
Mindlin-Reissner Analytical Model with Curvature for Tunnel Ventilation Shafts Analysis


Abstract
:1. Introduction
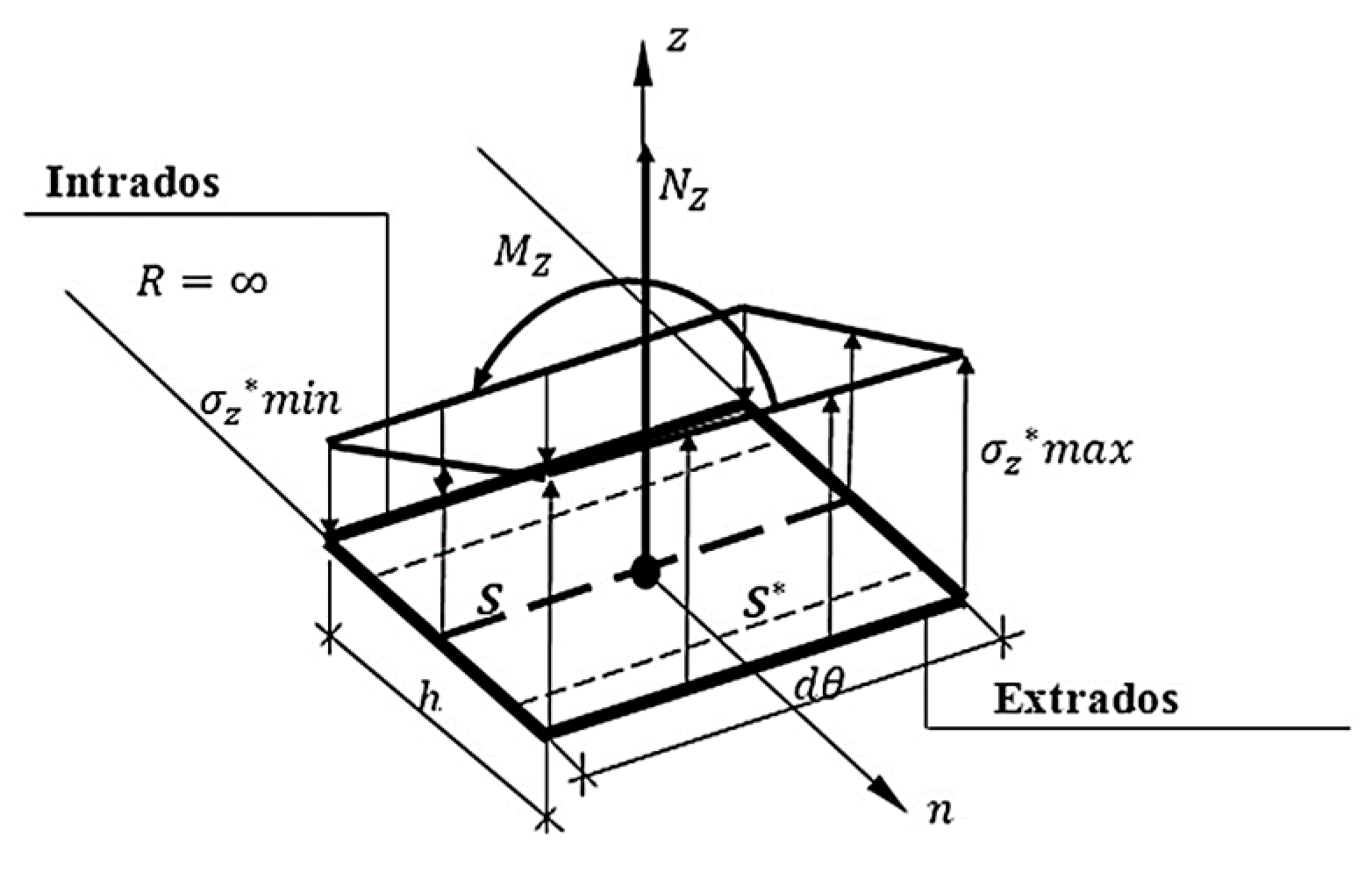
- The model involves a bending of a flat plate plus a membrane behavior without curvature (Figure 2);
- Nonexistence of the constitutive coupling between the membrane forces and the bending moments for any slenderness ratio ;
- Shear correction factor () is employed in the constant shear force, independently of the shell slenderness ratio.
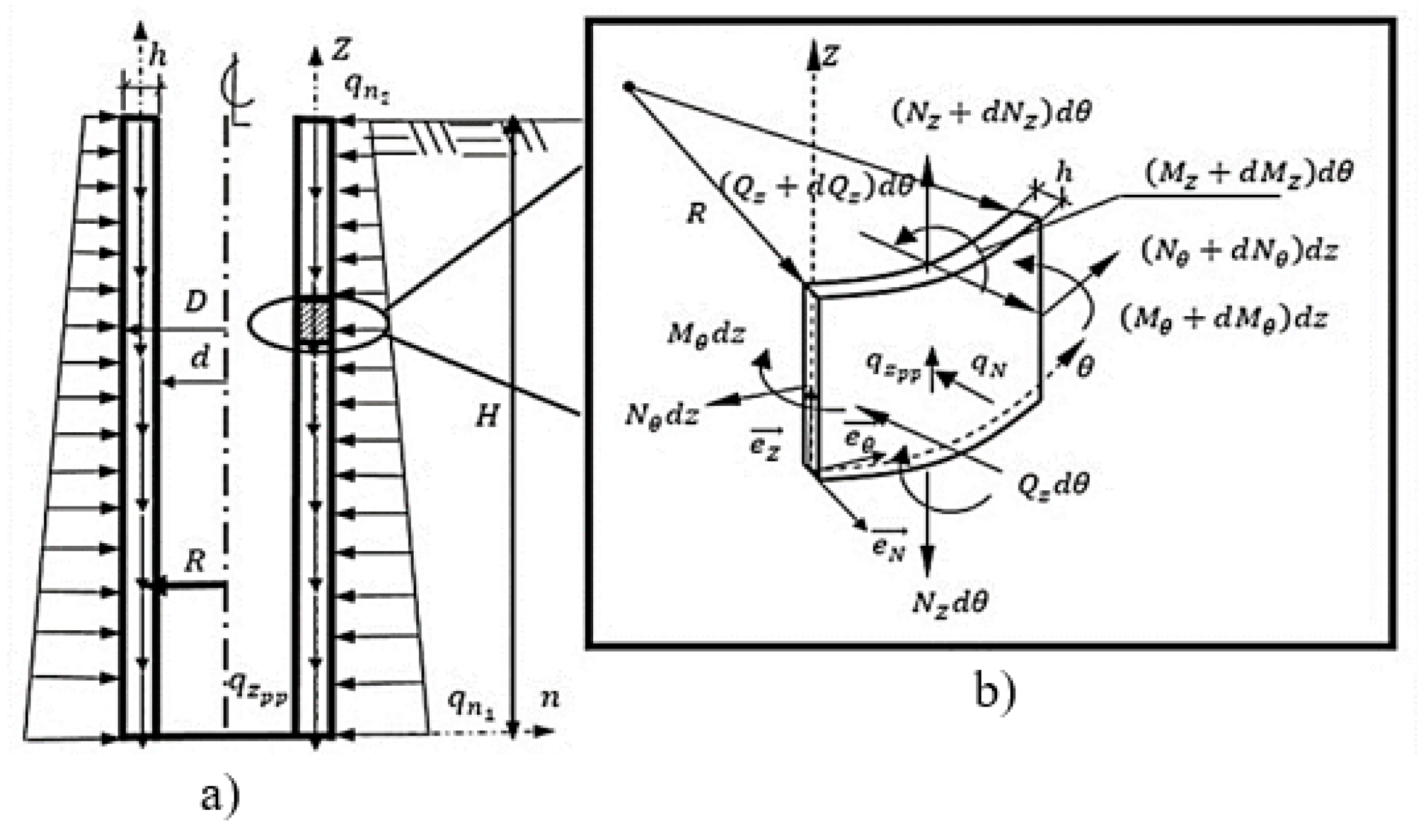
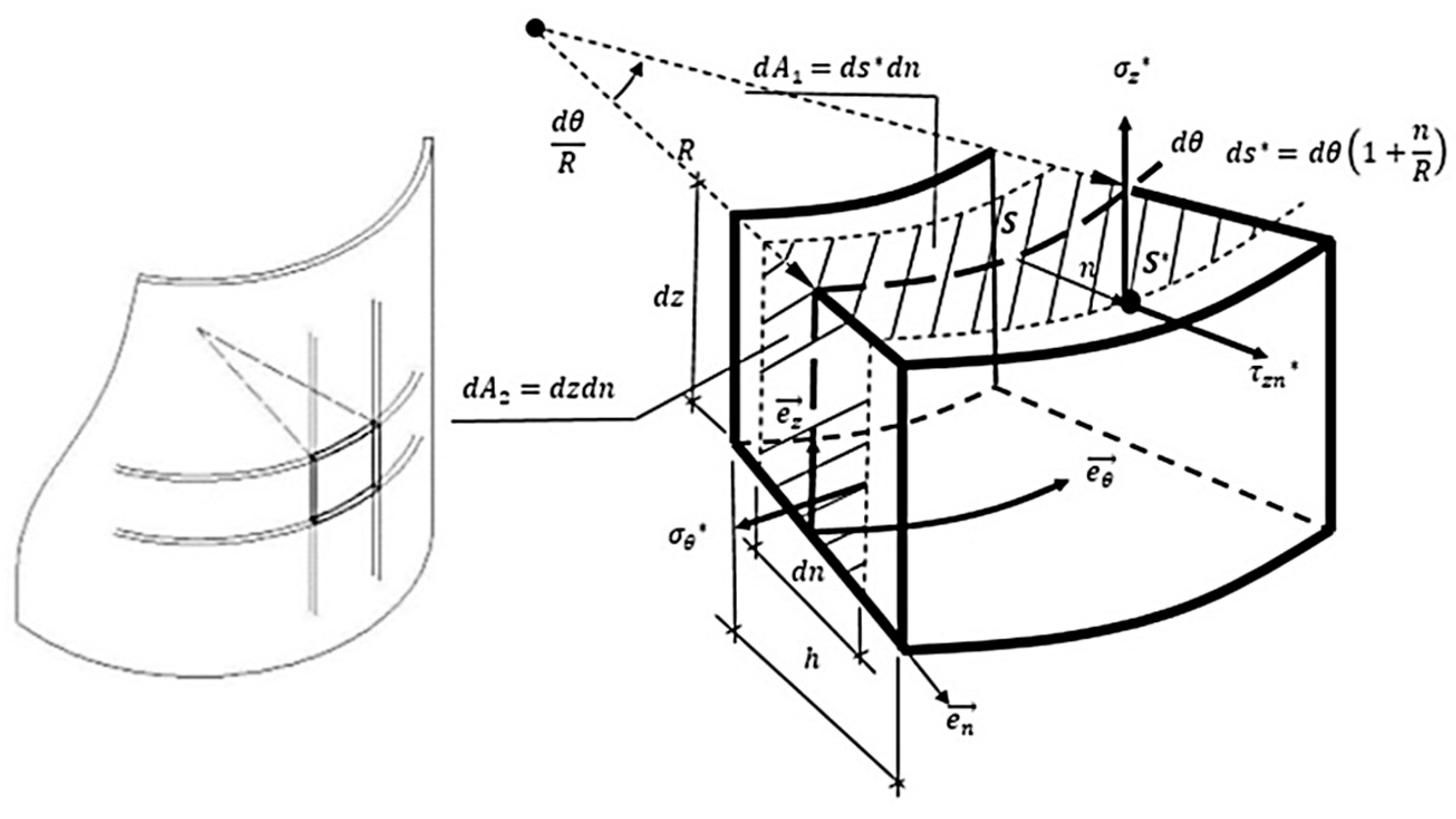
2. Coupled Constitutive Model for General Bending of a Coaxial Cylinder
3. New Mathematical Operational Model
4. Particular Cases
5. Analytical Resolution of the New Mathematical Model
6. Numerical Results and Discussions
7. Conclusions
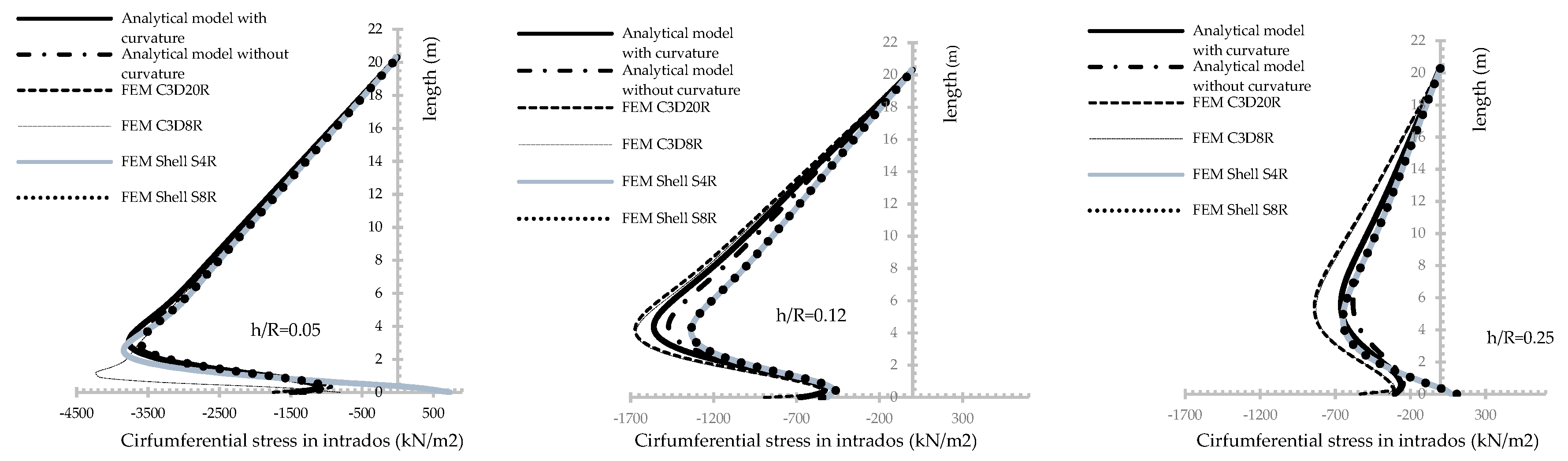
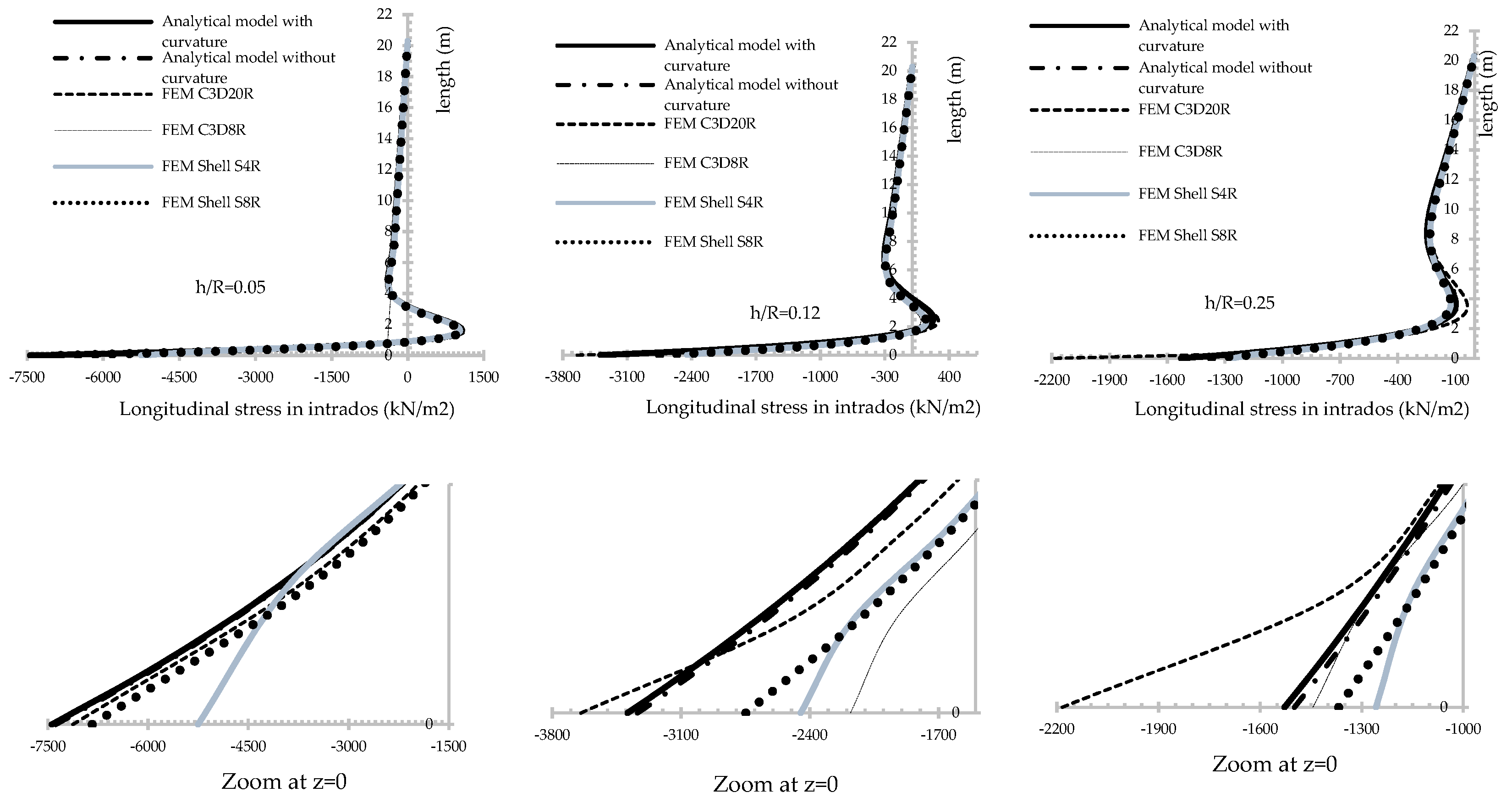
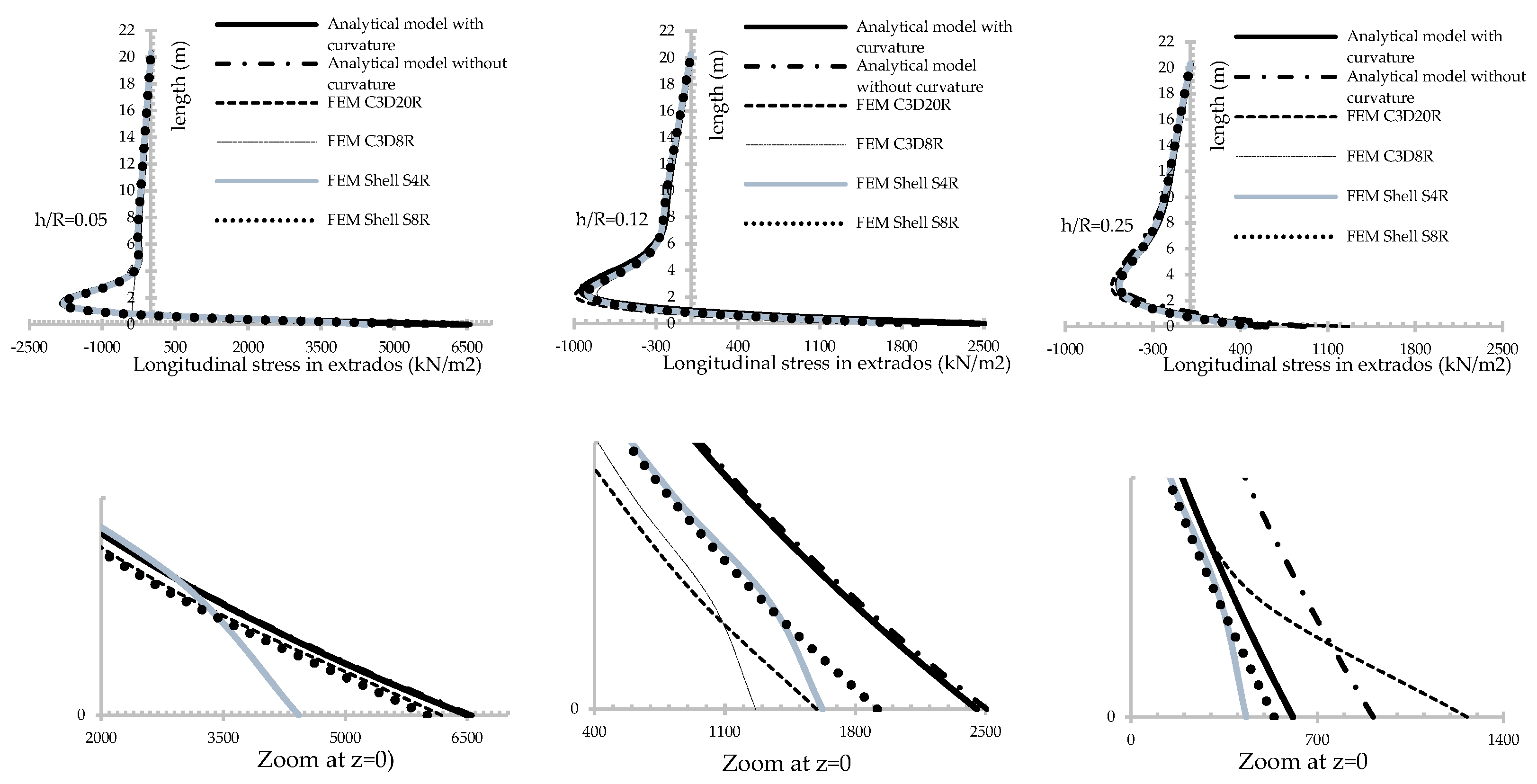
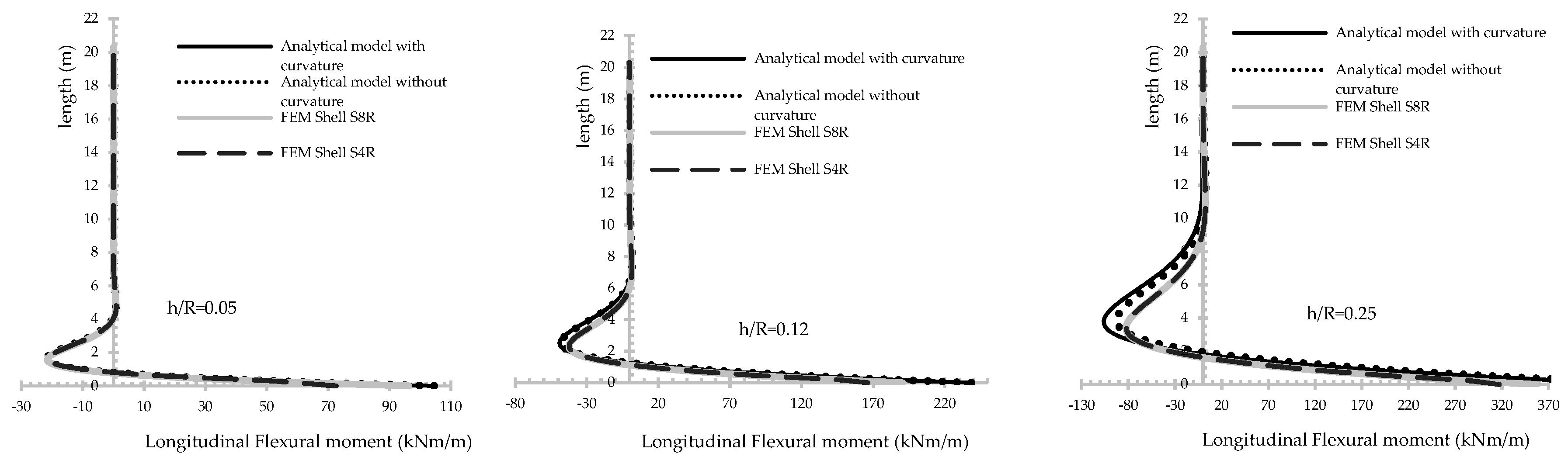
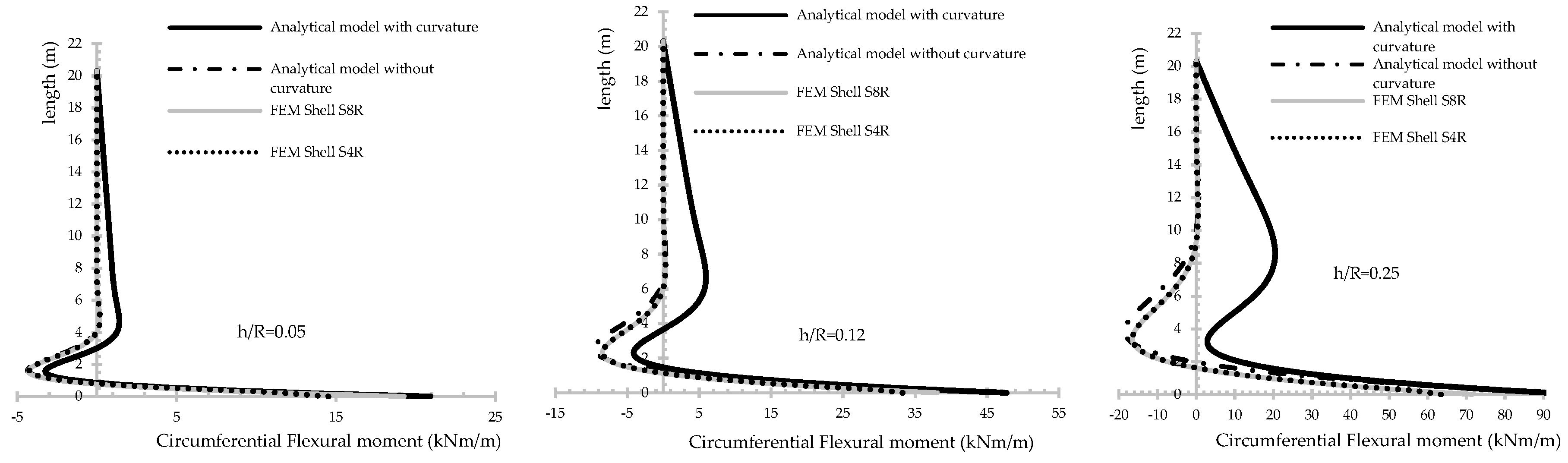
- When the isotropic shell is thin, its predominant resistant mechanism is the circumferential membrane force with an inversion of bending moments in the both main directions. From an increase in the slenderness ratio, the flexural contribution in the two main directions dominated the internal equilibrium of the shell and the inserting of the constitutive curvature acquires the biggest importance in the structural response of the shell. For analysis and tunnel ventilation shafts design with slenderness ratio of it is recommendable to insert the constitutive curvature;
- The equations and the general methodology displayed in this paper might be usefully employed in the analysis and design of the cylindrical shell (isotropic and orthotropic) under general distribution of axial-symmetric pressures. The mathematical model formulated in terms of the internal forces per unit of arc longitude allows to solve differential equation systems of multiple degrees of freedom and to model the complex boundary conditions by the Saint-Venant simplification. For this study case, the equations can be applied by means of the basic spreadsheets as tools to assist in the design.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Lateral earth pressure plus hydrostatic pressure plus overload on the shaft | |
| External and internal diameter of the shaft, respectively | |
| Body load | |
| Thickness of the wall-shaft (shell thickness) | |
| Principal radius of curvature | |
| Bending moments | |
| Shear force | |
| Membrane-axial forces | |
| Deformations | |
| Displacement | |
| Shaft material weight | |
| Water weight | |
| Soil weight | |
| Coefficient of lateral earth pressure at rest | |
| Shaft height | |
| Cylindrical flexion stiffness of a plate | |
| Membrane stiffness | |
| Elasticity modulus | |
| Poisson ratio | |
| Characteristic longitude of the shell | |
| Discriminant | |
| Shear correction factor | |
| exp | |
| Function with constitutive curvature | |
| Homogeneous function without constitutive curvature | |
| Orthogonal curvilinear coordinates | |
| Solution of the homogeneous equation | |
| Solution of the particular equation. Indeterminate coefficient method | |
| Acronyms used | |
| Fundamental system solution | |
| Hyperstatic Degree | |
| Degree of freedom | |
| Indeterminate coefficient method | |
| Finite element method | |
| Natural terrain level | |
| Phreatic Level | |
| (BC) | Boundary condition |
| Porous water pressure | |
| Note: The term “Constitutive curvature” refers to the inclusion of the shell curvature in the constitutive equations relating the resultant internal forces per unit of arc longitude and the middle shell deformations, Equations (7) and (9). | |
References
- Timoshenko, S.P.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill Book Company: New York, NY, USA, 1959. [Google Scholar]
- Goldenveizer, A.L.; Kaplunov, J.D.; Nolde, E.V. On timoshenko-reissner type theories of plates and shells. Int. J. Solids Struct. 1993, 30, 675–694. [Google Scholar] [CrossRef]
- Goldenveizer, A.L. Theory of Elastic Thin Shells; Pergamon Press for A.S.M.E.: Pergamon, Turkey, 1976. (In Russian) [Google Scholar]
- Rotter, J.M.; Sadowski, A.J. Cylindrical shell bendind theory for orthotropic shells under general axisymmetric pressure distributions. Eng. Struct. 2012, 42, 258–265. [Google Scholar] [CrossRef] [Green Version]
- Nerubalio, A.B.; Nerubalio, F. Generalization of Vlasov’s equations for a cylindrical shell to the case of a transversely isotropic material. J. Appl. Mech. Techincal Phys. 2005, 46, 564–569. [Google Scholar] [CrossRef]
- Goldenveizer, A.L. On algorithms of asymptotic derivation of two-dimensional shell theory and Saint-Venant principle. J. Appl. Math. Mech. 1994, 58, 96–108. [Google Scholar]
- Oñate, E. Structural Analysis with the Finite Element Method. Linear Statics: Volume 1: Basis and Solids; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- DIANA. User’s Manual—Element Library; TNO DIANA BV: Delft, The Netherlands, 2017. [Google Scholar]
- MIDAS. Engineering Software, 2016. MIDAS FEA: Analysis and algorithm. Midas Engineering Software. Available online: https://www.midasoft.com/ebook/structural-analysis-guide (accessed on 2 April 2021).
- Castañeda, A.E.; Cobelo, W.; González, Y.; Álvarez, J. A look at half a century of shells foundations, methods of calculation and associate research in Cuba. J. Constr. Cathol. Univ. Chile 2011, 26, 245–268. (In Spanish) [Google Scholar]
- Hernández(Pimpo), J.E. Unified Approach to the Membrane Theory of Shells; Centro de Informacion Cientifica y Tecnica, Universidad de la Habana: La Habana, Cuba, 1972; pp. 21–34. [Google Scholar]
- Timoshenko, S.P.; Goodier, N. Elasticity Theory; McGraw-Hill Book Company: New York, NY, USA, 1970. [Google Scholar]
- Ignaczak, J.; Hetnarski, R. Mathematic Theory of Elasticity; McGraw-Hill Book Company: New York, NY, USA, 1956. [Google Scholar]
- Álvarez, J. Inverse Formulation of Shell in Relative Coordinate with Projected Deformations. Ph.D. Thesis, Technological University of Havana, La Habana, Cuba, 2014. (In Spanish). [Google Scholar]
- Novozhilov, V.V. The Theory of Thin Shells; Sudpromgiz: Leningrad, Russia, 1962. (In Russian) [Google Scholar]
- Hamdan, M.N.; Abuzed, O.; Al-Salaymeh, A. Assessment of an edge type settlement of above ground liquid storage tanks using a simple beam model. Appl. Math. Model. 2007, 31, 2461–2474. [Google Scholar] [CrossRef]
- Caneiro, J.A.H.; Hernández, J.P. Analysis of superficial cylindrical circumferencially prestressed tanks. Rev. Obras Públicas 1999, 29–38. (In Spanish) [Google Scholar]
- Kukreti, A.R.; Zaman, M.M.; Issa, A. Analysis of fluid storage tanks including foundation-superstructure interaction. Appl. Math. Model. 1993, 17, 618–631. [Google Scholar] [CrossRef]
- Quanwei, R.; Hongjiong, T. Numerical solution of the static beam problem by Bernoulli collocation method. Appl. Math. Model. 2016, 40, 193–205. [Google Scholar]
- Vilardell, J.M. Structural Analysis and Cylindrical Deposit Criteria for Pre-Stressed Concretes; Channels and Ports: Barcelona, Spain, 1994. (In Spanish) [Google Scholar]
- Aulduchateau, P.; Zachmann, D. Theory and Problems of Partial Differential Equations; McGraw-Hill Book Company: New York, NY, USA, 2010. [Google Scholar]
- Bronson, R.; Costa, G. Differential Equations; McGraw-Hill Companies: New York, NY, USA, 2009. [Google Scholar] [CrossRef]
- Eurocode, E.N. 1991-6. Eurocode 3: Design of Steel Structures, Part1–6: Strengh and Stability of Shell Structures; Eurocode, Ed.; Comité Européen de Normalisation: Brussels, Belgium, 2007. [Google Scholar]
- R2014b, MV. Mathlab (Matrix Laboratory and Guide); Mathlab V R2014b App Building; MathWorks: Natick, MA, USA, 2014.
- Espejel, O.A.; Castro, C.J.; Mena, E. Structural design of Shaft and Tunnel. In Studies; Calculation Memory of Executive Project; The Instituto de Ingeniería UNAM: Chalco, Mexico, 2003. (In Spanish) [Google Scholar]
- Abaqus. Analysis user´s manual. In Documentation; Dassault Systemes Simulia Corporation: Mason, OH, USA, 2016. [Google Scholar]
- Eduardo, N.D. A continuum mechanics based four-node shell element for general non-linear analysis. Eng. Comput. 1984, 1, 77–88. [Google Scholar]
- Flores, F.G.; Oñate, E. A solid finite element with an improvement in the transverse shear behavior for shell analysis. Métodos Numéricos Para Cálculo Diseño Ing. 2011, 27, 258–268. (In Spanish) [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Relative Error (%) | |||
|---|---|---|---|
| ID | Simple Term | ||
|---|---|---|---|
| BC1 r | Clamped | and | |
| BC1 f | and | ||
| BC2 r | Pinned | and | |
| BC2 f | and | ||
| BC3 | Free edge | and |
| Physical and Mechanical Properties |
| Geometrical Properties |
| Finite Element Type Description | |||||||
|---|---|---|---|---|---|---|---|
| Nodes | Elements | Nodes | Elements | Nodes | Elements | ||
| Solid elements 3D | C3D20R: A 20-node quadratic brick, reduced integration | 59,644 | 8432 | 289,708 | 57,528 | 326,636 | 71,928 |
| C3D8R: An 8-node linear brick, reduced integration, hourglass control | 17,112 | 8432 | 77,456 | 57,528 | 84,952 | 71,928 | |
| Shell elements | S8R: An 8-node doubly curved thick shell, reduced integration | 8694 | 8568 | 8694 | 8568 | 8694 | 8568 |
| S4R: A 4-node doubly curved thin or thick shell, reduced integration, hourglass control, finite membrane strains | 25,956 | 8568 | 25,956 | 8568 | 25,956 | 8568 | |
| Length (m) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Analytical Solution | FEM Shells | FEM 3D | ||||||||||
| With CC | Without CC | % EA | S4R | % ES4R | S8R | % ES8R | C3D8R | % EC3D8R | C3D20R | % EA-C3D20R | ||
| 0.05 | 2.57 | 3833.002 | 3923.135 | 2.35 | 3596.92 | 6.16 | 3773.11 | 1.59 | 3730.3 | 0.514 | 3749.56 | 2.225 |
| 0.12 | 3.73 | 1523.094 | 1601.1821 | 5.13 | 1447.13 | 4.99 | 1447.63 | 5.21 | 1640.83 | 0.787 | 1628.02 | 6.445 |
| 0.25 | 5.1 | 644.19 | 706.634 | 9.69 | 586.868 | 8.90 | 587.301 | 9.69 | 752.557 | 0.557 | 748.391 | 13.923 |
| Where: | CC: Constitutive curvature; EA: relative error between the analytical results (pattern: analytical solution with CC); ES4R: relative error between the analytical result with CC and shell element S4R (pattern: analytical solution with CC); ES8R: relative error between the analytical result with CC and shell element S8R (pattern: analytical solution with CC); EC3D8R: relative error between the elements C3D8R and C3D20R (pattern: C3D20R); EA-C3D20R: relative error between the analytical result with CC and the element C3D20R (pattern: C3D20R). | |||||||||||
| Length (m) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Analytical Solution | FEM Shells | FEM 3D | ||||||||||
| With CC | Without CC | % EA | S4R | % ES4R | S8R | % ES8R | C3D8R | % EC3D8R | C3D20R | % EA-C3D20R | ||
| 0.05 | 3.06 | 3770.237 | 3673.337 | 2.57 | 3834.26 | 1.70 | 3599.85 | 4.52 | 3619.5 | 4.517 | 3790.72 | 0.543 |
| 0.12 | 4.38 | 1560.739 | 1471.875 | 5.69 | 1335.59 | 14.43 | 1336.09 | 14.39 | 1665.84 | 0.471 | 1673.72 | 7.239 |
| 0.25 | 5.85 | 712.314 | 634.328 | 10.95 | 649.409 | 8.83 | 649.813 | 8.77 | 828.22 | 1.459 | 840.48 | 17.993 |
| See Table 5 for legend | ||||||||||||
| Analytical Solution | FEM Shells | FEM 3D | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| With CC | Without CC | % EA | S4R | % ES4R | S8R | % ES8R | C3D8R | % EC3D8R | C3D20R | % EA-C3D20R | |
| 0.05 | 6500.02 | 6556.31 | 0.87 | 4429.12 | 31.860 | 6006.91 | 7.586 | 412.305 | 93.334 | 6184.77 | 5.097 |
| 0.12 | 2452.9 | 2506.165 | 2.17 | 1623.46 | 33.815 | 1917.51 | 21.827 | 1265.24 | 53.086 | 2696.94 | 9.049 |
| 0.25 | 861.4145 | 910.11 | 5.65 | 432.582 | 49.782 | 537.565 | 37.595 | 535.274 | 57.637 | 1263.55 | 31.826 |
| See Table 5 for legend | |||||||||||
| Analytical Solution | FEM Shells | FEM 3D | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| With CC | Without CC | % EA | S4R | % ES4R | S8R | % ES8R | C3D8R | % EC3D8R | C3D20R | % EA-C3D20R | |
| 0.05 | 7444.063 | 7386.986 | 0.77 | 5253.69 | 29.424 | 6837.6 | 8.147 | 412.305 | 94.214 | 7126.37 | 4.458 |
| 0.12 | 3390.943 | 3336.8407 | 1.60 | 2450.06 | 27.747 | 2748.18 | 18.955 | 2179.69 | 40.199 | 3644.93 | 6.968 |
| 0.25 | 1790.302 | 1740.786 | 2.77 | 1258.13 | 29.725 | 1368.24 | 23.575 | 1444.26 | 33.889 | 2184.61 | 18.049 |
| See Table 5 for legend | |||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez-Pérez, J.; Peña, F. Mindlin-Reissner Analytical Model with Curvature for Tunnel Ventilation Shafts Analysis. Mathematics 2021, 9, 1096. https://doi.org/10.3390/math9101096
Álvarez-Pérez J, Peña F. Mindlin-Reissner Analytical Model with Curvature for Tunnel Ventilation Shafts Analysis. Mathematics. 2021; 9(10):1096. https://doi.org/10.3390/math9101096
Chicago/Turabian StyleÁlvarez-Pérez, José, and Fernando Peña. 2021. "Mindlin-Reissner Analytical Model with Curvature for Tunnel Ventilation Shafts Analysis" Mathematics 9, no. 10: 1096. https://doi.org/10.3390/math9101096
APA StyleÁlvarez-Pérez, J., & Peña, F. (2021). Mindlin-Reissner Analytical Model with Curvature for Tunnel Ventilation Shafts Analysis. Mathematics, 9(10), 1096. https://doi.org/10.3390/math9101096