
A Study Using Optimized LSSVR for Real-Time Fault Detection of Liquid Rocket Engine


Abstract
:1. Introduction
2. Problem Background
2.1. Description of Liquid Rocket Engine
- Starting Stage: LRE receives the boot instruction and starts to work until various operating indicators of the system enter the main working condition. The starting process of LRE is a nonlinear time-varying random process. It is necessary to complete the opening and closing of valve and the sudden rise of turbine and pump speed in a very short time. Various physical parameters vary widely and at a large rate.
- Steady Stage: At this stage, the relevant parameters of LRE are in a preset state, and the relevant measurement data are generally in a stable state. If the engine working condition is adjusted, the relevant sensor measurement data will fluctuate.
- Shutdown Stage: LRE receives shutdown instructions, various valves are closed, and relevant propellant connections are disconnected until the engine thrust is reduced to zero, completing engine shutdown.
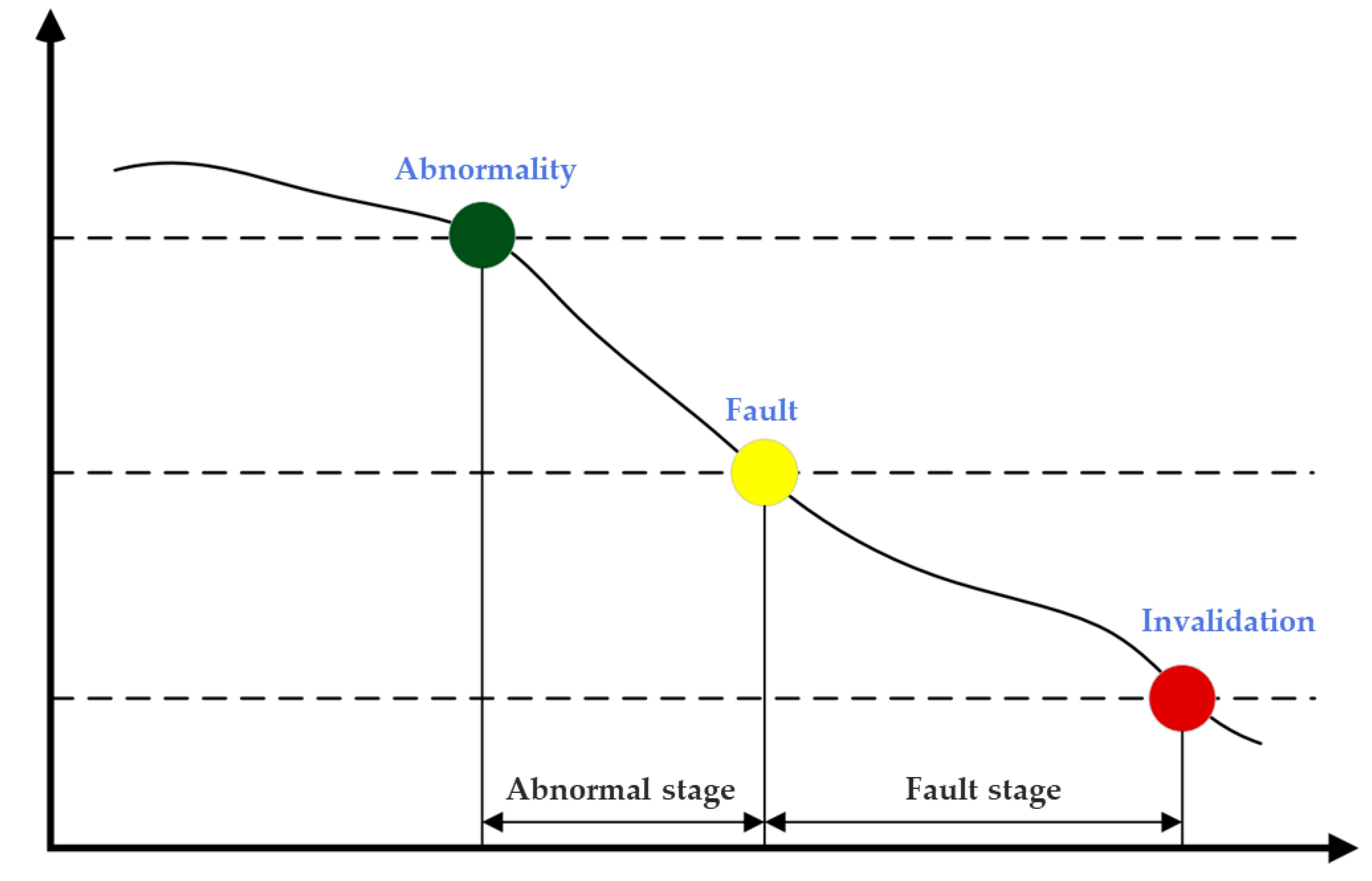
2.2. LRE Fault Process
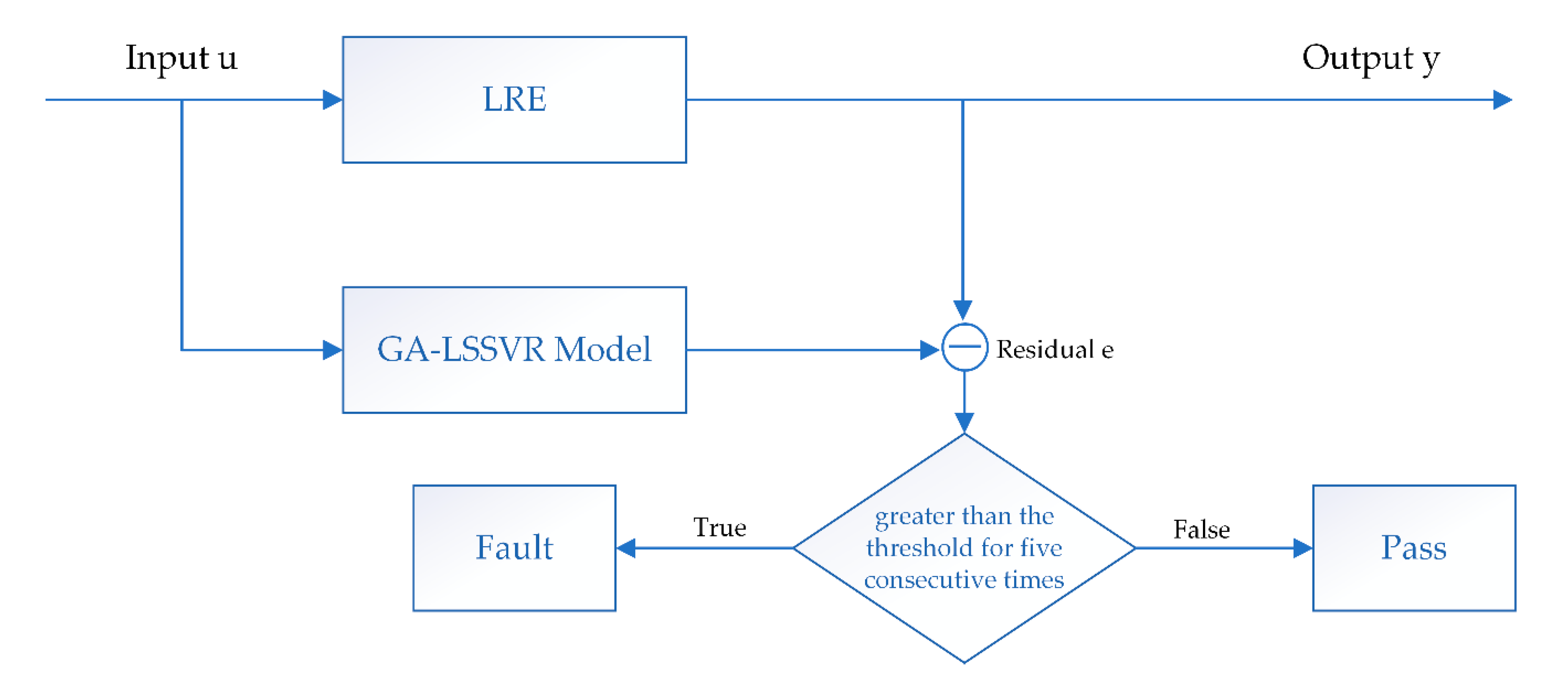
2.3. Fault Detection Logic
2.4. Set the Threshold for Fault Detection
2.5. Data Preparation
3. Introduction to SVR and LSSVR
3.1. Introduction to SVR
- Linear Kernel Function
- Polynomial Kernel Function
- Gaussian Kernel Function (RBF Kernel Function)
3.2. Introduction to LSSVR
4. Determine Parameters of LSSVR
4.1. Grid Search
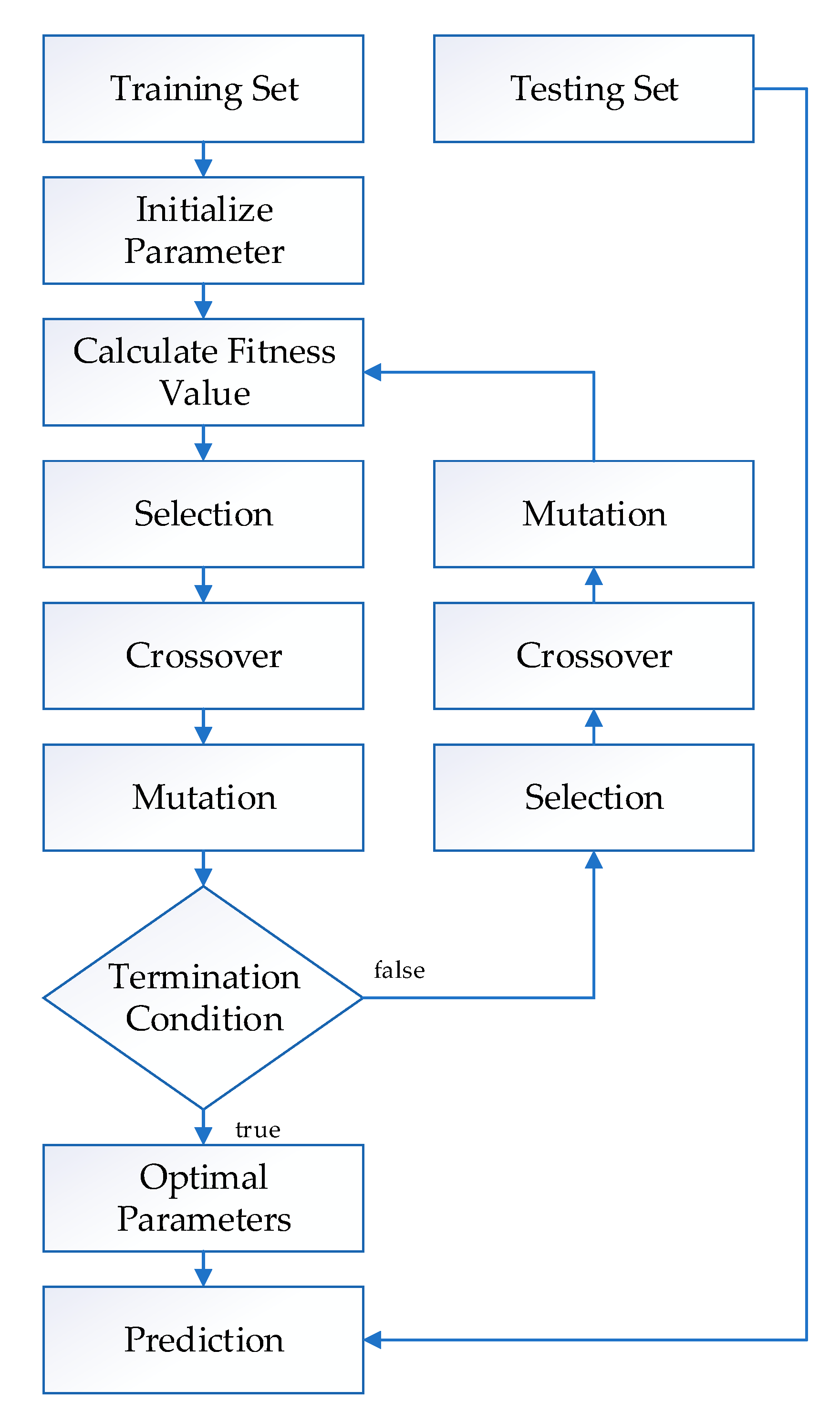
4.2. Optimization of LSSVR Using Genetic Algorithm
- Step 1: The parameters that need to be optimized by LSSVR are binary coded to form chromosomes and initialize the population.
- Step 2: The chromosome in the population was decoded to obtain the parameter value of LSSVR, which was used to train the LSSVR model, calculate the fitness value of each chromosome, and record the best fitness obtained in the contemporary population and the corresponding parameters.
- Step 3: Selection, crossover, and mutation were carried out on the population.
- Step 4: Decode the newly obtained population, calculate the fitness value, and judge whether the termination condition is met. If not, continue to perform Step 3.
- Step 5: Output the optimal LSSVR parameters.
5. Computations and Analysis
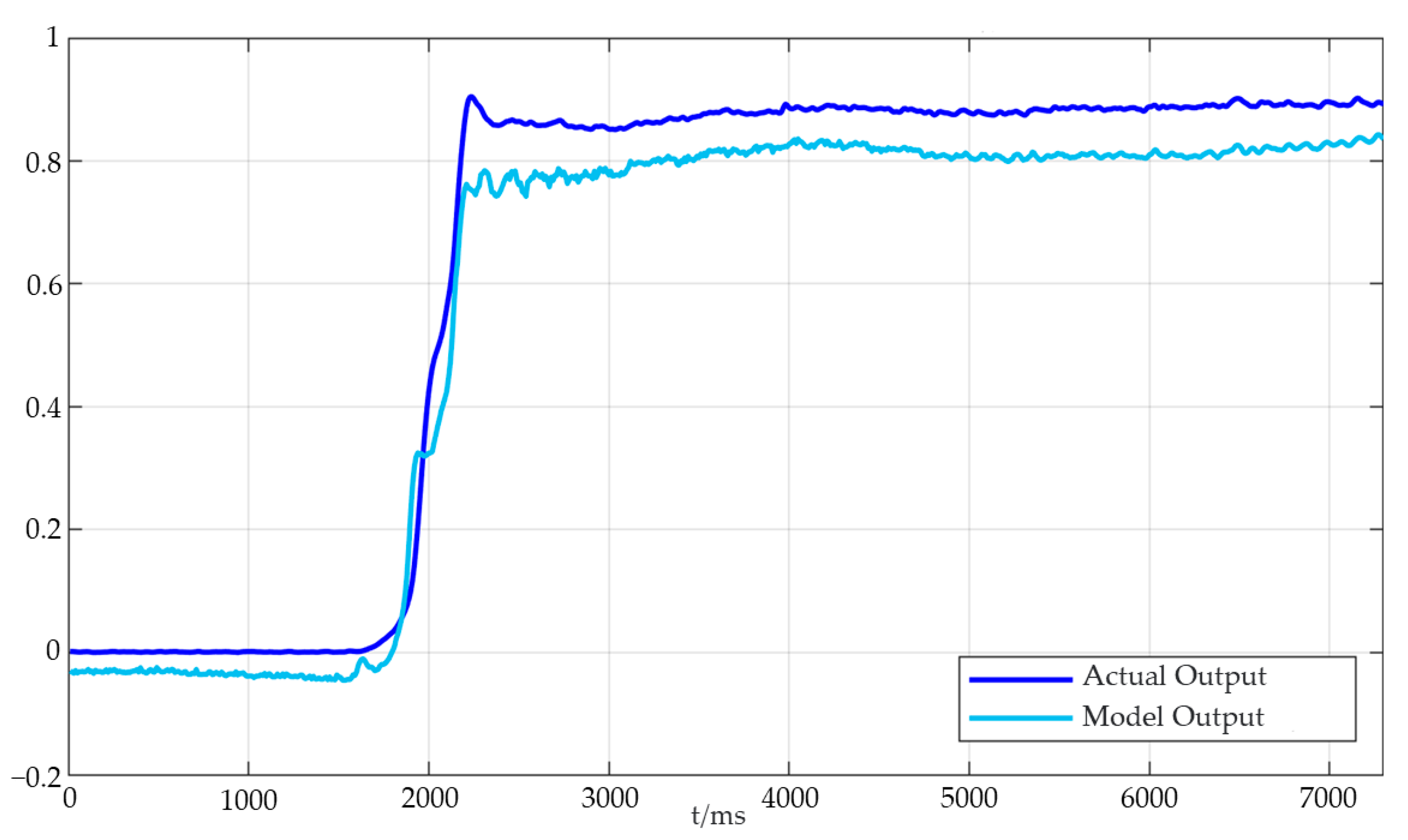
5.1. Real-Time Fault Detection
5.2. Validation of Fault Detection Effect
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duyar, A.; Eldem, V. Fault detection and diagnosis in propulsion systems; a real time identification approach. In Proceedings of the IFAC/IMACS Symposium, Baden-Baden, Germany, 10–13 September 1991; Elesevier: Amsterdam, The Netherlands, 1992; pp. 473–478. [Google Scholar]
- Tao, H.; Minchao, H.; Xiaoping, H.; Qi, Z. Design Analysis of Fault Detection and Diagnosis Algorithms for Rocket Engine. J. Nanjing Univ. Aeronaut. Astronaut. 2019, 51, 50–55. [Google Scholar]
- Lv, H.; Chen, J.; Wang, J.; Yuan, J.; Liu, Z. A Supervised Framework for Recognition of Liquid Rocket Engine Health State Under Steady-State Process Without Fault Samples. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Jianjun, W.; Yuqiang, C.; Xing, C. Research Status of the Health Monitoring Technology for Liquid Rocket Engines. Aerosp. Shanghai 2020, 37, 1–10. [Google Scholar]
- Tsutsumi, S.; Hirabayashi, M.; Sato, D.; Kawatsu, K.; Sato, M.; Kimura, T.; Hashimoto, T.; Abe, M. Data-driven fault detection in a reusable rocket engine using bivariate time-series analysis. Acta Astronaut. 2020, 179, 685–694. [Google Scholar] [CrossRef]
- Naderi, M.; Karimi, H.; Guozhu, L. Modeling the effect of reusability on the performance of an existing LPRE. Acta Astronaut. 2020, 181, 201–216. [Google Scholar] [CrossRef]
- Panossian, H.; Ewing, W. Real time failure detection algorithm for the Space Shuttle main engine. IEEE Control Syst. 1997, 17, 16–23. [Google Scholar] [CrossRef]
- Nemeth, E. Health Management for Rocket Engines System; National Technical Information Service: Washington, DC, USA; National Aeronautics and Space Administration: Springfield, VA, USA, 1990.
- Bickford, R.; Malloy, D. Development of a Real-Time Turbine Engine Diagnostic System. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, IN, USA, 7–10 July 2002. [Google Scholar]
- Fiorucci, T.; II, D.L.; Reynolds, T. Advanced engine health management applications of the SSME Real-Time Vibration Moni-toring System. In Proceedings of the 36th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Las Vegas, NV, USA, 24–28 July 2000. [Google Scholar]
- Hawman, M. Health monitoring system for the SSME—Program overview. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. [Google Scholar]
- Feng, Y.; Liu, Z.; Chen, J.; Lv, H.; Wang, J.; Yuan, J. Make the Rocket Intelligent at IoT Edge: Stepwise GAN for Anomaly Detection of LRE With Multisource Fusion. IEEE Internet Things J. 2021, 9, 3135–3149. [Google Scholar] [CrossRef]
- Wu, J. Liquid-propellant rocket engines health-monitoring—A survey. Acta Astronaut. 2005, 56, 347–356. [Google Scholar] [CrossRef]
- Figueroa, F.; Schmalzel, J. Rocket Testing and Integrated System Health Management. In Condition Monitoring and Control for Intelligent Manufacturing; Wang, L., Gao, R.X., Eds.; Springer: London, UK, 2006; pp. 373–391. [Google Scholar]
- Zhong, Z.; Xu, L.; Xu, J. ISHM-Oriented Time Decision-Making for Condition-Based Maintenance of Multistate Systems. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 15–29. [Google Scholar] [CrossRef]
- Ali, M.; Gupta, U. An expert system for fault diagnosis in a Space Shuttle main engine. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. [Google Scholar]
- Gupta, U.K.; Ali, M. LEADER-an integrated engine behavior and design analyses based real-time fault diagnostic expert system for space shuttle main engine (SSME). In Proceedings of the 2nd International Conference on Industrial and Engineering Applications of Artificial Intelligence and Expert Systems, Tullahoma, TN, USA, 6–9 June 1989; ACM: New York, NY, USA, 1989; Volume 1, pp. 135–145. [Google Scholar]
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef]
- Aiswarya, N.; Priyadharsini, S.S.; Moni, K.S. An efficient approach for the diagnosis of faults in turbo pump of liquid rocket engine by employing FFT and time-domain features. Aust. J. Mech. Eng. 2016, 16, 1–10. [Google Scholar] [CrossRef]
- Hong, T.; Yang, S. Adaptive Algorithm Based on Wavelet and SVM for Turbopump Fault Detection. Appl. Mech. Mater. 2014, 644–650, 994–1002. [Google Scholar] [CrossRef]
- Hong, T.; Li, H. Turbopump fault detection algorithm based on protruding frequency components RMS and SVM. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 1311–1316. [Google Scholar]
- Yuan, S.-F.; Chu, F.-L. Support vector machines-based fault diagnosis for turbo-pump rotor. Mech. Syst. Signal Process. 2006, 20, 939–952. [Google Scholar] [CrossRef]
- Heng, H.; Zhang, J.; Xin, C. Research on aircraft engine fault detection based on support vector machines. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2012; pp. 496–499. [Google Scholar]
- Hu, L.; Hu, N.; Zhang, X.; Gu, F.; Gao, M. Novelty detection methods for online health monitoring and post data analysis of turbopumps. J. Mech. Sci. Technol. 2013, 27, 1933–1942. [Google Scholar] [CrossRef]
- Zhu, X.; Cheng, Y.; Wu, J.; Hu, R.; Cui, X. Steady-State Process Fault Detection for Liquid Rocket Engines Based on Convolu-tional Auto-Encoder and One-Class Support Vector Machine. IEEE Access 2020, 8, 3144–3158. [Google Scholar] [CrossRef]
- Strauss, A.M. Failure Characteristics Analysis and Fault Diagnosis for Liquid Rocket Engines; American Library Association dba CHOICE: Middletown, NJ, USA, 2016; Volume 54, p. 556. [Google Scholar]
- Feng, Y.; Liu, Z.; Chen, J.; Lv, H.; Wang, J.; Zhang, X. Unsupervised Multimodal Anomaly Detection with Missing Sources for Liquid Rocket Engine. IEEE Trans. Neural Networks Learn. Syst. 2022, 1–15. [Google Scholar] [CrossRef]
- Nie, Y.; Cheng, Y.; Wu, J. Liquid-propellant rocket engine online health condition monitoring base on multi-algorithm parallel integrated decision-making. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 231, 1621–1633. [Google Scholar] [CrossRef]
- Yu, H.; Wang, T. A Method for Real-Time Fault Detection of Liquid Rocket Engine Based on Adaptive Genetic Algorithm Optimizing Back Propagation Neural Network. Sensors 2021, 21, 5026. [Google Scholar] [CrossRef]
- Yu, H.; Wang, T.; Tang, Y. A Method Using Quantum Genetic Algorithm optimized BP Neural Network of Real-time Fault Detection for the Liquid Rocket Engine. In Proceedings of the 2021 Global Reliability and Prognostics and Health Management (PHM-Nanjing), Nanjing, China, 15–17 October 2021; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Al-Zoubi, N.; Kachrimanis, K.; Younis, K.; Malamataris, S. Optimization of extended-release hydrophilic matrix tablets by support vector regression. Drug Dev. Ind. Pharm. 2010, 37, 80–87. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Number | Parameters (Unit) |
|---|---|
| S1 | Post hydrogen pump temperature (K) |
| S2 | Post oxygen pump temperature (K) |
| S3 | Gas generator temperature (K) |
| S4 | Generator pressure before hydrogen injection (MPa) |
| S5 | Pressure before oxygen injection of generator (MPa) |
| S6 | Inlet pressure of hydrogen pump (MPa) |
| S7 | Oxygen pump outlet pressure (MPa) |
| S8 | Oxygen pump inlet pressure (MPa) |
| S9 | Outlet pressure of hydrogen pump (MPa) |
| S10 | Combustion chamber pressure (MPa) |
| S11 | Gas generator pressure (MPa) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, P.; Yu, H.; Wang, T. A Study Using Optimized LSSVR for Real-Time Fault Detection of Liquid Rocket Engine. Processes 2022, 10, 1643. https://doi.org/10.3390/pr10081643
Huang P, Yu H, Wang T. A Study Using Optimized LSSVR for Real-Time Fault Detection of Liquid Rocket Engine. Processes. 2022; 10(8):1643. https://doi.org/10.3390/pr10081643
Chicago/Turabian StyleHuang, Peihao, Huahuang Yu, and Tao Wang. 2022. "A Study Using Optimized LSSVR for Real-Time Fault Detection of Liquid Rocket Engine" Processes 10, no. 8: 1643. https://doi.org/10.3390/pr10081643
APA StyleHuang, P., Yu, H., & Wang, T. (2022). A Study Using Optimized LSSVR for Real-Time Fault Detection of Liquid Rocket Engine. Processes, 10(8), 1643. https://doi.org/10.3390/pr10081643