
CL-Net: ConvLSTM-Based Hybrid Architecture for Batteries’ State of Health and Power Consumption Forecasting




Abstract
:1. Introduction
- BESS becomes important to sustain the constancy of power supply to loads due to the fluctuating nature of RESs. The main contribution of this research is to forecast battery SOH in BESSs and power consumption through a hybrid DL-based framework. The accuracy of the SOH prediction is critical for ensuring batteries’ safety and lowering maintenance expenses. Similarly, modern energy management systems are needed that limit power outage to important loads by electricity consumption forecasting.
- Existing research has employed a variety of ML techniques to solve time series problems via handcrafted engineering mechanism features, but they have failed to deal with complicated time series data. To find the most efficient and effective sequential model, several models are examined to obtain the best combination of encoder and decoder networks for multi-step battery SOH and power consumption forecasting.
- To obtain effective forecasting results, the acquired raw data related to batteries and power consumption are first processed in a preprocessing step, where the missing values are handled using the replacement approach and normalized to expedite the model learning process.
- For battery SOH and power consumption prediction, a hybrid architecture of ConvLSTM and LSTM is presented, in which preprocessed data are passed through the ConvLSTM layers to extract spatiotemporal features in encoded form, which are then decoded by the LSTM layers for final forecasting.
- The proposed CL-Net architecture is demonstrated by a comprehensive ablation study using three distinct time series datasets and regression error metrics. The CL-Net reduces the error values up to 0.07, 0.13, and 0.135 for mean squared error (MSE), RMSE, and mean absolute error (MAE), respectively, on the NASA battery dataset. Similarly, on the IHEPC dataset, the CL-Net achieves lower values of 0.0012, 0.0052, and 0.0036 for the MSE, RMSE, and MAE, respectively, compared to the state-of-the-art. Finally, the CL-Net obtains 0.031, 0.176, and 0.169 values on the DEMS dataset for the MSE, RMSE, and MAE, respectively.
2. Literature Review
2.1. Experimental-Based Approaches
2.2. Battery Model-Based Approaches
2.3. Machine Learning-Based Approaches
3. Proposed Method
3.1. Data Acquisition and Refinement
3.2. Sequential Networks
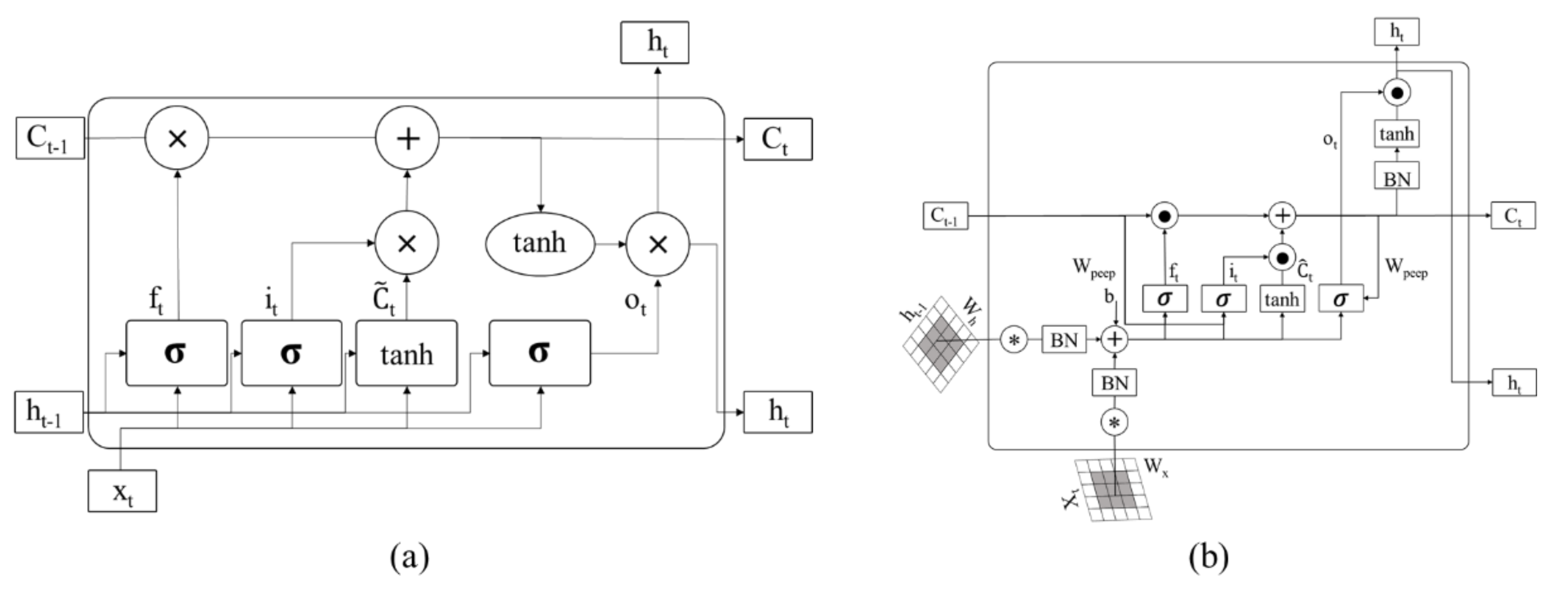
3.2.1. Long Short-Term Memory Network
3.2.2. Encoder–Decoder Network
3.2.3. CNN and LSTM Hybrid Network
3.2.4. Convolutional LSTM and LSTM Hybrid Network
4. Experimental Results
4.1. System Configuration and Implementation Details
4.2. Datasets
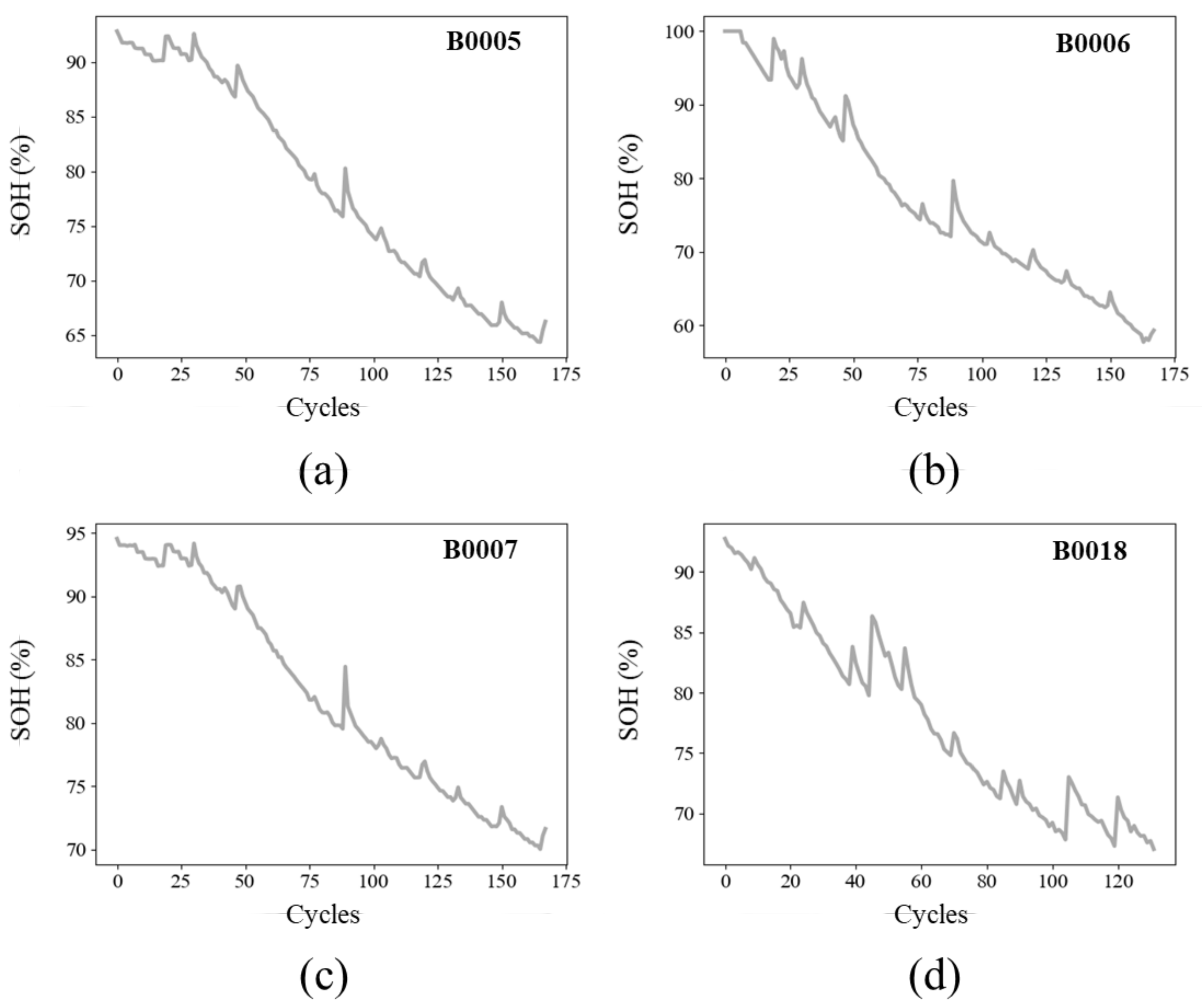
4.2.1. NASA Battery Dataset
4.2.2. Individual Household Electric Power Consumption Dataset
4.2.3. Domestic Energy Management System Dataset
4.3. Evaluation Metrics
4.4. Ablation Study on the NASA Battery Dataset
4.5. Ablation Study on the IHEPC Dataset
4.6. Ablation Study on the DEMS Dataset
4.7. Comparative Analysis Using the NASA Battery Dataset
4.8. Comparative Analysis Using the IHEPC Dataset
4.9. Time Complexity Analysis of the Sequential Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement.
Conflicts of Interest
Abbreviations
| Word | Description |
| BESS | Battery energy storage system |
| ConvLSTM | Convolutional long short-term memory |
| CEC | Constant error carousel |
| CNN | Convolutional neural network |
| DL | Deep learning |
| DEMS | Domestic energy management system |
| EIS | Electrochemical impedance spectroscopy |
| ESS | Energy storage system |
| FNN | Feedforward neural network |
| IHEPC | Individual household electric power consumption |
| KF | Kalman filter |
| Li-ion | Lithium-ion |
| NASA | National aeronautics and space administration |
| LSTM | Long short-term memory |
| LSF | Least square-based filters |
| MAE | Mean absolute error |
| ML | Machine learning |
| MSE | Mean squared error |
| RUL | Remaining useful life |
| RMSE | Root mean squared error |
| RES | Renewable energy source |
| RNN | Recurrent neural network |
| SOP | State of power |
| SOC | State of charge |
| SOH | State of health |
| EOL | End of life |
References
- Khan, N.; Ullah, F.U.M.; Haq, I.U.; Khan, S.U.; Lee, M.Y.; Baik, S.W. AB-Net: A Novel Deep Learning Assisted Framework for Renewable Energy Generation Forecasting. Mathematics 2021, 9, 2456. [Google Scholar] [CrossRef]
- Li, Y.; Zhong, S.; Zhong, Q.; Shi, K. Lithium-ion battery state of health monitoring based on ensemble learning. IEEE Access 2019, 7, 8754–8762. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of commercial lithium ion battery cycle life in electrical vehicle: Aging mechanism identification. J. Power Sources 2014, 251, 38–54. [Google Scholar] [CrossRef]
- Fan, Y.; Xiao, F.; Li, C.; Yang, G.; Tang, X. A novel deep learning framework for state of health estimation of lithium-ion battery. J. Energy Storage 2020, 32, 101741. [Google Scholar] [CrossRef]
- Wu, Y.; Xue, Q.; Shen, J.; Lei, Z.; Chen, Z.; Liu, Y. State of health estimation for lithium-ion batteries based on healthy features and long short-term memory. IEEE Access 2020, 8, 28533–28547. [Google Scholar] [CrossRef]
- Galeotti, M.; Giammanco, C.; Cinà, L.; Cordiner, S.; Carlo, A.D. Synthetic methods for the evaluation of the State of Health (SOH) of nickel-metal hydride (NiMH) batteries. Energy Convers. Manag. 2015, 92, 1–9. [Google Scholar] [CrossRef]
- Chen, Z.; Weng, C.; He, X.; Han, X.; Lu, L.; Ren, D.; Ouyang, M. Online state of health estimation for lithium-ion batteries based on support vector machine. Appl. Sci. 2018, 8, 925. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Chang, C.; Wang, Q.; Jiang, J.; Wu, T. Lithium-ion battery state of health estimation using the incremental capacity and wavelet neural networks with genetic algorithm. J. Energy Storage 2021, 38, 102570. [Google Scholar] [CrossRef]
- Yao, H.; Jia, X.; Zhao, Q.; Cheng, Z.; Guo, B. Novel lithium-ion battery state-of-health estimation method using a genetic programming model. IEEE Access 2020, 8, 95333–95344. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Li, X.; Wang, Z. State of health estimation for Li-Ion battery using incremental capacity analysis and Gaussian process regression. Energy 2020, 190, 116467. [Google Scholar] [CrossRef]
- Ezemobi, E.; Tonoli, A.; Silvagni, M. Battery State of Health Estimation with Improved Generalization Using Parallel Layer Extreme Learning Machine. Energies 2021, 14, 2243. [Google Scholar] [CrossRef]
- Tang, S.; Yu, C.; Wang, X.; Guo, X.; Si, X. Remaining useful life prediction of lithium-ion batteries based on the wiener process with measurement error. Energies 2014, 7, 520–547. [Google Scholar] [CrossRef] [Green Version]
- Si, X.-S. An adaptive prognostic approach via nonlinear degradation modeling: Application to battery data. IEEE Trans. Ind. Electron. 2015, 62, 5082–5096. [Google Scholar] [CrossRef]
- You, G.-w.; Park, S.; Oh, D. Real-time state-of-health estimation for electric vehicle batteries: A data-driven approach. Appl. Energy 2016, 176, 92–103. [Google Scholar] [CrossRef]
- Xu, X.; Yu, C.; Tang, S.; Sun, X.; Si, X.; Wu, L. State-of-health estimation for lithium-ion batteries based on Wiener process with modeling the relaxation effect. IEEE Access 2019, 7, 105186–105201. [Google Scholar] [CrossRef]
- Wang, K.; Gao, F.; Zhu, Y.; Liu, H.; Qi, C.; Yang, K.; Jiao, Q. Internal resistance and heat generation of soft package Li4Ti5O12 battery during charge and discharge. Energy 2018, 149, 364–374. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Wei, X.; Zhu, B.; Xu, W. Internal resistance identification in vehicle power lithium-ion battery and application in lifetime evaluation. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Hunan, China, 11–12 April 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Remmlinger, J.; Buchholz, M.; Meiler, M.; Bernreuter, P.; Dietmayer, K. State-of-health monitoring of lithium-ion batteries in electric vehicles by on-board internal resistance estimation. J. Power Sources 2011, 196, 5357–5363. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Schaeper, C.; Berger, J. Self-adapting on-board diagnostic algorithms for lithium-ion batteries. In Proceedings of the Advanced Battery Development for Automotive and Utility Applications and their Electric Power Grid Integration, Aachen, Germany, 1–2 March 2011. [Google Scholar]
- Schweiger, H.-G.; Obeidi, O.; Komesker, O.; Raschke, A.; Schiemann, M.; Zehner, C.; Gehnen, M.; Keller, M.; Birke, P. Comparison of several methods for determining the internal resistance of lithium ion cells. Sensors 2010, 10, 5604–5625. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chiang, Y.-H.; Sean, W.-Y.; Ke, J.-C. Online estimation of internal resistance and open-circuit voltage of lithium-ion batteries in electric vehicles. J. Power Sources 2011, 196, 3921–3932. [Google Scholar] [CrossRef]
- Matsushima, T. Deterioration estimation of lithium-ion cells in direct current power supply systems and characteristics of 400-Ah lithium-ion cells. J. Power Sources 2009, 189, 847–854. [Google Scholar] [CrossRef]
- Bueschel, P.; Troeltzsch, U.; Kanoun, O. Use of stochastic methods for robust parameter extraction from impedance spectra. Electrochim. Acta 2011, 56, 8069–8077. [Google Scholar] [CrossRef]
- Galeotti, M.; Cinà, L.; Giammanco, C.; Cordiner, S.; Carlo, A.D. Performance analysis and SOH (state of health) evaluation of lithium polymer batteries through electrochemical impedance spectroscopy. Energy 2015, 89, 678–686. [Google Scholar] [CrossRef]
- Ovejas, V.J.; Cuadras, A. Impedance characterization of an LCO-NMC/graphite cell: Ohmic conduction, SEI transport and charge-transfer phenomenon. Batteries 2018, 4, 43. [Google Scholar] [CrossRef] [Green Version]
- Din, E.; Schaef, C.; Moffat, K.; Stauth, J.T. A scalable active battery management system with embedded real-time electrochemical impedance spectroscopy. IEEE Trans. Power Electron. 2016, 32, 5688–5698. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Zhang, L.; Zou, C. State-of-health estimation for Li-ion batteries by combing the incremental capacity analysis method with grey relational analysis. J. Power Sources 2019, 410, 106–114. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; Wang, J.; He, H.; Peng, S.; Pecht, M. Lithium-ion battery health prognosis based on a real battery management system used in electric vehicles. IEEE Trans. Veh. Technol. 2018, 68, 4110–4121. [Google Scholar] [CrossRef]
- D’orazio, T.; Leo, M.; Distante, A. Automatic ultrasonic inspection for internal defect detection in composite materials. NDT E Int. 2008, 41, 145–154. [Google Scholar] [CrossRef]
- Kostecki, R.; McLarnon, F. Microprobe study of the effect of Li intercalation on the structure of graphite. J. Power Sources 2003, 119, 550–554. [Google Scholar] [CrossRef]
- Koltypin, M.; Cohen, Y.S.; Markovsky, B.; Cohen, Y. The study of lithium insertion–deinsertion processes into composite graphite electrodes by in situ atomic force microscopy (AFM). Electrochem. Commun. 2002, 4, 17–23. [Google Scholar] [CrossRef]
- Morigaki, K.-i.; Ohta, A. Analysis of the surface of lithium in organic electrolyte by atomic force microscopy, Fourier transform infrared spectroscopy and scanning auger electron microscopy. J. Power Sources 1998, 76, 159–166. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Santhanagopalan, S.; White, R.E. Online estimation of the state of charge of a lithium ion cell. J. Power Sources 2006, 161, 1346–1355. [Google Scholar] [CrossRef]
- Urbain, M.; Rael, S.; Davat, B.; Desprez, P. State estimation of a lithium-ion battery through kalman filter. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Pérez, G.; Garmendia, M.; Reynaud, J.F.; Crego, J. Enhanced closed loop State of Charge estimator for lithium-ion batteries based on Extended Kalman Filter. Appl. Energy 2015, 155, 834–845. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L. Battery state estimation using unscented kalman filter. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Couto, L.D.; Kinnaert, M. Partition-based unscented Kalman filter for reconfigurable battery pack state estimation using an electrochemical model. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Li, W.; Fan, Y.; Ringbeck, F.; Jöst, D. Electrochemical model-based state estimation for lithium-ion batteries with adaptive unscented Kalman filter. J. Power Sources 2020, 476, 228534. [Google Scholar] [CrossRef]
- Wang, S.; Fernandez, C.; Yu, C.; Fan, Y.; Cao, W.; Stroe, D.-I. A novel charged state prediction method of the lithium ion battery packs based on the composite equivalent modeling and improved splice Kalman filtering algorithm. J. Power Sources 2020, 471, 228450. [Google Scholar] [CrossRef]
- Prasad, G.K.; Rahn, C.D. Model based identification of aging parameters in lithium ion batteries. J. Power Sources 2013, 232, 79–85. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Vinassa, J.-M. Real-time SOC and SOH estimation for EV Li-ion cell using online parameters identification. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Todeschini, F.; Onori, S.; Rizzoni, G. An experimentally validated capacity degradation model for Li-ion batteries in PHEVs applications. IFAC Proc. Vol. 2012, 45, 456–461. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Dubé, Y. Characterization and modeling of a hybrid-electric-vehicle lithium-ion battery pack at low temperatures. IEEE Trans. Veh. Technol. 2015, 65, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Salkind, A.J.; Fennie, C.; Singh, P.; Atwater, T.; Reisner, D.E. Determination of state-of-charge and state-of-health of batteries by fuzzy logic methodology. J. Power Sources 1999, 80, 293–300. [Google Scholar] [CrossRef]
- Khan, N.; Ullah, F.U.M.; Afnan Ullah, A.; Lee, M.Y.; Baik, S.W. Batteries state of health estimation via efficient neural networks with multiple channel charging profiles. IEEE Access 2020, 9, 7797–7813. [Google Scholar] [CrossRef]
- Andre, D.; Nuhic, A.; Soczka-Guth, T.; Sauer, D.U. Comparative study of a structured neural network and an extended Kalman filter for state of health determination of lithium-ion batteries in hybrid electricvehicles. Eng. Appl. Artif. Intell. 2013, 26, 951–961. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C.; Gualous, H. Aging prediction and state of charge estimation of a LiFePO4 battery using input time-delayed neural networks. Electr. Power Syst. Res. 2017, 146, 189–197. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of charge and state of health estimation for lithium batteries using recurrent neural networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- You, G.-W.; Park, S.; Oh, D. Diagnosis of electric vehicle batteries using recurrent neural networks. IEEE Trans. Ind. Electron. 2017, 64, 4885–4893. [Google Scholar] [CrossRef]
- Veeraraghavan, A.; Adithya, V.; Bhave, A.; Akella, S. Battery aging estimation with deep learning. In Proceedings of the 2017 IEEE Transportation Electrification Conference (ITEC-India), Pune, India, 13–16 December 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Eddahech, A.; Briat, O.; Bertrand, N.; Delétage, J.-Y.; Vinassa, J.-M. Behavior and state-of-health monitoring of Li-ion batteries using impedance spectroscopy and recurrent neural networks. Int. J. Electr. Power Energy Syst. 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Kim, J.; Lee, S.; Cho, B. Complementary cooperation algorithm based on DEKF combined with pattern recognition for SOC/capacity estimation and SOH prediction. IEEE Trans. Power Electron. 2011, 27, 436–451. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, G. A support vector machine-based state-of-health estimation method for lithium-ion batteries under electric vehicle operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Saha, B.; Poll, S.; Goebel, K.; Christophersen, J. An integrated approach to battery health monitoring using Bayesian regression and state IEEE: Piscataway, NJ, USA, 2007.estimation. In Proceddings of the 2007 IEEE Autotestcon, Baltimore, MA, USA, 17–20 September 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- He, Z.; Gao, M.; Ma, G.; Liu, Y. Online state-of-health estimation of lithium-ion batteries using Dynamic Bayesian Networks. J. Power Sources 2014, 267, 576–583. [Google Scholar] [CrossRef]
- Sajjad, M.; Khan, S.U.; Khan, N.; Haq, I.U.; Ullah, A.; Lee, M.Y.; Baik, S.W. Towards efficient building designing: Heating and cooling load prediction via multi-output model. Sensors 2020, 20, 6419. [Google Scholar] [CrossRef] [PubMed]
- Khan, N.; Ullah, A.; Haq, I.U.; Menon, V.G.; Baik, S.W. SD-Net: Understanding overcrowded scenes in real-time via an efficient dilated convolutional neural network. J. Real-Time Image Process. 2021, 18, 1729–1743. [Google Scholar] [CrossRef]
- Ullah, F.U.M.; Muhammad, K.; Haq, I.U.; Khan, N.; Heidari, A.A.; Baik, S.W.; Albuquerque, V. AI assisted Edge Vision for Violence Detection in IoT based Industrial Surveillance Networks. IEEE Trans. Ind. Informatics. 2021, 1, 1. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Battery Data Set; NASA AMES Prognostics Data Repository: Washington, DC, USA, 2007. [Google Scholar]
- Hebrail, A.B.G. Individual Household Electric Power Consumption Data Set. 2012. Available online: https://archive.ics.uci.edu/ml/datasets/individual+household+electric+power+consumption (accessed on 29 December 2020).
- Marino, D.L.; Amarasinghe, K.; Manic, M. Building energy load forecasting using deep neural networks. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Kim, T.-Y.; Cho, S.-B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Cho, S.-B. Electric energy consumption prediction by deep learning with state explainable autoencoder. Energies 2019, 12, 739. [Google Scholar] [CrossRef] [Green Version]
- Khan, N.; Haq, I.U.; Khan, S.U.; Rho, S.; Lee, M.Y.; Baik, S.W. DB-Net: A novel dilated CNN based multi-step forecasting model for power consumption in integrated local energy systems. Int. J. Electr. Power Energy Syst. 2021, 133, 107023. [Google Scholar] [CrossRef]
- Ullah, F.U.M.; Khan, N.; Hussain, T.; Lee, M.F.; Baik, S.W. Diving Deep into Short-Term Electricity Load Forecasting: Comparative Analysis and a Novel Framework. Mathematics 2021, 9, 611. [Google Scholar] [CrossRef]
- Haq, I.U.; Ullah, A.; Khan, S.U.; Khan, N.; Lee, M.Y.; Rho, S.; Baik, S.W. Sequential learning-based energy consumption prediction model for residential and commercial sectors. Mathematics 2021, 9, 605. [Google Scholar] [CrossRef]
- Bu, S.-J.; Cho, S.-B. Time series forecasting with multi-headed attention-based deep learning for residential energy consumption. Energies 2020, 13, 4722. [Google Scholar] [CrossRef]
- Khan, S.U.; Haq, I.U.; Khan, Z.A.; Khan, N.; Lee, M.Y.; Baik, S.W. Atrous Convolutions and Residual GRU Based Architecture for Matching Power Demand with Supply. Sensors 2021, 21, 7191. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attributes | Description |
|---|---|
| Date | This variable represents the date when the data was recorded. The date is comprised of years, months, and days. |
| Time | This variable contains the values measured in hours, minutes, and seconds where the row-to-row jump is one minute. |
| Global active power | This attribute shows the overall active power consumed by the appliances and is represented by the GAP. The GAP is measured in kilowatts. |
| Global reactive power | This attribute shows the overall reactive power, and its symbol is GRP. The GRP is also measured in kilowatts. |
| Voltage | This attribute is measured in volts and is represented by V. |
| Global intensity | This variable shows the overall intensity of the current and is represented by GI. The GI is measured in amperes. |
| Sub_metering_S1 | The power energy consumed by the devices in the kitchen such as microwave, dishwasher, etc. It is measured in watt-hour. |
| Sub_metering_S2 | The power energy consumed by the machineries in the laundry room such as refrigerator and washing machine, and is measured in watt-hour. |
| Sub_metering_S3 | The power energy consumed by the water cooler and air-conditioner, and it is also measured in watt-hour. |
| Method | MSE | RMSE | MAE |
|---|---|---|---|
| LSTM | 0.067 | 0.259 | 0.209 |
| Encoder–decoder | 0.049 | 0.221 | 0.172 |
| CNN-LSTM | 0.061 | 0.247 | 0.195 |
| Proposed method | 0.042 | 0.205 | 0.151 |
| Method | MSE | RMSE | MAE |
|---|---|---|---|
| LSTM | 0.027 | 0.164 | 0.099 |
| Encoder–decoder | 0.019 | 0.137 | 0.091 |
| CNN-LSTM | 0.021 | 0.145 | 0.092 |
| Proposed method | 0.015 | 0.122 | 0.088 |
| Method | MSE | RMSE | MAE |
|---|---|---|---|
| LSTM | 0.045 | 0.212 | 0.194 |
| Encoder–decoder | 0.036 | 0.190 | 0.173 |
| CNN-LSTM | 0.039 | 0.197 | 0.179 |
| Proposed method | 0.031 | 0.176 | 0.169 |
| Ref | Method | MSE | RMSE | MAE |
|---|---|---|---|---|
| [11] | Gaussian process regression | 1.030 | 1.015 | 0.387 |
| [9] | GA-WNN | --- | --- | 1.655 |
| WNN | --- | --- | 3.320 | |
| BP | --- | --- | 7.530 | |
| SVM | --- | --- | 4.697 | |
| [12] | PL-ELM | 0.112 | 0.335 | 0.286 |
| ELM | 1.124 | 1.060 | 0.676 | |
| Proposed method | 0.042 | 0.205 | 0.151 | |
| Ref | Method | MSE | RMSE | MAE |
|---|---|---|---|---|
| [64] | Seq2Seq | --- | 0.625 | --- |
| [65] | CNN-LSTM | 0.3549 | 0.5957 | 0.3317 |
| [66] | Explainable autoencoder | 0.3840 | --- | 0.3953 |
| [67] | DB-Net | 0.0162 | 0.1272 | 0.0916 |
| [68] | M-LSTM | 0.1087 | 0.3296 | 0.3086 |
| [69] | Hybrid DL netwok | 0.105 | 0.324 | 0.311 |
| [70] | Multi-headed attention model | 0.2662 | --- | --- |
| [71] | RGRU-based hybrid model | 0.17 | 0.41 | 0.26 |
| Proposed method | 0.015 | 0.122 | 0.088 | |
| Method | NASA Dataset | IHEPC Dataset | DEMS Dataset | |||
|---|---|---|---|---|---|---|
| Training Time (s) | Testing Time (s) | Training Time (s) | Testing Time (s) | Training Time (s) | Testing Time (s) | |
| LSTM | 3.18 | 0.45 | 87.16 | 13.96 | 146.22 | 30.58 |
| Encoder–decoder | 5.61 | 0.69 | 225.22 | 16.77 | 405.18 | 33.80 |
| CNN-LSTM | 3.36 | 0.57 | 126.03 | 14.23 | 222.28 | 28.57 |
| Proposed method | 3.05 | 0.41 | 51.88 | 13.74 | 87.37 | 26.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, N.; Haq, I.U.; Ullah, F.U.M.; Khan, S.U.; Lee, M.Y. CL-Net: ConvLSTM-Based Hybrid Architecture for Batteries’ State of Health and Power Consumption Forecasting. Mathematics 2021, 9, 3326. https://doi.org/10.3390/math9243326
Khan N, Haq IU, Ullah FUM, Khan SU, Lee MY. CL-Net: ConvLSTM-Based Hybrid Architecture for Batteries’ State of Health and Power Consumption Forecasting. Mathematics. 2021; 9(24):3326. https://doi.org/10.3390/math9243326
Chicago/Turabian StyleKhan, Noman, Ijaz Ul Haq, Fath U Min Ullah, Samee Ullah Khan, and Mi Young Lee. 2021. "CL-Net: ConvLSTM-Based Hybrid Architecture for Batteries’ State of Health and Power Consumption Forecasting" Mathematics 9, no. 24: 3326. https://doi.org/10.3390/math9243326
APA StyleKhan, N., Haq, I. U., Ullah, F. U. M., Khan, S. U., & Lee, M. Y. (2021). CL-Net: ConvLSTM-Based Hybrid Architecture for Batteries’ State of Health and Power Consumption Forecasting. Mathematics, 9(24), 3326. https://doi.org/10.3390/math9243326