
Active Suspension Control Using an MPC-LQR-LPV Controller with Attraction Sets and Quadratic Stability Conditions

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Quarter-Car Active Suspension Model
3. LPV-SS Representation of the Quarter-Car Active Suspension Model
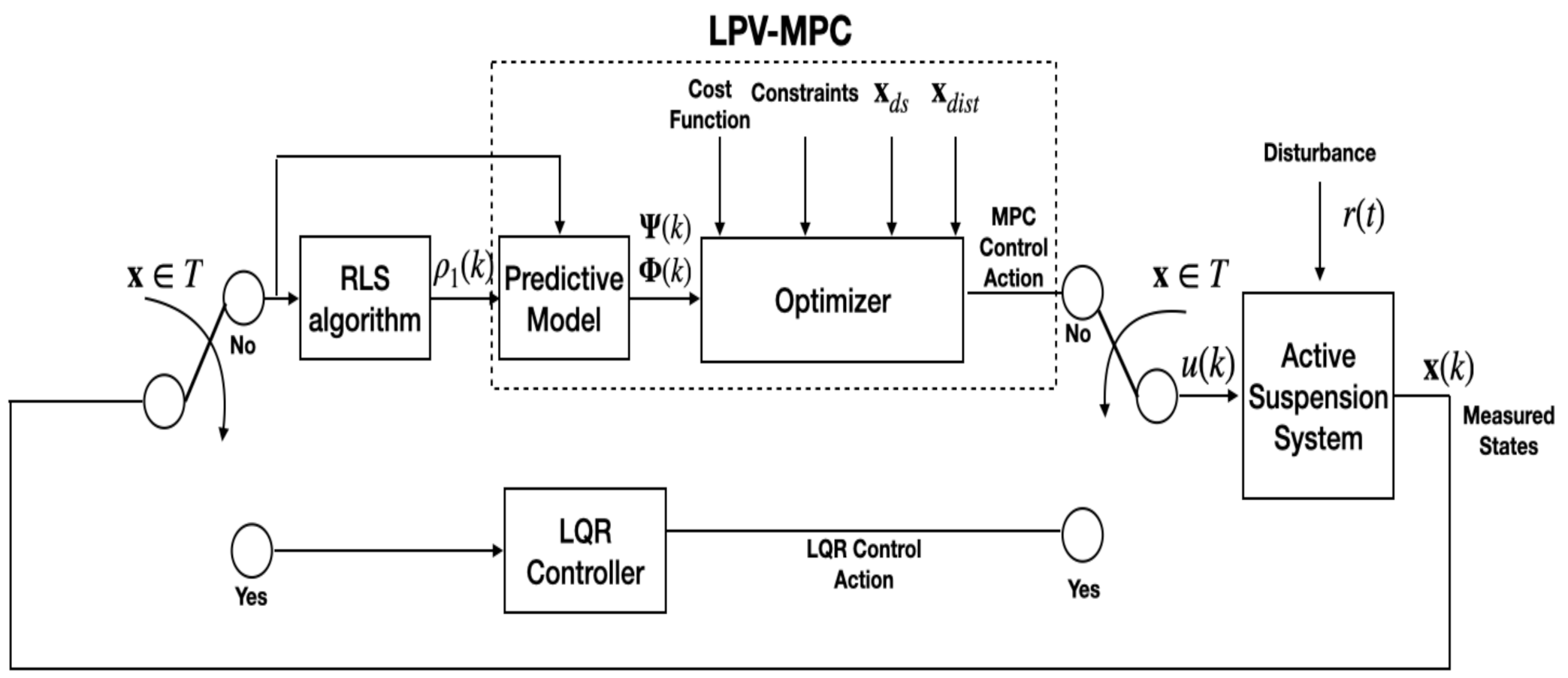
4. LPV-MPC Controller
5. Scheduling Parameter Prediction Using RLS
| Algorithm 1 |
Offline Step 1—Initialize and Online Step 2—Obtain , and Step 3—Construct vector Step 4—Calculate scalar c Step 5—Obtain vector Step 6—Obtain Step 7—Obtain Step 8—Obtain Step 9—Set , If go to Step 10, else, go back to step 3 Step 10—Construct |
6. Quadratic Stability in MPC-LPV Approach
7. MPC-LQR for LPV Models
7.1. Attraction Sets and Terminal Set
7.2. MPC-LQR Dual Controller
8. Results and Discussion
8.1. Frequency-Domain Results
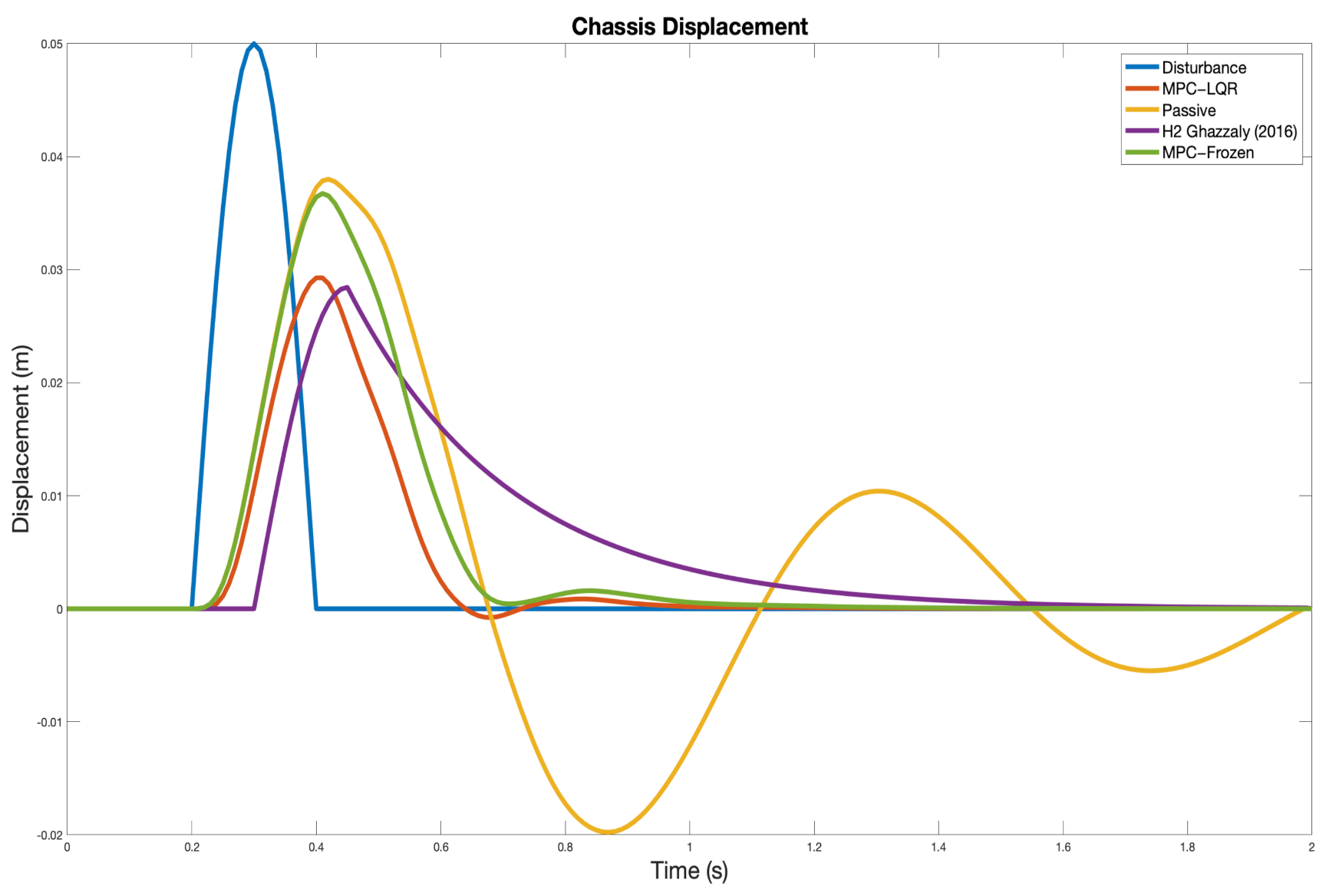
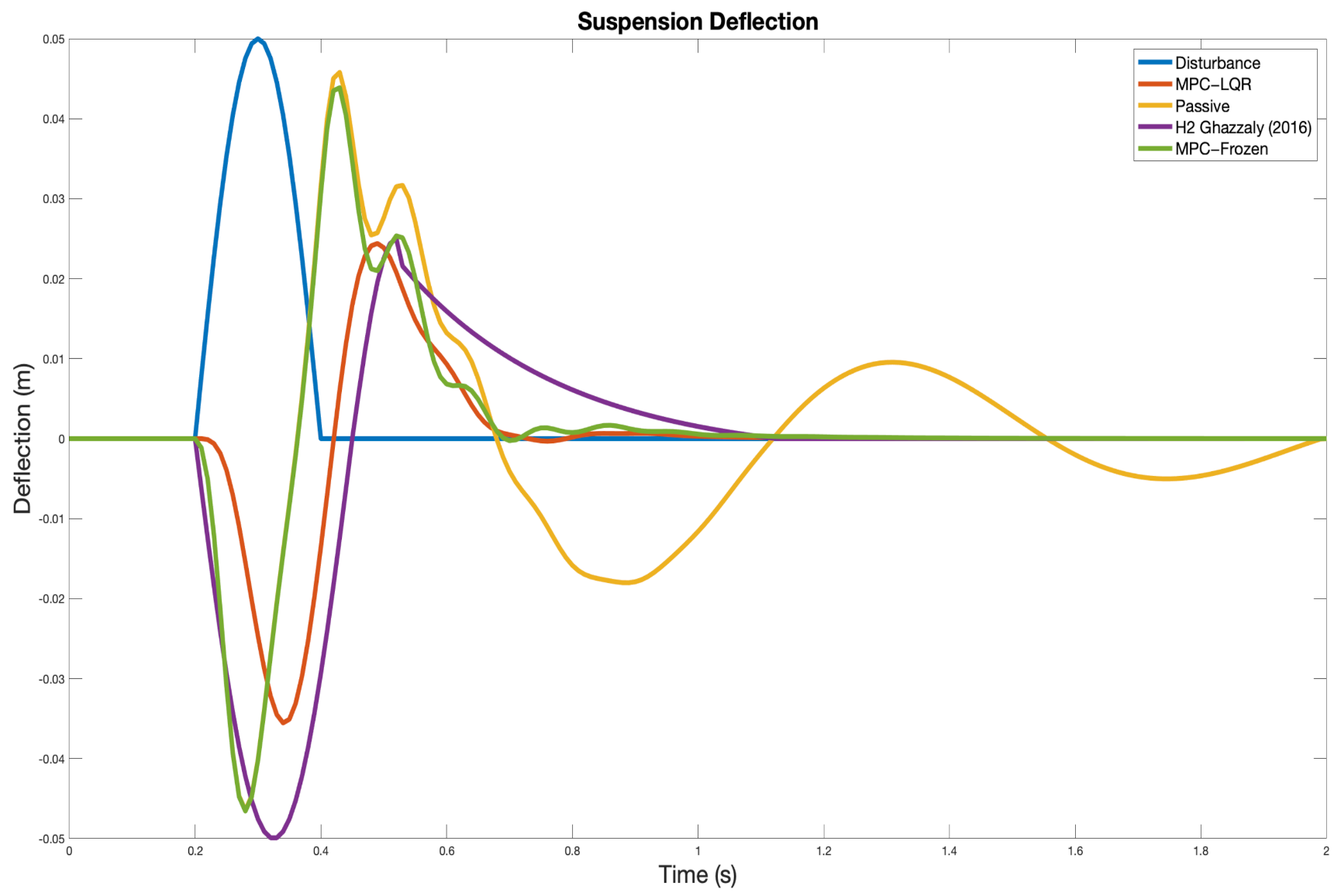
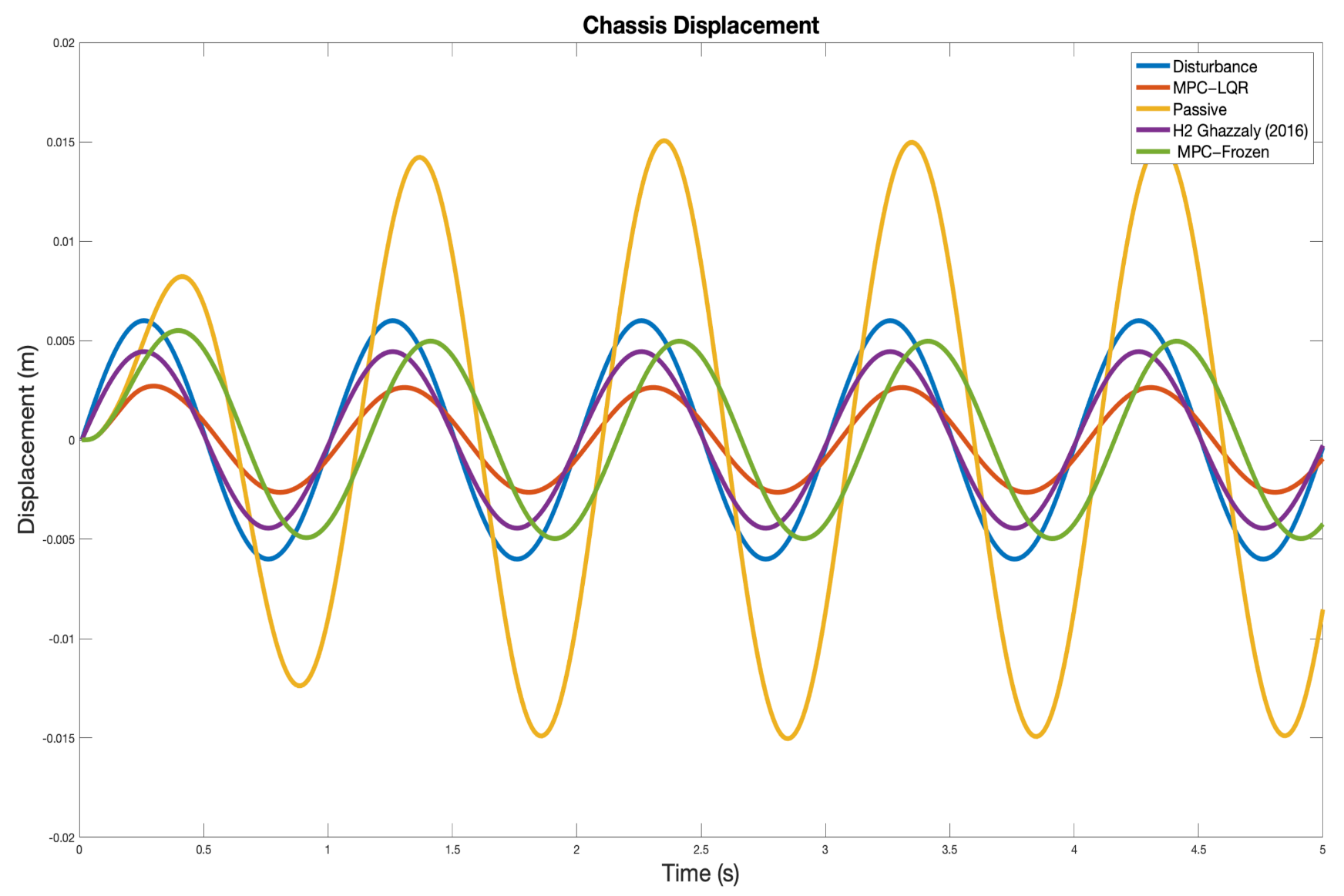
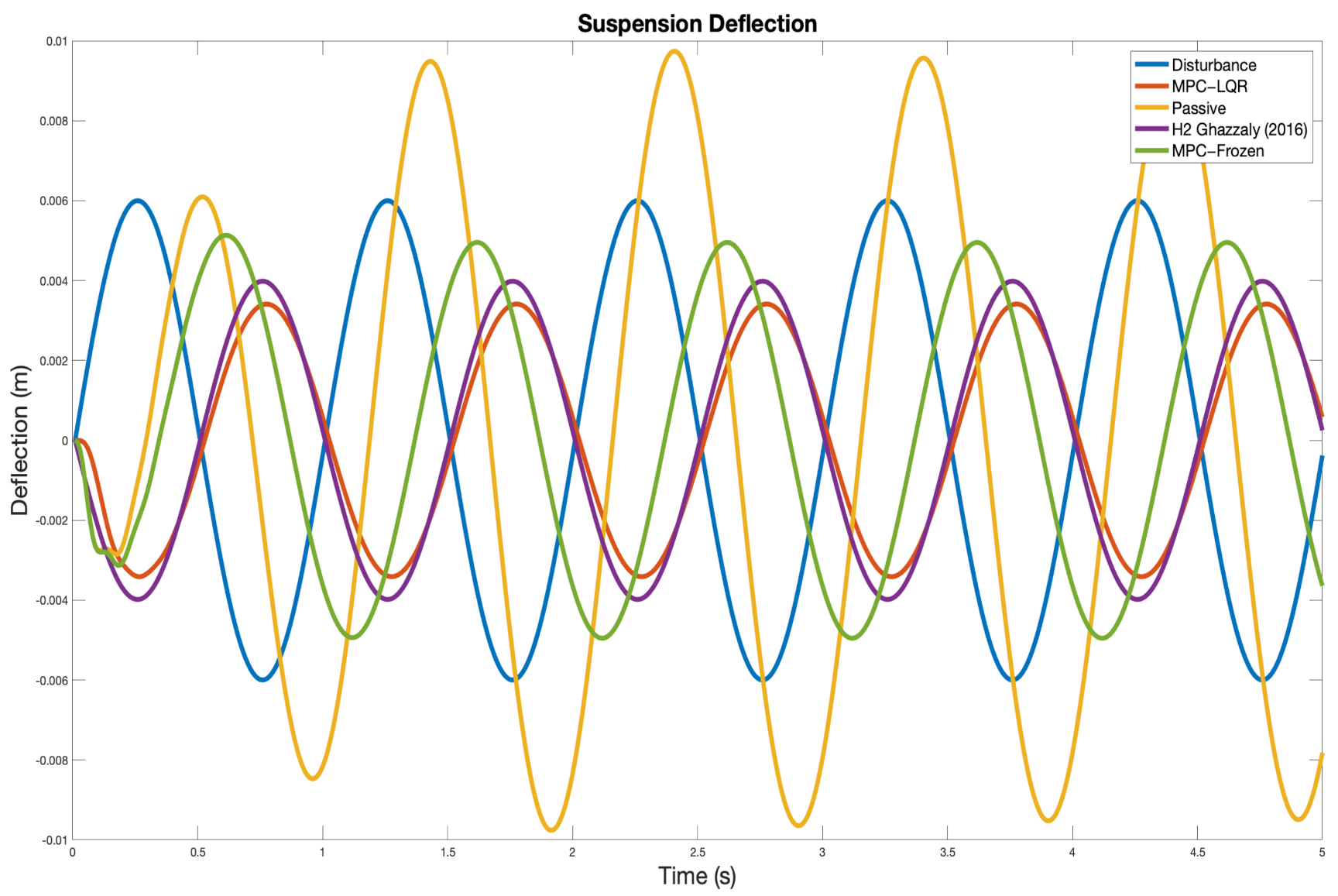
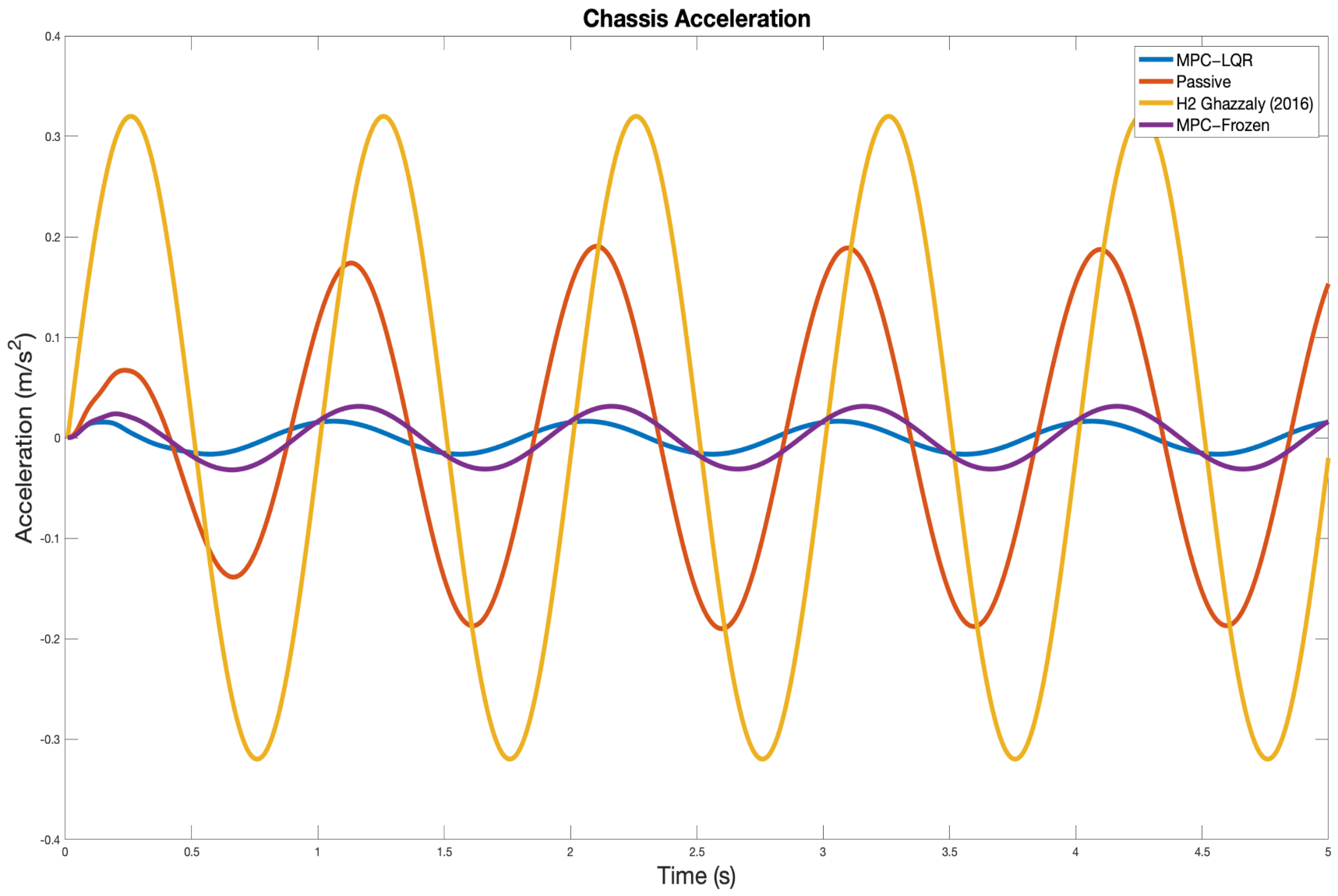
8.2. Time-Domain Results
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mouleeswaran, S. Design and development of PID controller-based active suspension system for automobiles. In PID Controller Design Approaches-Theory, Tuning and Application to Frontier Areas; Vagia, M., Ed.; Intech: Rijeka, Croatia, 2012; pp. 71–98. [Google Scholar]
- Ahmed, A.E.N.S.; Ali, A.S.; Ghazaly, N.M.; Abd el-Jaber, G.T. PID controller of active suspension system for a quarter car model. Int. J. Adv. Eng. Technol. 2015, 8, 899. [Google Scholar]
- Bello, M.M.; Shafie, A.A.; Khan, M.R. Electro-hydraulic pid force control for nonlinear vehicle suspension system. Int. J. Eng. Res. Technol. 2015, 4, 517–524. [Google Scholar]
- Phu, D.X.; An, J.-H.; Choi, S.-B. A Novel Adaptive PID Controller with Application to Vibration Control of a Semi-Active Vehicle Seat Suspension. Appl. Sci. 2017, 7, 1055. [Google Scholar] [CrossRef]
- Yu, S.; Wang, F.; Wang, J.; Chen, H. Full-car active suspension based on H2/generalised H2 output feedback control. Int. J. Veh. Des. 2015, 68, 37–54. [Google Scholar] [CrossRef]
- Afshar, K.K.; Javadi, A.; Jahed-Motlagh, M.R. Robust H∞ control of an active suspension system with actuator time delay by predictor feedback. IET Control. Theory Appl. 2018, 12, 1012–1023. [Google Scholar] [CrossRef]
- Ghazaly, N.M.; Ahmed, A.E.N.S.; Ali, A.S.; Abd, E.-J.G.T. H.∞ Control of active suspension System for a Quarter Car Model. Int. J. Veh. Struct. Syst. (IJVSS) 2016, 8, 35–40. [Google Scholar] [CrossRef]
- Kaleemullah, M.; Faris, W.F.; Hasbullah, F. Control of active suspension system using robust H∞ control with genetic algorithm. Int. J. Adv. Sci. Technol. 2019, 28, 763–782. [Google Scholar]
- Jin, X.; Wang, J.; Sun, S.; Li, S.; Yang, J.; Yan, Z. Design of Constrained Robust Controller for active suspension of In-Wheel-Drive Electric Vehicles. Mathematics 2021, 9, 249. [Google Scholar] [CrossRef]
- Wen, S.; Chen, M.Z.; Zeng, Z.; Yu, X.; Huang, T. Fuzzy control for uncertain vehicle active suspension systems via dynamic sliding-mode approach. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 24–32. [Google Scholar] [CrossRef]
- Mustafa, G.I.; Wang, H.; Tian, Y. Model-free adaptive fuzzy logic control for a half-car active suspension system. Stud. Inform. Control 2019, 28, 13–24. [Google Scholar] [CrossRef]
- Palanisamy, S.; Karuppan, S. Fuzzy control of active suspension system. J. Vibroeng. 2016, 18, 3197–3204. [Google Scholar] [CrossRef] [Green Version]
- Alfadhli, A.; Darling, J.; Hillis, A.J. The Control of an Active Seat Suspension Using an Optimised Fuzzy Logic Controller, Based on Preview Information from a Full Vehicle Model. Vibration 2018, 1, 20–40. [Google Scholar] [CrossRef] [Green Version]
- Rath, J.J.; Defoort, M.; Karimi, H.R.; Veluvolu, K.C. Output feedback active suspension control with higher order terminal sliding mode. IEEE Trans. Ind. Electron. 2016, 64, 1392–1403. [Google Scholar] [CrossRef]
- Chokor, A.; Talj, R.; Charara, A.; Shraim, H.; Francis, C. active suspension control to improve passengers comfort and vehicle’s stability. In Proceedings of the IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 296–301. [Google Scholar]
- Taghavifar, H.; Mardani, A.; Hu, C.; Qin, Y. Adaptive robust nonlinear active suspension control using an observer-based modified sliding mode interval type-2 fuzzy neural network. IEEE Trans. Intell. Veh. 2019, 5, 53–62. [Google Scholar] [CrossRef]
- Aljarbouh, A.; Fayaz, M. Hybrid Modelling and Sliding Mode Control of Semi-active suspension Systems for Both Ride Comfort and Road-Holding. Symmetry 2020, 12, 1286. [Google Scholar] [CrossRef]
- Piñón, A.; Favela-Contreras, A.; Félix-Herrán, L.C.; Beltran-Carbajal, F.; Lozoya, C. An ARX Model-Based Predictive Control of a Semi-Active Vehicle Suspension to Improve Passenger Comfort and Road-Holding. Actuators 2021, 10, 47. [Google Scholar] [CrossRef]
- Yao, J.; Wang, M.; Li, Z.; Jia, Y. Research on model predictive control for automobile active tilt based on active suspension. Energies 2021, 14, 671. [Google Scholar] [CrossRef]
- Theunissen, J.; Sorniotti, A.; Gruber, P.; Fallah, S.; Ricco, M.; Kvasnica, M.; Dhaens, M. Regionless explicit model predictive control of active suspension systems with preview. IEEE Trans. Ind. Electron. 2019, 67, 4877–4888. [Google Scholar] [CrossRef]
- Enders, E.; Burkhard, G.; Munzinger, N. Analysis of the Influence of Suspension Actuator Limitations on Ride Comfort in Passenger Cars Using model predictive control. Actuators 2020, 9, 77. [Google Scholar] [CrossRef]
- Narayan, J.; Gorji, S.A.; Ektesabi, M.M. Power reduction for an active suspension system in a quarter car model using MPC. In Proceedings of the IEEE International Conference on Energy Internet (ICEI), Sydney, Australia, 24–28 August 2020; pp. 140–146. [Google Scholar]
- Bououden, S.; Chadli, M.; Karimi, H.R. A robust predictive control design for nonlinear active suspension systems. Asian J. Control 2016, 18, 122–132. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, D.; Gong, M.; Yang, B. Research on robust model predictive control for electro-hydraulic servo active suspension systems. IEEE Access 2017, 6, 3231–3240. [Google Scholar] [CrossRef]
- Morato, M.M.; Sename, O.; Dugard, L. LPV-MPC fault tolerant control of automotive suspension dampers. IFAC-PapersOnLine 2018, 51, 31–36. [Google Scholar] [CrossRef]
- Morato, M.M.; Normey-Rico, J.E.; Sename, O. Novel qLPV MPC design with least-squares scheduling prediction. IFAC-PapersOnLine 2019, 52, 158–163. [Google Scholar] [CrossRef]
- Morato, M.M.; Normey-Rico, J.E.; Sename, O. Sub-optimal recursively feasible Linear Parameter-Varying predictive algorithm for semi-active suspension control. IET Control Theory Appl. 2020, 14, 2764–2775. [Google Scholar] [CrossRef]
- Boyd, S.; Balakrishnan, V.; Feron, E.; ElGhaoui, L. Control system analysis and synthesis via linear matrix inequalities. In Proceedings of the American Control Conference, San Francisco, CA, USA, 2–4 June 1993; pp. 2147–2154. [Google Scholar]
- Ferramosca, A.; Limón, D.; González, A.H.; Odloak, D.; Camacho, E.F. MPC for tracking target sets. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 8020–8025. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems; Addison-Wesley: Reading, MA, USA, 1988; Volume 3. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1994; Chapter 5; pp. 61–76. [Google Scholar]
- Longge, Z.; Yan, Y. Robust shrinking ellipsoid model predictive control for linear parameter varying system. PLoS ONE 2017, 12, e0178625. [Google Scholar] [CrossRef] [Green Version]
- Ping, X.B.; Wang, P.; Zhang, J.F. A Multi-step Output Feedback Robust MPC Approach for LPV Systems with Bounded Parameter Changes and Disturbance. Int. J. Control Autom. Syst. 2018, 16, 2157–2168. [Google Scholar] [CrossRef]
- Suzukia, H.; Sugie, T. MPC for LPV systems with bounded parameter variation using ellipsoidal set prediction. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; p. 6. [Google Scholar]
- Poussot-Vassal, C.; Savaresi, S.M.; Spelta, C.; Sename, O.; Dugard, L. A methodology for optimal semi-active suspension systems performance evaluation. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2017; pp. 2892–2897. [Google Scholar]
- Fialho, I.; Balas, G.J. Road adaptive active suspension design using linear parameter-varying gain-scheduling. IEEE Trans. Control. Syst. Technol. 2002, 10, 43–54. [Google Scholar] [CrossRef] [Green Version]
- Lofberg, J. Automatic robust convex programming. Optim. Methods Softw. 2012, 27, 115–129. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Units |
|---|---|---|
| 250 | kg | |
| 50 | kg | |
| 50 | kg | |
| 190,000 | N/m | |
| 16,812 | N/m | |
| 1000 | N/(m/s) | |
| 10,300,000 | Pa | |
| 1/30 | s | |
| A | m | |
| 1 | s | |
| N/m | ||
| m/V |
| Variable | MPC-LQR-LPV | H2 (Ghazaly, 2016) | Passive | MPC-Frozen |
|---|---|---|---|---|
| Chassis Displacement (m) | 0.0079 | 0.0091 | 0.0142 | 0.0107 |
| Suspension Deflection (m) | 0.0089 | 0.0149 | 0.0240 | 0.0122 |
| Chassis Acceleration (m/s) | 0.0713 | 0.1104 | 0.1041 | 0.0838 |
| Variable | MPC-LQR-LPV | H2 (Ghazaly, 2016) | Passive | MPC-Frozen |
|---|---|---|---|---|
| Chassis Displacement (m) | 0.0293 | 0.0284 | 0.0380 | 0.0367 |
| Suspension Deflection (m) | 0.0355 | 0.0499 | 0.0464 | 0.0439 |
| Chassis Acceleration (m/s) | 0.2644 | 0.3978 | 0.2925 | 0.2899 |
| Variable | MPC-LQR-LPV | H2 (Ghazaly, 2016) | Passive | MPC-Frozen |
|---|---|---|---|---|
| Chassis Displacement (m) | 0.0027 | 0.0044 | 0.0151 | 0.0055 |
| Suspension Deflection (m) | 0.0034 | 0.0040 | 0.0097 | 0.0051 |
| Chassis Acceleration (m/s) | 0.0164 | 0.32 | 0.162 | 0.0312 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodriguez-Guevara, D.; Favela-Contreras, A.; Beltran-Carbajal, F.; Sotelo, D.; Sotelo, C. Active Suspension Control Using an MPC-LQR-LPV Controller with Attraction Sets and Quadratic Stability Conditions. Mathematics 2021, 9, 2533. https://doi.org/10.3390/math9202533
Rodriguez-Guevara D, Favela-Contreras A, Beltran-Carbajal F, Sotelo D, Sotelo C. Active Suspension Control Using an MPC-LQR-LPV Controller with Attraction Sets and Quadratic Stability Conditions. Mathematics. 2021; 9(20):2533. https://doi.org/10.3390/math9202533
Chicago/Turabian StyleRodriguez-Guevara, Daniel, Antonio Favela-Contreras, Francisco Beltran-Carbajal, David Sotelo, and Carlos Sotelo. 2021. "Active Suspension Control Using an MPC-LQR-LPV Controller with Attraction Sets and Quadratic Stability Conditions" Mathematics 9, no. 20: 2533. https://doi.org/10.3390/math9202533
APA StyleRodriguez-Guevara, D., Favela-Contreras, A., Beltran-Carbajal, F., Sotelo, D., & Sotelo, C. (2021). Active Suspension Control Using an MPC-LQR-LPV Controller with Attraction Sets and Quadratic Stability Conditions. Mathematics, 9(20), 2533. https://doi.org/10.3390/math9202533