
Randomized Projection Learning Method for Dynamic Mode Decomposition



Abstract
:1. Introduction
2. Dynamic Mode Decomposition and Background Theory
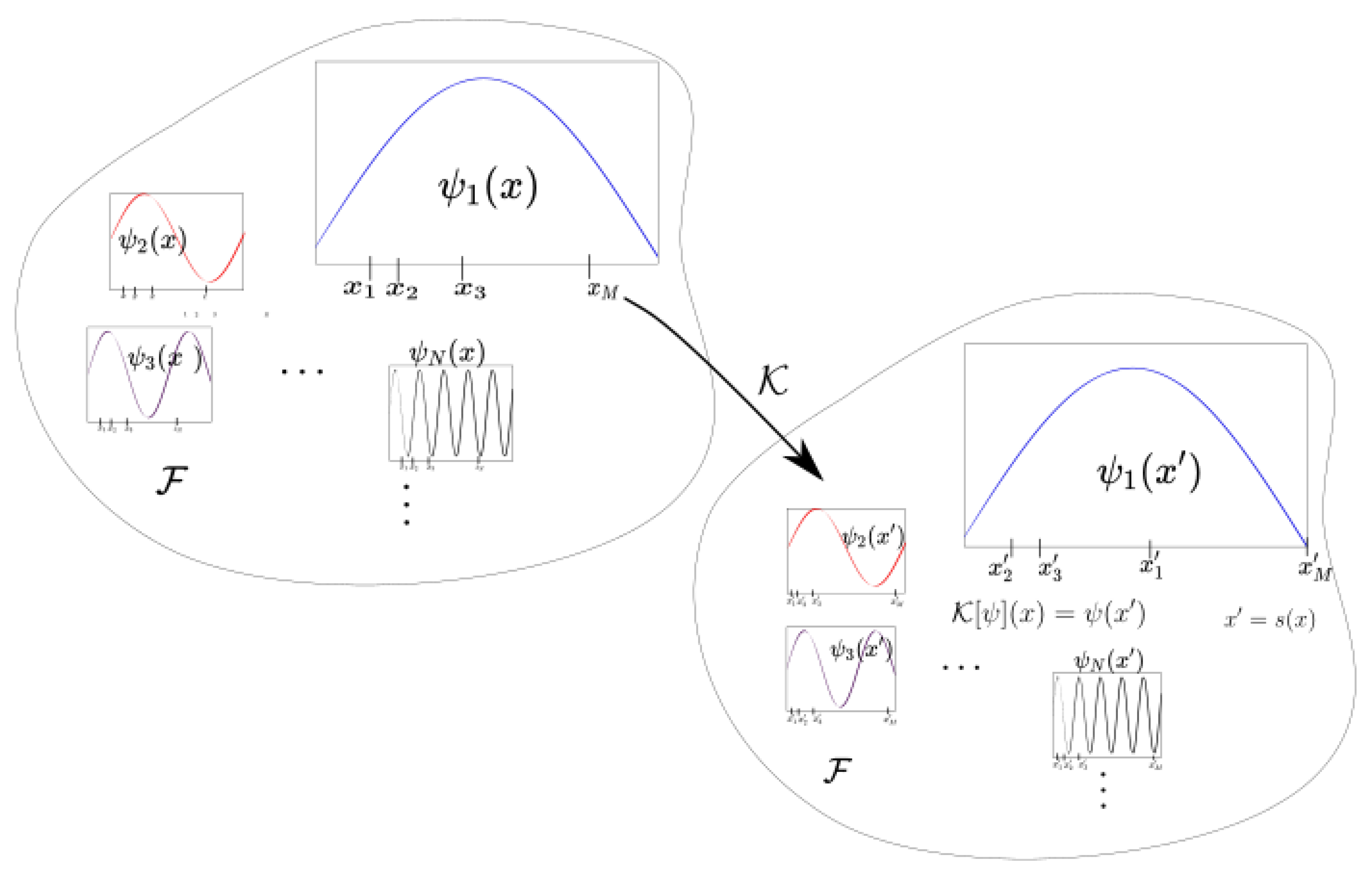
2.1. Koopman Operator
2.2. Dynamic Mode Decomposition
2.3. Random Projection
3. Randomized Dynamic Mode Decomposition
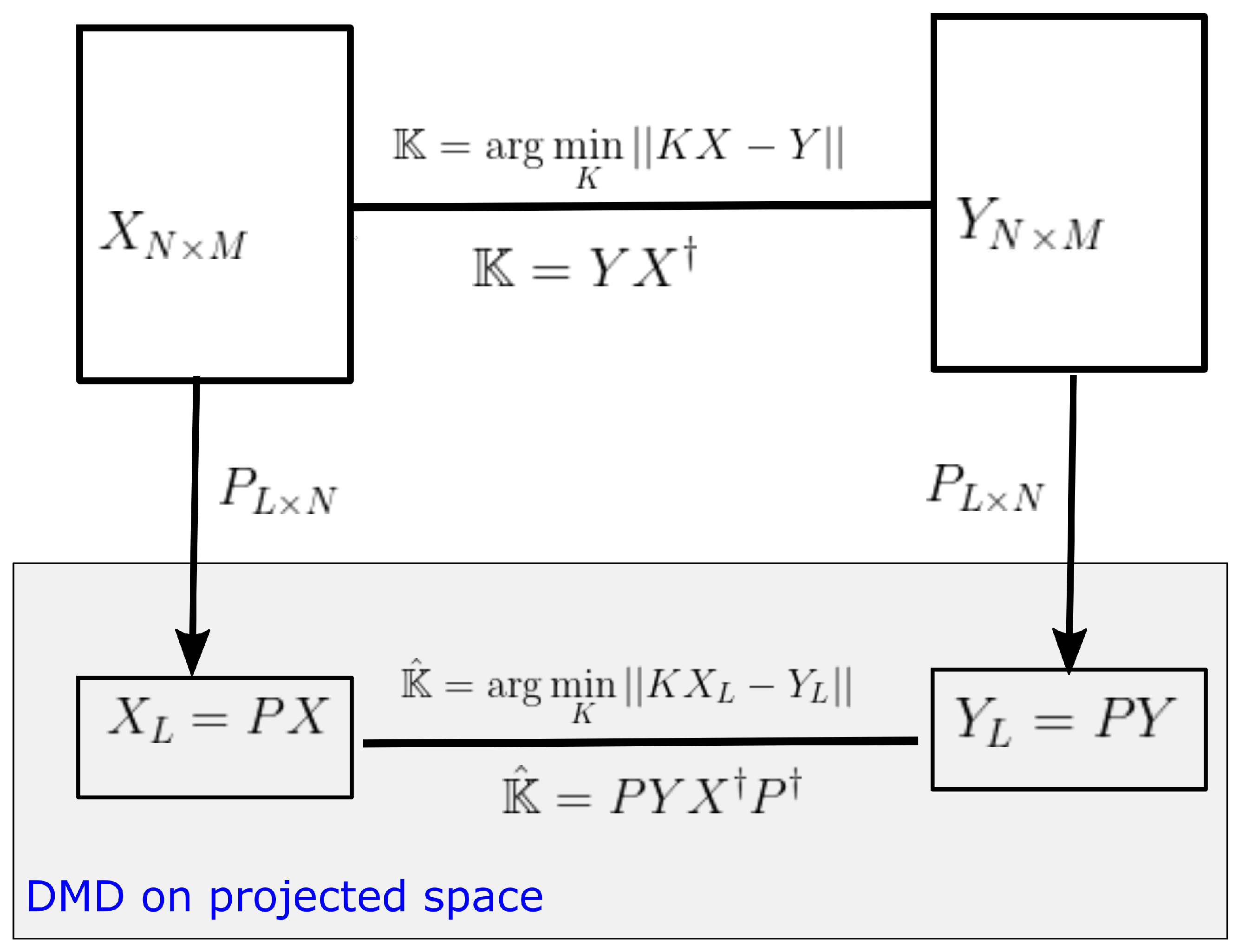
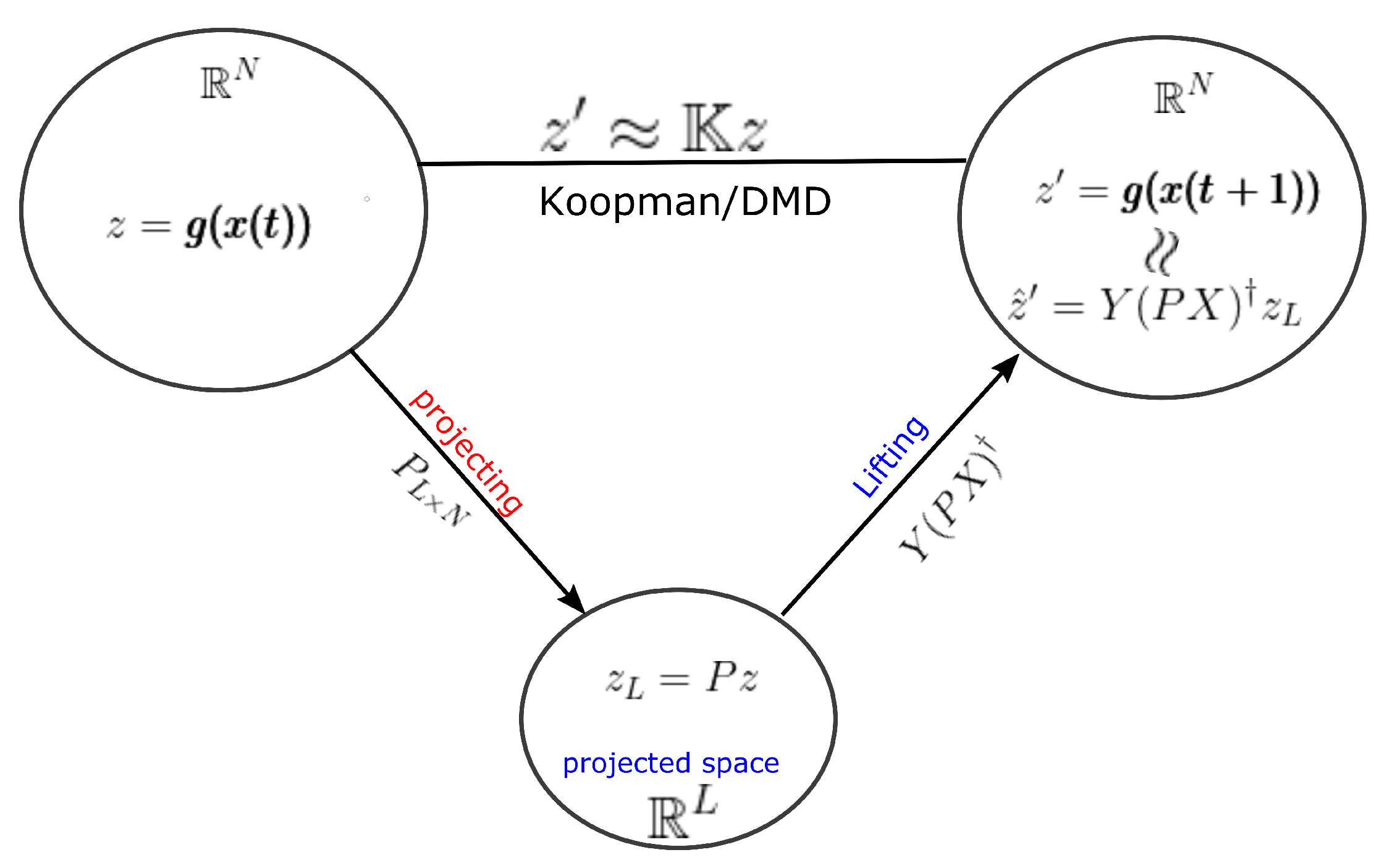
3.1. DMD on Projected Space
3.2. Randomized Methods
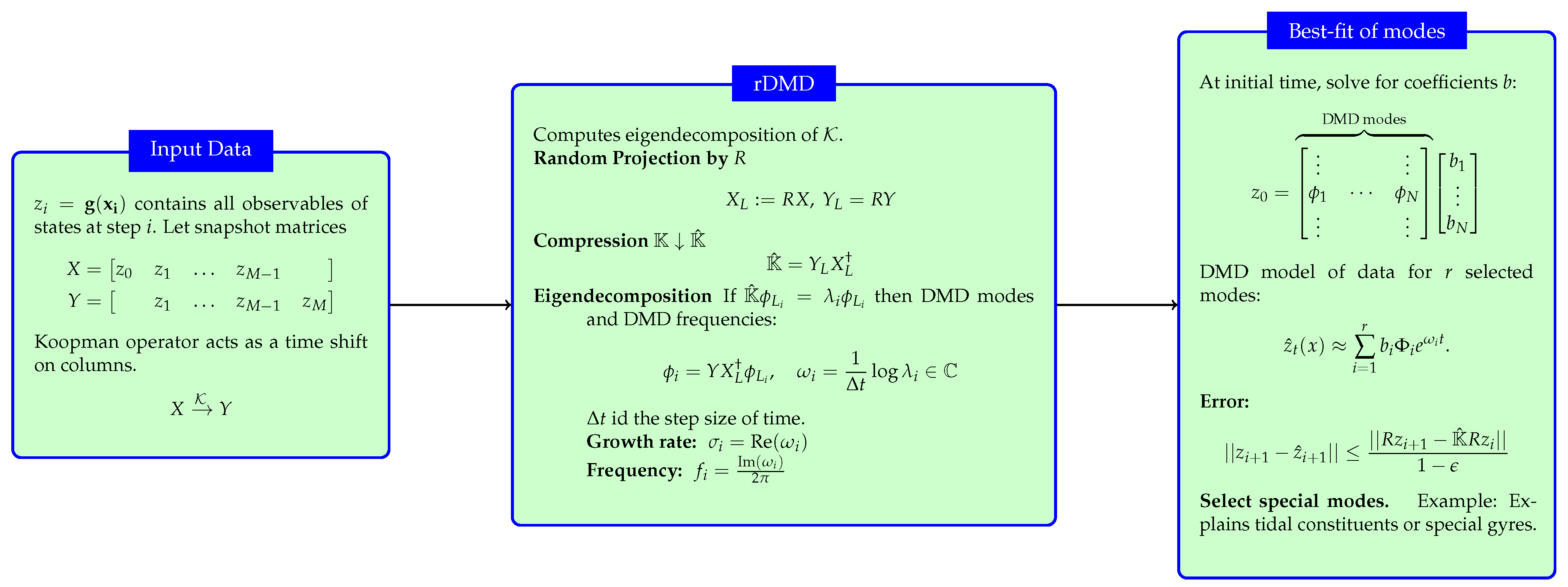
| Algorithm 1 Randomized DMD (rDMD). Figure 4 shows the details of the input and output variable |
Data: Input: ; Choose L such that ; Construct a random matrix such that ; Calculate ; Calculate ; []=eigs(); Result: , |
4. Results and Discussion
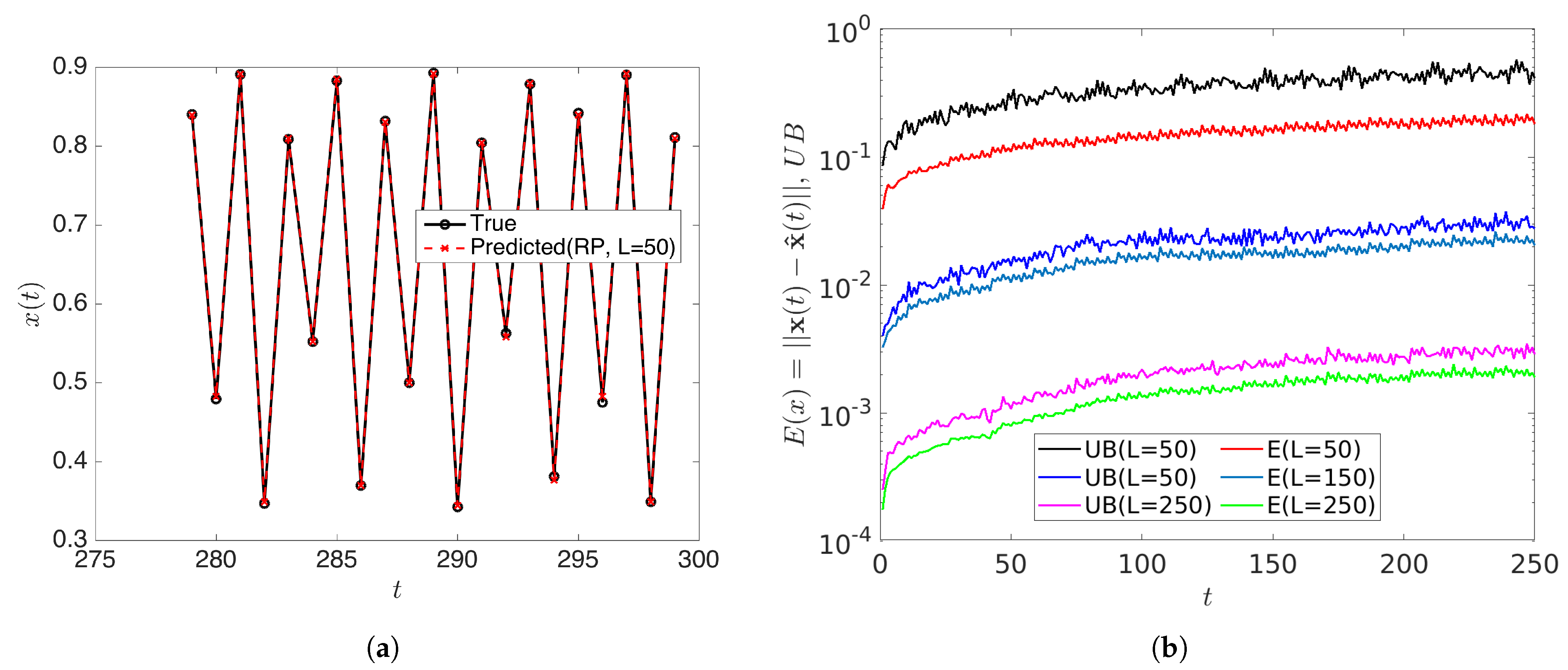
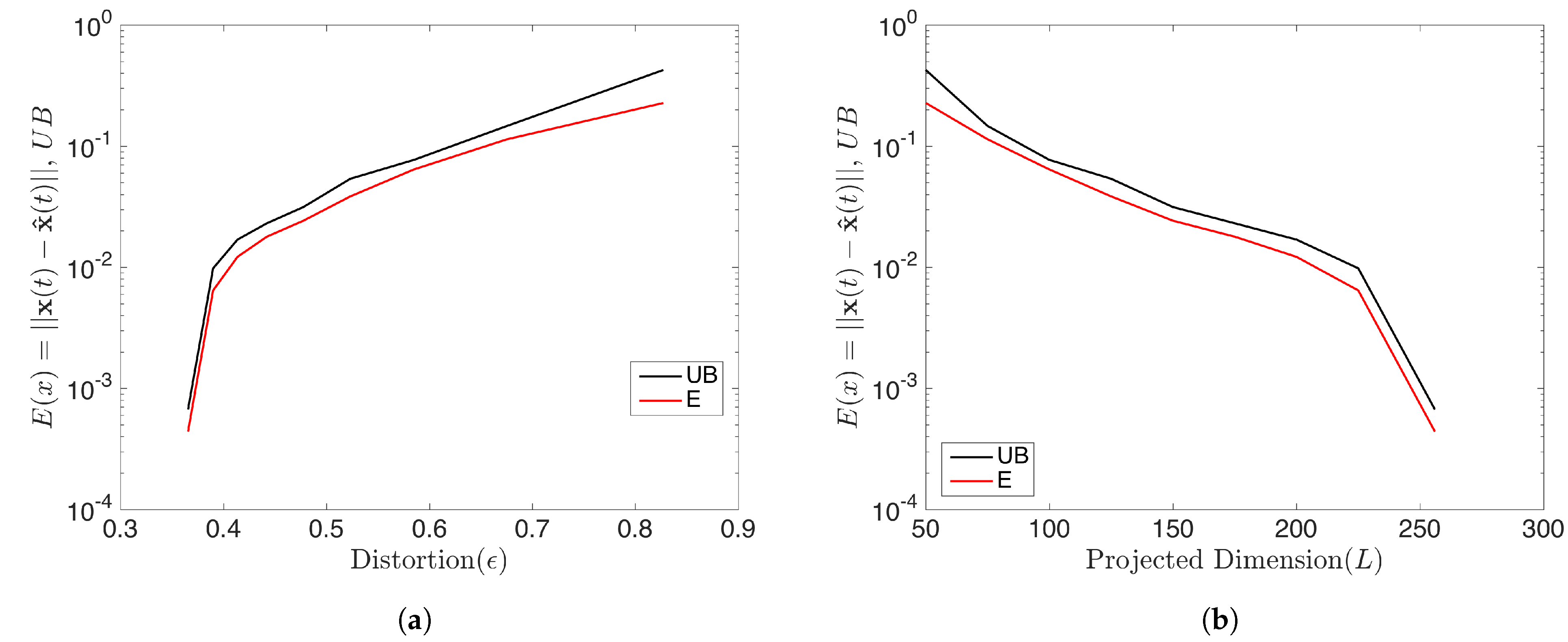
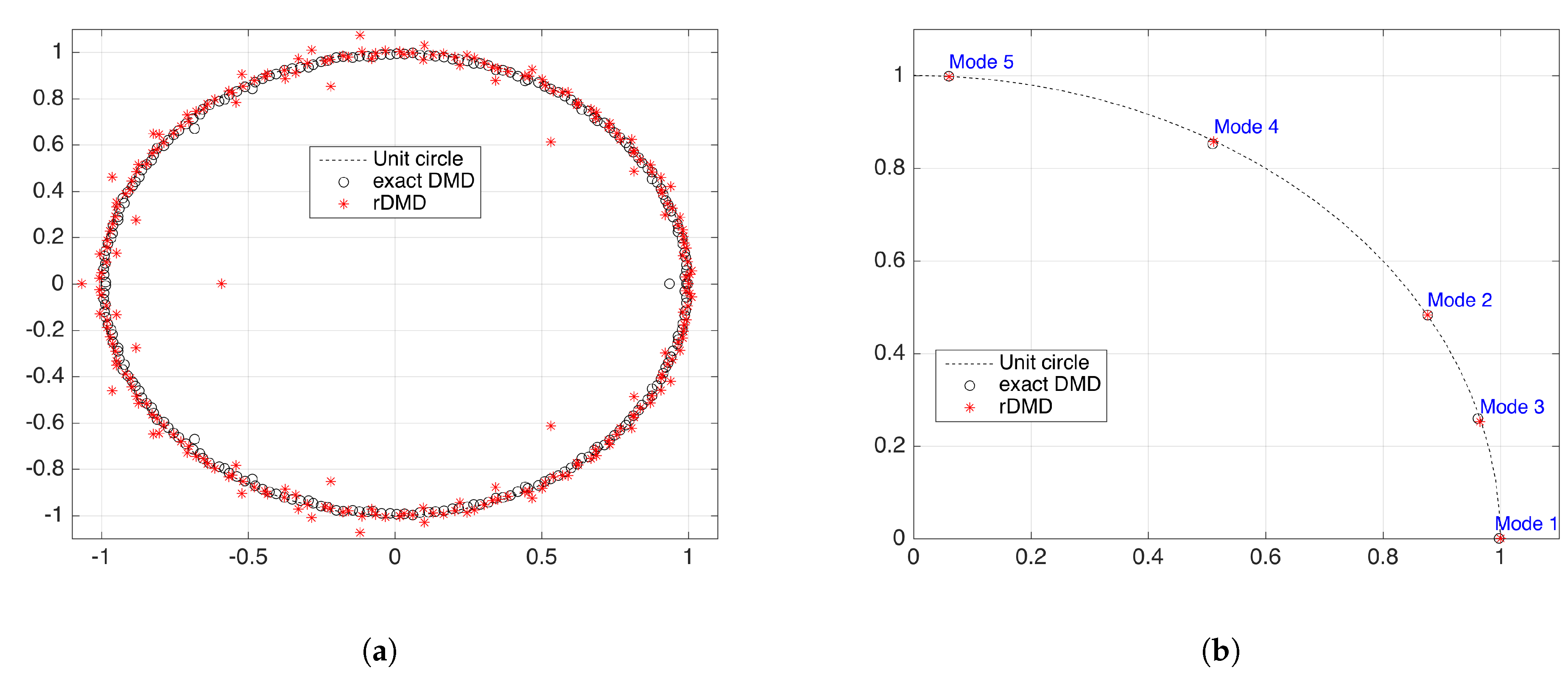
4.1. Logistic Map
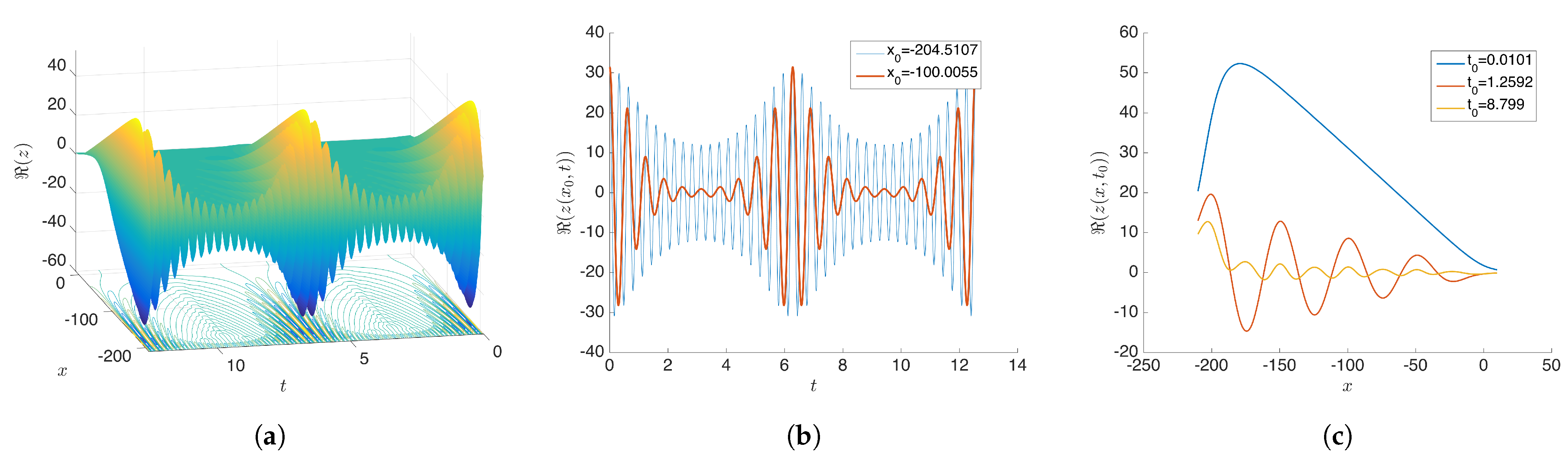
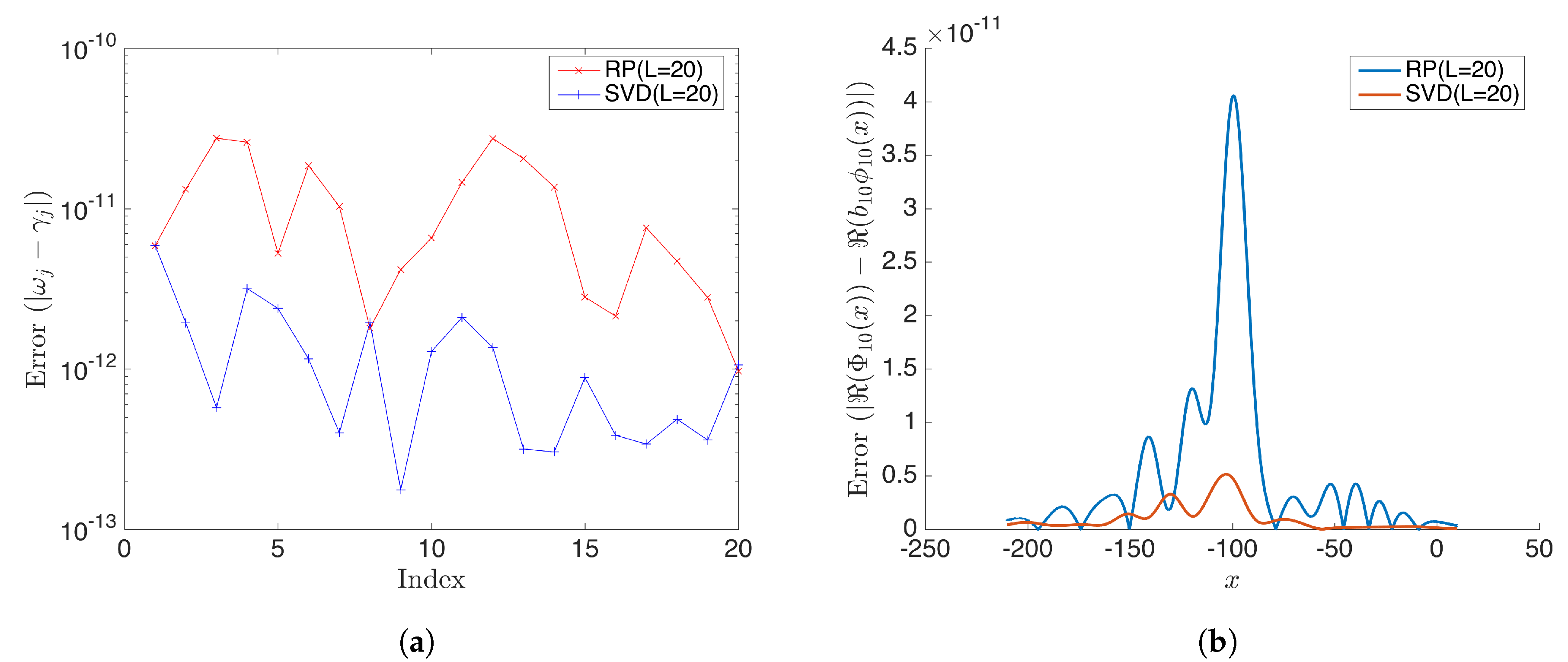
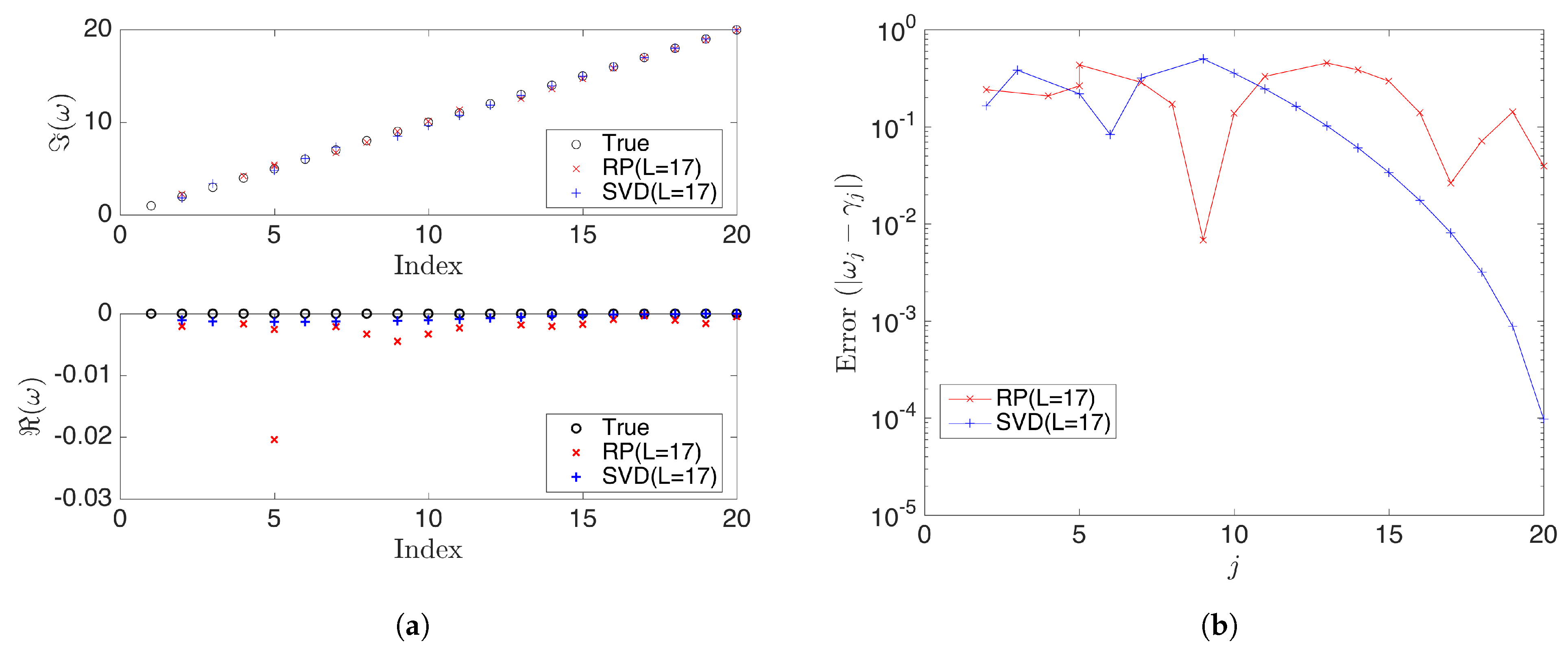
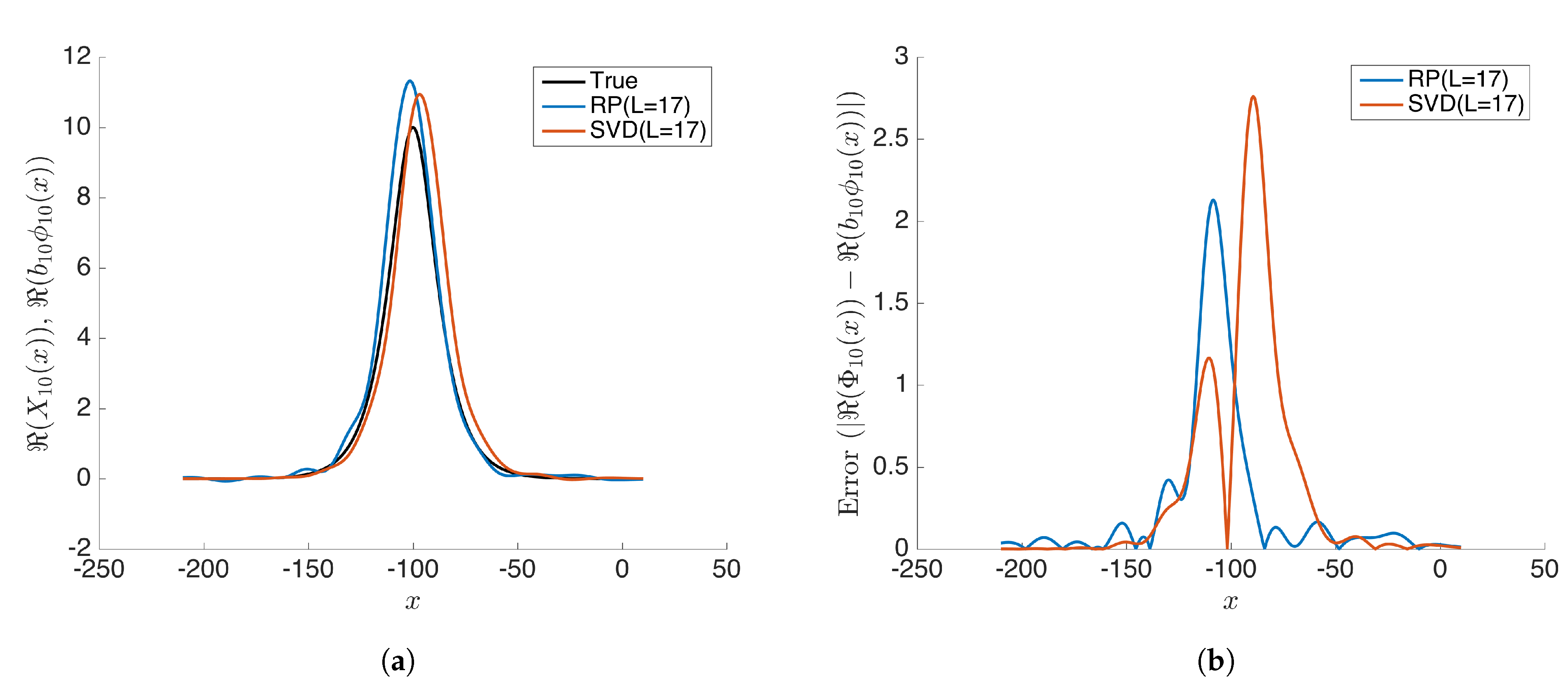
4.2. Toy Example: Demonstrates the Variable Separation and Isolating Dynamics
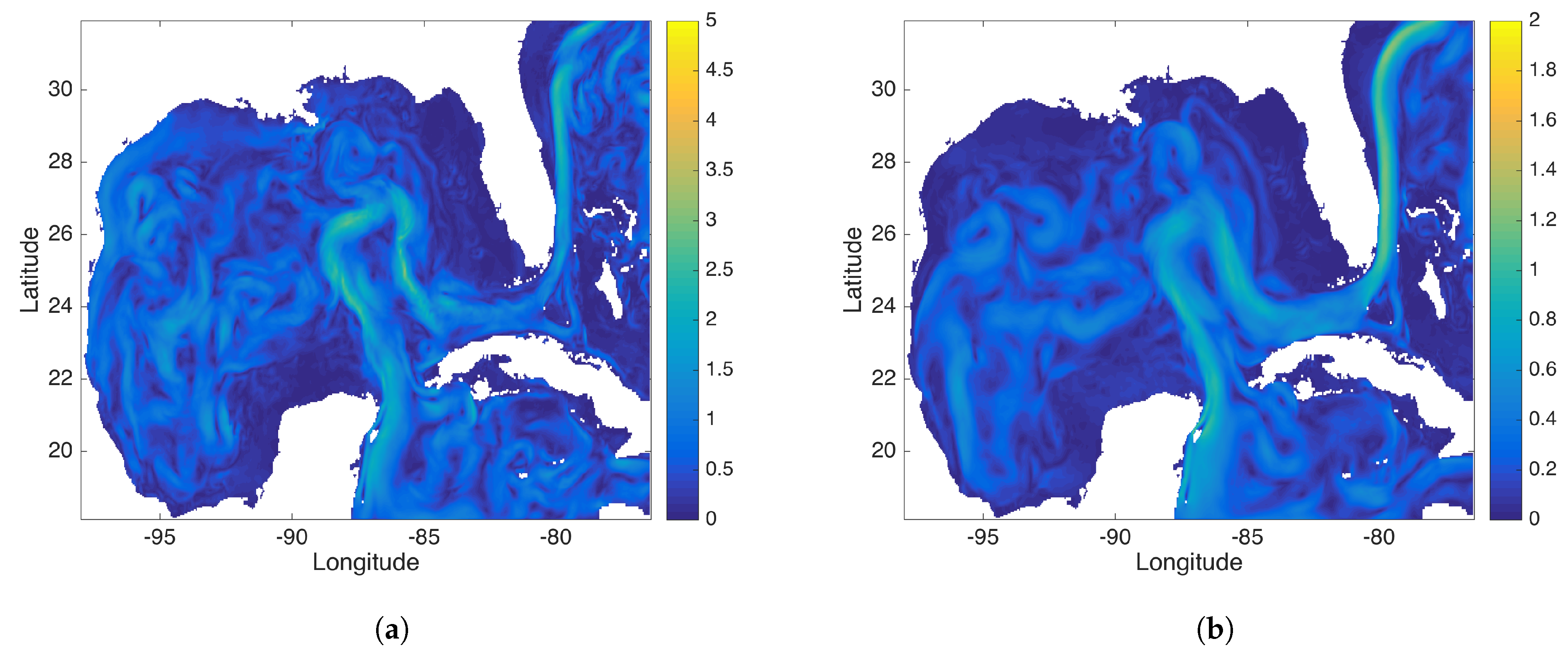
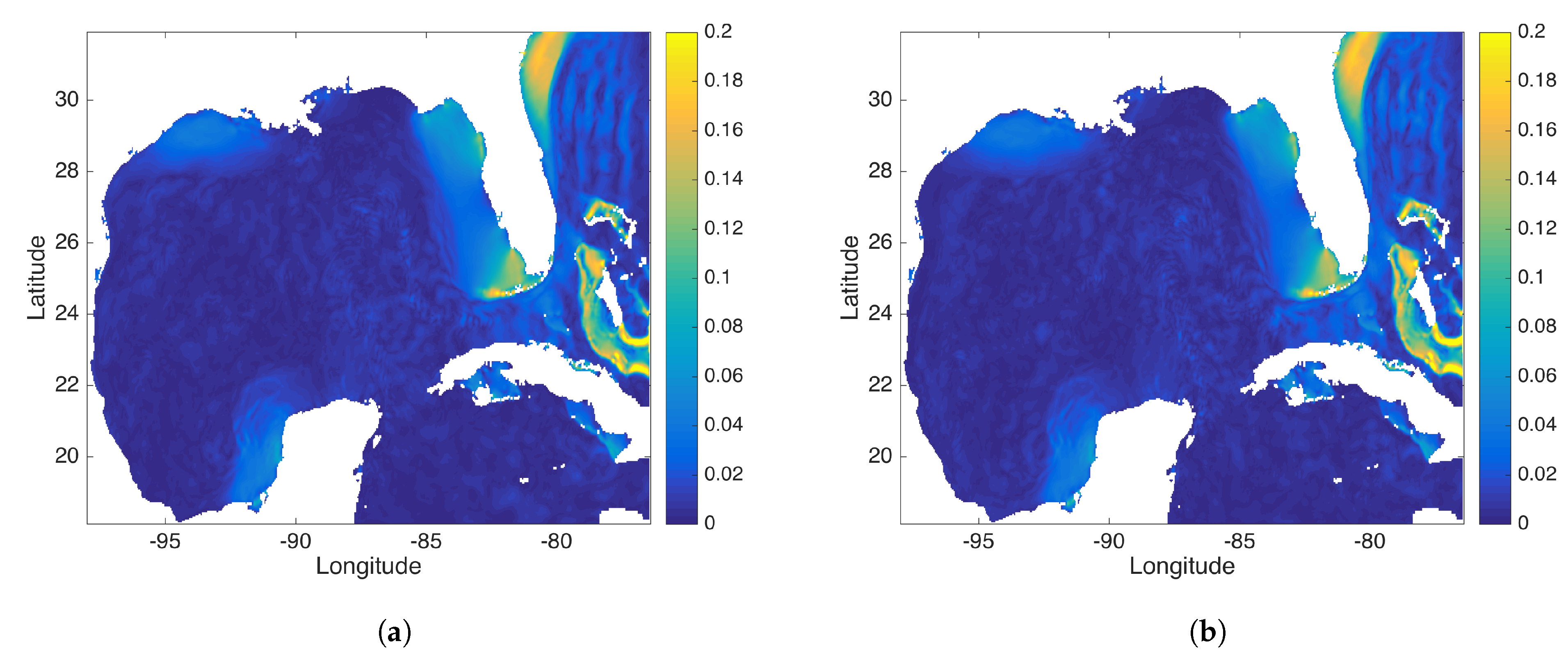
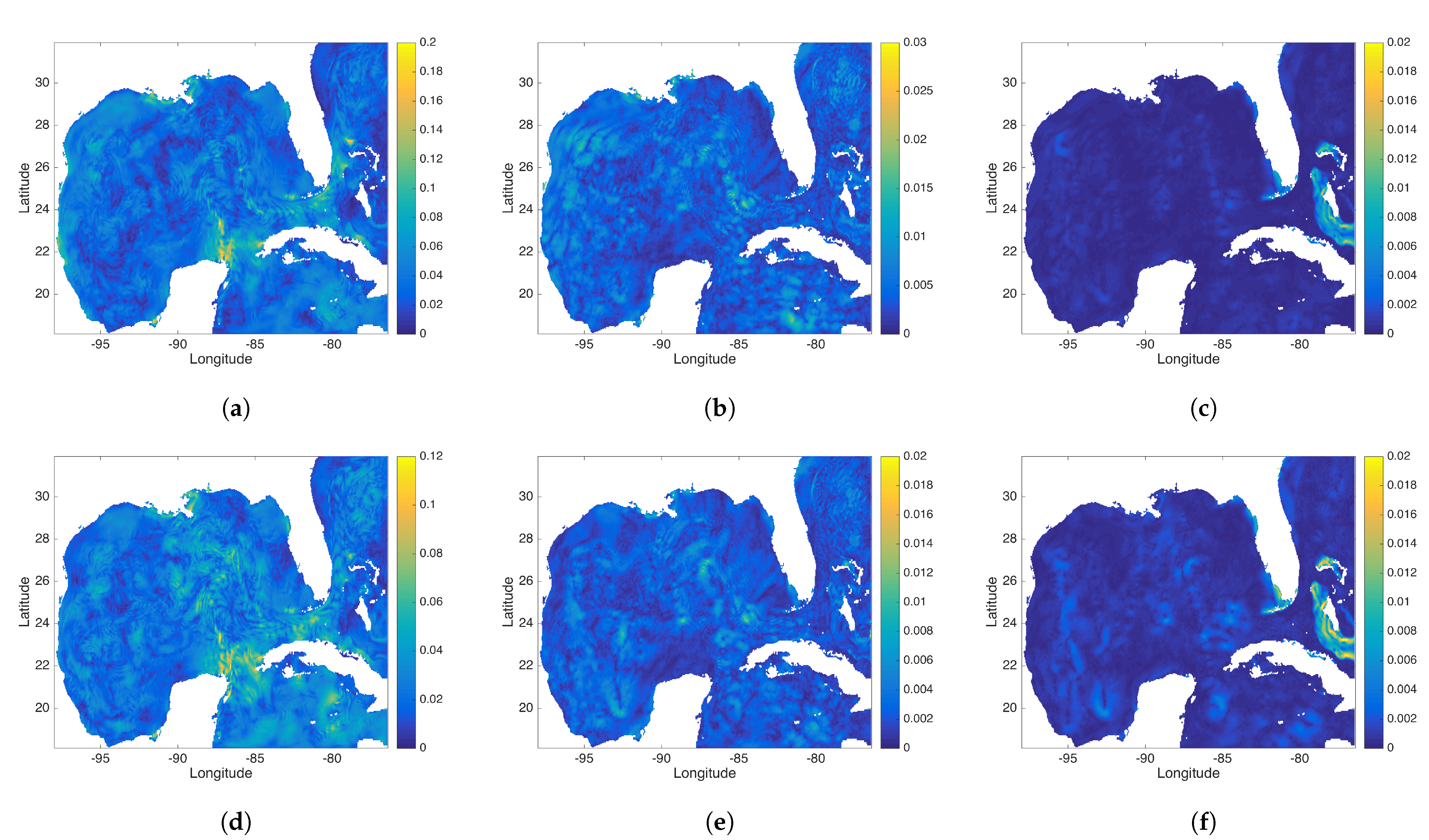
4.3. Gulf of Mexico
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DMD | dynamic mode decomposition |
| rDMD | randomized dynamic mode decomposition |
| SVD | singular value decomposition |
| RP | random projection |
| JL | Johnson–Lindenstrauss |
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | directory of open access journals |
References
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Rowley, C.W.; Mezić, I.; Bagheri, S.; Schlatter, P.; Henningson, D.S. Spectral analysis of nonlinear flows. J. Fluid Mech. 2009, 641, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Tu, J.H.; Rowley, C.W.; Luchtenburg, D.M.; Brunton, S.L.; Kutz, J.N. On dynamic mode decomposition: Theory and applications. J. Comput. Dyn. 2014, 1, 391–421. [Google Scholar] [CrossRef] [Green Version]
- Dasgupta, S. Experiments with Random Projection. In Proceedings of the 16th Conference on Uncertainty in Artificial Intelligence (UAI ’00), Stanford, CA, USA, 30 June–3 July 2000; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2000; pp. 143–151. [Google Scholar]
- Johnson, W.B.; Lindenstrauss, J.; Schechtman, G. Extensions of lipschitz maps into Banach spaces. Isr. J. Math. 1986, 54, 129–138. [Google Scholar] [CrossRef]
- Bingham, E.; Mannila, H. Random Projection in Dimensionality Reduction: Applications to Image and Text Data. In Proceedings of the Seventh ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD ’01), San Francisco, CA, USA, 26–29 August 2001; Association for Computing Machinery: New York, NY, USA, 2001; pp. 245–250. [Google Scholar]
- Koopman, B.O. Hamiltonian Systems and Transformation in Hilbert Space. Proc. Natl. Acad. Sci. USA 1931, 17, 315–318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bollt, E.M. Geometric considerations of a good dictionary for Koopman analysis of dynamical systems: Cardinality, “primary eigenfunction,” and efficient representation. Commun. Nonlinear Sci. Numer. Simul. 2021, 100, 105833. [Google Scholar] [CrossRef]
- Chen, K.K.; Tu, J.H.; Rowley, C.W. Variants of Dynamic Mode Decomposition: Boundary Condition, Koopman, and Fourier Analyses. J. Nonlinear Sci. 2012, 22, 887–915. [Google Scholar]
- McQuarrie, S.A.; Huang, C.; Willcox, K.E. Data-driven reduced-order models via regularised Operator Inference for a single-injector combustion process. J. R. Soc. N. Z. 2021, 51, 194–211. [Google Scholar] [CrossRef]
- Pan, S.; Arnold-Medabalimi, N.; Duraisamy, K. Sparsity-promoting algorithms for the discovery of informative Koopman-invariant subspaces. J. Fluid Mech. 2021, 917. [Google Scholar] [CrossRef]
- Achlioptas, D. Database-friendly random projections: Johnson–Lindenstrauss with binary coins. J. Comput. Syst. Sci. 2003, 66, 671–687, Special Issue on PODS 2001. [Google Scholar] [CrossRef] [Green Version]
- Kutz, N.J.; Brunton, S.L.; Brunton, B.W.; Proctor, J.L. Dynamic Mode Decomposition: Data-Driven Modeling of Complex Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2016. [Google Scholar]
- HYCOM + NCODA Gulf of Mexico 1/25° Analysis. 2021. Available online: https://www.hycom.org/data/gomu0pt04/expt-90pt1m000 (accessed on 28 October 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation and Abbreviations | Meaning |
|---|---|
| Koopman operator | |
| M | Number of snapshots |
| N | Number of observable |
| L | Dimension of the projected observable space |
| DMD on original space | |
| DMD on projected space | |
| X | Snapshot matrix: time stape 0 to M |
| Y | Snapshot matrix: time stape 0 to M |
| Projected snapshot matrices | |
| P | Projection matrix of dimension |
| R | Random projection matrix |
| Eigenvalue and eigenvector of | |
| Eigenvalue and eigenvector of | |
| DMD | Dynamic Mode Decomposition |
| SVD | Extended Dynamic Mode Decomposition |
| rDMD | randomized Dynamic Mode Decomposition |
| RP | Random Projection |
| JL | Johnson–Lindenstrauss |
| Method | Projected by | Computational Time (s) |
|---|---|---|
| Exact DMD | SVD | 521.09 |
| rDMD | Random Projection | 2.35 |
| Mode | Period (h) | Associated Feature | |
|---|---|---|---|
| DMD | rDMD | ||
| 1 | ∞ | ∞ | Gulf stream around the GOM (see Figure 12) |
| 2 | Semi-diurnal tidal constituents (see Figure 13) | ||
| 3 | Diurnal tidal constituents (see Figure 14) | ||
| 4 | Second harmonic to semi-diurnal tidal constituents (see Figure 14) | ||
| 5 | Third harmonic to semi-diurnal tidal constituents (see Figure 14) | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Surasinghe, S.; Bollt, E.M. Randomized Projection Learning Method for Dynamic Mode Decomposition. Mathematics 2021, 9, 2803. https://doi.org/10.3390/math9212803
Surasinghe S, Bollt EM. Randomized Projection Learning Method for Dynamic Mode Decomposition. Mathematics. 2021; 9(21):2803. https://doi.org/10.3390/math9212803
Chicago/Turabian StyleSurasinghe, Sudam, and Erik M. Bollt. 2021. "Randomized Projection Learning Method for Dynamic Mode Decomposition" Mathematics 9, no. 21: 2803. https://doi.org/10.3390/math9212803
APA StyleSurasinghe, S., & Bollt, E. M. (2021). Randomized Projection Learning Method for Dynamic Mode Decomposition. Mathematics, 9(21), 2803. https://doi.org/10.3390/math9212803