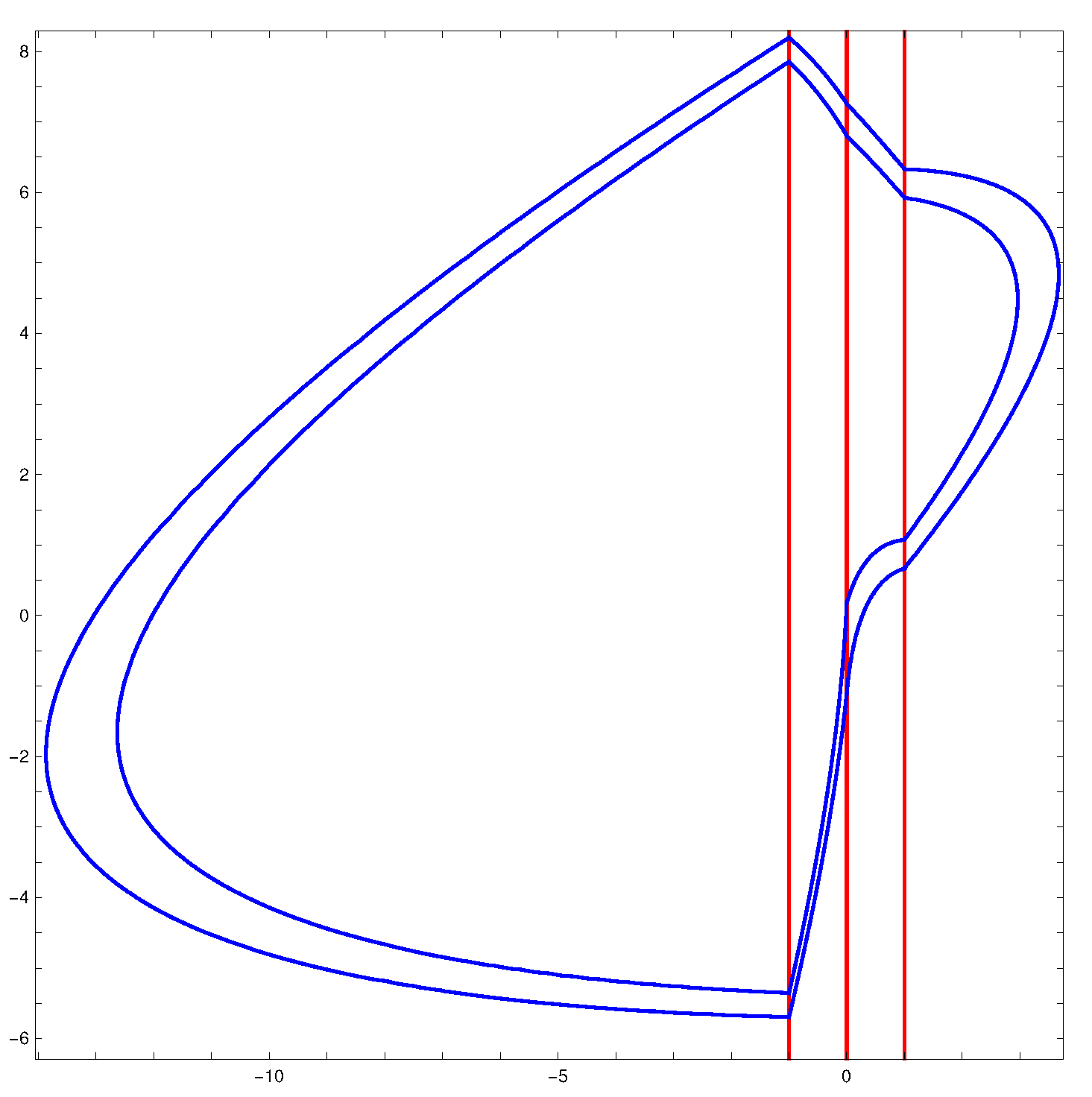
1.2. Crossing Limit Cycles for Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points with Four Zones
2. Proof of Theorem 1
3. Proof of Theorems 2 and 3
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Andronov, A.; Vitt, A.; Khaikin, S. Theory of Oscillations; Pergamon Press: Oxford, UK, 1966. [Google Scholar]
- Banerjee, S.; Verghese, G. Nonlinear Phenomena in Power Electronics; Attractors, bifurcations chaos and nonlinear control; Wiley-IEEE Press: New York, NY, USA, 2001. [Google Scholar]
- Leine, R.I.; Nijmeijer, H. Dynamics and Bifurcations of Non-Smooth Mechanical Systems; Lecture Notes in Applied and Computational Mechanics, 18; Springer: Berlin, Germany, 2004. [Google Scholar]
- Liberzon, D. Switching in Systems and Control: Foundations and Applications; Birkhäuser: Boston, MA, USA, 2003. [Google Scholar]
- Di Bernardo, M.; Budd, C.J.; Champneys, A.R.; Kowalczyk, P. Piecewise-Smooth Dynamical Systems: Theory and Applications; Appl. Math. Sci. Series 163; Springer: London, UK, 2008. [Google Scholar]
- Simpson, D.J.W. Bifurcations in Piecewise–Smooth Continuous Systems; World Scientific Series on Nonlinear Science A; World Scientific: Singapore, 2010; Volume 69. [Google Scholar]
- Lum, R.; Chua, L.O. Global propierties of continuous piecewise-linear vector fields. Part I: Simplest case in . Int. J. Circuit Theory Appl. 1991, 19, 251–307. [Google Scholar]
- Freire, E.; Ponce, E.; Rodrigo, F.; Torres, F. Bifurcation sets of continuous piecewise linear systems with two zones. Int. J. Bifurc. Chaos 1998, 8, 2073–2097. [Google Scholar] [CrossRef]
- Han, M.; Zhang, W. On Hopf bifurcation in non-smooth planar systems. J. Differ. Equ. 2010, 248, 2399–2416. [Google Scholar] [CrossRef] [Green Version]
- Huan, S.M.; Yang, X.S. On the number of limit cycles in general planar piecewise linear systems. Disc. Cont. Dyn. Syst. 2012, 32, 2147–2164. [Google Scholar] [CrossRef]
- Llibre, J.; Ponce, E. Three nested limit cycles in discontinuous piecewise linear differential systems with two zones. Dyn. Cont. Disc. Impul. Syst. Ser. B 2012, 19, 325–335. [Google Scholar]
- Llibre, J.; Novaes, D.D.; Teixeira, M.A. Maximum number of limit cycles for certain piecewise linear dynamical systems. Nonlinear Dyn. 2015, 82, 1159–1175. [Google Scholar] [CrossRef] [Green Version]
- Benterki, R.; Llibre, J. The limit cycles of discontinuous piecewise linear differential systems formed by centers and separated by irreducible cubic curves I. 2019. submitted. [Google Scholar]
- Chen, H.; Li, D.; Xie, J.; Yue, Y. Limit cycles in planar continuous piecewise linear systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 438–454. [Google Scholar] [CrossRef]
- Jimenez, J.J.; Llibre, J.; Medrado, J.C. Crossing limit cycles for a class of piecewise linear differential centers separated by a conic. Elect. J. Differ. Equ. 2020, accepted. [Google Scholar]
- Llibre, J.; Zhang, X. Limit cycles for discontinuous planar piecewise linear differential systems separated by an algebraic curve. Int. J. Bifurc. Chaos 2019, 29, 1950017. [Google Scholar] [CrossRef] [Green Version]
- Filippov, A.F. Differential Equations With Discontinuous Righthand Sides; Kluwer Academic Publishers Group: Dordrecht, The Netherlands, 1998. [Google Scholar]
- Fonseca, A.F.; Llibre, J.; Mello, L.F. Limit cycles in planar piecewise linear Hamiltonian systems with three zones without equilibrium points. Int. J. Bifurc. Chaos 2019, accepted. [Google Scholar]
- Shang, Y. Lie algebraic discussion for affinity based information diffusion in social networks. Open Phys. 2017, 15, 705–711. [Google Scholar] [CrossRef]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benterki, R.; LLibre, J. Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points. Mathematics 2020, 8, 755. https://doi.org/10.3390/math8050755
Benterki R, LLibre J. Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points. Mathematics. 2020; 8(5):755. https://doi.org/10.3390/math8050755
Chicago/Turabian StyleBenterki, Rebiha, and Jaume LLibre. 2020. "Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points" Mathematics 8, no. 5: 755. https://doi.org/10.3390/math8050755
APA StyleBenterki, R., & LLibre, J. (2020). Crossing Limit Cycles of Planar Piecewise Linear Hamiltonian Systems without Equilibrium Points. Mathematics, 8(5), 755. https://doi.org/10.3390/math8050755