
Generalized Net Model of Forest Zone Monitoring by UAVs

 ,
,  ,
,  ,
,  ,
,  , ,
, ,  , and
, and 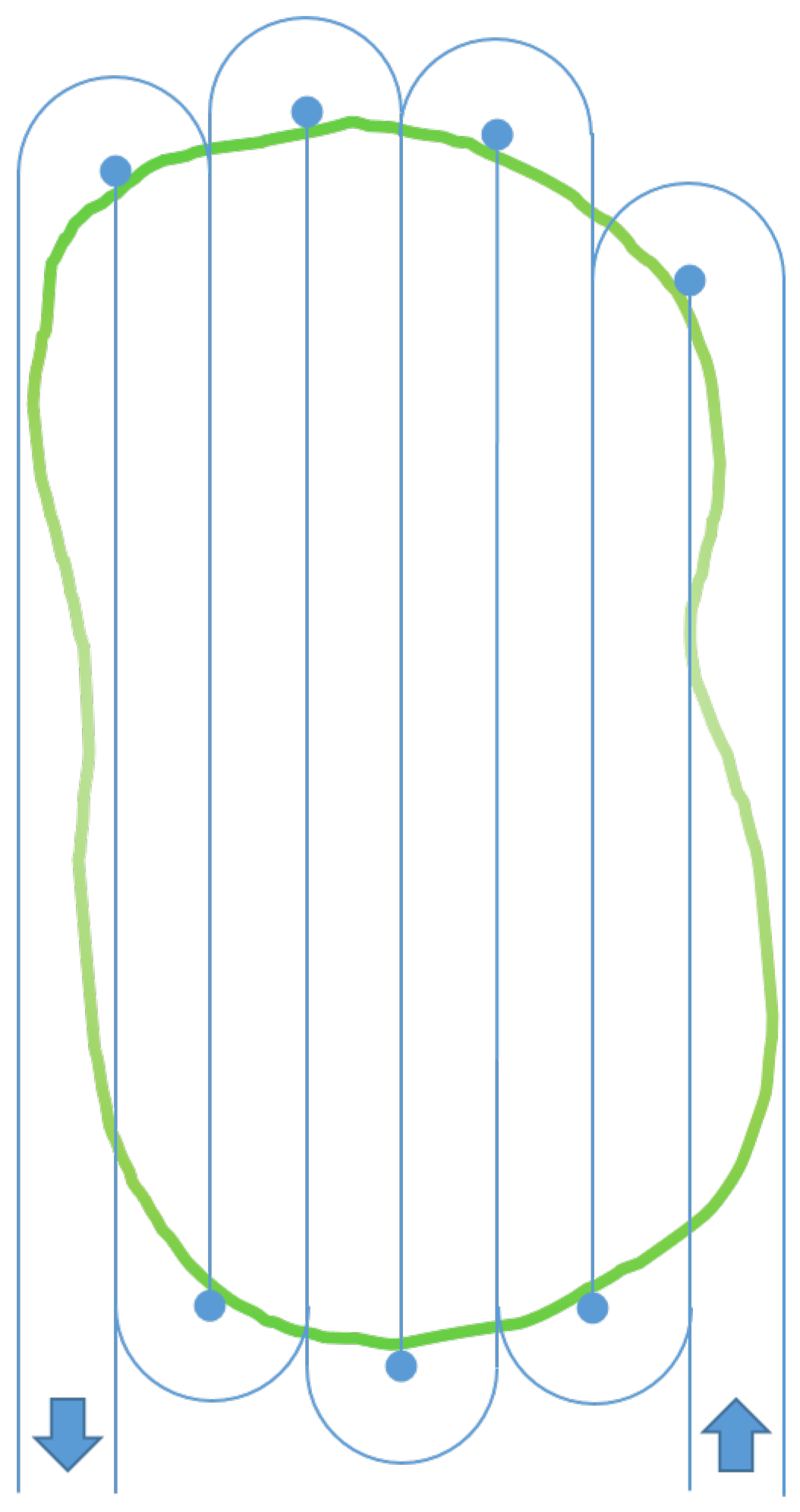{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
- drone resilience to unfavorable environmental influence;
- carrying capacity which allows for the transportation of necessary equipment (1–5 kg; in fire extinguishing, up to 30 kg);
- sufficient flight duration to explore a large perimeter of the observation zone (30–120 min);
- drone adaptability for installing (embedding) different types of video and sensory equipment (video cameras, thermovision cameras, LiDAR, sensor for air parameter analysis, mapping sensors, etc.);
- speed for approaching the object and precise positioning (for instance, 50–60 km/h for the approach, and capability for positioning the drone in the air over the object);
- ease of use (comfortable joystick for manipulation and helm or tablet for observation);
- price for acquisition, exploitation, and servicing.
- transmission speed from UAV to base station (depot, center of operations), which may reach 20 Mbit/s for high-resolution video streaming;
- distance of communication: required distance for ensuring lossless data transmission (e.g., 20 km);
- energy consumed for the communication;
- the size and weight of the device.
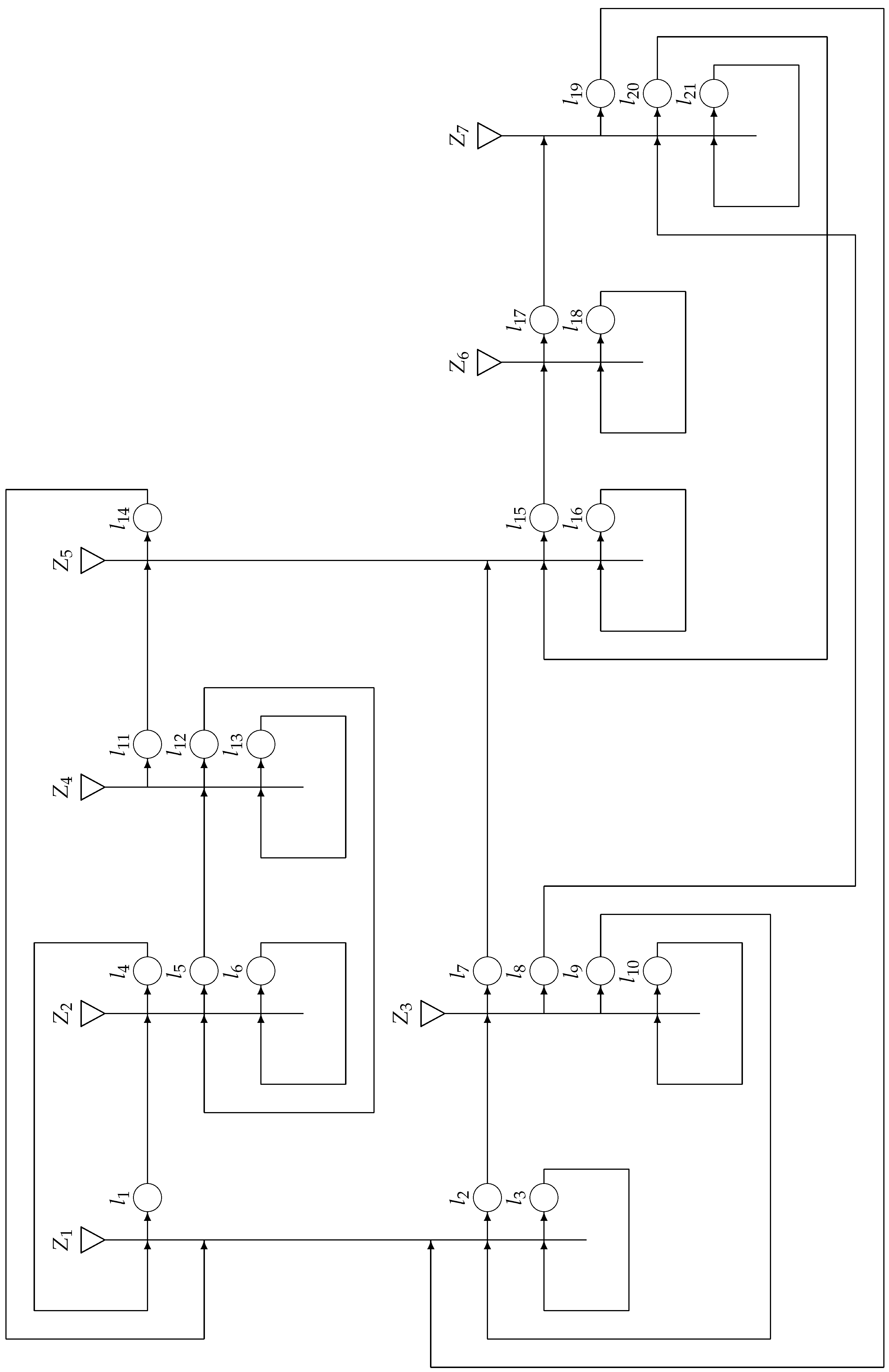
3. Description of Generalized Net Model of Forest Terrain Monitoring
- tokens, which represent the drones. First, they are in place , which denotes the drone depot or center of operation. Drones are either reconnaissance drone or specialized drone
- tokens, which represent the firefighting command located at place , and particular squad that attends the detected zone of the fire;
- tokens, which represent communicated signals from drones to the operational center and the firefighting command or from the firefighting squad at the fire site to the center of operation.
- “The moment for take-off of subsequent reconnaissance drone has come”;
- “There is a signal from the reconnaissance drone regarding the presence of potential danger”.
- “The fly-through of the region is completed, and no accidents have occurred”,
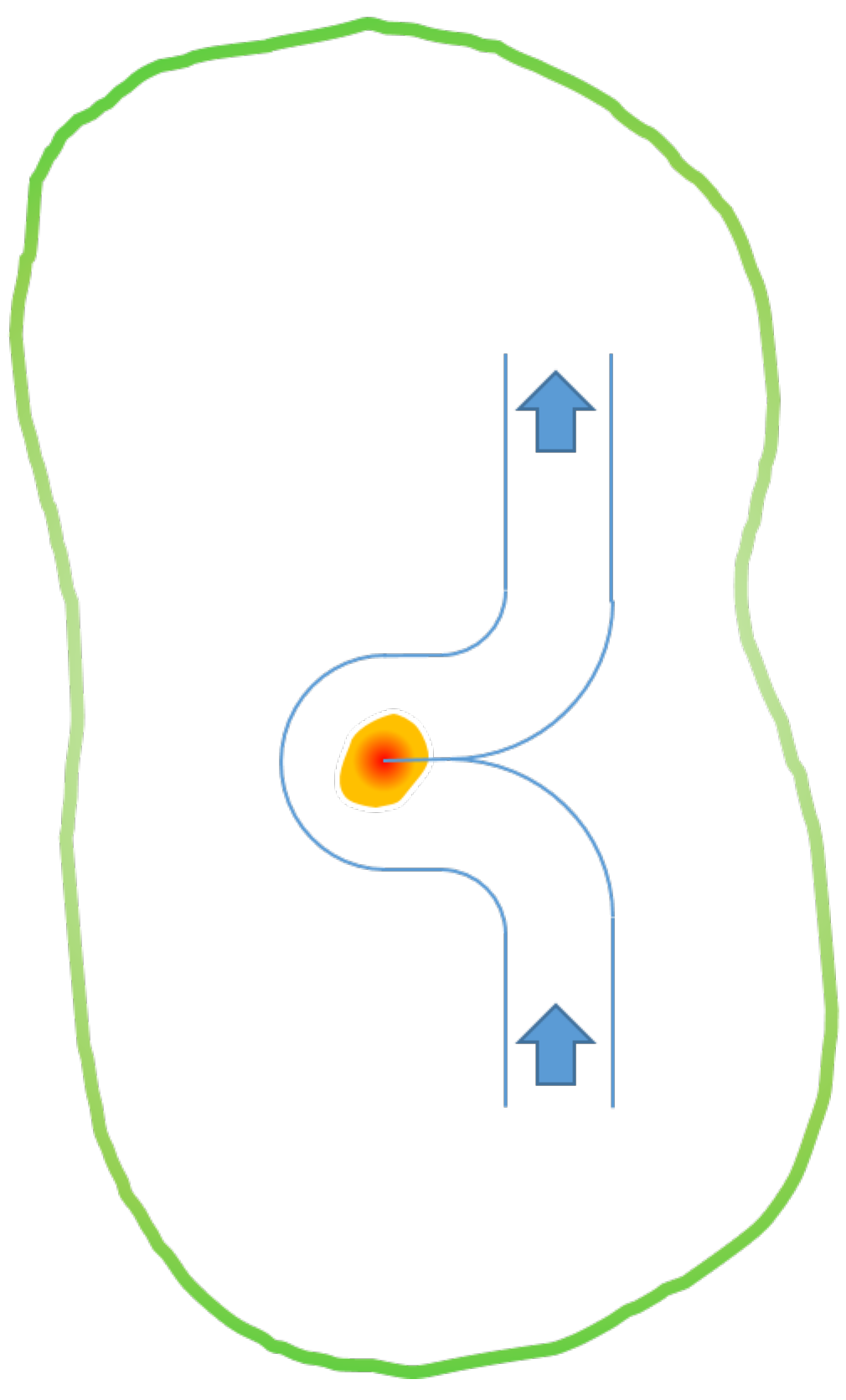
- “Detected fire or potential danger for its occurrence”,
- “The fly-through of the region has not been completed”.
- “Fire detected by reconnaissance drone”;
- “Additional information about the fire must be gathered”;
- “The task of the drone is completed”;
- “The drone is still traveling to the the area for observation”.
- “There is fire or potential danger of fire occurrence.”
- “The check for fire or potential danger of fire occurrence is complete”.
- “Fire is detected”.
- “The firefighting squad has arrived at the location of the fire”;
- “The firefighting squad is still on the way”.
- “Specialized drone must be dispatched to gather additional information”;
- “The fire is extinguished, and the firefighting squad must return to the base”;
- “The fire has not been extinguished yet”.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mccarty, J.L.; Aalto, J.; Paunu, V.-V.; Arnold, S.R.; Eckhardt, S.; Klimont, Z.; Fain, J.J.; Evangeliou, N.; Venäläinen, A.; Tchebakova, N.M.; et al. Reviews and syntheses: Arctic fire regimes and emissions in the 21st century. Biogeosciences 2021, 18, 5053–5083. [Google Scholar] [CrossRef]
- Sonkin, M.A.; Khamukhin, A.A.; Pogrebnoy, A.V.; Marinov, P.; Atanassova, V.; Roeva, O.; Atanassov, K.; Alexandrov, A. Intercriteria Analysis as Tool for Acoustic Monitoring of Forest for Early Detection Fires. Adv. Intell. Syst. Comput. 2021, 1081, 205–213. [Google Scholar] [CrossRef]
- Ambrosia, V.; Wegener, S.; Sullivan, D.; Buechel, S.; Brass, J.; Dunagan, S.; Stoneburner, J.; Schoenung, S. Demonstrating UAV—Acquired Real-Time Thermal Data over Fires. Photogramm. Eng. Remote Sens. 2002, 69, 391–402. [Google Scholar] [CrossRef]
- Ollero, A.; Ramiro Martinez-de Dios, J.; Merino, L. Unmanned Areal Vehicles Tools for Forest-Fire Fighting. For. Ecol. Manag. 2006, 234, 263–274. [Google Scholar] [CrossRef]
- Banu, T.; Borlea, G.; Banu, C. The use of drones in forestry. J. Environ. Sci. Eng. 2016, 5, 557–562. [Google Scholar] [CrossRef] [Green Version]
- Tsvetkov, I. The Unmanned Aerial Systems—A new generation technology with opportunities for various applications in forestry science and forestry practice. In Proceedings of the Proceeding Papers of Forest Research Institute, Sofia, Bulgaria, 11–12 April 2019; pp. 205–212. Available online: https://bit.ly/fri-bas-bg-150-god-ban (accessed on 7 October 2021). (In Bulgarian).
- Munawar, H.S.; Ullah, F.; Khan, S.I.; Qadir, Z.; Qayyum, S. UAV assisted spatiotemporal analysis and management of bushfires: A case study of the 2020 Victorian bushfires. Fire 2021, 4, 40. [Google Scholar] [CrossRef]
- Correia, A.; Santos, L.A.; Carvalho, P.; Martinho, J. The use of unmanned aerial vehicles in the monitoring of forest fires. Adv. Sci. Technol. Innov. 2020, 75–79. [Google Scholar] [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne optical and thermal remote sensing for wildfire detection and monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [Green Version]
- Moumgiakmas, S.S.; Samatas, G.G.; Papakostas, G.A. Computer vision for fire detection on UAVs—From software to hardware. Future Internet 2021, 13, 200. [Google Scholar] [CrossRef]
- Ciullo, V.; Rossi, L.; Pieri, A. Experimental fire measurement with UAV multimodal stereovision. Remote Sens. 2020, 12, 3546. [Google Scholar] [CrossRef]
- Mo, X.; Peters, D.; Lei, C. Low cost autonomous UAV swarm application in wildfire surveillance and suppression. In Proceedings of the ACM International Conference Proceeding Series, Jeju Island, Korea, 23–25 April 2021; pp. 164–169. [Google Scholar] [CrossRef]
- Christensen, B.; Herries, D.; Hartley, R.J.L.; Parker, R. UAS and smartphone integration at wildfire management in Aotearoa New Zealand. N. Z. J. For. Sci. 2021, 51, 10. [Google Scholar] [CrossRef]
- Chitkara, H. UPS has Received Landmark FAA Approval to Become the First-Ever Drone Service Operating as a Commercial Airline. Business Insider. 2 October 2019. Available online: https://www.businessinsider.com/ups-drone-service-gets-federal-aviation-administration-approval-2019-10 (accessed on 7 October 2021).
- Kurmi, I.; Schedl, D.C.; Bimber, O. Combined Person Classification with Airborne Optical Sectioning. arXiv 2021, arXiv:2106.10077. [Google Scholar]
- Schedl, D.C.; Kurmi, I.; Bimber, O. Search and rescue with airborne optical sectioning. Nat. Mach. Intell. 2020, 2, 783–790. [Google Scholar] [CrossRef]
- Xiang, T.-S.; Xia, G.-S.; Zhang, L.-P. Mini-Unmanned Aerial Vehicle-Based Remote Sensing: Techniques, Applications, and Prospects. IEEE Geosci. Remote Sens. Mag. 2019, 73. [Google Scholar] [CrossRef] [Green Version]
- Alexieva, J.; Choy, E.; Koycheva, E. Review and bibloigraphy on generalized nets theory and applications. In A Survey of Generalized Nets; Choy, E., Krawczak, M., Shannon, A., Szmidt, E., Eds.; Raffles KvB Monograph Series; Raffles KvB Institute Pty Ltd.: North Sydney, Australia, 2007; Volume 10, pp. 207–301. [Google Scholar]
- Atanassov, K. Generalized Nets; World Scientific: Singapore; London, UK, 1991. [Google Scholar]
- Atanassov, K. On Generalized Nets Theory; “Professor Marin Drinov” Academic Publishing House: Sofia, Bulgaria, 2007. [Google Scholar]
- Stratiev, D.D.; Stratiev, D.; Atanassov, K. Modelling the Process of Production of Diesel Fuels by the Use of Generalized Nets. Mathematics 2021, 9, 2351. [Google Scholar] [CrossRef]
- Atanassov, K. Index Matrices: Towards an Augmented Matrix Calculus; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Toledo-Castro, J.; Caballero-Gil, P.; Rodriguez-Perez, N.; Santos-Gonzalez, I.; Hernandez-Goya, G.; Aguasca-Colomo, R. Forest fire prevention, detection, and fighting based on fuzzy logic and wireless sensor networks. Complexity 2018, 2018, 1639715. [Google Scholar] [CrossRef]
- Dutta, M.; Bhowmik, S.; Giri, C. Fuzzy logic implementation for forest fire detection using wireless sensor network. In Advanced Computing, Networking and Informatics; Kumar Kundu, M., Mohapatra, D., Konar, A., Chakraborty, A., Eds.; Springer: Cham, Switzerland, 2014; Volume 1, pp. 319–327. [Google Scholar]
- Dorrer, G.; Yarovoy, S. Use of agent-based modeling for wildfire situations simulation. In Proceedings of the RPC 2018—Proceedings of the 3rd Russian-Pacific Conference on Computer Technology and Applications, Vladivostok, Russia, 18–25 August 2018. atr. no. 8481677. [Google Scholar] [CrossRef]
- Dorrer, G.A.; Yarovoy, S.V. Description of wildfires spreading and extinguishing with the aid of agent-based models. IOP Conf. Ser. Mater. Sci. Eng. 2020, 822, 012010. [Google Scholar] [CrossRef]
- Rodríguez Veiga, J.; Ginzo Villamayor, M.J.; Casas Méndez, B.V. Wildfire Resources Management: A Decision Support Tool Created with R to Solve Optimisation Models in Logistics for Fighting Forest Fires. SEMA SIMAI Springer Ser. 2021, 5, 227–246. [Google Scholar] [CrossRef]
- Wijayanto, A.; Sani, O.; Kartika, N.; Herdiyani, Y. Classification model for forest fire hotspot occurrences prediction using ANFIS algorithm. IOP Conf. Ser. Earth Environ. Sci. 2017, 54, 012059. [Google Scholar] [CrossRef]
- Zoteva, D.; Krawczak, M. Generalized nets as a tool for the modelling of data mining processes. A survey. Issues Intuitionistic Fuzzy Sets Gen. Nets 2017, 13, 1–60. [Google Scholar]
- Belcheva, S. IT specialists developed a system for early detection of fires using drones. Agri.bg. 25 October 2021. Available online: https://agri.bg/novini/it-spetsialisti-razrabotikha-sistema-za-ranno-otkrivane-na-gorski-pozhari-s-dronove (accessed on 7 October 2021). (In Bulgarian).
- EHang AAVs Completes High-Rise Fire Rescue Drill in Laixi City, Qingdao, China, 2 August 2021. EHang.com. Available online: https://www.ehang.com/news/801.html (accessed on 7 October 2021).
- Iliev, R.; Genchev, A. Possibilities for using unmanned aerial vehicles to obtain sensory information for environmental analysis. Inf. Secur. Int. J. 2020, 46, 127–140. [Google Scholar] [CrossRef]
- Genchev, A. Sensors and sensor technologies used UAVs. In Proceedings of the International Scientific Conference “Hemus 2018”, Proceedings, Plovdiv, Bulgaria, 30 May–2 June 2018; pp. II-174–II-188. (In Bulgarian). [Google Scholar]
- Stoianov, N.; Bozhilova, M. A Model of a Cyber Defence Awareness System of Campaigns with Malicious Information. Inf. Secur. Int. J. 2020, 46, 182–197. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atanassov, K.T.; Vassilev, P.; Atanassova, V.; Roeva, O.; Iliev, R.; Zoteva, D.; Bureva, V.; Mavrov, D.; Alexandrov, A. Generalized Net Model of Forest Zone Monitoring by UAVs. Mathematics 2021, 9, 2874. https://doi.org/10.3390/math9222874
Atanassov KT, Vassilev P, Atanassova V, Roeva O, Iliev R, Zoteva D, Bureva V, Mavrov D, Alexandrov A. Generalized Net Model of Forest Zone Monitoring by UAVs. Mathematics. 2021; 9(22):2874. https://doi.org/10.3390/math9222874
Chicago/Turabian StyleAtanassov, Krassimir T., Peter Vassilev, Vassia Atanassova, Olympia Roeva, Rosen Iliev, Dafina Zoteva, Veselina Bureva, Deyan Mavrov, and Alexander Alexandrov. 2021. "Generalized Net Model of Forest Zone Monitoring by UAVs" Mathematics 9, no. 22: 2874. https://doi.org/10.3390/math9222874
APA StyleAtanassov, K. T., Vassilev, P., Atanassova, V., Roeva, O., Iliev, R., Zoteva, D., Bureva, V., Mavrov, D., & Alexandrov, A. (2021). Generalized Net Model of Forest Zone Monitoring by UAVs. Mathematics, 9(22), 2874. https://doi.org/10.3390/math9222874