
A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle


 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Dynamic Model
- (a)
- The multi-rotor fuselage is considered rigid and symmetrical.
- (b)
- The cable that connects to the load is attached to the center of mass of the air vehicle.
- (c)
- The cable is considered rigid, inelastic, and massless. Its length is constant and is known.
- (d)
- The payload is considered to be a point-mass.
- (e)
- Aerodynamic effects on the load are neglected.
2.1. Euler–Lagrange Methodology
2.2. Linear Model
3. Model-Based Predictive Control
3.1. State Space Model and Input Increments
3.2. Predictions
3.3. Cost Function
3.4. The Constrained MPC Algorithm
3.5. MPC for a Quadrotor with a Suspended Load
4. Numerical Simulations and Results
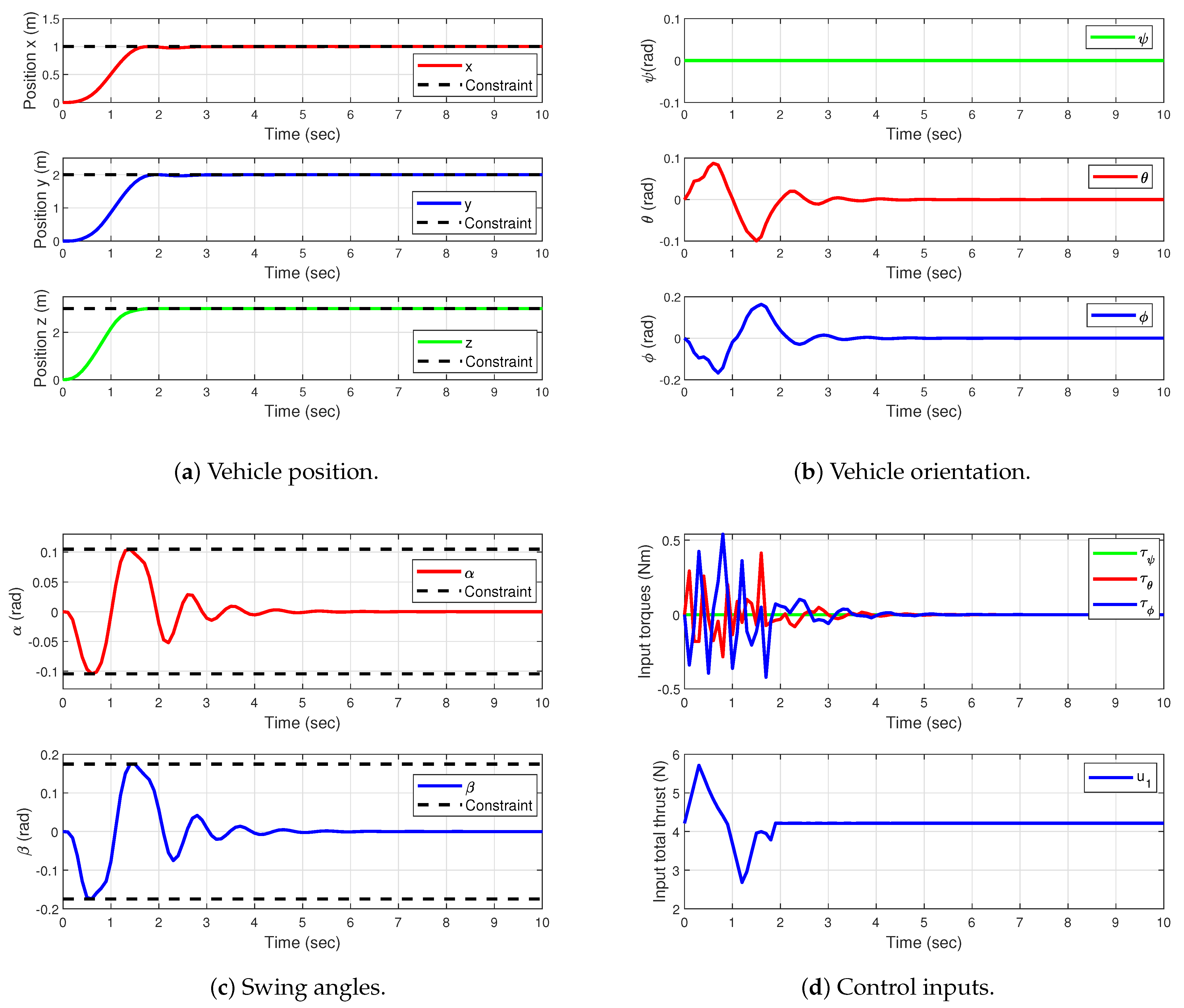
4.1. MPC Performance
4.2. Comparative Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A. Nomenclature

{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| : , , | Inertial frame |
| : , , | Body-fixed frame for quadrotor |
| : x, y, z | Quadrotor linear positions |
| : , , | Quadrotor angular positions (yaw, pitch, roll) |
| : , | Oscillations angles of the payload |
| : , , | Payload position |
| q | Generalized coordinates vector |
| r | Unit vector of vehicle center of mass to payload |
| l | Cable length |
| d | Distance from motors to center of mass |
| Quadrotor and payload masses | |
| g | Gravitational acceleration constant |
| u: , | Control inputs |
| Total propulsive force | |
| Propulsion force provided by the motor i | |
| : , , | Input torques |
| L | Lagrangian |
| Total kinetic and potential energy | |
| , , | Moments of inertia in x, y and z |
| Moment of inertia of the suspended payload | |
| State vector | |
| , | Equilibrium state and input vectors |
| Output vector | |
| , , | Continuous-time model matrices |
| Variable | Description |
|---|---|
| , , | Discrete-time model matrices |
| Augmented state | |
| , , | Augmented model matrices |
| Discrete state, input and output vectors | |
| Increment in control signal | |
| Prediction and control horizons | |
| Augmented state prediction matrices | |
| Output prediction matrices | |
| State prediction matrix | |
| Input prediction matrices | |
| Column vector of prediction of x | |
| State and input penalty matrices | |
| Independent model output | |
| Model residual estimate | |
| Cost function | |
| Optimal value of x. | |
| Setpoint | |
| Block column vector of matrices | |
| Block diagonal matrix of matrices | |
| Maximum and minimum bound of a variable | |
| Sampling time | |
| Constraints matrices |
References
- Bernard, M.; Kondak, K. Generic slung load transportation system using small size helicopters. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3258–3264. [Google Scholar]
- Ghadiok, V.; Goldin, J.; Ren, W. Autonomous indoor aerial gripping using a quadrotor. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4645–4651. [Google Scholar]
- Mellinger, D.; Lindsey, Q.; Shomin, M.; Kumar, V. Design, modeling, estimation and control for aerial grasping and manipulation. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2668–2673. [Google Scholar]
- Baizid, K.; Giglio, G.; Pierri, F.; Trujillo, M.A.; Antonelli, G.; Caccavale, F.; Viguria, A.; Chiaverini, S.; Ollero, A. Experiments on behavioral coordinated control of an unmanned aerial vehicle manipulator system. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4680–4685. [Google Scholar]
- Cruz, P.J.; Oishi, M.; Fierro, R. Lift of a cable-suspended load by a quadrotor: A hybrid system approach. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 1887–1892. [Google Scholar]
- Pounds, P.E.; Bersak, D.R.; Dollar, A.M. Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control. Auton. Robot. 2012, 33, 129–142. [Google Scholar] [CrossRef]
- Palunko, I.; Cruz, P.; Fierro, R. Agile load transportation: Safe and efficient load manipulation with aerial robots. IEEE Robot. Autom. Mag. 2012, 19, 69–79. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Mercado-Ravell, D.A.; Lozano, R.; García-Beltrán, C.D. Swing-attenuation for a quadrotor transporting a cable-suspended payload. ISA Trans. 2017, 68, 433–449. [Google Scholar] [CrossRef] [PubMed]
- Klausen, K.; Fossen, T.I.; Johansen, T.A. Nonlinear control with swing damping of a multirotor UAV with suspended load. J. Intell. Robot. Syst. 2017, 88, 379–394. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.D.; Valencia-Palomo, G.; López-Estrada, F.R. Energy-Based Control and LMI-Based Control for a Quadrotor Transporting a Payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef] [Green Version]
- Guerrero-Sánchez, M.; Lozano, R.; Castillo, P.; Hernández-González, O.; García-Beltrán, C.; Valencia-Palomo, G. Nonlinear control strategies for a UAV carrying a load with swing attenuation. Appl. Math. Model. 2021, 91, 709–722. [Google Scholar] [CrossRef]
- Liang, X.; Lin, H.; Zhang, P.; Wu, S.; Sun, N.; Fang, Y. A Nonlinear Control Approach for Aerial Transportation Systems with Improved Antiswing and Positioning Performance. IEEE Trans. Autom. Sci. Eng. 2020. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, C.; Wu, H.; Sun, B.; Guo, Y. Obstacle Avoidance-based Control System Design of UAV with Suspended Payload. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6839–6844. [Google Scholar]
- Pizetta, I.H.B.; Brandão, A.S.; Sarcinelli-Filho, M. Load Transportation by Quadrotors in Crowded Workspaces. IEEE Access 2020, 8, 223941–223951. [Google Scholar] [CrossRef]
- Pratama, G.N.P.; Masngut, I.; Cahyadi, A.I.; Herdjunanto, S. Robustness of PD control for transporting quadrotor with payload uncertainties. In Proceedings of the 2017 3rd International Conference on Science and Technology-Computer (ICST), Yogyakarta, Indonesia, 11–12 July 2017; pp. 11–15. [Google Scholar]
- Rezaei Lori, A.A.; Danesh, M.; Amiri, P.; Ashkoofaraz, S.Y.; Azargoon, M.A. Transportation of an Unknown Cable-Suspended Payload by a Quadrotor in Windy Environment under Aerodynamics Effects. In Proceedings of the 2021 7th International Conference on Control, Instrumentation and Automation (ICCIA), Tabriz, Iran, 23–24 February 2021; pp. 1–6. [Google Scholar]
- Lv, Z.; Li, S.; Wu, Y.; Wang, Q.G. Adaptive Control for a Quadrotor Transporting a Cable-suspended Payload with Unknown Mass in the Presence of Rotor Downwash. IEEE Trans. Veh. Technol. 2021. [Google Scholar] [CrossRef]
- Alothman, Y.; Gu, D. Quadrotor transporting cable-suspended load using iterative Linear Quadratic regulator (iLQR) optimal control. In Proceedings of the 2016 8th Computer Science and Electronic Engineering (CEEC), Colchester, UK, 28–30 September 2016; pp. 168–173. [Google Scholar]
- Sun, B.; Chaofang, H.; Cao, L.; Wang, N.; Zhou, Y. Trajectory Planning of Quadrotor UAV with Suspended Payload Based on Predictive Control. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 10049–10054. [Google Scholar]
- Erasmus, A.; Jordaan, H. Linear Quadratic Gaussian Control of a Quadrotor with an Unknown Suspended Payload. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020; pp. 1–6. [Google Scholar]
- Wang, Y.; Cai, H.; Zhang, J.; Li, X. Disturbance Attenuation Predictive Optimal Control for Quad-Rotor Transporting Unknown Varying Payload. IEEE Access 2020, 8, 44671–44686. [Google Scholar] [CrossRef]
- Pizetta, I.H.B.; Brandão, A.S.; Sarcinelli-Filho, M. Modelling and control of a PVTOL quadrotor carrying a suspended load. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 444–450. [Google Scholar]
- Valencia-Palomo, G.; Rossiter, J.A. Auto-tuned predictive control based on minimal plant information. IFAC Proc. Vol. 2009, 42, 554–559. [Google Scholar] [CrossRef]
- Rossiter, J. A First Course in Predictive Control; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Garriga, J.L.; Soroush, M. Model predictive control tuning methods: A review. Ind. Eng. Chem. Res. 2010, 49, 3505–3515. [Google Scholar] [CrossRef]
- Gutiérrez-Urquídez, R.; Valencia-Palomo, G.; Rodríguez-Elias, O.M.; Trujillo, L. Systematic selection of tuning parameters for efficient predictive controllers using a multiobjective evolutionary algorithm. Appl. Soft Comput. 2015, 31, 326–338. [Google Scholar] [CrossRef]



| Parameter | Value | Units |
|---|---|---|
| M | m | |
| m | m | |
| d | m | |
| l | m | |
| g | m/s | |
| kgm | ||
| kgm | ||
| kgm | ||
| kgm |
| Parameter | Value | Units |
|---|---|---|
| s | ||
| 10 | – | |
| 3 | – | |
| Q | I | – |
| R | – |
| Controller | Cost | Swing Angle | Ts (s) | MS (Rad) |
|---|---|---|---|---|
| 624.8 | 3.5 | 0.1 | ||
| 3.5 | 0.175 | |||
| 985.1 | 3.5 | 0.28 | ||
| 3.5 | 0.5 | |||
| 1997.3 | 7.2 | 0.05 | ||
| 7.2 | 0.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbina-Brito, N.; Guerrero-Sánchez, M.-E.; Valencia-Palomo, G.; Hernández-González, O.; López-Estrada, F.-R.; Hoyo-Montaño, J.A. A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle. Mathematics 2021, 9, 1822. https://doi.org/10.3390/math9151822
Urbina-Brito N, Guerrero-Sánchez M-E, Valencia-Palomo G, Hernández-González O, López-Estrada F-R, Hoyo-Montaño JA. A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle. Mathematics. 2021; 9(15):1822. https://doi.org/10.3390/math9151822
Chicago/Turabian StyleUrbina-Brito, Norberto, María-Eusebia Guerrero-Sánchez, Guillermo Valencia-Palomo, Omar Hernández-González, Francisco-Ronay López-Estrada, and José Antonio Hoyo-Montaño. 2021. "A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle" Mathematics 9, no. 15: 1822. https://doi.org/10.3390/math9151822
APA StyleUrbina-Brito, N., Guerrero-Sánchez, M. -E., Valencia-Palomo, G., Hernández-González, O., López-Estrada, F. -R., & Hoyo-Montaño, J. A. (2021). A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle. Mathematics, 9(15), 1822. https://doi.org/10.3390/math9151822