
Synchronization of Fractional-Order Chaotic Systems with Model Uncertainty and External Disturbance


Abstract
:1. Introduction
2. Preliminaries and Problem Formation
2.1. Preliminaries
2.2. Problem Formation
3. Main Results
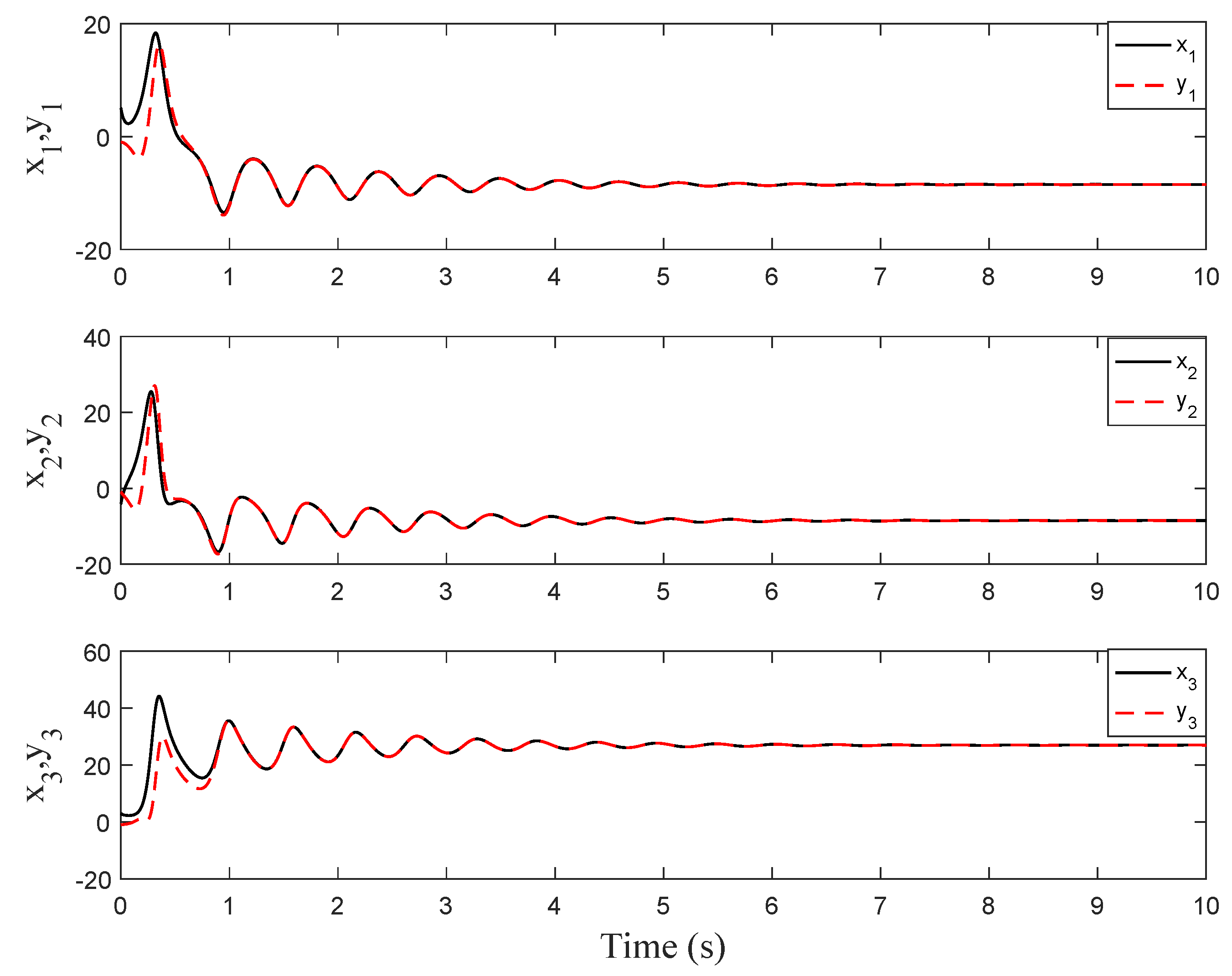
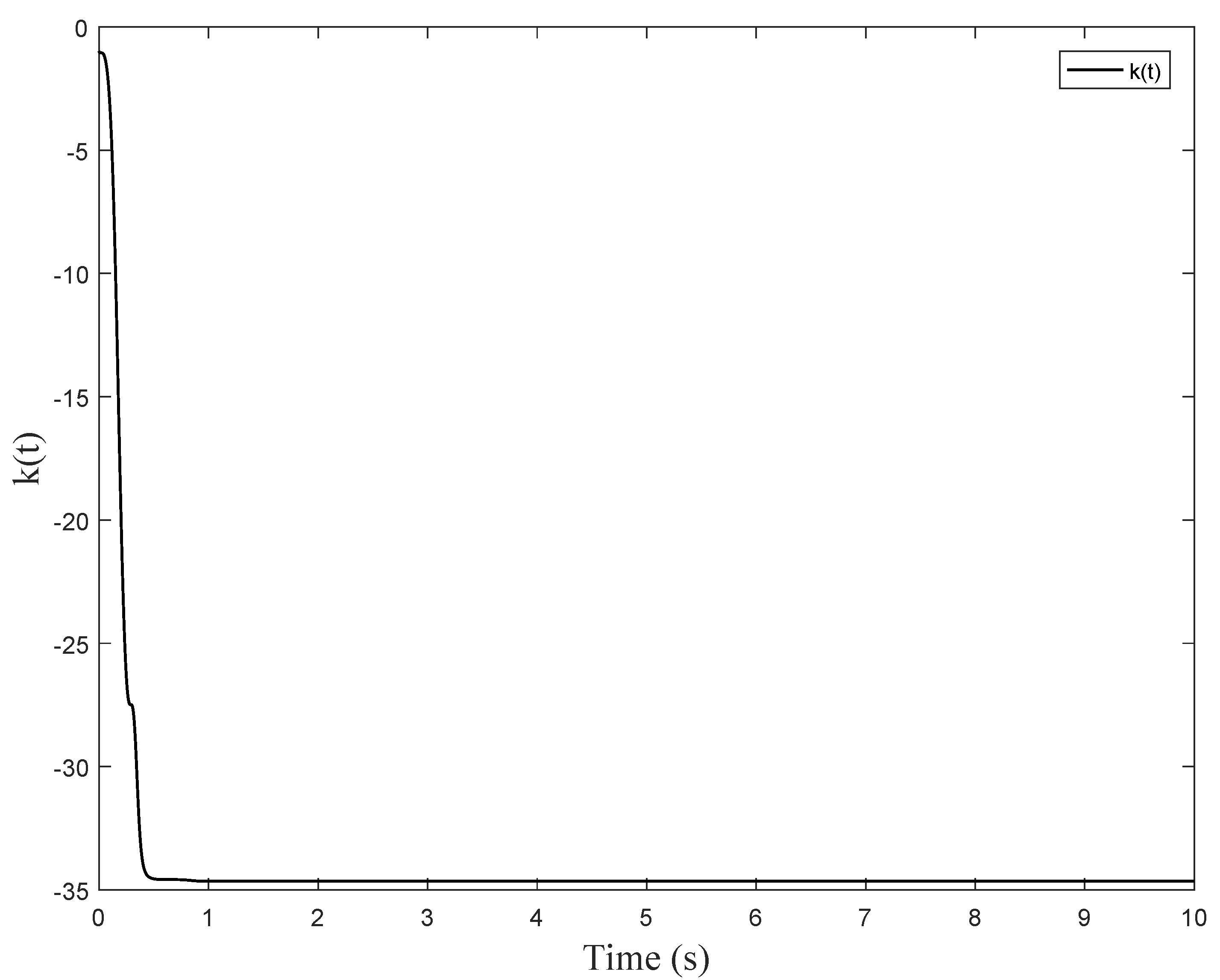
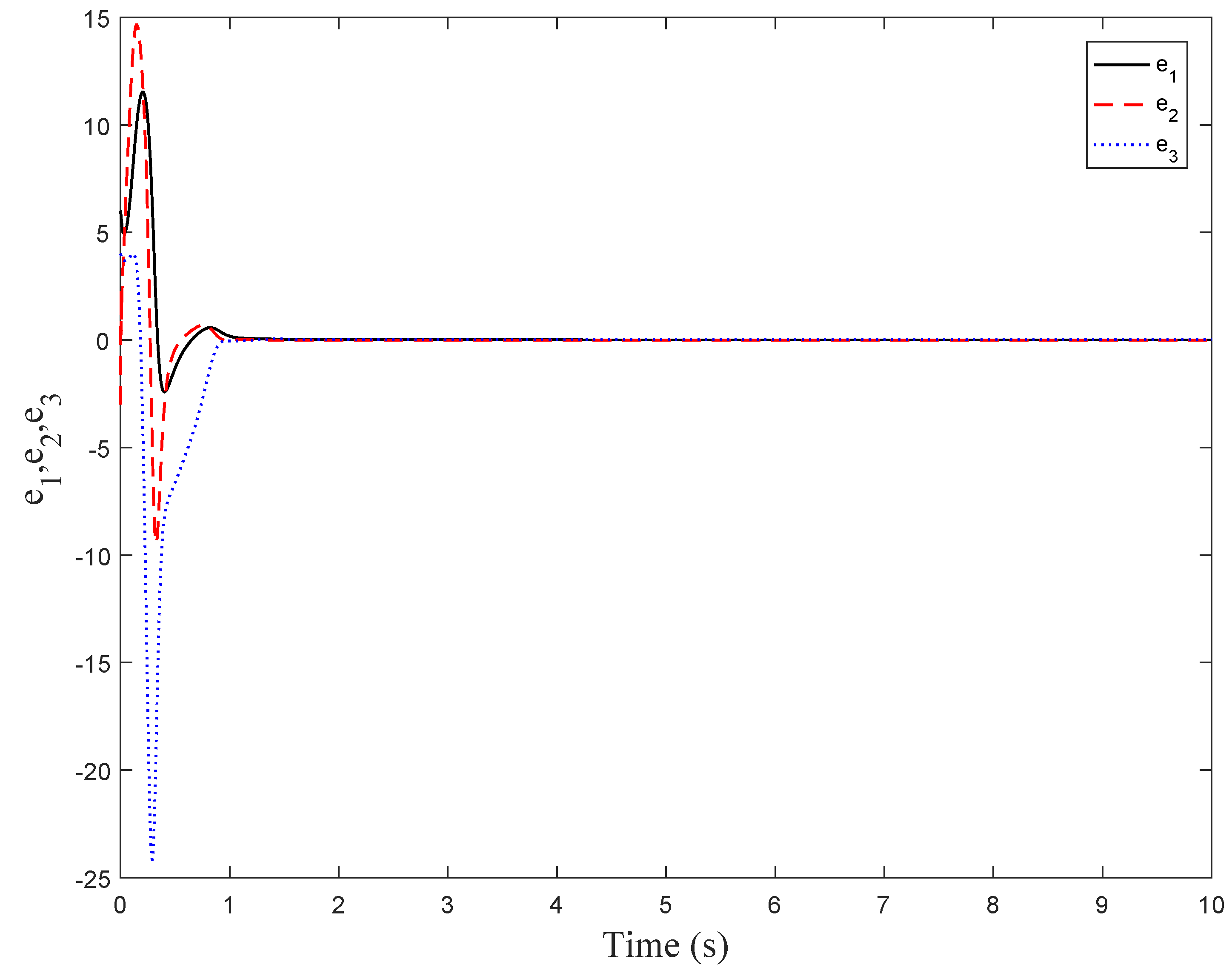
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, Y.; Chen, Y.; Pi, Y. Experimental study of fractional order proportional derivative controller synthesis for fractional order systems. Mechatronics 2011, 21, 204–214. [Google Scholar] [CrossRef]
- Liu, D.; Xu, W.; Xu, Y. Stochastic response of an axially moving viscoelastic beam with fractional order constitutive relation and random excitations. Acta Mech. Sin. 2013, 29, 443–451. [Google Scholar] [CrossRef]
- Gladkov, S. On mathematical description of crystallization as a deterministic chaos problem. Tech. Phys. 2008, 53, 952–955. [Google Scholar] [CrossRef]
- Sun, H.; Chen, W.; Li, C.; Chen, Y. Finite difference schemes for variable-order time fractional diffusion equation. Int. J. Bifurc. Chaos 2012, 22, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Gladkov, S.; Bogdanova, S. The heat-transfer theory for quasi-n-dimensional system. Physica B 2010, 405, 1973–1975. [Google Scholar] [CrossRef]
- Sharma, D.; Narayan, S.; Kaur, S. Finite time fractional-order sliding mode-based tracking for a class of fractional-order nonholonomic chained system. J. Comput. Nonlinear Dyn. 2018, 13, 1–23. [Google Scholar]
- Sharma, D.; Kaur, S.; Narayan, S. Fractional order uncertainty estimator based hierarchical sliding mode design for a class of fractional order non-holonomic chained system. ISA Trans. 2018, 77, 58–70. [Google Scholar]
- Xu, Y.; Liu, Q.; Guo, G.; Xu, C.; Liu, D. Dynamical responses of airfoil models with harmonic excitation under uncertain disturbance. Nonlinear Dyn. 2017, 89, 1579–1590. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Wang, S.; Yu, J. Dynamic analysis of a fractional-order Lorenz chaotic system. Chaos Solitons Fractals 2009, 42, 1181–1189. [Google Scholar] [CrossRef]
- Lu, J.; Chen, G. A note on the fractional-order Chen system. Chaos Solitons Fractals 2006, 27, 685–688. [Google Scholar] [CrossRef]
- Wang, B.; Li, L.; Wang, Y. An efficient nonstandard finite difference scheme for chaotic fractional-order Chen system. IEEE Access 2020, 8, 98410–98421. [Google Scholar] [CrossRef]
- Li, C.; Chen, G. Chaos and hyperchaos in the fractional-order Rössler equations. Phys. A Stat. Mech. Appl. 2004, 341, 55–61. [Google Scholar] [CrossRef]
- Lu, J. Chaotic dynamics of the fractional-order Lü system and its synchronization. Phys. Lett. A 2006, 354, 305–311. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic system. Phys. Rev. Lett. 1990, 64, 821–825. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Y.; Li, G.; Xiang, W.; Xu, G. Adaptive fuzzy synchronization of fractional-order chaotic (hyperchaotic) systems with input saturation and unknown parameters. Complexity 2017, 2017, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Yan, B.; He, S.; Wang, S. Multistability in a fractional-order centrifugal flywheel governor system and its adaptive control. Complexity 2020, 2020, 1–11. [Google Scholar]
- Yin, C.; Dadras, S.; Zhong, S.; Chen, Y. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Zhang, R.; Yang, S. Adaptive synchronization of fractional-order chaotic systems via a single driving variable. Nonlinear Dyn. 2011, 66, 831–837. [Google Scholar] [CrossRef]
- Park, J.H. Adaptive synchronization of Rössler system with uncertain parameters. Chaos Solitons Fractals 2005, 25, 333–338. [Google Scholar] [CrossRef]
- Karimov, A.; Tutueva, A.; Karimov, T.; Druzhina, O.; Butusov, D. Adaptive generalized synchronization between circuit and computer implementations of the Rössler system. Appl. Sci. 2021, 11, 81. [Google Scholar]
- Kuntanapreeda, S. Adaptive control of fractional-order unified chaotic systems using a passivity-based control approach. Nonlinear Dyn. 2016, 84, 2505–2515. [Google Scholar] [CrossRef]
- Bhalekar, S.; Daftardar-Gejji, V. Synchronization of different fractional order chaotic systems using active control. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3536–3546. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, Y.; Chen, Y.; Chen, X.; Xi, L. Fuzzy neural network-based chaos synchronization for a class of fractional-order chaotic systems: An adaptive sliding mode control approach. Nonlinear Dyn. 2020, 100, 1275–1287. [Google Scholar] [CrossRef]
- Aghababa, M.P. Robust stabilization and synchronization of a class of fractional-order chaotic systems via a novel fractional sliding mode controller. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2670–2681. [Google Scholar] [CrossRef]
- Pan, L.; Zhou, W.; Zhou, L.; Sun, K. Chaos synchronization between two different fractional-order hyperchaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2628–2640. [Google Scholar] [CrossRef]
- Jiang, C.; Zada, A.; Şenel, M.T.; Li, T. Synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection based on antisymmetric structure. Adv. Differ. Equ. 2019, 2019, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.; Zhang, F.; Li, T. Synchronization and anti-synchronization of N-coupled fractional-order complex systems with ring connection. Math. Methods Appl. Sci. 2018, 41, 2625–2638. [Google Scholar] [CrossRef]
- Yang, L.; Jiang, J. Complex dynamical behavior and modified projective synchronization in fractional-order hyper-chaotic complex Lü system. Chaos Solitons Fractals 2015, 78, 267–276. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, J.; Wu, R.; Alsaadi, F.E.; Alsaedi, A. Lag projective synchronization of fractional-order delayed chaotic systems. J. Frankl. Inst. 2019, 356, 1522–1534. [Google Scholar] [CrossRef]
- Li, C.; Deng, W. Chaos synchronization of fractional-order differential systems. Int. J. Mod. Phys. B 2006, 20, 791–803. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, H. Synchronization of fractional-order chaotic systems with Gaussian fluctuation by sliding mode control. Abstr. Appl. Anal. 2013, 2013, 1–7. [Google Scholar]
- Wang, Q.; Qi, D. Synchronization for fractional order chaotic systems with uncertain parameters. Int. J. Control. Autom. Syst. 2016, 14, 211–216. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, G. Synchronization between fractional-order and integer-order hyperchaotic systems via sliding mode controller. J. Appl. Math. 2013, 2013, 1–5. [Google Scholar] [CrossRef]
- Hou, T.; Liu, Y.; Deng, F. Finite horizon H2/H∞ control for SDEs with infinite Markovian jumps. Nonlinear Anal. Hybrid Syst. 2019, 34, 108–120. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.; Chen, J. Robust control for a class of nonaffine nonlinear systems based on the uncertainty and disturbance estimator. IEEE Trans. Ind. Electron. 2015, 62, 5881–5888. [Google Scholar] [CrossRef]
- Yi, X.; Guo, R.; Qi, Y. Stabilization of chaotic systems with both uncertainty and disturbance by the UDE-Based Control Method. IEEE Access 2020, 8, 62471–62477. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Guo, R. Consensus control for networked manipulators with switched parameters and topologies. IEEE Access 2021, 9, 9209–9217. [Google Scholar] [CrossRef]
- Peng, R.; Jiang, C.; Guo, R. Stabilization of a class of fractional order systems with both uncertainty and disturbance. IEEE Access 2021, 9, 42697–42706. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F. Fractional calculus: Integral and differential equations of fractional order. Mathematics 2008, 49, 277–290. [Google Scholar]
- Guo, R. A simple adaptive controller for chaos and hyperchaos synchronization. Phys. Lett. A 2008, 372, 5593–5597. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Jiang, H.; Cao, J. Global synchronization of fractional-order quaternion-valued neural networks with leakage and discrete delays. Neurocomputing 2020, 385, 211–219. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, R.; Zhang, Y.; Jiang, C. Synchronization of Fractional-Order Chaotic Systems with Model Uncertainty and External Disturbance. Mathematics 2021, 9, 877. https://doi.org/10.3390/math9080877
Guo R, Zhang Y, Jiang C. Synchronization of Fractional-Order Chaotic Systems with Model Uncertainty and External Disturbance. Mathematics. 2021; 9(8):877. https://doi.org/10.3390/math9080877
Chicago/Turabian StyleGuo, Rongwei, Yaru Zhang, and Cuimei Jiang. 2021. "Synchronization of Fractional-Order Chaotic Systems with Model Uncertainty and External Disturbance" Mathematics 9, no. 8: 877. https://doi.org/10.3390/math9080877
APA StyleGuo, R., Zhang, Y., & Jiang, C. (2021). Synchronization of Fractional-Order Chaotic Systems with Model Uncertainty and External Disturbance. Mathematics, 9(8), 877. https://doi.org/10.3390/math9080877