Design of Constrained Robust Controller for Active Suspension of In-Wheel-Drive Electric Vehicles


Abstract
:1. Introduction
2. Active Suspension System Model
3. Constrained Robust H∞ Controller Design
4. Simulation and Analysis
4.1. Frequency Responses
4.2. Random Road Excitation
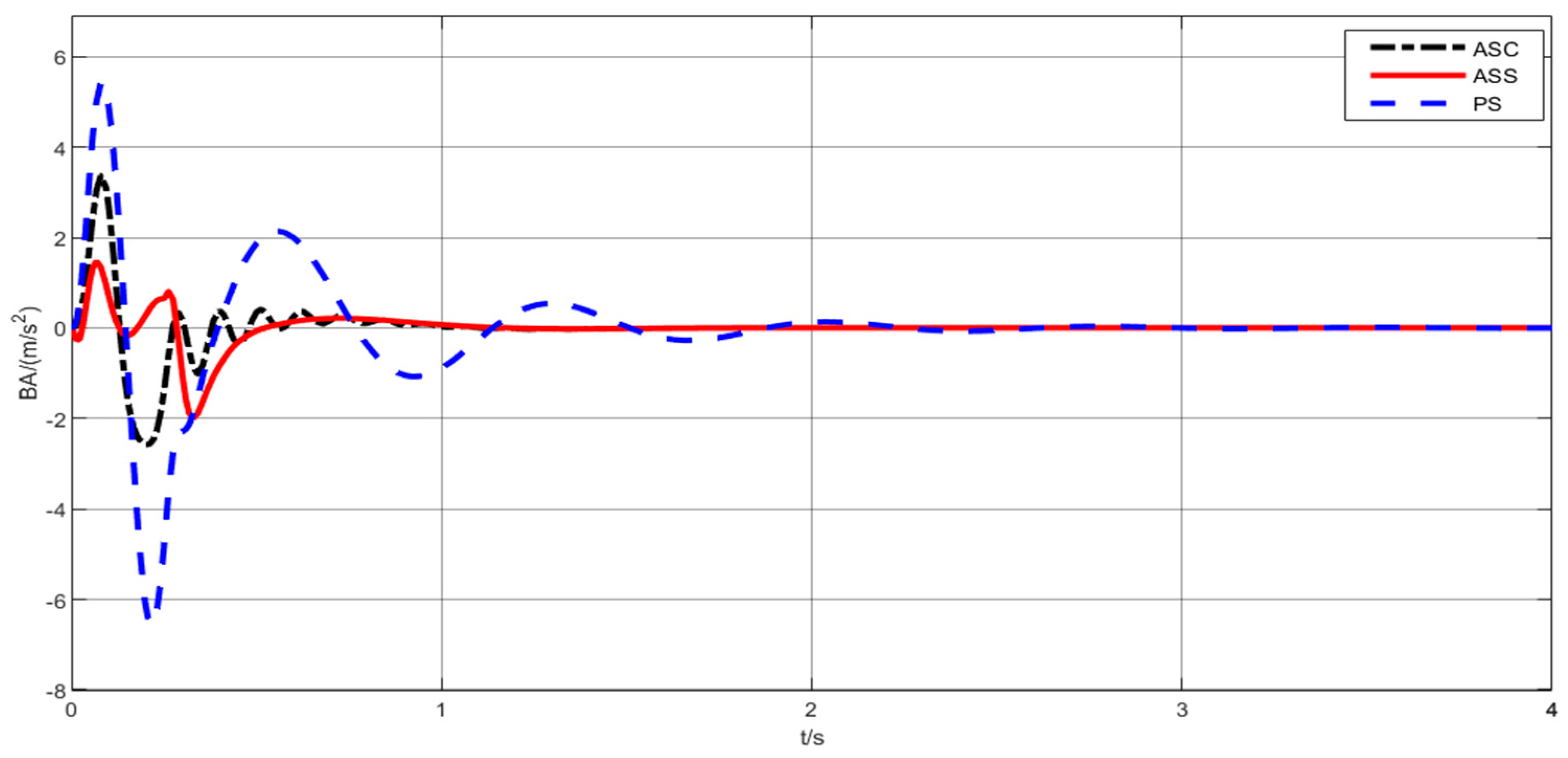
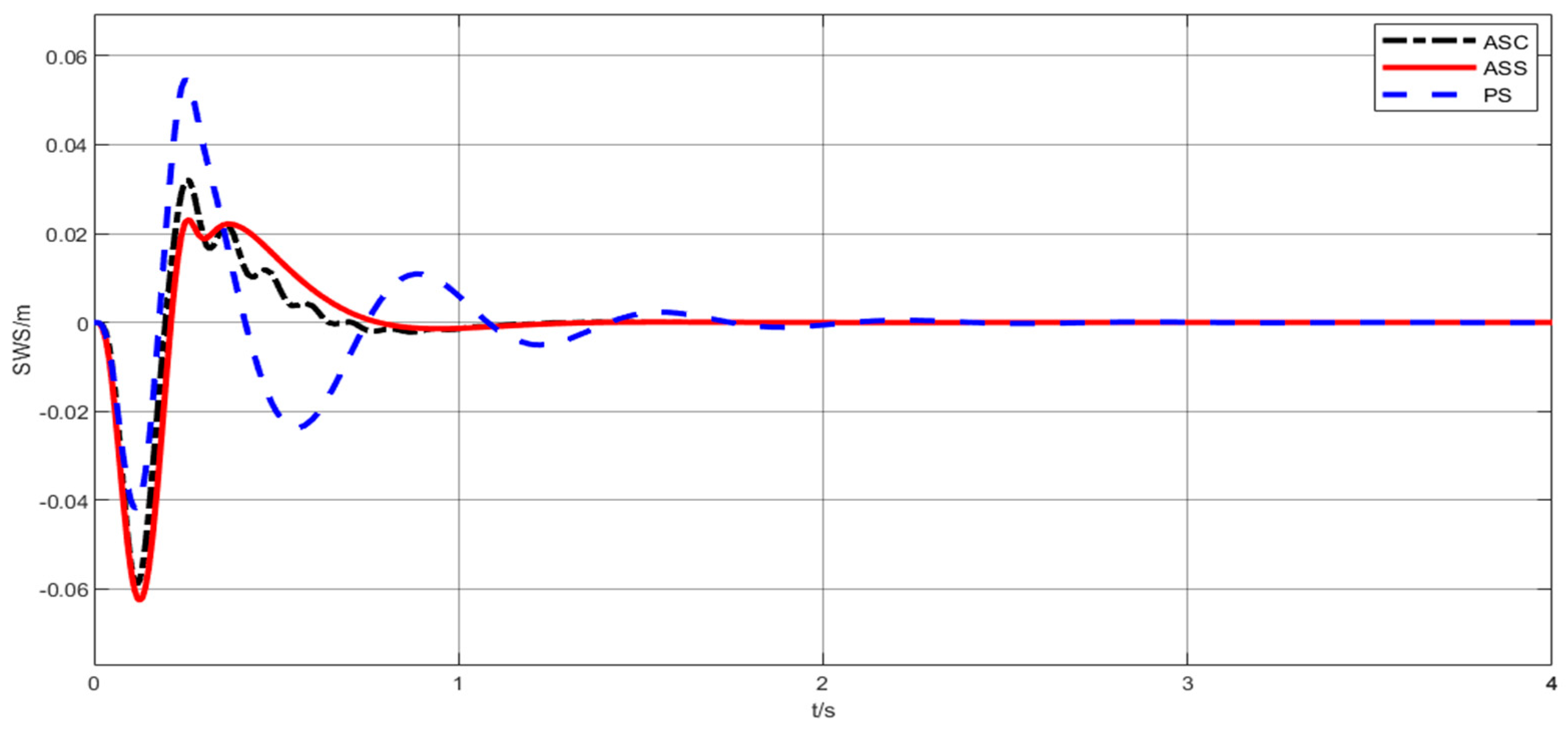
4.3. Bump Road Excitation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, X.; Yu, Z.; Yin, G.; Wang, J. Improving vehicle handling stability based on combined AFS and DYC system via robust Takagi-Sugeno fuzzy control. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2696–2707. [Google Scholar] [CrossRef]
- Goodarzi, A.; Esmailzadeh, E. Design of a VDC system for all-wheel independent drive vehicles. IEEE/ASME Trans. Mechatron. 2007, 12, 632–639. [Google Scholar] [CrossRef]
- Chen, Y.; Hedrick, J.K.; Guo, K. A novel direct yaw moment controller for in-wheel motor electric vehicles. Veh. Syst. Dyn. 2013, 51, 925–942. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Chen, J.; Chen, N. Robust guaranteed cost state-delayed control of yaw stability for four-wheel-independent-drive electric vehicles with active front steering system. Int. J. Veh. Design. 2015, 69, 304–323. [Google Scholar] [CrossRef]
- Zheng, B.; Anwar, S. Yaw stability control of a steer-by-wire equipped vehicle via active front wheel steering. Mechatronics 2009, 19, 799–804. [Google Scholar] [CrossRef]
- Nam, K.; Fujimoto, H.; Hori, Y. Advanced motion control of electric vehicles based on robust lateral tire force control via active front steering. IEEE/ASME Trans. Mechatron. 2012, 19, 289–299. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles. IEEE Trans. Veh. Technol. 2015, 65, 4033–4043. [Google Scholar] [CrossRef]
- Poussot-Vassal, C.; Sename, O.; Dugard, L.; Savaresi, S.M. Vehicle dynamic stability improvements through gain-scheduled steering and braking control. Veh. Syst. Dyn. 2011, 49, 1597–1621. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Wang, Z.; Peng, W. Coordinated control of AFS and DYC for vehicle handling and stability based on optimal guaranteed cost theory. Veh. Syst. Dyn. 2009, 47, 57–79. [Google Scholar] [CrossRef]
- Ivanov, V.; Savitski, D.; Shyrokau, B. A survey of traction control and antilock braking systems of full electric vehicles with individually controlled electric motors. IEEE Trans. Veh. Technol. 2014, 64, 3878–3896. [Google Scholar] [CrossRef]
- Han, K.; Lee, B.; Choi, S.B. Development of an antilock brake system for electric vehicles without wheel slip and road friction information. IEEE Trans. Veh. Technol. 2019, 68, 5506–5517. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Zeng, X.; Chen, J. Robust Gain-scheduled Output Feedback Yaw Stability Control for Four-Wheel-Independent-Drive Electric Vehicles with External Yaw-Moment. J. Frankl. Inst. 2018, 355, 9271–9297. [Google Scholar] [CrossRef]
- Luo, Y.; Tan, D. Study on the dynamics of the in-wheel motor system. IEEE Trans. Veh. Technol. 2012, 61, 3510–3518. [Google Scholar]
- Bridgestone, C. Bridgestone Dynamic-Damping In-Wheel Motor Drive System. 2017. Available online: http://enginuitysystems.com/files/In-Wheel_Motor.pdf (accessed on 25 December 2017).
- Kulkarni, A.; Ranjha, S.A.; Kapoor, A. A quarter-car suspension model for dynamic evaluations of an in-wheel electric vehicle. Proc. Inst. Mech. Eng. Part D 2018, 232, 1139–1148. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, L.; Yu, Y.; Zhou, C. Analytical description of ride comfort and optimal damping of cushion-suspension for wheel-drive electric vehicles. Int. J. Autom. Technol. 2017, 18, 1121–1129. [Google Scholar] [CrossRef]
- Wang, W.; Niu, M.; Song, Y. Integrated Vibration Control of In-Wheel Motor-Suspensions Coupling System via Dynamics Parameter Optimization. Shock. Vib. 2019, 2019, 3702919. [Google Scholar] [CrossRef] [Green Version]
- Yin, G.; Chen, N.; Li, P. Improving Handling Stability Performance of Four-Wheel Steering Vehicle via mu-Synthesis Robust Control. IEEE Trans. Veh. Technol. 2007, 56, 2432–2439. [Google Scholar] [CrossRef]
- Karimi, H.R.; Duffie, N.A.; Dashkovskiy, S. Local capacity H∞ control for production networks of autonomous work systems with time-varying delays. IEEE Trans. Autom. Sci. Eng. 2009, 7, 849–857. [Google Scholar] [CrossRef]
- Shi, Y.; Yu, B. Output feedback stabilization of networked control systems with random delays modeled by Markov chains. IEEE Trans. Autom. Control. 2009, 54, 1668–1674. [Google Scholar]
- Qiu, J.; Ding, S.X.; Gao, H.; Yin, S. Fuzzy-Model-Based Reliable Static Output Feedback H∞ Control of Nonlinear Hyperbolic PDE Systems. IEEE Trans. Fuzzy Syst. 2016, 24, 388–400. [Google Scholar] [CrossRef]
- Kwon, B.S.; Kang, D.; Yi, K. Fault-tolerant control with state and disturbance observers for vehicle active suspension systems. Proc. Inst. Mech. Eng. D J. Autom. Eng. 2020, 234, 1912–1929. [Google Scholar] [CrossRef]
- Du, H.; Zhang, N. Designing H∞/GH2 static-output feedback controller for vehicle suspensions using linear matrix inequalities and genetic algorithms. Veh. Syst. Dyn. 2008, 46, 385–412. [Google Scholar] [CrossRef]
- Li, P.; Lam, J.; Cheung, K.C. Multi-objective control for active vehicle suspension with wheelbase preview. J. Sound Vib. 2014, 333, 5269–5282. [Google Scholar] [CrossRef]
- Li, H.; Liu, H.; Gao, H.; Shi, P. Reliable fuzzy control for active suspension systems with actuator delay and Fault. IEEE Trans. Fuzzy Syst. 2011, 20, 342–357. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.; Yin, G.; Bian, C.; Chen, J.; Li, P.; Chen, N. Gain-scheduled vehicle handling stability control via integration of active front steering and suspension systems. ASME Trans. J. Dyn. Syst. Meas. Control. 2016, 138, 014501. [Google Scholar] [CrossRef]
- Morato, M.M.; Normey-Rico, J.E.; Sename, O. Sub-optimal recursively feasible Linear Parameter-Varying predictive algorithm for semi-active suspension control. IET Control Theory Appl. 2020, 14, 2764–2775. [Google Scholar] [CrossRef]
- Na, J.; Huang, Y.; Wu, X.; Su, S.; Li, G. Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay. IEEE Trans. Cybern. 2020, 50, 2639–2650. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Chen, H. Adaptive sliding mode control for uncertain active suspension systems with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst. 2020, in press. [Google Scholar] [CrossRef]
- Dinh, H.T.; Trinh, T.D.; Tran, V.N. Saturated RISE feedback control for uncertain nonlinear Macpherson active suspension system to improve ride comfort. ASME Trans. J. Dyn. Syst. Meas. Control. 2020, 143, 011004. [Google Scholar] [CrossRef]
- Jin, X.; Yang, J.; Li, Y.; Zhu, B.; Wang, J.; Yin, G. Online estimation of inertial parameter for lightweight electric vehicle using dual unscented Kalman filter approach. IET Intell. Transp. Syst. 2020, 14, 412–422. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Chen, N. Advanced Estimation Techniques for Vehicle System Dynamic State: A Survey. Sensors 2019, 19, 4289. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994; pp. 100–136. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| ms | 270 kg | mt | 40 kg |
| Ks | 22,000 N/m | mh | 30 kg |
| Kt | 220,000 N/m | Kh | 15,000 N/m |
| Cs | 200 Ns/m | dms | 0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, X.; Wang, J.; Sun, S.; Li, S.; Yang, J.; Yan, Z. Design of Constrained Robust Controller for Active Suspension of In-Wheel-Drive Electric Vehicles. Mathematics 2021, 9, 249. https://doi.org/10.3390/math9030249
Jin X, Wang J, Sun S, Li S, Yang J, Yan Z. Design of Constrained Robust Controller for Active Suspension of In-Wheel-Drive Electric Vehicles. Mathematics. 2021; 9(3):249. https://doi.org/10.3390/math9030249
Chicago/Turabian StyleJin, Xianjian, Jiadong Wang, Shaoze Sun, Shaohua Li, Junpeng Yang, and Zeyuan Yan. 2021. "Design of Constrained Robust Controller for Active Suspension of In-Wheel-Drive Electric Vehicles" Mathematics 9, no. 3: 249. https://doi.org/10.3390/math9030249
APA StyleJin, X., Wang, J., Sun, S., Li, S., Yang, J., & Yan, Z. (2021). Design of Constrained Robust Controller for Active Suspension of In-Wheel-Drive Electric Vehicles. Mathematics, 9(3), 249. https://doi.org/10.3390/math9030249