
Parameter Optimization and Testing of a Conveying and Soil-Removing Device for Tiger Nut (Cyperus esculentus) Mechanical Harvesting

Abstract
:1. Introduction
2. Materials and Methods
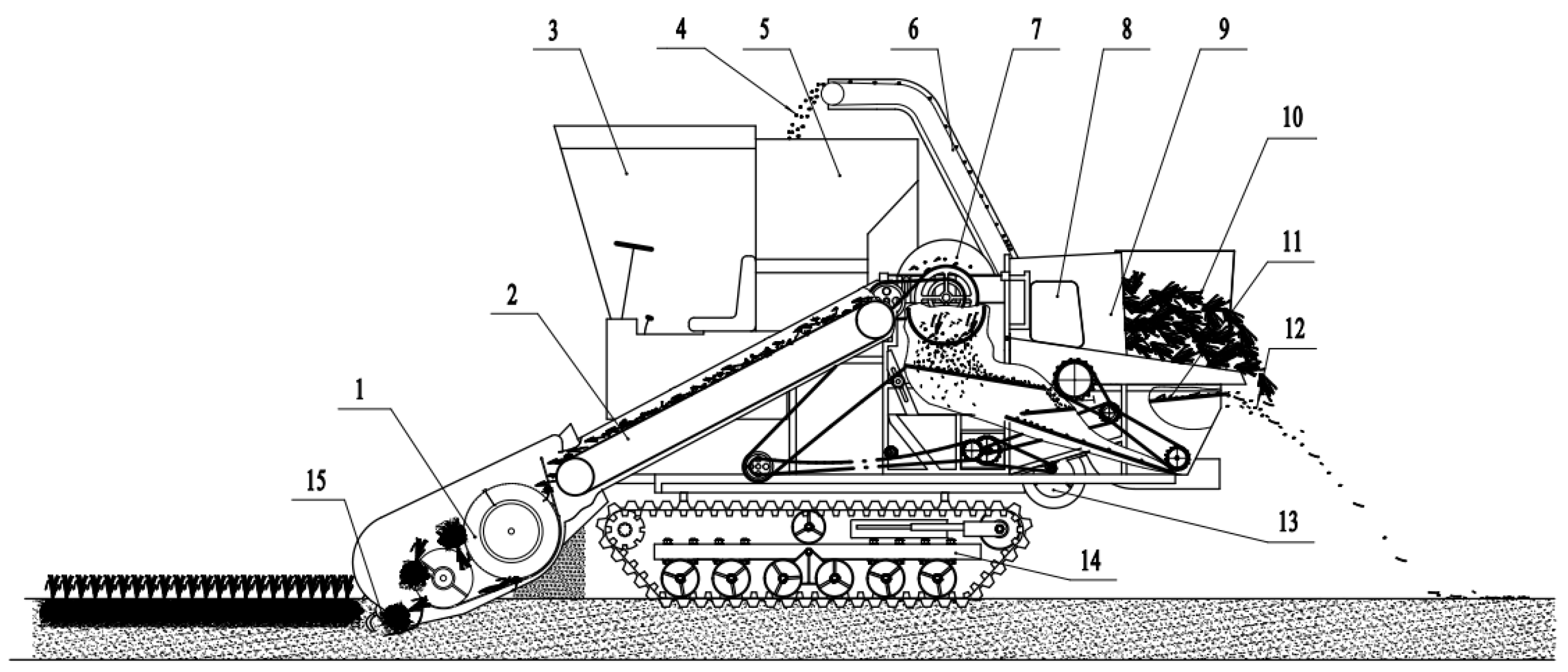
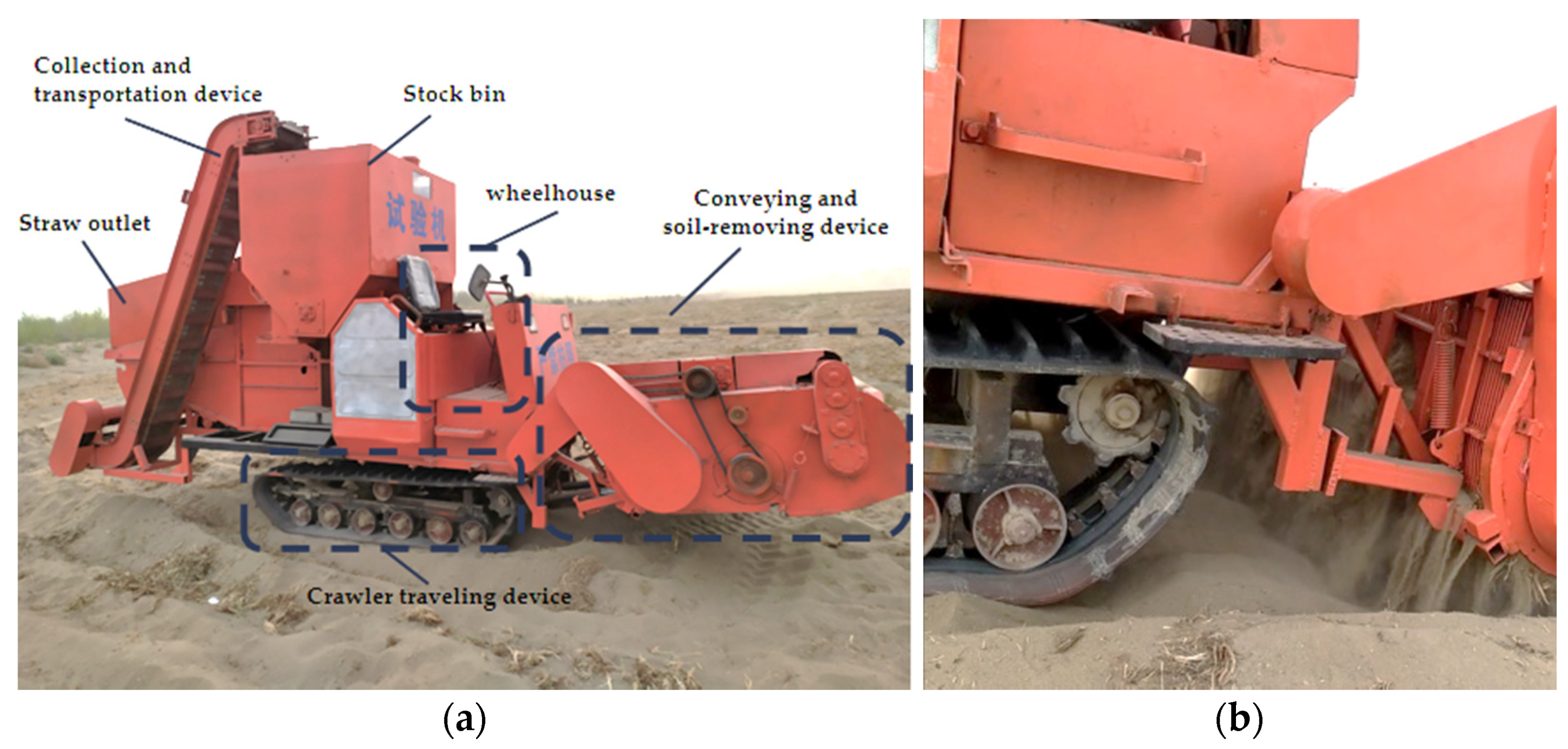
2.1. Structure and Working Principle of Tiger Nut Harvester
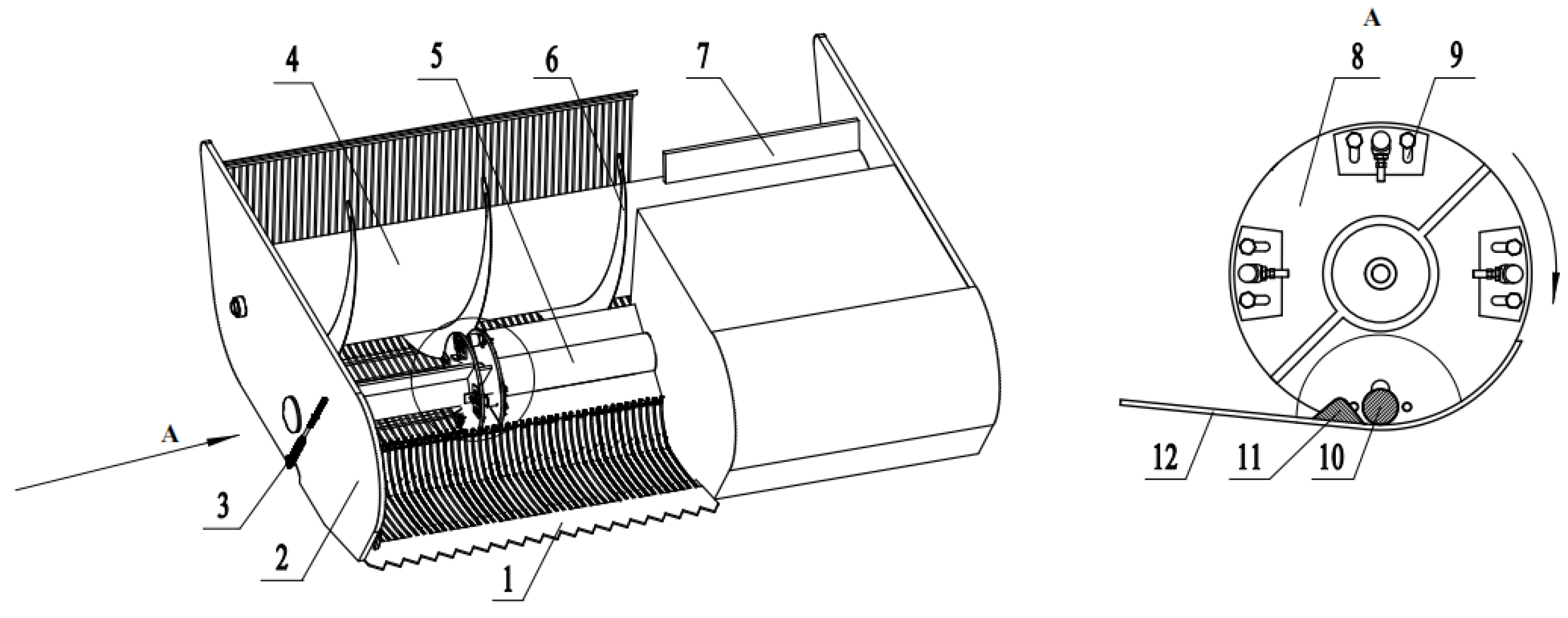
2.2. Structure and Working Principle of Conveying and Soil-Removing Device
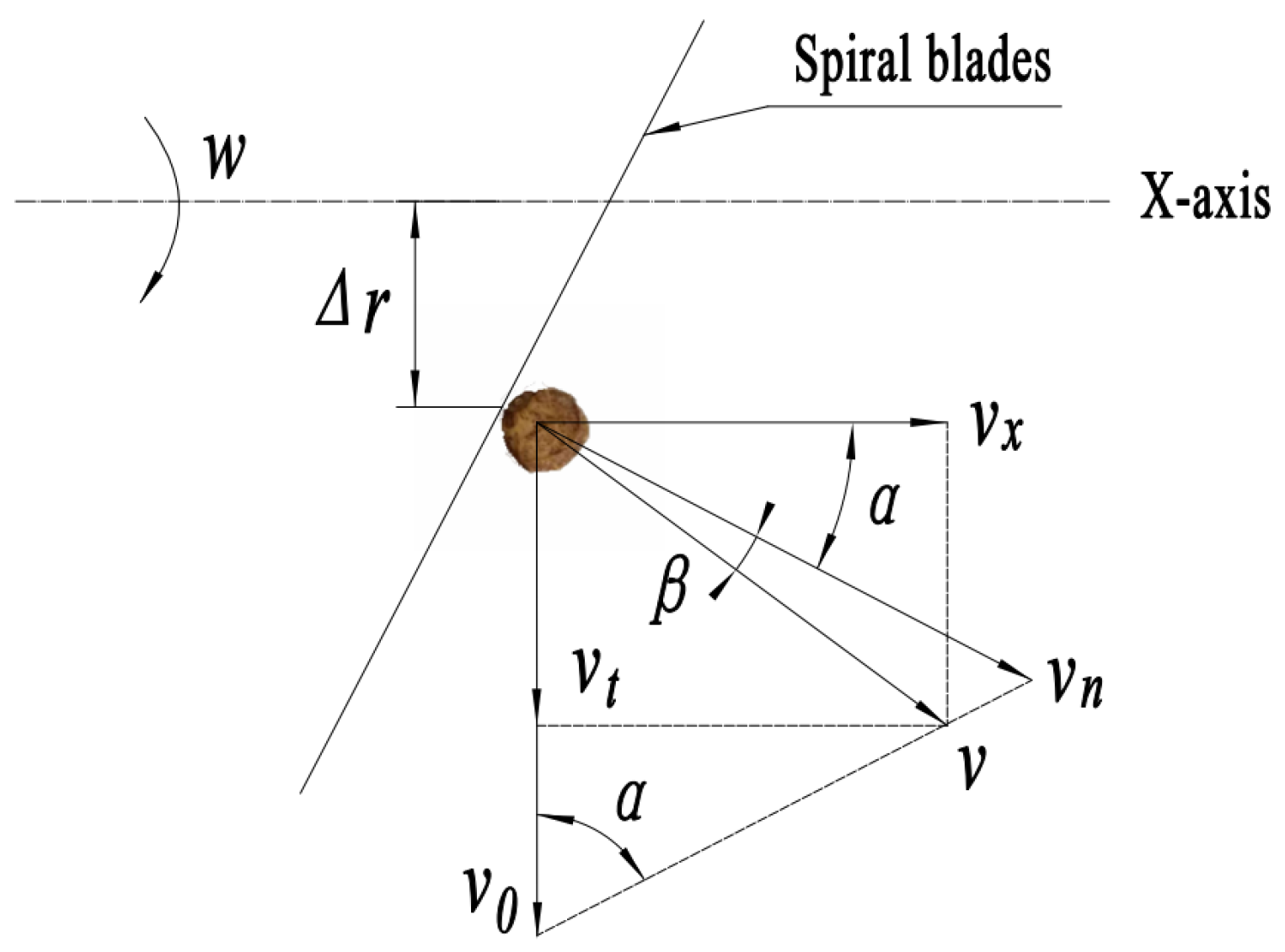
2.3. Analysis of Conveyance Velocity of Tiger Nut
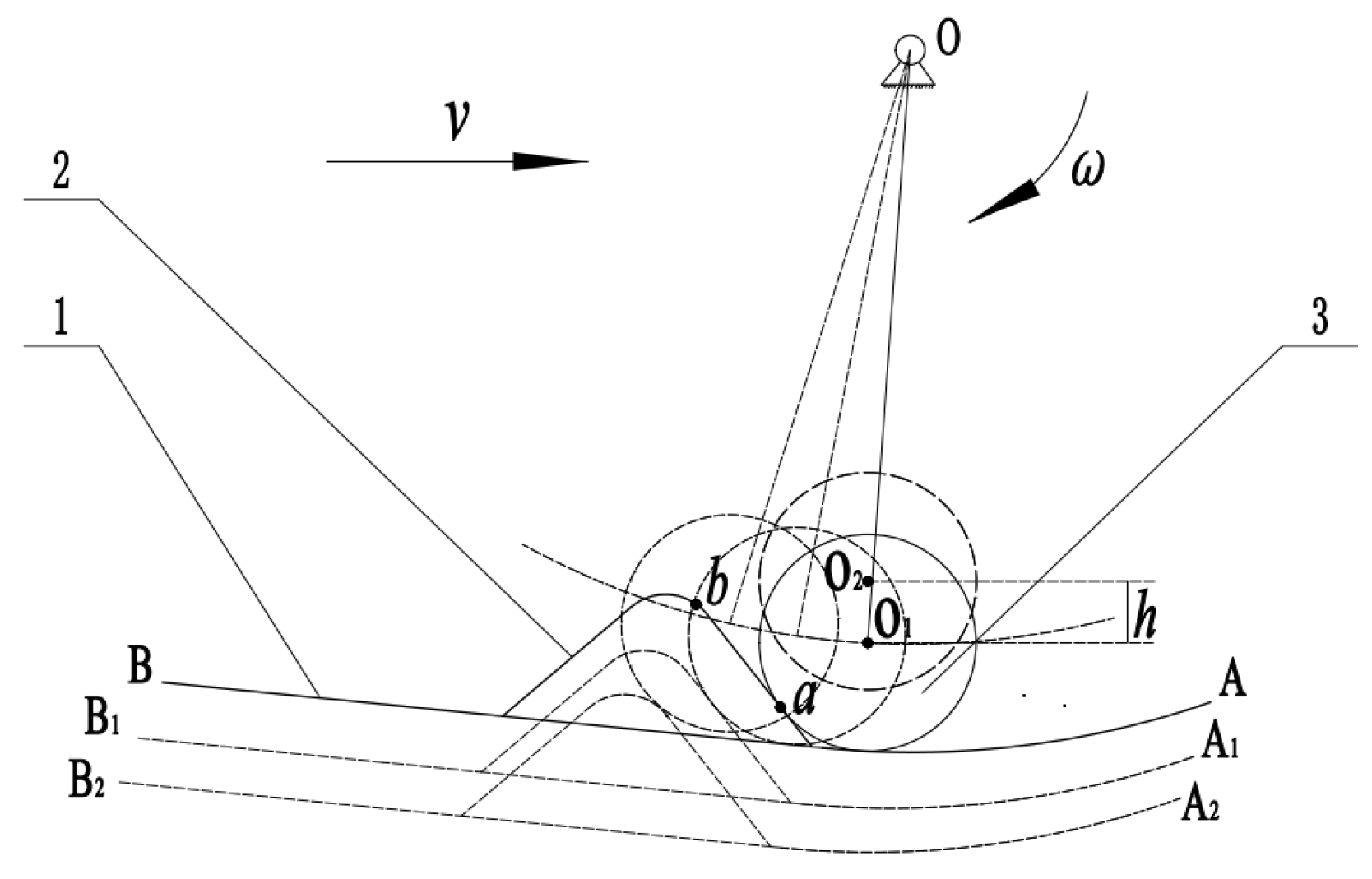
2.4. Analysis of Bar Screen Motion Process
2.5. Simulation and Analysis of Conveying and Soil-Removing Process
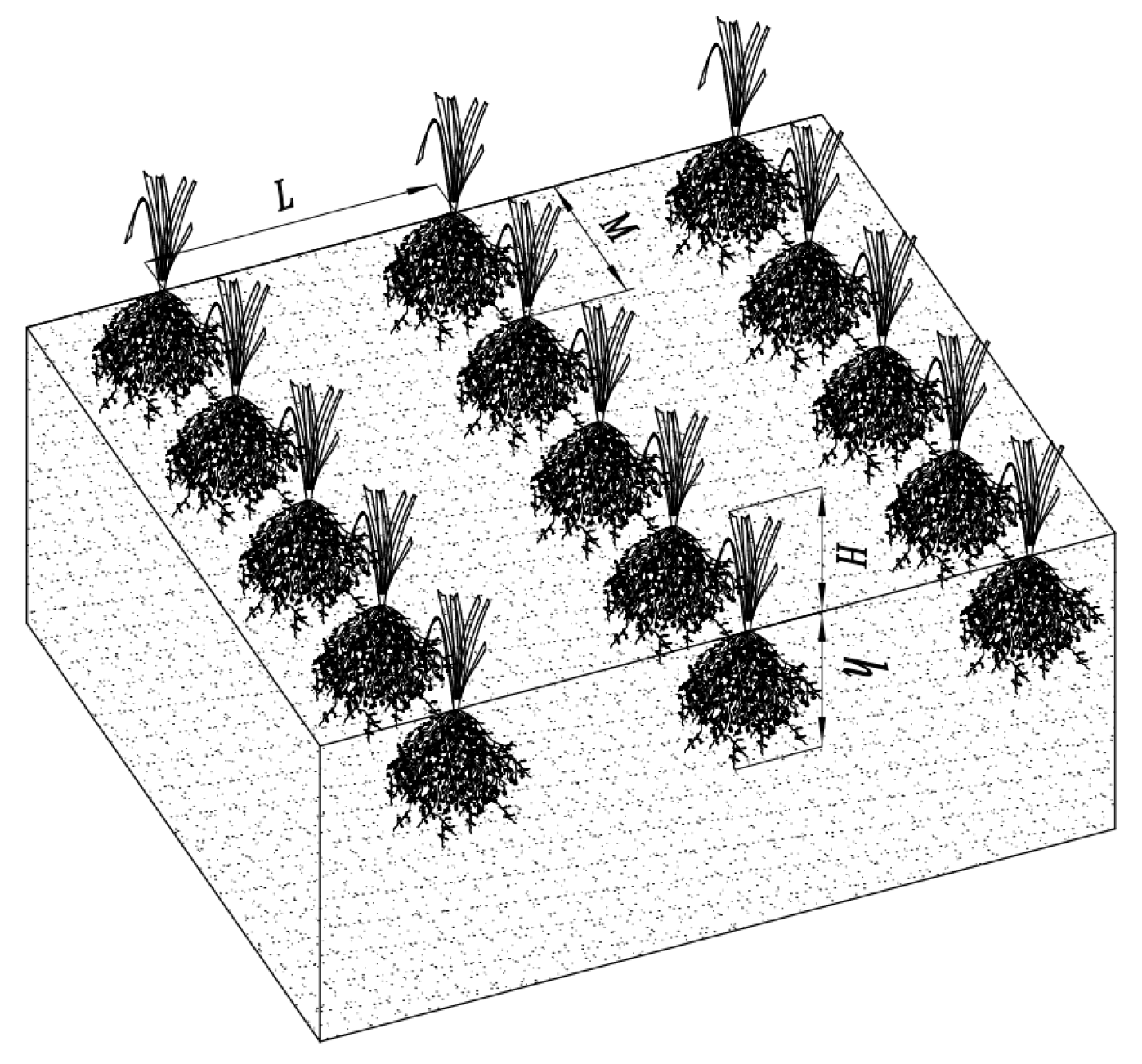
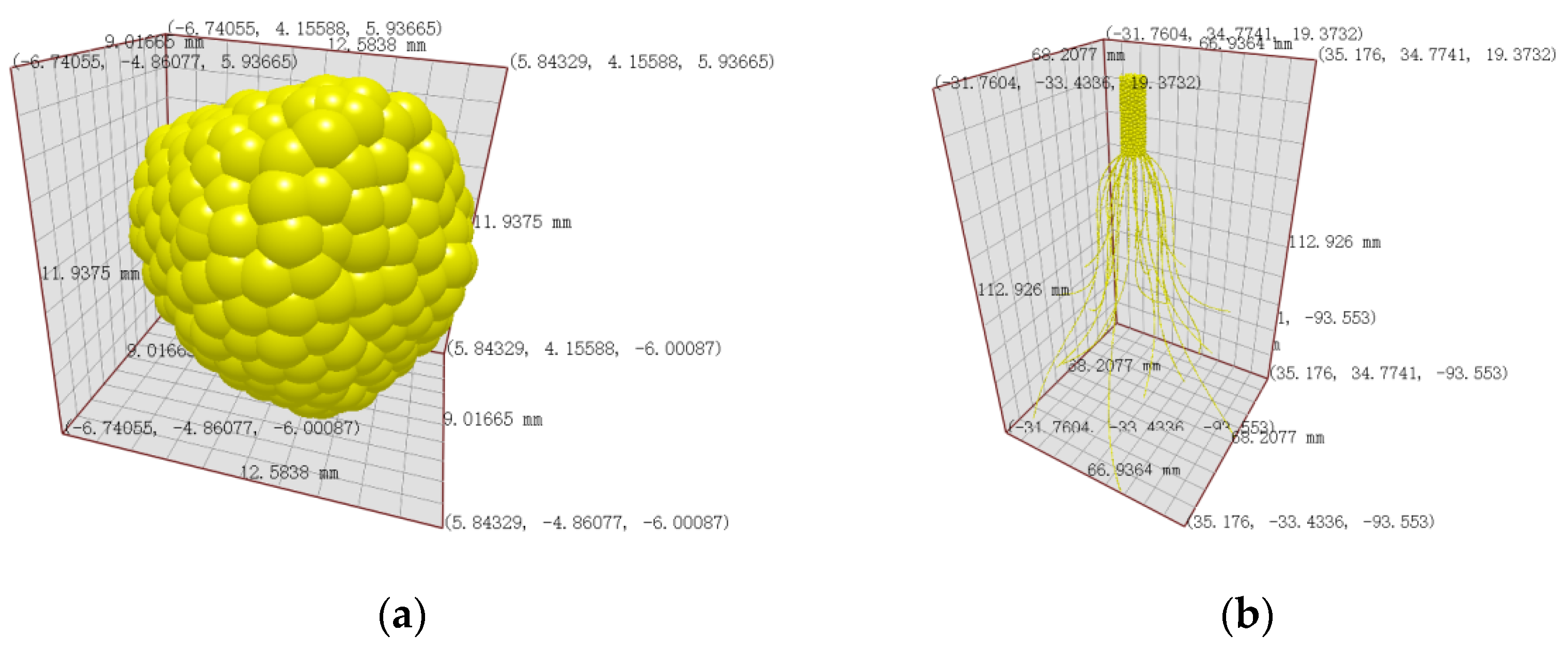
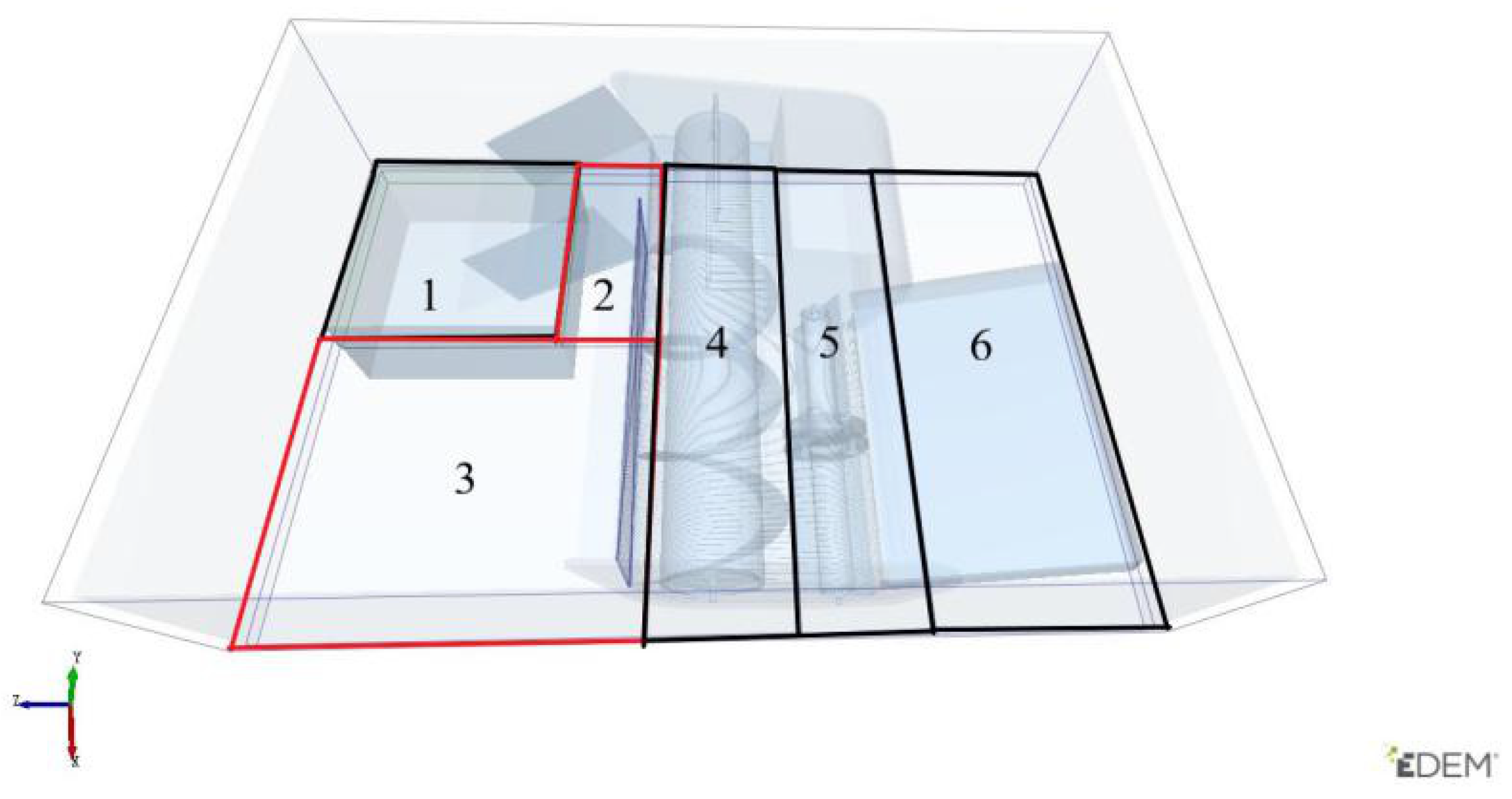
2.5.1. Physical Modeling
2.5.2. Simulation Parameter Setting
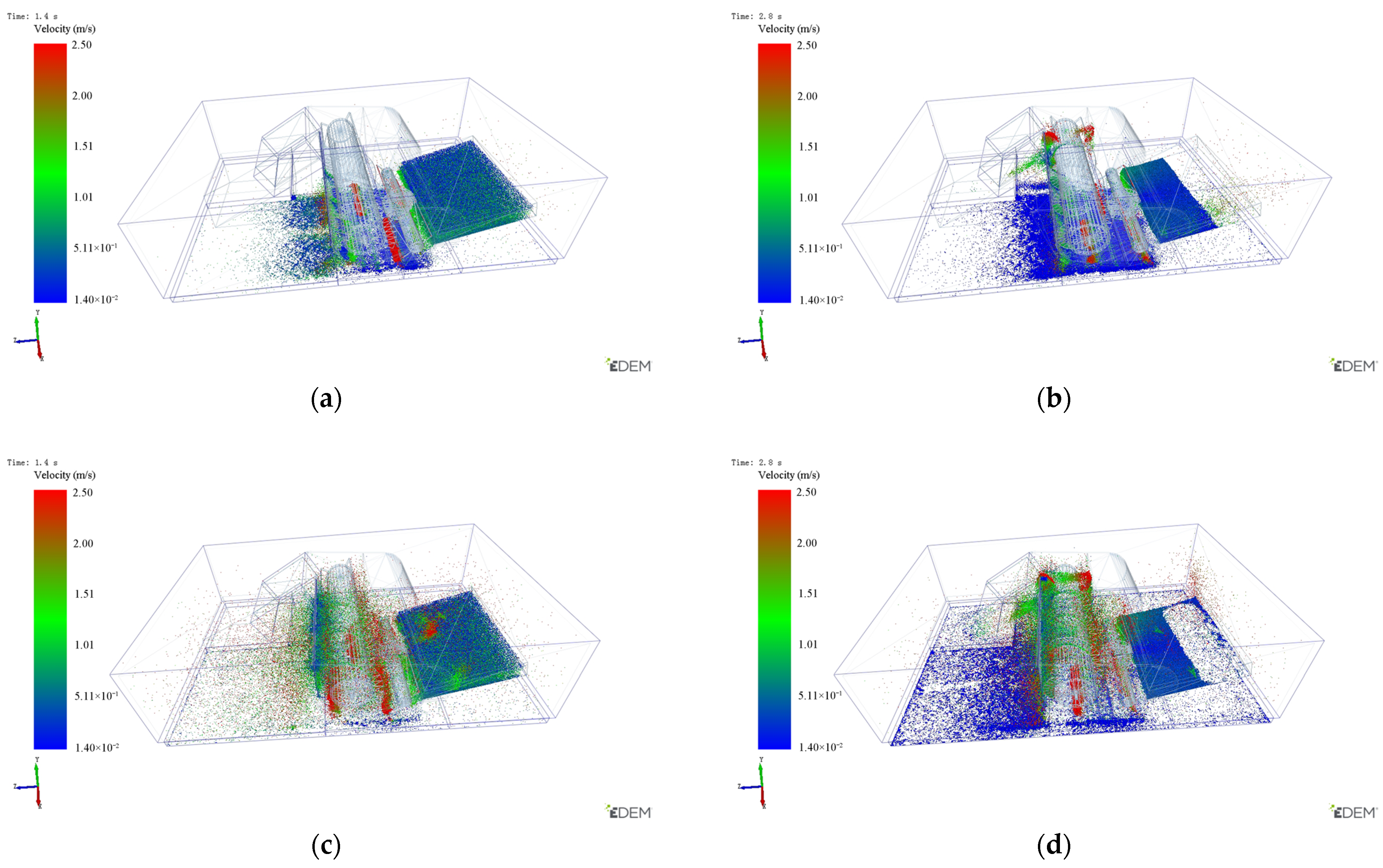
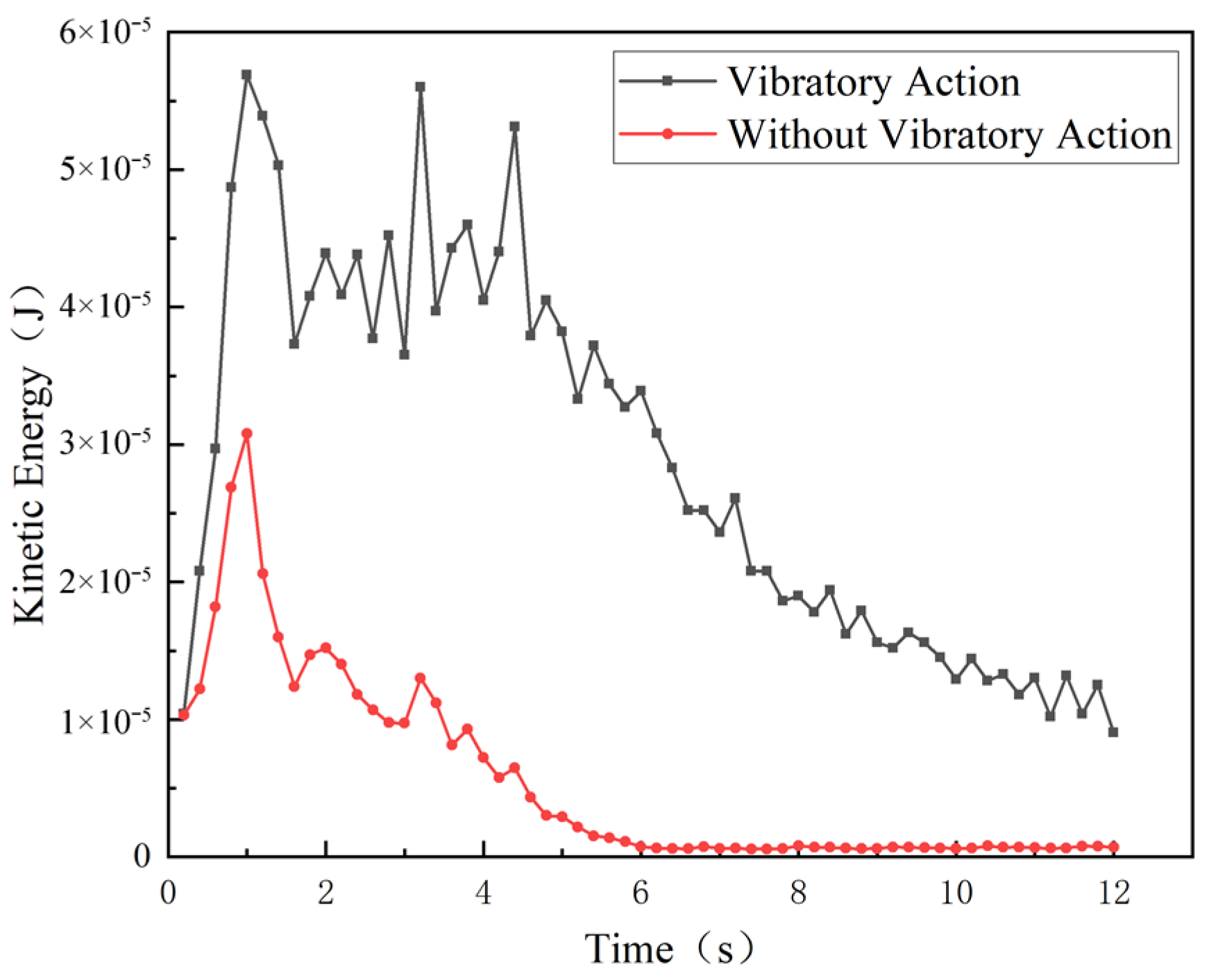
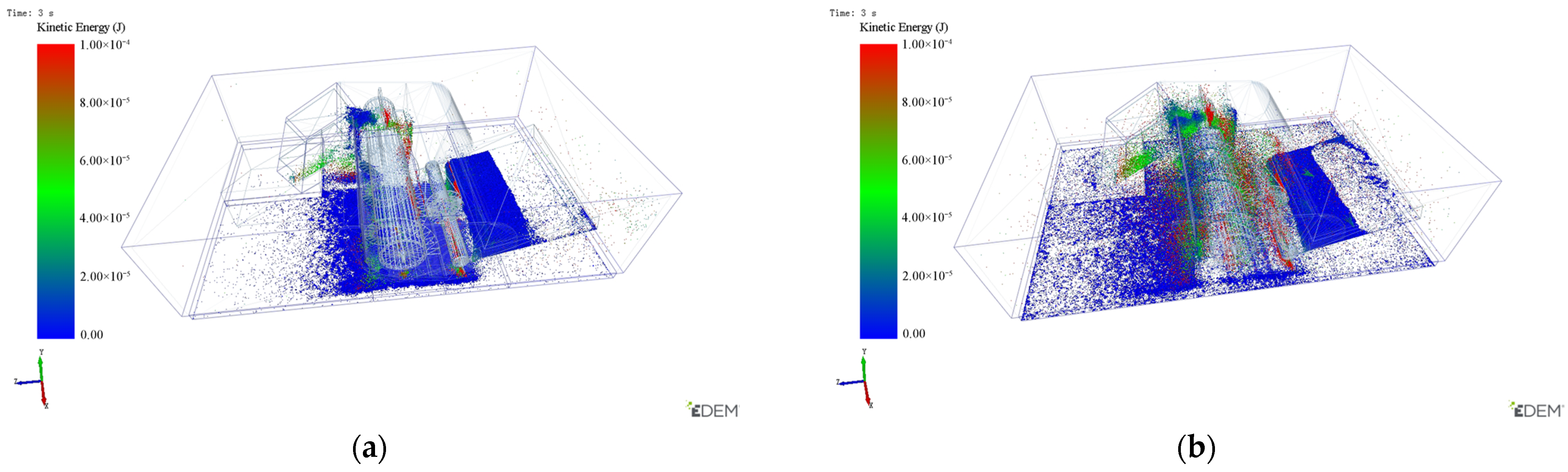
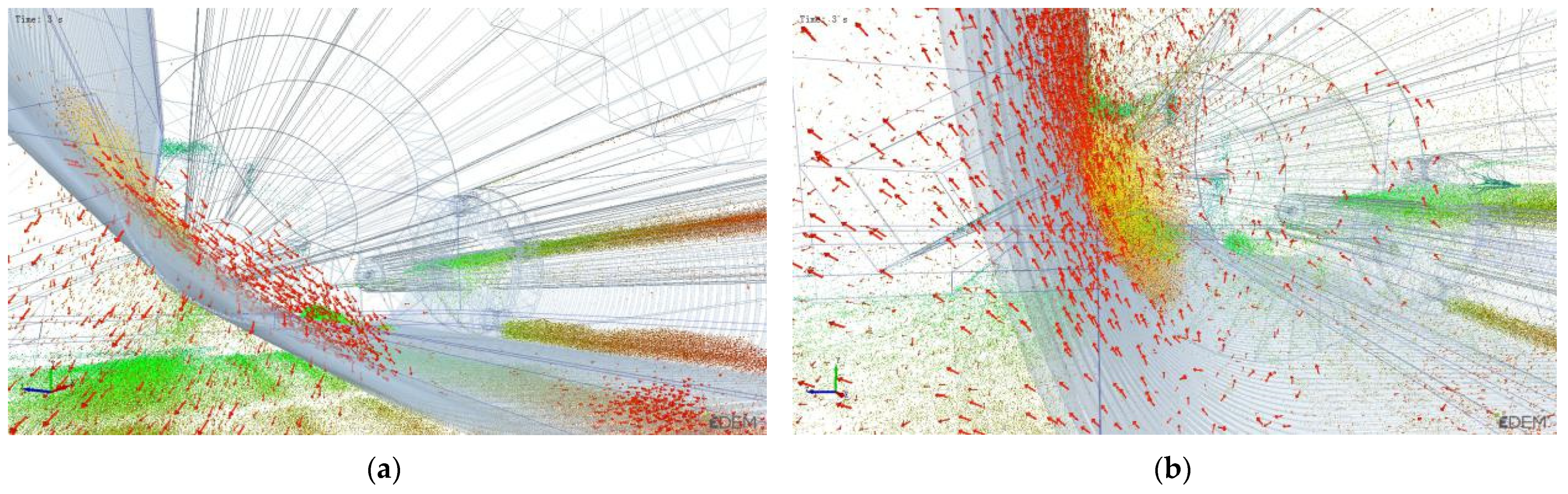
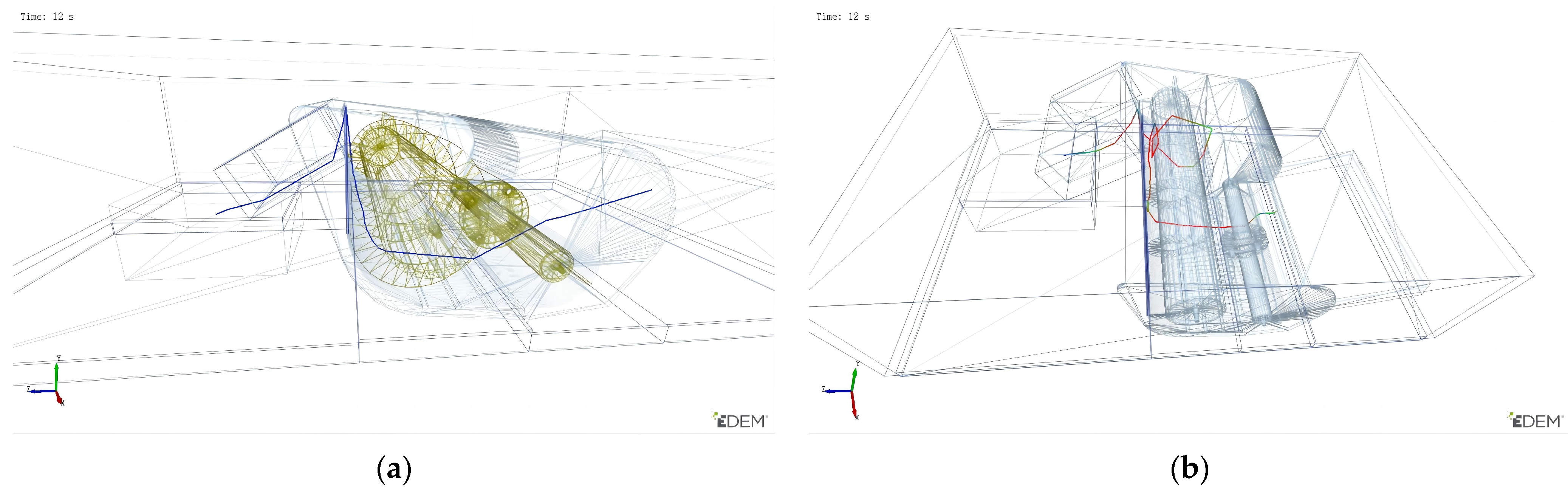
2.5.3. Contrastive Analysis of Sandy Soil Removal Process Simulation with and without Vibratory Action
2.6. Simulation Test Design
2.7. Evaluation Index
2.8. Field Test Method
3. Results and Discussion
3.1. Analysis of the Simulation Test Results
2.32X12 − 9.10X22 − 7.05X32
− 4.46X22 − 7.51X32
0.13X22 + 0.58X32
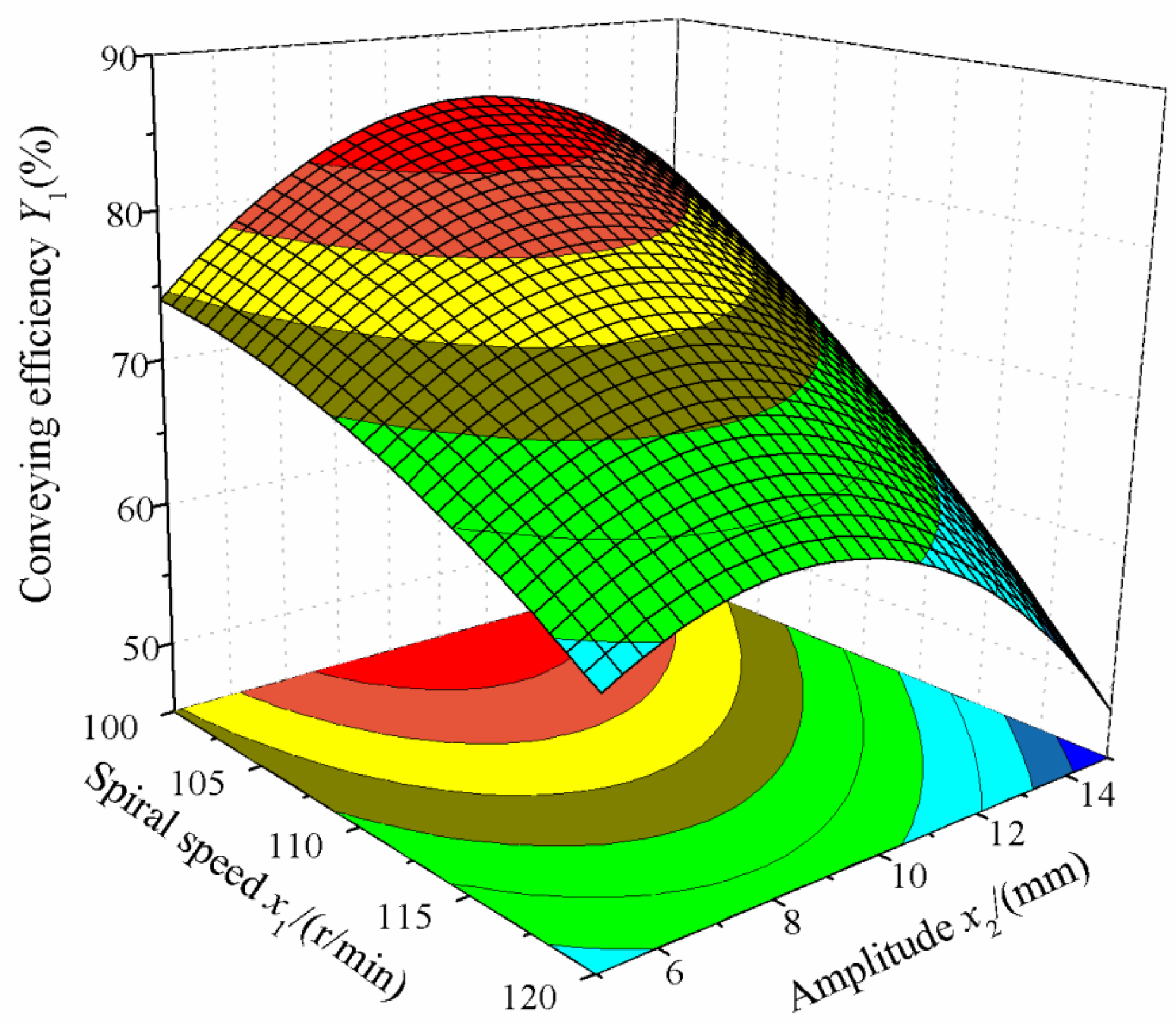
3.1.1. Influence of Various Factors on Conveyance Efficiency
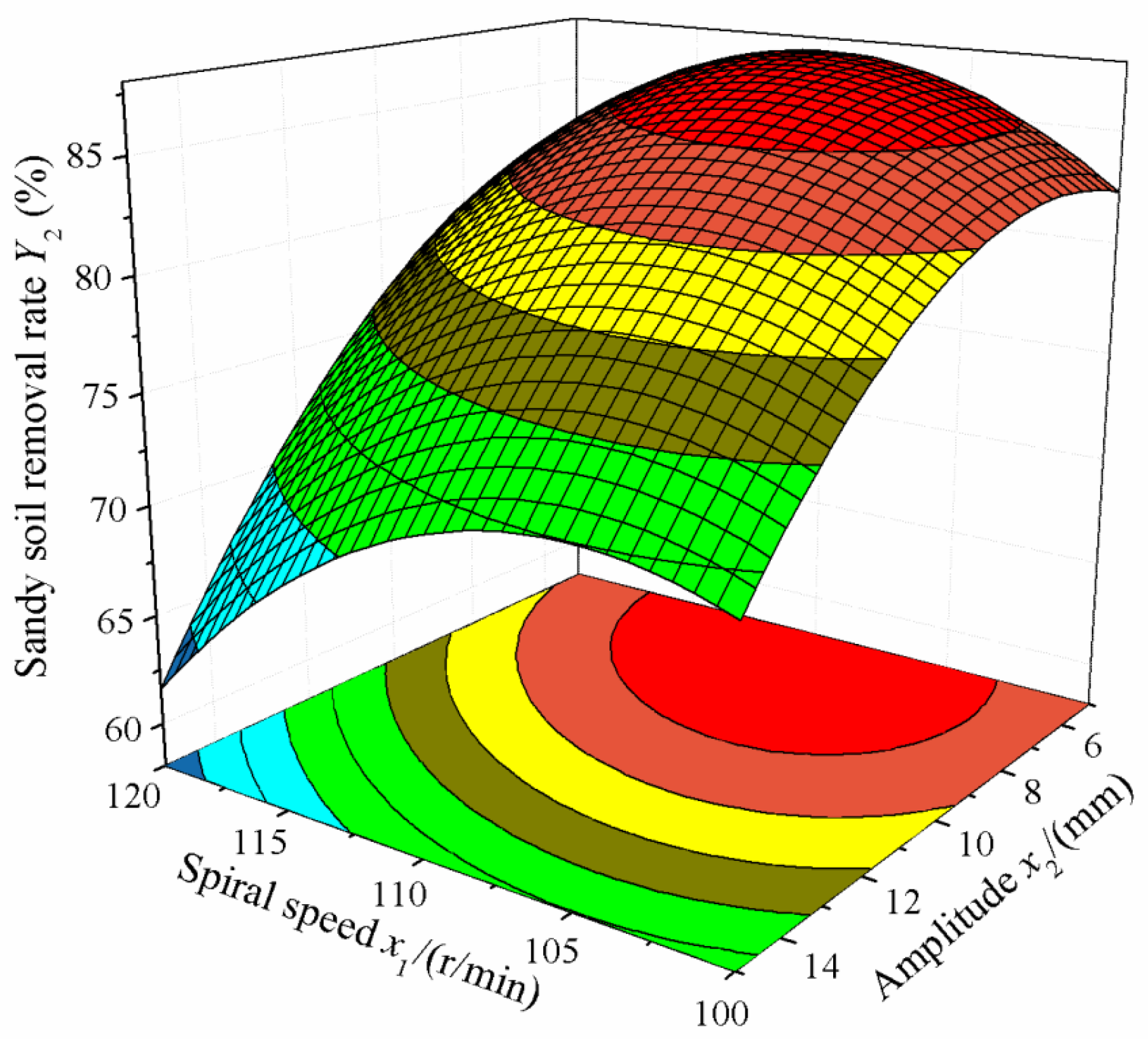
3.1.2. Influence of Various Factors on Sandy Soil Removal Rate
3.1.3. Influence of Various Factors on Variation Coefficient of Sandy Soil Removal Velocity
3.1.4. Operating Parameter Optimization
3.2. Field Test Result
4. Conclusions
5. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, X.Q.; Liu, H.; Lu, Z.Y.; Cheng, Y.C.; Zhang, D.J.; Bai, F.F.; Fang, J.; Ren, Y.F. Cultivation technology of windbreak and sand fixation of Cyperus esculentus L. on desertified and degraded land. Mod. Agric. 2019, 6, 12–13. [Google Scholar] [CrossRef]
- Oladele, A.K.; Aina, J.O. Chemical composition and functional properties of flour produced from two varieties of tiger nut (Cyperus esculentus). Afr. J. Biotechnol. 2007, 21, 2473–2476. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.Y.; Wang, X.S.; Xiang, H. A multi-purpose novel oil crop—Cyperus beans. China Oils Fats. 2019, 44, 1–4. [Google Scholar] [CrossRef]
- Qu, P.M.; Cheng, Z.Y.; Long, C.L.; Su, M.H.; Yang, D. Comprehensive development of chufa (Cyperus esculentus L. var. sativus). China Oils Fats. 2007, 9, 61–63. [Google Scholar] [CrossRef]
- Liu, X.M.; Liu, Z.H.; Liang, Y.; Xiao, S.P. Development of Multifunctional Harvesting Machine Based on Modular Theory. J. Chin. Agric. Mech. 2012, 5, 47–50. [Google Scholar] [CrossRef]
- Sánchez-Zapata, E.; Fernández-López, J.; Angel Pérez-Alvarez, J. Tiger nut commercialization: Health aspects, composition, properties, and food applications. Compr. Rev. Food Sci. Food Saf. 2012, 11, 366–377. [Google Scholar] [CrossRef]
- Di, Z.F.; Li, Q.L.; Jiang, W.; Zhang, Z.Q.; Zhang, H.; Li, N.; Cui, Z.K.; Zhou, J. Research advance and perspective of Cyperus esculentus planting and harvesting machinery technology and equipment. J. Shanxi Agric. Univ. 2022, 42, 96–106. [Google Scholar] [CrossRef]
- He, X.; Lv, Y.; Qu, Z.; Wang, W.; Zhou, Z.; He, H. Parameters optimization and test of caterpillar self-Propelled tiger nut harvester hoisting device. Agriculture 2022, 12, 1060. [Google Scholar] [CrossRef]
- Wanfangdata. Available online: https://d.wanfangdata.com.cn/patent/ChJQYXRlbnROZXdTMjAyMjEyMDcSEENOMjAxODIxMTUxMDUwLlgaCHBiMm4xdWYy (accessed on 30 April 2019).
- Wanfangdata. Available online: https://d.wanfangdata.com.cn/patent/ChJQYXRlbnROZXdTMjAyMjEyMDcSEENOMjAyMDEwNzczMDI5LjkaCDUzemxxcmxl (accessed on 9 October 2020).
- Wanfangdata. Available online: https://d.wanfangdata.com.cn/patent/ChJQYXRlbnROZXdTMjAyMjEyMDcSEENOMjAxNzEwMTIyMTc0LjkaCGR6aWdnY25z (accessed on 31 March 2017).
- Zhao, Q.L.; Chen, X.M.; Xu, S.; Liu, H.B. Application value and research status of its planter and harvester of Cyperus esculentus. Agric. Technol. Equip. 2022, 1, 76–77, 80. [Google Scholar]
- Fu, Q.K.; Fu, J.; Chen, Z.; Chen, C.; Ren, L.Q. Optimization of working parameters on soil removal of stover pickup baler by vibration. Trans. Chin. Soc. Agric. Eng. 2018, 34, 26–33. [Google Scholar] [CrossRef]
- Wei, Z.C.; Li, H.W.; Su, G.L.; Sun, C.Z.; Liu, W.Z.; Li, X.Q. Development of potato harvester with buffer type potato-impurity separation sieve. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–11. [Google Scholar] [CrossRef]
- Lü, J.Q.; Tian, Z.E.; Wu, J.E.; Yang, Y.; Shang, Q.Q.; Wang, Y.B. Design and experiment on 4U1Z vibrating potato digger. Trans. Chin. Soc. Agric. Eng. 2015, 31, 39–47. [Google Scholar] [CrossRef]
- Hu, Z.C.; Chen, Y.Q.; Wang, H.O.; Zhang, H.J.; Xie, H.X.; Tian, L.J. Design and experimental research on vibrating type peanut harvester. Trans. Chin. Soc. Agric. Eng. 2008, 10, 114–117. [Google Scholar] [CrossRef]
- Wang, D.W.; Shang, S.Q.; Li, X.; Gao, D.X. Type-L Cleaning Separation Mechanism of Peanut Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2013, 44, 68–74+51. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Wang, F.A.; Zhang, Y.C.; Zhang, D.; Tian, R. Design and Experiment of Self-propelled Panax notoginseng Harvester. Trans. Chin. Soc. Agric. Mach. 2016, 47, 234–240. [Google Scholar] [CrossRef]
- Liu, J.J.; Song, J.N.; Wang, J.C. Kinematics and Mechanics Research on Vibration Separate Equipment of Garlic Harvesting Machine. J. Hunan Agric. Univ. (Nat. Sci.) 2006, 5, 536–539. [Google Scholar] [CrossRef]
- Shahgoli, G.; Fielke, J.; Desbiolles, J.; Saunders, C. Optimising oscillation frequency in oscillatory tillage. Soil Tillage Res. 2009, 106, 202–210. [Google Scholar] [CrossRef]
- Rao, N.R.N.V.G.; Chaudhary, H.; Sharma, A.K. Optimal design and analysis of oscillatory mechanism for agricultural tillage operation. SN Appl. Sci. 2019, 1, 1003. [Google Scholar] [CrossRef] [Green Version]
- Niyamapa, T.; Salokhe, V.M. Soil disturbance and force mechanics of vibrating tillage tool. J. Terramech. 2000, 37, 151–166. [Google Scholar] [CrossRef]
- Xing, X.; Qin, Z.; Cao, S.B.; Feng, X.J. Design of Vibration Device for Yam Harvester. J. Agric. Mech. Res. 2019, 41, 126–130. [Google Scholar] [CrossRef]
- Cheng, C.; Fu, J.; Chen, Z.; Ren, L.Q. Effect of vibration parameters of vibrating screen for harvester on adhesion characteristics of threshed mixtures with different moistures. Trans. Chin. Soc. Agric. Eng. 2019, 35, 29–36. [Google Scholar] [CrossRef]
- Fu, W.; Chen, H.T.; Kan, Z. Optimizing parameters on vibration breakshovel of radish harvester. Trans. Chin. Soc. Agric. Eng. 2011, 27, 46–50. [Google Scholar] [CrossRef]
- Barrios, G.K.P.; Carvalho, R.M.; Kwade, A.; Tavares, L.M. Contact parameter estimation for DEM simulation of iron ore pellet handling. Powder Technol. 2013, 248, 84–93. [Google Scholar] [CrossRef]
- Liu, W.Z.; He, J.; Li, H.W.; Li, X.Q.; Zheng, K.; Wei, Z.C. Calibration of Simulation Parameters for Potato Minituber Based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135, 142. [Google Scholar] [CrossRef]
- Leblicq, T.; Smeets, B.; Vanmaercke, S.; Ramon, H.; Saeys, W. A discrete element approach for modelling bendable crop stems. Comput. Electron. Agric. 2016, 124, 141–149. [Google Scholar] [CrossRef]
- Horváth, D.; Poós, T.; Tamás, K. Modeling the movement of hulled millet in agitated drum dryer with discrete element method. Comput. Electron. Agric. 2019, 162, 254–268. [Google Scholar] [CrossRef]
- Qi, J.T.; An, S.G.; Kan, Z.; Meng, H.W.; Li, Y.P.; Zhao, X.Y. Discrete element-based calibration of simulation parameters of Cyperus esculentus L. (tiger nut) planted in sandy soil. J. Food Process. Preserv. 2021, 45, e15631. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modeling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Defining the effect of sweep tillage tool cutting edge geometry on tillage forces using 3D discrete element modeling. Inf. Process. Agric. 2015, 2, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Han, D.L.; Ji, Q.L.; He, Y.; Li, J.Q. Calibration Methods of Sandy Soil Parameters in Simulation of Discrete Element Method. Trans. Chin. Soc. Agric. Mach. 2017, 48, 49–56. [Google Scholar] [CrossRef]
- Dun, G.Q.; Yu, C.L.; Yang, Y.Z.; Ye, J.; Du, J.X.; Zhang, J.T. Parameter simulation optimization and experiment of seed plate type hole for soybean breeding. Trans. Chin. Soc. Agric. Eng. 2019, 35, 62–73. [Google Scholar] [CrossRef]
- Hao, J.J.; Nie, Q.L.; Ma, L.P.; Li, J.C.; Song, Y.H.; Long, S.F. Development of cone disc type shelling mechanism for pcanut seeds. Trans. Chin. Soc. Agric. Eng. 2020, 36, 27–34. [Google Scholar] [CrossRef]
- Niu, K.; Yuan, Y.W.; Luo, M.; Liu, Y.C.; Lu, C.X.; Fang, X.F. Design and experiment of potato metering device with double-deck seed tank. Trans. Chin. Soc. Agric. Eng. 2016, 32, 32–39. [Google Scholar] [CrossRef]
- Lei, X.L.; Liao, Y.T.; Liao, Q.X. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Xie, S.; Wang, C.; Deng, W. Experiment of a swing separating sieve on a potato digger. Eng. Agrícola 2019, 39, 548–554. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.W.; Zhao, J.W.; Zhu, H.K.; Yuan, H.B.; Ye, Y.; Chen, Q.S. Parameter optimization of black tea fermentation machine based on RSM and BP-AdaBoost-GA. Trans. Chin. Soc. Agric. Mach. 2017, 48, 335–342. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Poisson’s Ratio | Density (kg/m3) | Elasticity Modulus (Mpa) |
|---|---|---|---|
| Sandy soil | 0.3 | 1638 | 29.9 |
| Tiger nut | 0.41 | 1089 | 1.5 × 102 |
| Geometry | 0.28 | 7850 | 2.099 × 103 |
| a/b/c | Sandy Soil | Tiger Nut | Geometry |
|---|---|---|---|
| Sandy soil | 0.15/0.8/0.2 | 0.15/0.8/0.1 | 0.5/0.5/0.1 |
| Tiger nut | / | 0.437/0.48/0.05 | 0.454/0.413/0.0675 |
| Geometry | / | / | / |
| Code | Spiral Speed/(r/min) | Amplitude/(mm) | Vibration Frequency/(Hz) |
|---|---|---|---|
| –1 | 100 | 5 | 10 |
| 0 | 110 | 10 | 11 |
| 1 | 120 | 15 | 12 |
| No. | Spiral Speed X1/(r/min) | Amplitude X2/(mm) | Vibration Frequency X3/(Hz) | Conveyance Efficiency Y1/(%) | Sandy Soil Removal Rate Y2/(%) | Variation Coefficient of Sandy Soil Removal Velocity Y3/(%) |
|---|---|---|---|---|---|---|
| 1 | –1 | –1 | 0 | 72.67 | 81.98 | 4.5 |
| 2 | 1 | –1 | 0 | 61.42 | 80.44 | 4.7 |
| 3 | –1 | 1 | 0 | 78.41 | 73.54 | 6.2 |
| 4 | 1 | 1 | 0 | 49.78 | 61.90 | 2.4 |
| 5 | –1 | 0 | –1 | 81.38 | 70.04 | 3.5 |
| 6 | 1 | 0 | –1 | 62.07 | 66.58 | 4.2 |
| 7 | –1 | 0 | 1 | 76.6 | 76.19 | 6.7 |
| 8 | 1 | 0 | 1 | 50.43 | 72.85 | 5.2 |
| 9 | 0 | –1 | –1 | 70.78 | 78.72 | 4.1 |
| 10 | 0 | 1 | –1 | 63.48 | 59.65 | 3.1 |
| 11 | 0 | –1 | 1 | 56.68 | 83.23 | 5.9 |
| 12 | 0 | 1 | 1 | 52.45 | 66.60 | 4.0 |
| 13 | 0 | 0 | 0 | 78.54 | 84.70 | 3.2 |
| 14 | 0 | 0 | 0 | 75.02 | 83.00 | 3.2 |
| 15 | 0 | 0 | 0 | 79.95 | 83.40 | 3.8 |
| 16 | 0 | 0 | 0 | 76.43 | 85.10 | 3.6 |
| 17 | 0 | 0 | 0 | 75.02 | 83.90 | 4.0 |
| Source | Conveyance Efficiency Y1 | Sandy Soil Removal Rate Y2 | Variation Coefficient of Sandy Soil Removal Velocity Y3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Sum of Squares | F Value | p-Value | Sum of Squares | F Value | p Value | Sum of Squares | F Value | p-Value | |
| Model | 1885.78 | 40.07 | <0.0001 ** | 1116.8 | 48.86 | <0.0001 ** | 19.55 | 6.25 | 0.0123 |
| X1 | 910.79 | 174.17 | <0.0001 ** | 49.9 | 19.65 | 0.0030 ** | 2.42 | 6.96 | 0.0335 * |
| X2 | 37.98 | 7.26 | 0.0309 * | 491.1 | 193.65 | <0.0001 ** | 1.53 | 4.4 | 0.0741 |
| X3 | 215.80 | 41.27 | 0.0004 ** | 71.28 | 28.07 | 0.0011 ** | 5.95 | 17.11 | 0.0044 ** |
| X1X2 | 75.52 | 14.44 | 0.0067 ** | 25.5 | 10.04 | 0.0157 * | 4 | 11.5 | 0.0116 * |
| X1X3 | 11.76 | 2.25 | 0.1773 | 0.0036 | 0.0015 | 0.971 | 1.21 | 3.48 | 0.1044 |
| X2X3 | 2.36 | 0.45 | 0.5236 | 1.49 | 0.59 | 0.4689 | 0.2 | 0.58 | 0.4704 |
| X12 | 22.76 | 4.35 | 0.0754 | 109.3 | 43.04 | 0.0003 ** | 2.42 | 6.95 | 0.0336 * |
| X22 | 348.46 | 66.64 | <0.0001 ** | 83.75 | 32.98 | 0.0007 ** | 0.074 | 0.21 | 0.6588 |
| X32 | 209.11 | 39.99 | 0.0004 ** | 237.47 | 93.51 | <0.0001 ** | 1.43 | 4.11 | 0.0823 |
| Residual | 36.60 | 17.78 | 2.43 | ||||||
| Lack of Fit | 17.37 | 1.20 | 0.4156 | 14.71 | 6.39 | 0.0525 | 1.92 | 5.01 | 0.0769 |
| Pure Error | 19.24 | 3.07 | 0.51 | ||||||
| Cor Total | 1922.38 | 1134.57 | 21.98 | ||||||
| R2 | 0.9810 | 0.9843 | 0.8893 | ||||||
| C.V | 3.35% | 2.10% | 13.87% | ||||||
| Item | Value |
|---|---|
| Overall dimension/mm | 5750 × 2300 × 3000 |
| Working width/mm | 1300 |
| Working depth/mm | 150 |
| Auxiliary power/kW | 60 |
| Operating speed/km/h | 0.8~1.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, J.; Pei, M.; Kan, Z.; Meng, H. Parameter Optimization and Testing of a Conveying and Soil-Removing Device for Tiger Nut (Cyperus esculentus) Mechanical Harvesting. Processes 2023, 11, 67. https://doi.org/10.3390/pr11010067
Qi J, Pei M, Kan Z, Meng H. Parameter Optimization and Testing of a Conveying and Soil-Removing Device for Tiger Nut (Cyperus esculentus) Mechanical Harvesting. Processes. 2023; 11(1):67. https://doi.org/10.3390/pr11010067
Chicago/Turabian StyleQi, Jiangtao, Minghao Pei, Za Kan, and Hewei Meng. 2023. "Parameter Optimization and Testing of a Conveying and Soil-Removing Device for Tiger Nut (Cyperus esculentus) Mechanical Harvesting" Processes 11, no. 1: 67. https://doi.org/10.3390/pr11010067
APA StyleQi, J., Pei, M., Kan, Z., & Meng, H. (2023). Parameter Optimization and Testing of a Conveying and Soil-Removing Device for Tiger Nut (Cyperus esculentus) Mechanical Harvesting. Processes, 11(1), 67. https://doi.org/10.3390/pr11010067