Modeling of a Wind Power System Using the Genetic Algorithm Based on a Doubly Fed Induction Generator for the Supply of Power to the Electrical Grid

Abstract
:1. Introduction
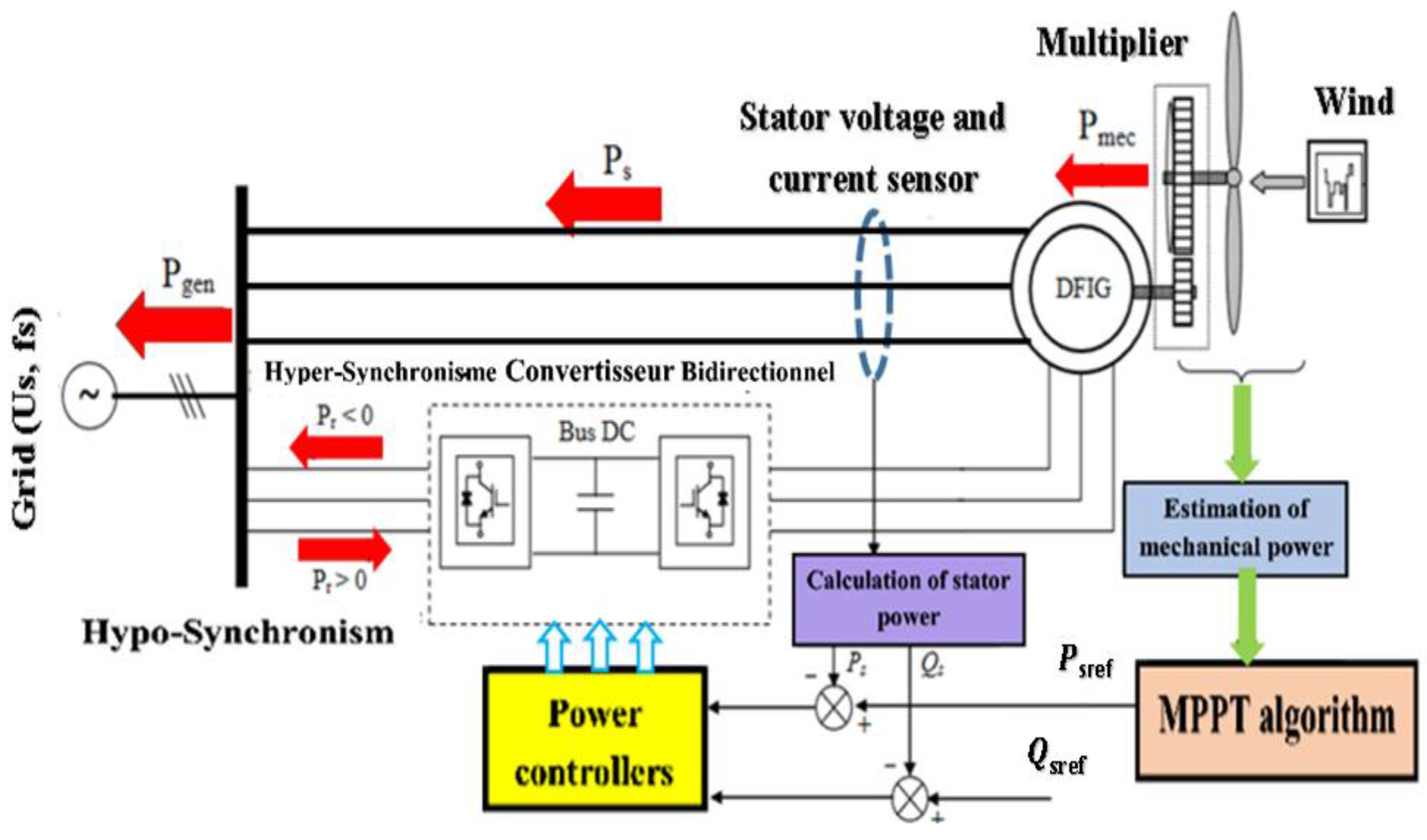
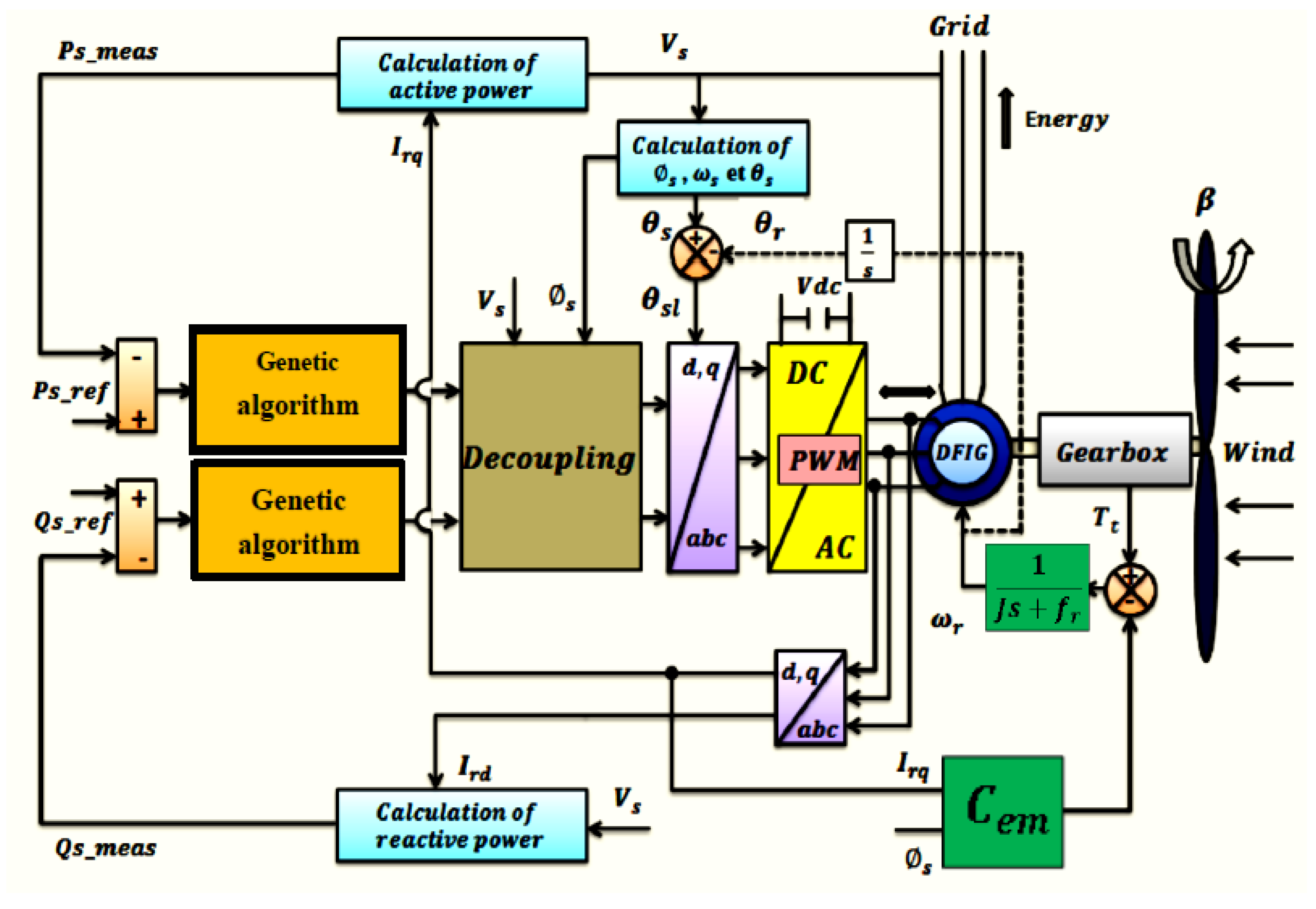
- Study of a system consisting of a variable wind speed wind turbine and an asynchronous dual-feed machine (DFIG) connected to the grid by a stator and fed by a transducer.
- The response of the system was verified by applying the proposed regulator in terms of its effectiveness towards the active and reactive power.
- Improvement in the results obtained through previous published works, in terms of response time, accuracy, low error, and stability.
2. Definition of Optimization
3. Objective Function and Fitness
4. Maximization of Power without Speed Control
5. Basic Structure of a Fuzzy Maximum Power Point Tracking Command
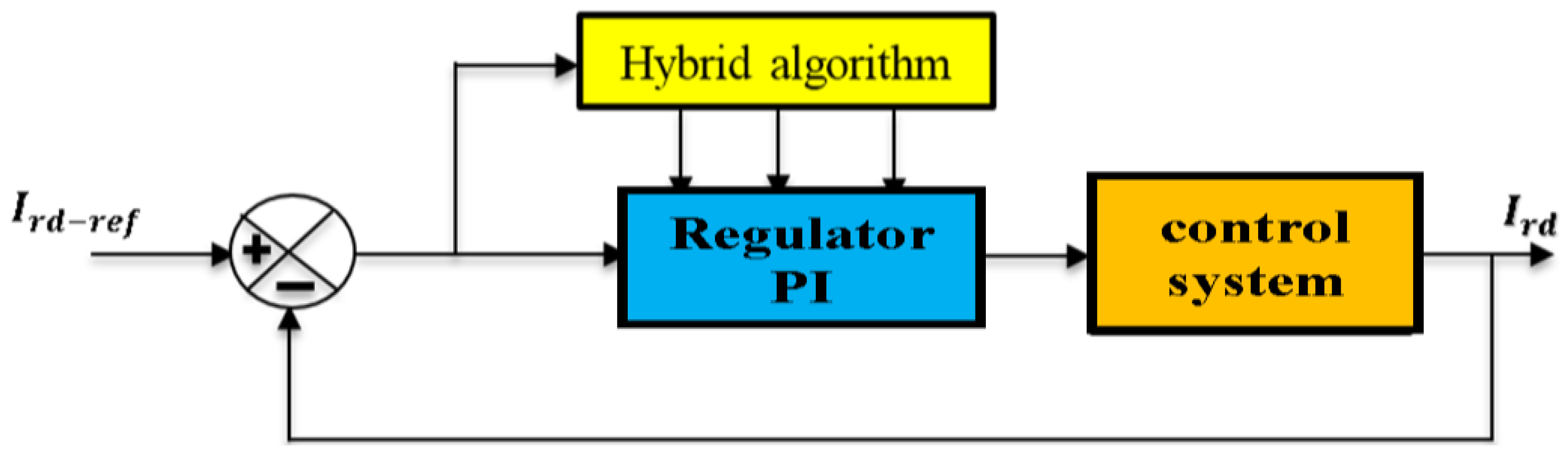
6. Current Rotor Prediction Prediction
7. System Description
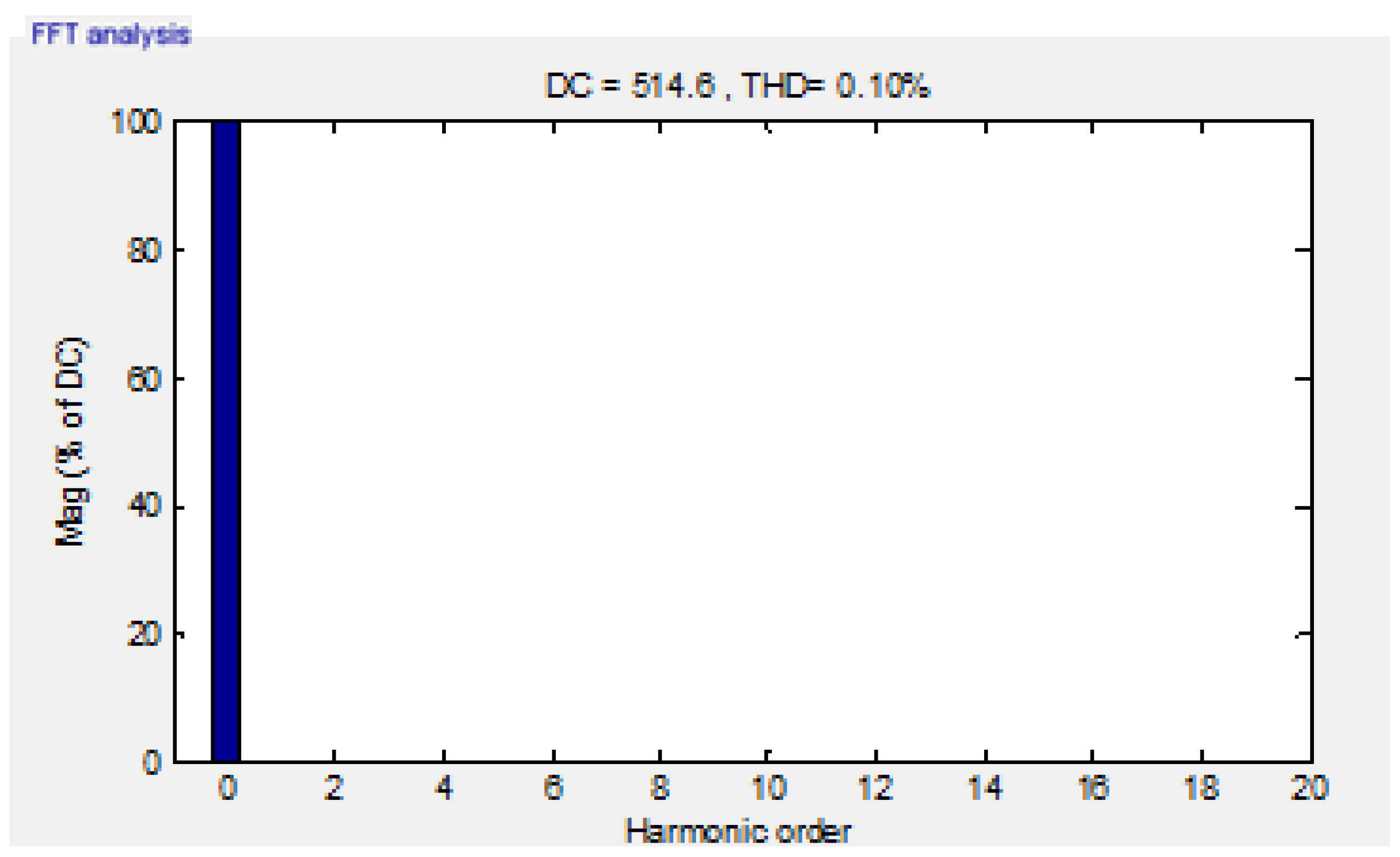
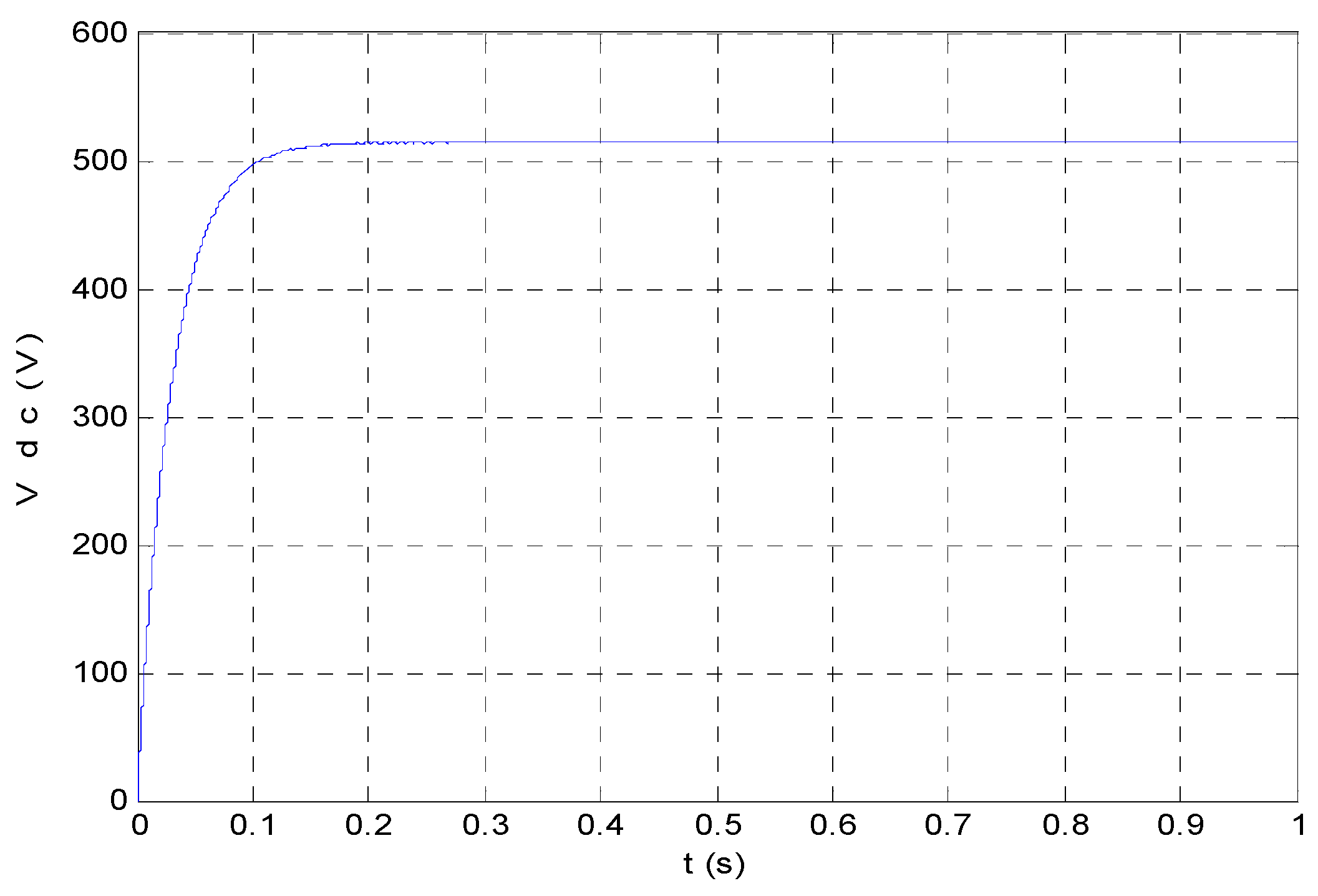
- ❖ The DC bus voltage responds faster and without overshoot, reaching the set value of 514.6 V.
- ❖ The shape of the DC vector voltage is smoother, which has the advantage of changing the wind speed.
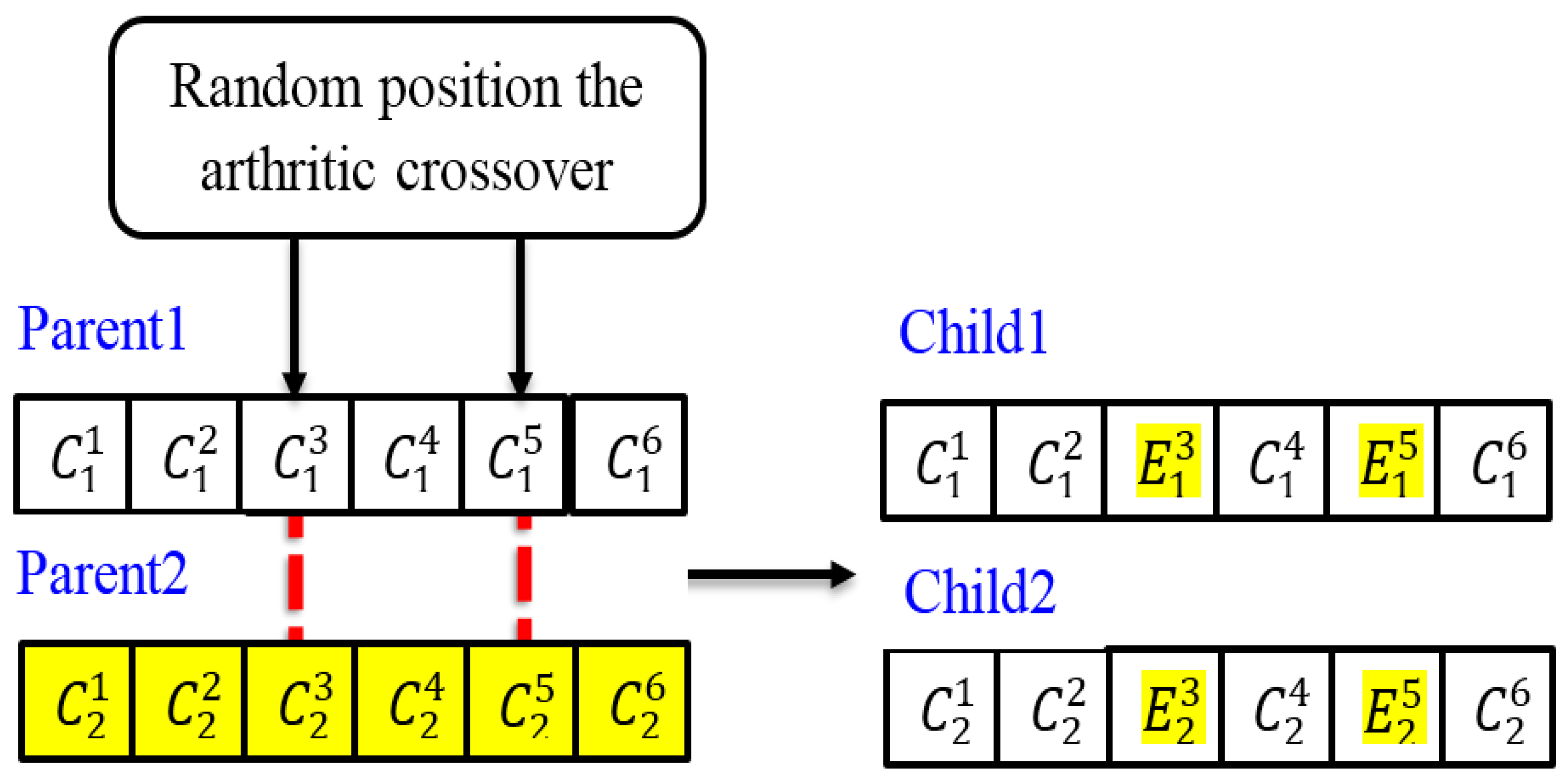
8. Arithmetic Crossing (Barycentric)
9. Optimization of Doubly Fed Induction Generator Regulators by Genetic Algorithm
- In the first step, we choose the matrix at random, which contains a set of solutions.
- In the second step, through the value of KP and KI calculated in the PI regulator, we choose the KP domain and KI domain from the random matrix.
- In the third step, through the specified range, we choose the optimal and exact KP and KI values.
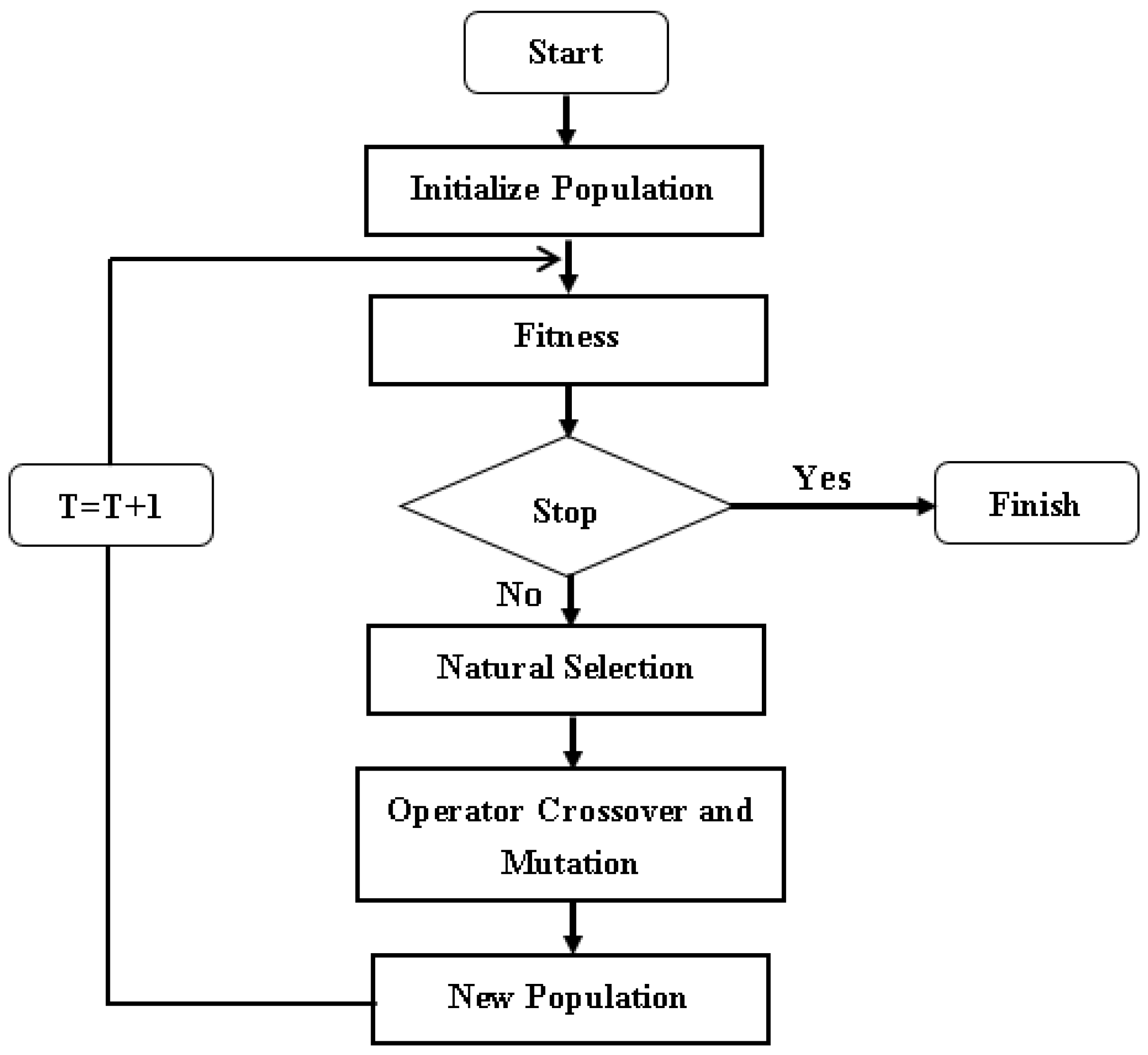
- An initial offspring is randomly born.
- Evaluate this offspring.
- Apply genetic operators (selection, crossing, mutation).
- Evaluate the sort of the new offspring created through genetic operators.
- Repeat the process for a given variety of offspring.
- Choose the best character from the new offspring.
- Use a nearby seek approach (gradient or simplex) to finalize the optimization operation achieved by using the genetic algorithm.
10. Optimization of the Classic PI Regulator
- Size of the offspring T = 20.
- Selection using roulette.
- Multiple crossing with a chance pc = 0.8.
- Uniform mutation with opportunity pm = 0.01.
- Number of offspring N = 49.
- Hybridization technique: simplex.
11. Setting Genetic Algorithm Parameters:
- Probability of crossing: The probability of crossing has a considerable influence on the convergence speed of a genetic algorithm The greater it is, the more it promotes the recombination of individuals while promoting falling into an optimum local. Typical values for this parameter range from 0.6 to 0.95.
- Probability of mutation: It must be quite low compared to that of the crossing so as not to disturb the evolution of the algorithm A high value will transform the algorithm into a random search, while a very low value will make the extraction of local optima impossible. Typical values for this parameter range from 0.001 to 0.2.
Mutation
12. Simulation Results and Discussion
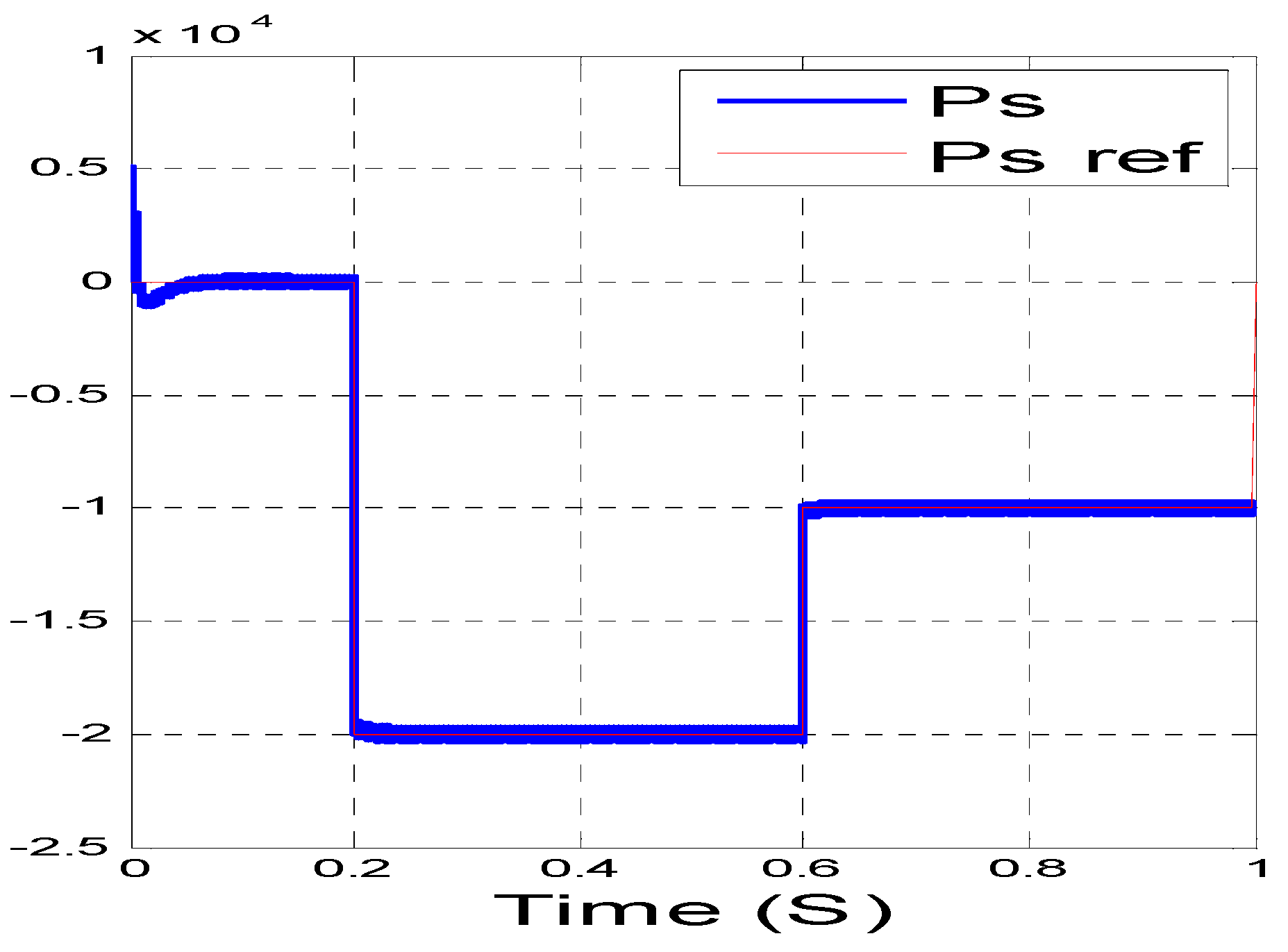
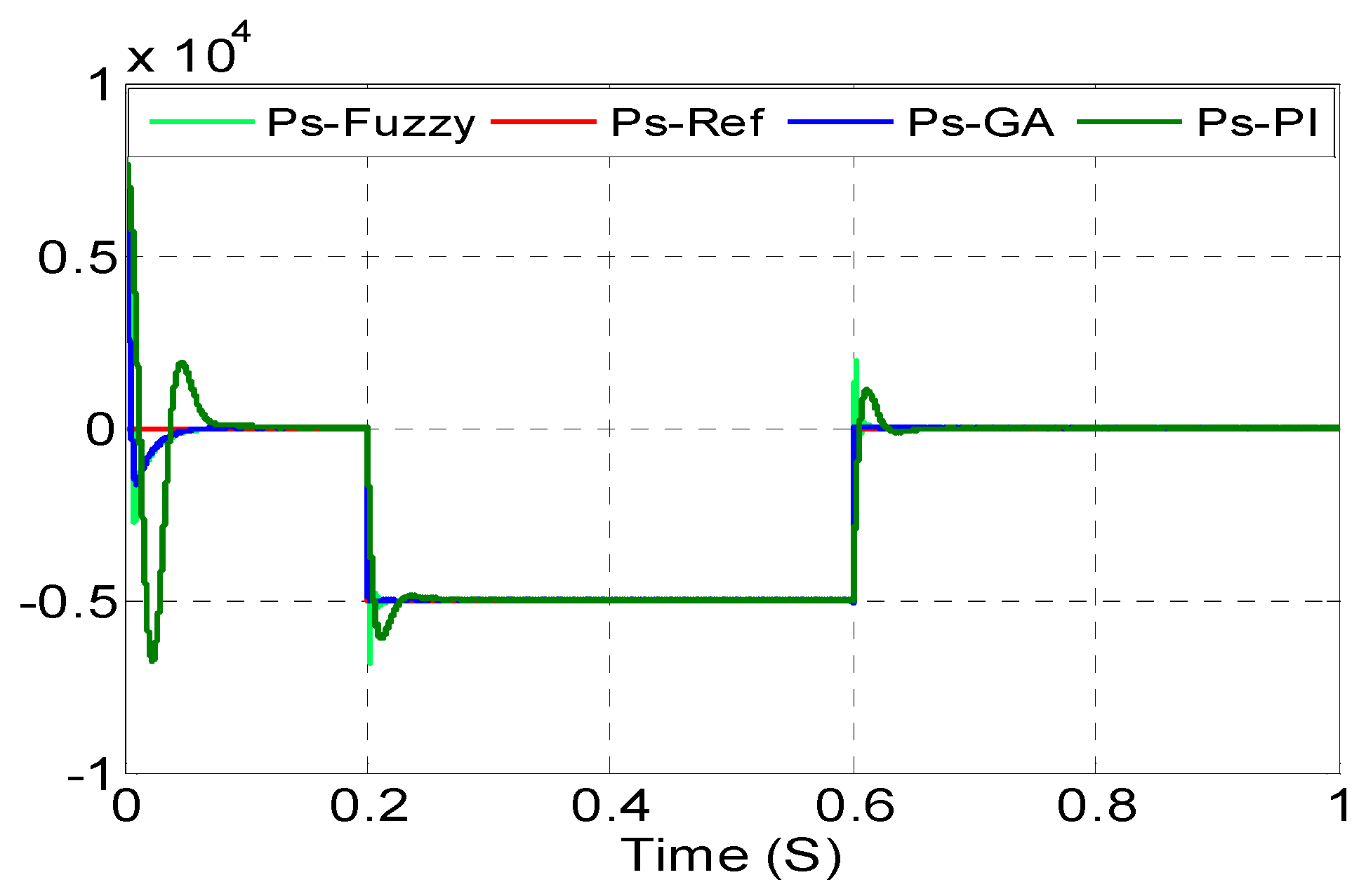
- (Pref = 0 W); so that t s.
- (Pref = −20,000 W) Negative scale; so that t s.
- (Pref = −10,000 W); so that t s.
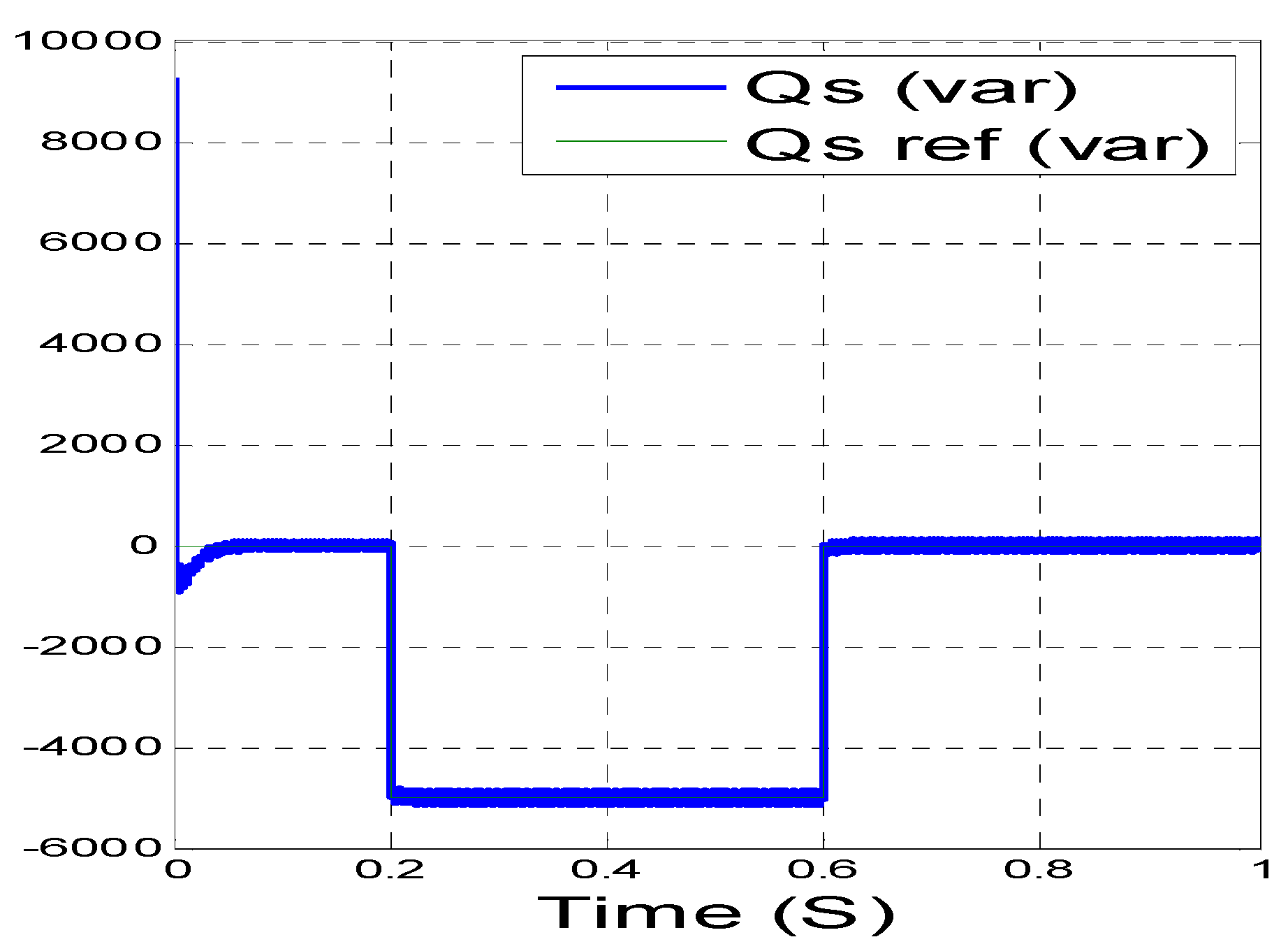
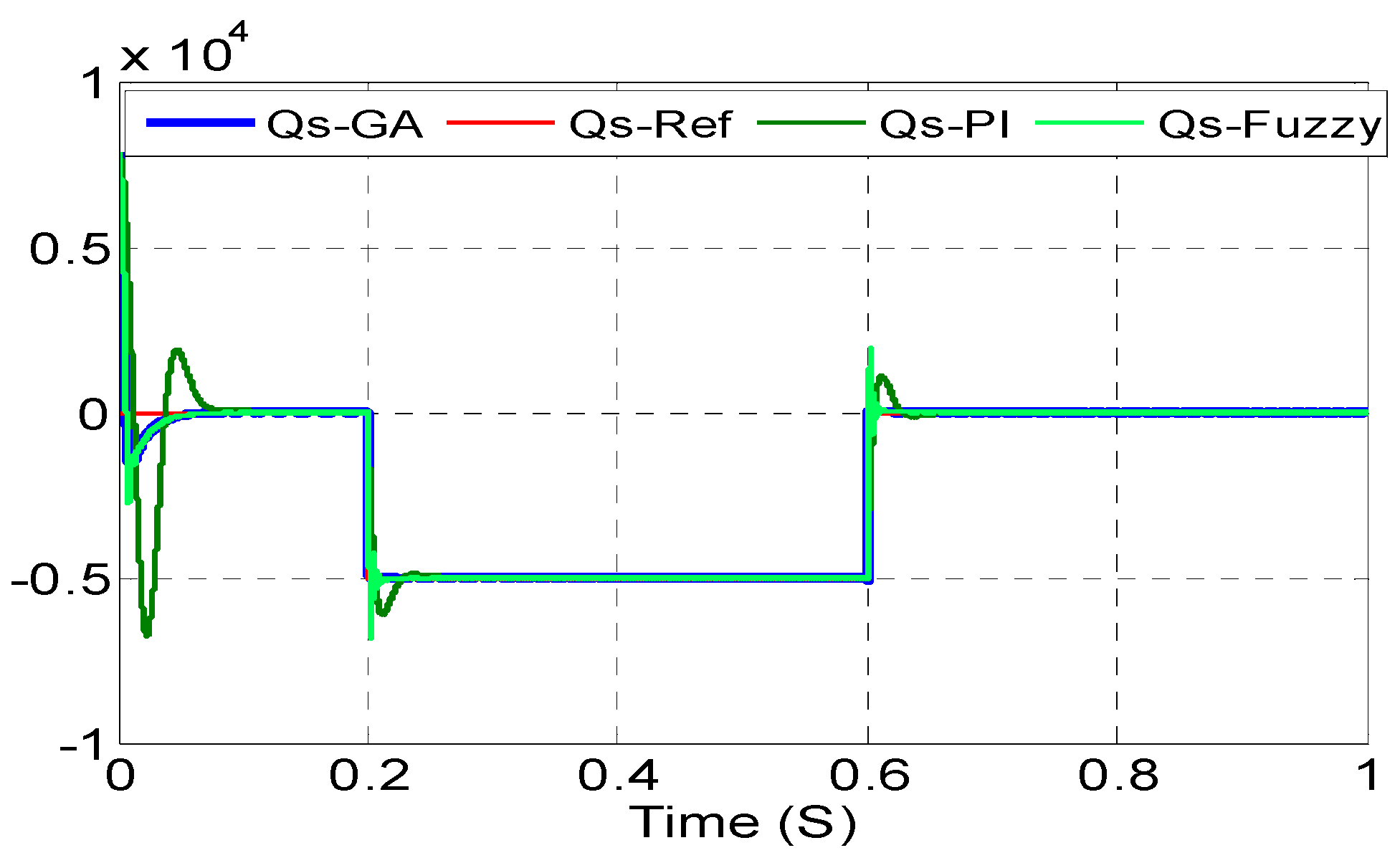
- Reactive power:
- (Qref = 0 VAR); so that t s.
- (Qref = −5000 VAR) Negative scale; so that t s.
- (Qref = 0 VAR); so that t s.
- Maximum error (overshoot).
- The recovery or stabilization time (the response time).
- The residual error (the static error).
- -
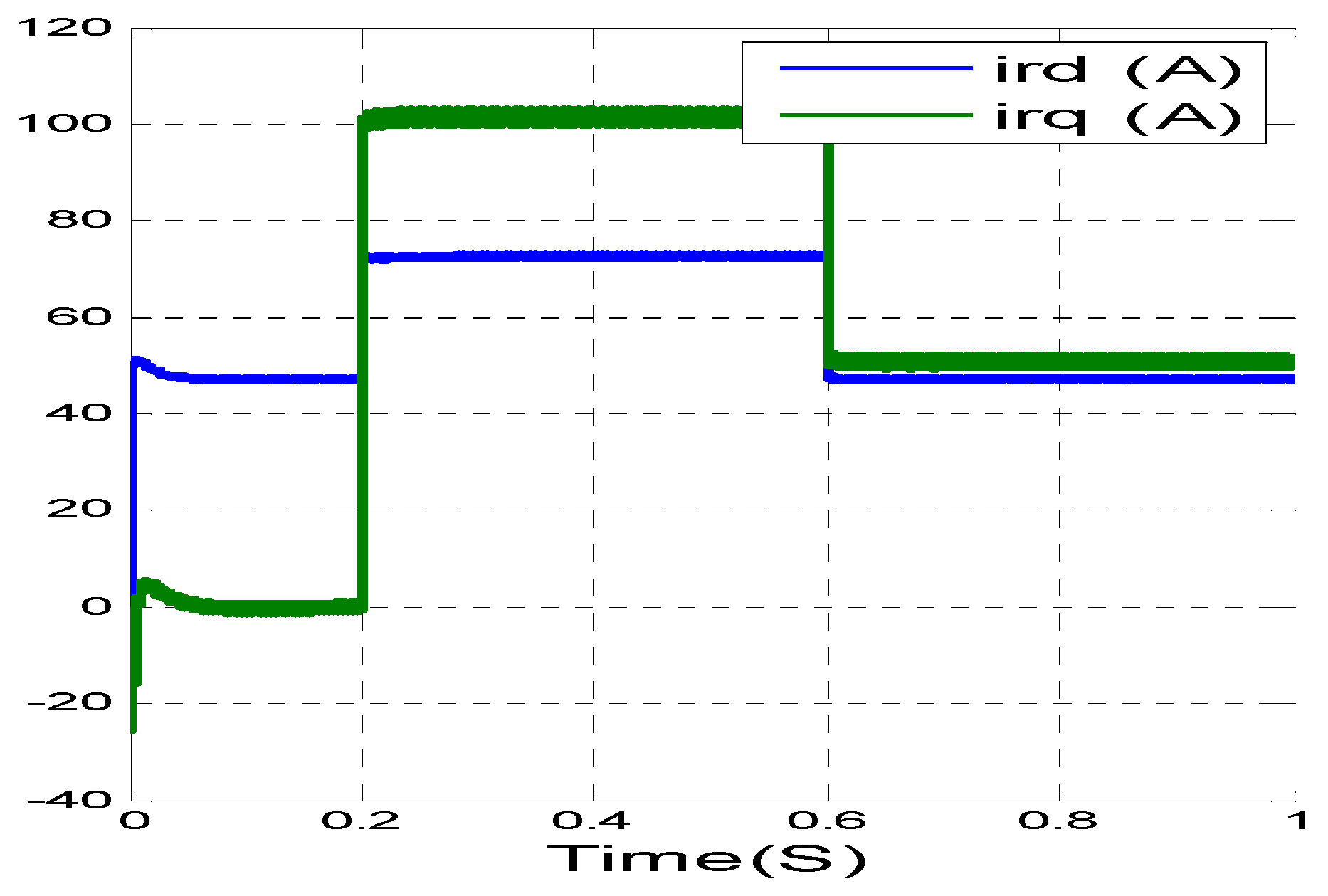
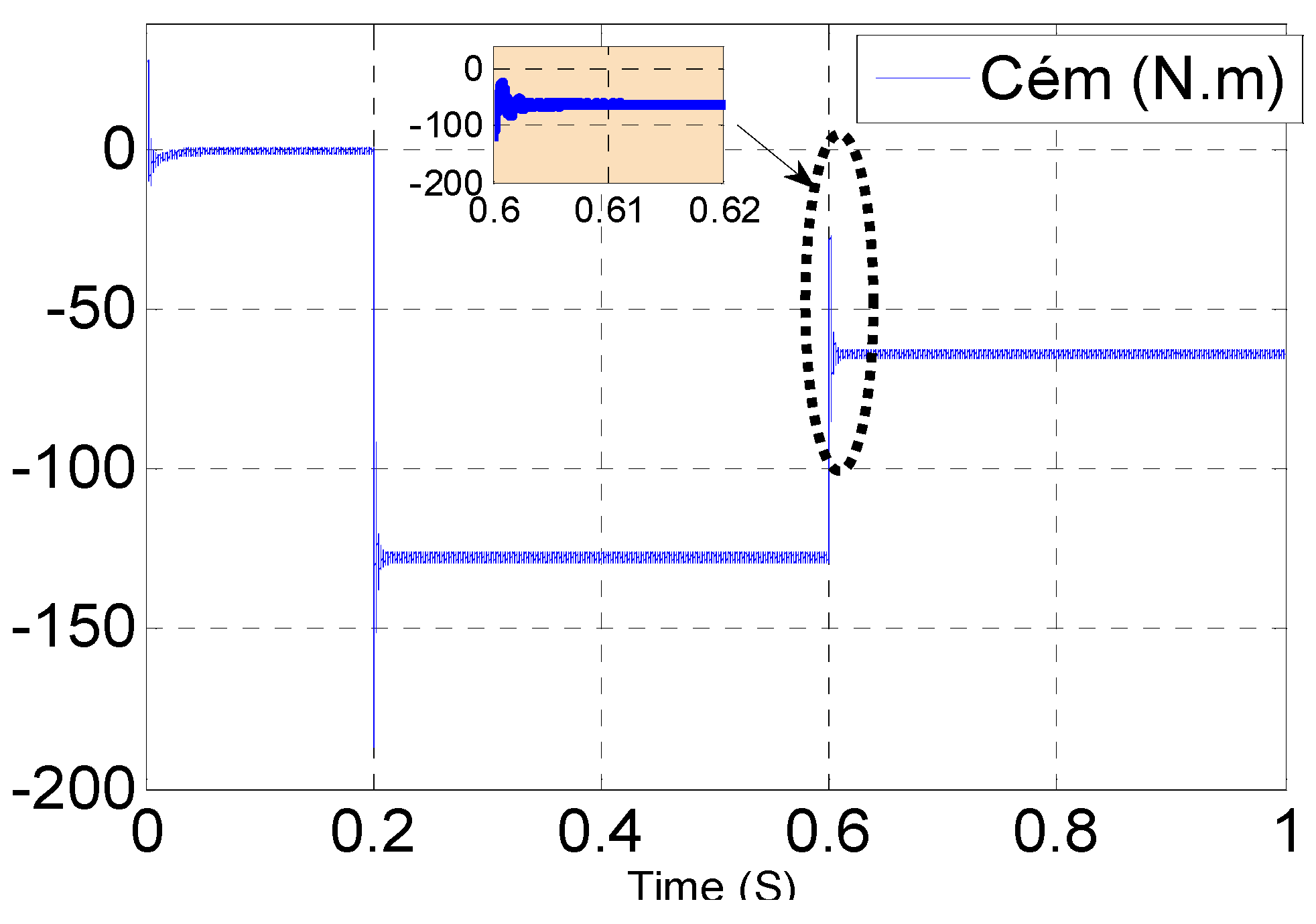
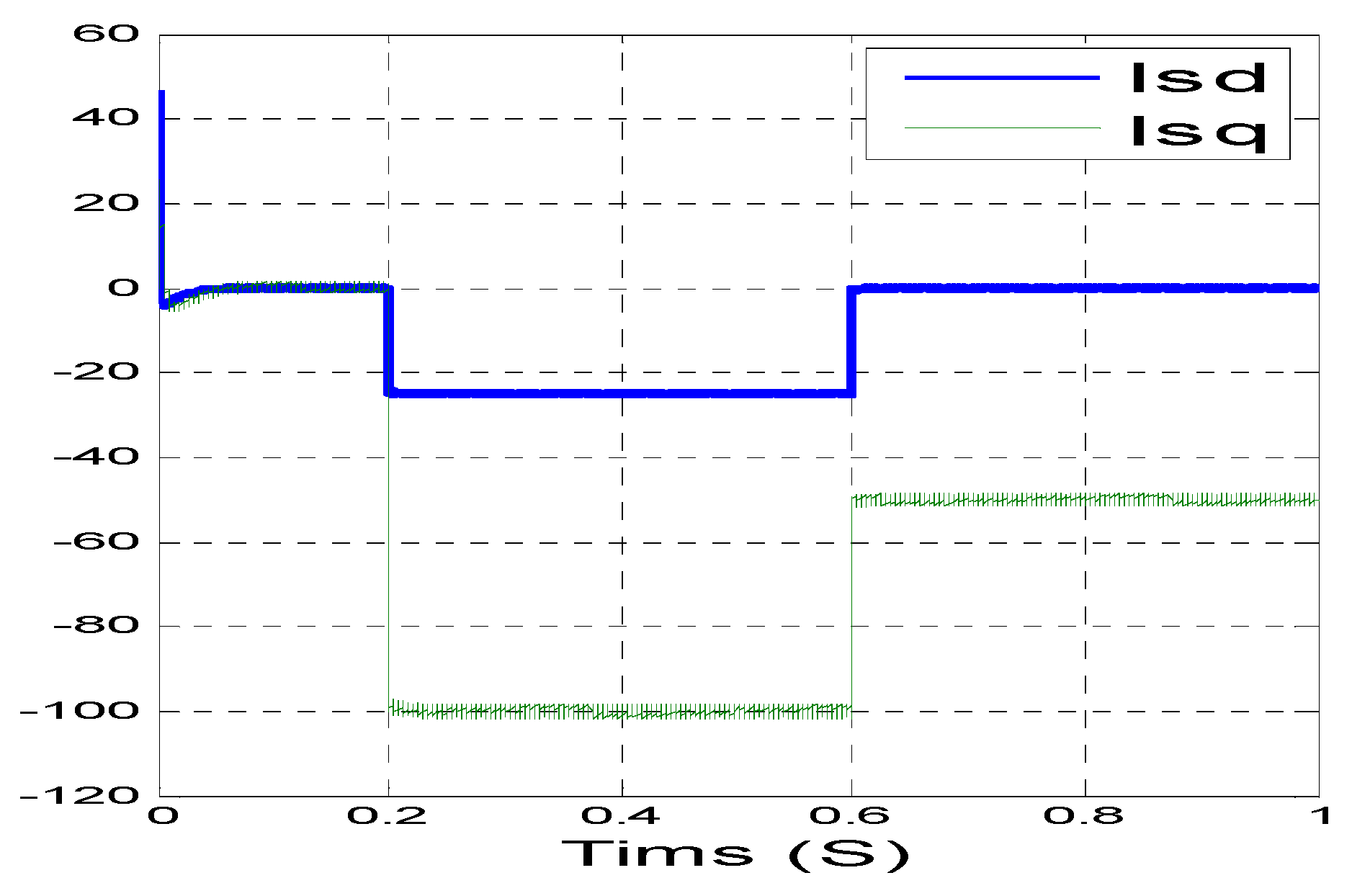
- The PI regulator maintains rotor currents at their respective references imposed by stator voltage regulation;
- -
- A reduction in the load induces a reduction in the rotor current;
- -
- The error in checking ird and irq is practically zero. The results obtained are illustrated in Figure 17. They show that the electromagnetic couple perfectly follows its benchmark with good dynamic performance, with less oscillation and overshoot.
- A genetic algorithm regulator: for the transient regime.
- A regulator (PI and Fuzzy logic controller): for the steady state.
- Response time.
- Precision.
- The error.
- Quality.
- Stability.
- Exceeding.
- Total Harmonic Distortion (THD).
- Sinusoidal.
13. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Value |
|---|---|---|
| Pn Vs. Fs Rs Ls Rr Lr M P J | Rated Power Stator Voltage Stator Frequency Stator Resistance Stator Leackage Inductance Rotor Resistance Rotor Leakage Inductance Mutual Inductance Pairs of poles number Rotor inertia | 1.5 MW 300 V 50 Hz 0.012 Ω 0.0205H 0.021Ω 0.0204H 0.0169H 2 1000 Kg·m2 |
| Symbol | Parameters | Value |
|---|---|---|
| R N G J fv V Vd Vm | Blade radius Number of blades Gearbox ratio Moment of inertia Viscous friction coefficient Nominal wind speed Cut-in wind speed Cut-out wind speed | 35.25m 3 90 1000 Kg·m2 0.0024 N·m·s−1 16 m/s 4 m/s 25 m/s |
| Nomenclature | |||
|---|---|---|---|
| Angle between the phase axis of the first stator winding and the rotor axis (rad) | Electromagnetic torque (N·m) | ||
| Angle between the axis of the first phase of the stator winding and the d axis (rad) | RSC | Rotor Side Converter | |
| Angle between the axis of the first phase of the rotor and the d axis (rad) | The reactive power at the reference stator (VAR) | ||
| Electric stator pulse (rad/s) | The active power at the reference stator (W) | ||
| G | Multiplier gain | The reactive power at the measured stator (VAR) | |
| Rotor feed frequency (Hz) | The active power at the measured stator (W) | ||
| PWM | Acronyme Pulse with modulation | Electromagnetic torque reference (N·m) | |
| Turbine blade pitch angle (rad) | Relative wind speed (m/s) | ||
| Slip | Area swept by the wind turbine rotor (m2) | ||
| Mechanical speed (rad/s) | Active line power (W) | ||
| Turbine radius (m) | Line reactive power (VAR) | ||
| DC bus voltage (V) | The turbine torque (N·m) | ||
| Optimal speed ratio (m/s) | Greek Symbols | ||
| Electric rotor pulsation (rad/s) | Air density at 15 °C (kg/m3) | ||
| Rotor current along the d axis, q (A) | Abbreviations | ||
| stator flux (Wb) | MPPT | Maximum Power Point Tracking | |
| Active stator power (W) | DFIG | Doubly-fed induction generator | |
| Reactive stator power (VAR) | LSC | Line side converter | |
| Turbine speed (rad/s) | PI | Proportional Integral | |
| Active rotor power (W) | ref | Index indicating the reference (the setpoint) | |
| Reactive rotor power (VAR) | DC/AC | Direct Current/Alternative Current | |
| Stator voltage vector (V) | THD | Total Harmonic Distortion | |
| POP | Population | GA | Genetic algorithm |
| Mu | Mutation | CCR | Convertisseur Coté Rotor |
| FC | Fuzzy Controller | ||
| FGA | Fuzzy Génétique Algorithms | ||
| CCS | Convertisseur Coté Stator | ||
| GSC | Grid Side Converter | ||
References
- Li, S.; Wang, H.; Tian, Y.; Aitouch, A.; Klein, J. Direct power control of DFIG wind turbine systems based on an intelligent proportional-integral sliding mode control. ISA Trans. 2016, 64, 431–439. [Google Scholar] [CrossRef]
- Hagh, M.T.; Roozbehani, S.; Najaty, F.; Tan, S.G.Y.; Muttaqi, K.M. Direct Power Control of DFIG based Wind Turbine based on Wind Speed Estimation and Particle Swarm Optimization. In Proceedings of the 2015 Australasian Universities Power Engineering Conference, Wollongong, Australia, 27–30 September 2015; pp. 1–6. [Google Scholar]
- Martinez, M.I.; Ana, S.; Tapia, G. Sliding Mode Control for DFIG Rotor and Grid Side Converters Under Unbalanced and Harmonically Distorted Grid Voltage. IEEE Trans. Energy Convers. 2012, 27, 328–339. [Google Scholar] [CrossRef]
- Benamor, A.; Benchouia, M.T.; Srairi, K.; Benbouzid, M.E.H. A novel rooted tree optimization apply in the high order sliding mode control using super-twisting algorithm based on DTC scheme for DFIG. Int. J. Electr. Power Energy Syst. 2019, 108, 293–302. [Google Scholar] [CrossRef]
- Benamor, A.; Benchouia, M.T.; Srairi, K.; Benbouzid, M.E.H. A new rooted tree optimization algorithm for indirect power control of wind turbine based on a doubly-fed induction generator. ISA Trans. 2019, 88, 296–306. [Google Scholar] [CrossRef]
- Tamaaarat, A.; Benakcha, A. Performance of PI controller for control of active and reactivepower in DFIG operating in a grid-connected variable speed wind energy conversion system. Front. Energy 2014, 8, 371–378. [Google Scholar] [CrossRef]
- Tareen, W.U.K.; Mekhielf, S. Three-phase transformerless shunt active power filter with reduced switch count for harmonic compensation in grid-connected applications. IEEE Trans. Power Electron. 2017, 33, 4868–4881. [Google Scholar] [CrossRef]
- Wu, L.; Liu, H.; Zhang, J.; Liu, C.; Sun, Y.; Li, Z.; Li, J. Identification of Control Parameters for Converters of Doubly Fed Wind Turbines Based on Hybrid Genetic Algorithm. Processes 2022, 10, 567. [Google Scholar] [CrossRef]
- Bekakra, Y.; Zellouma, L.; Malik, O. Improved predictive direct power control of shunt active power filter using GWO and ALO–Simulation and experimental study. Ain Shams Eng. J. 2021, 12, 3859–3877. [Google Scholar] [CrossRef]
- Alireza, F.; Masoum, M.A.S.; Moghbel, M. A new adaptive configuration of PIDtype fuzzy logic controller. ISA Trans. 2015, 56, 222–240. [Google Scholar]
- Benbouzid, M.; Beltran, B.; Amirat, Y.; Yao, G.; Han, J.; Mangel, H. Second-order sliding mode control for DFIG-based wind turbines fault ride-through capability enhancement. ISA Trans. 2014, 53, 827–833. [Google Scholar] [CrossRef] [Green Version]
- Zellouma, D.; Benbouhenni, H.; Bekakra, Y. Backstepping Control Based on a Third-order Sliding Mode Controller to Regulate the Torque and Flux of Asynchronous Motor Drive. Period. Polytech. Electr. Eng. Comput. Sci. 2022, 67, 10–20. [Google Scholar] [CrossRef]
- Shiravani, F.; Alkorta, P.; Cortajarena, J.A.; Barambones, O. An improved predictive current control for IM drives. Ain Shams Eng. J. 2022, 102037. [Google Scholar] [CrossRef]
- Fathy, A.; Alharbi, A.G.; Alshammari, S.; Hasanien, H.M. Archimedes optimization algorithm based maximum power point tracker for wind energy generation system. Ain Shams Eng. J. 2022, 13, 101548. [Google Scholar] [CrossRef]
- Pan, I.; Das, S.; Gupta, A. Tuning of an optimal fuzzy PID controller with stochasticalgorithms or networked control systems with random time delay. ISA Trans. 2011, 50, 28–36. [Google Scholar] [CrossRef] [PubMed]
- Kanjiya, P.; Khadkikar, V.; Zeineldin, H.H. Optimal control of shunt active power filter to meet IEEE Std. 519 current harmonic constraints under nonideal supply condition. IEEE Trans. Ind. Electron. 2014, 62, 724–734. [Google Scholar] [CrossRef]
- Pan, L.; Zhu, Z.; Xiong, Y.; Shao, J. Integral sliding mode control for maximum power point tracking in DFIG based floating offshore wind turbine and power to gas. Processes 2021, 9, 1016. [Google Scholar] [CrossRef]
- Jerin AR, A.; Kaliannan, P.; Subramaniam, U. Improved fault ride through capability of DFIG based wind turbines using synchronous reference frame control based dynamic voltagerestorer. ISA Trans. 2017, 70, 465–474. [Google Scholar] [CrossRef]
- Abdelkarim, A.; Youcef, B.; Zellouma, L.; Toumi, D.; Ibrahim, A.; Aboelsaud, R. Improved space vector modulation algorithm of 5-level three-phase z-source based cascaded inverter. Int. J. Power Electron. Drive Syst. 2022, 13, 2286–2295. [Google Scholar] [CrossRef]
- Zeghdi, Z.; Barazane, L.; Bekakra, Y.; Larabi, A. Improved backstepping control of a DFIG based wind energy conversion system using ant lion optimizer algorithm. Period. Polytech. Electr. Eng. Comput. Sci. 2022, 66, 43–59. [Google Scholar] [CrossRef]
- Nazir, M.S.; Wu, Q.; Li, M.; Zhang, L. Symmetrical Short Circuit Parameter Differences of Double Fed Induction Generator and Synchronous Generator Based Wind Turbine. Indones. J. Electr. Eng. Comput. Sci. (IJEECS) 2017, 6, 268–277. [Google Scholar] [CrossRef] [Green Version]
- Yaichi, I.; Semmah, A.; Wira, P. Control of Doubly Fed Induction Generator with Maximum Power Point Tracking for Variable Speed Wind Energy Conversion Systems. Period. Polytech. Electr. Eng. Comput. Sci. 2020, 64, 87–96. [Google Scholar] [CrossRef]
- Aroussi, H.A.; Ziani, E.; Bouderbala, M.; Bossoufi, B. Improvement of direct torque control applied to doubly fed induction motor under variable speed. Int. J. Power Electron. Drive Syst. (IJPEDS) 2020, 11, 97–106. [Google Scholar] [CrossRef] [Green Version]
- Delima, A.J.P. An experimental comparison of hybrid modified genetic algorithm-based prediction models. Int. J. Recent Technol. Eng. 2019, 8, 1756–1760. [Google Scholar]
- Guediri, A.K.; Ben Attous, D. Modeling and fuzzy control of a wind energy system based on double-fed asynchronous machine for supply of power to the electrical network. Int. J. Syst. Assur. Eng. Manag. 2017, 8, 353–360. [Google Scholar] [CrossRef]
- Orong, M.Y.; Sison, A.M.; Medina, R.P. A hybrid prediction model integrating a modified genetic algorithm to K-means segmentation and C 4.5. In Proceedings of the TENCON 2018—2018 IEEE Region 10 Conference, Jeju Island, Republic of Korea, 28–31 October 2018; pp. 1853–1858. [Google Scholar]
- Sayed, S.; Nassef, M.; Badr, A.; Farag, I. A Nested Genetic Algorithm for feature selection in high-dimensional cancer Microarray datasets. Expert Syst. Appl. 2019, 121, 233–243. [Google Scholar] [CrossRef]
- Hamid, C.; Derouich, A.; Taoussi, M.; Zamzoum, O.; Hanafi, A. An Improved Performance Variable Speed Wind Turbine Driving a Doubly Fed Induction Generator Using Sliding Mode Strategy. In Proceedings of the 2020 IEEE 2nd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 2–3 December 2020. [Google Scholar]
- Belkhiri, H.; Messai, A.; Belaoued, M.; Haider, F. Security in the internet of things: Recent challenges and solutions. In Proceedings of the International Conference on Electrical Engineering and Control Applications, Kuantan, Pahang, Malaysia, 29 July 2019; Springer: Singapore, 2019. [Google Scholar]
- Trong, T.N.; Tien, B.N.; Thanh, H.N.; Hoang, H.N. The controller of DFIG power fed into the grid basing on the rotor similar signal method. Appl. Mech. Mater. 2013, 415, 245–249. [Google Scholar] [CrossRef]
- Huang, H.-H.; Liang, Y. An integrative analysis system of gene expression using self-paced learning and SCAD-Net. Expert Syst. Appl. 2019, 135, 102–112. [Google Scholar] [CrossRef]
- Kharoubi, S.; El Menzhi, L. Wind turbine doubly-fed induction generator defects diagnosis using rotor currents lissajous curves. Int. J. Power Electron. Drive Syst. 2020, 11, 2083. [Google Scholar] [CrossRef]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV system fuzzy logic MPPT method and PI control as a charge controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Naick, K.; Chatterjee, K.; Chatterjee, T. Fuzzy logic controller based maximum power point tracking technique for different configurations of partially shaded photovoltaic system. Arch. Electr. Eng. 2018, 67, 307–320. [Google Scholar]
- Belaimeche, F.Z.; Bentaallah, A.; Massoum, S.; Wira, P. A comparative study between a simplified fuzzy PI and classic PI input-output linearizing controller for the wind-turbine doubly fed induction generator. Elektrotehniški Vestn. 2018, 85, 142–148. [Google Scholar]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M.E.H. Mode Power Control of Variable Speed Wind Energy Conversion Systems. IEEE Trans. Energy Convers. 2015, 23, 551–558. [Google Scholar] [CrossRef] [Green Version]
- Ebrahim, M.A. Towards Robust Non-Fragile Control in Wind Energy Engineering. Indones. J. Electr. Eng. Comput. Sci. (IJEECS) 2017, 7, 29–42. [Google Scholar] [CrossRef]
- Pei, X.; Zhou, Y.; Wang, N. A Gaussian process regression based on variable parameters fuzzy dominance genetic algorithm for B-TFPMM torque estimation. Neurocomputing 2019, 335, 153–169. [Google Scholar] [CrossRef]
- Delima, A.J.P.; Sison, A.M.; Medina, R.P. A Modified Genetic Algorithm with a New Crossover Mating Scheme. Indones. J. Electr. Eng. Inform. 2019, 7, 165–181. [Google Scholar]
- Gacem, A.; Benattous, D. Hybrid genetic algorithm and particle swarm for optimal power flow with non-smooth fuel cost functions. Int. J. Syst. Assur. Eng. Manag. 2017, 8, 146–153. [Google Scholar] [CrossRef]
- Belgaid, Y.; Helaimi, M.; Taleb, R.; Youcef, M.B. Optimal tuning of PI controller using genetic algorithm for wind turbine application. Indones. J. Electr. Eng. Comput. Sci. 2020, 18, 167–178. [Google Scholar] [CrossRef]























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guediri, A.; Hettiri, M.; Guediri, A. Modeling of a Wind Power System Using the Genetic Algorithm Based on a Doubly Fed Induction Generator for the Supply of Power to the Electrical Grid. Processes 2023, 11, 952. https://doi.org/10.3390/pr11030952
Guediri A, Hettiri M, Guediri A. Modeling of a Wind Power System Using the Genetic Algorithm Based on a Doubly Fed Induction Generator for the Supply of Power to the Electrical Grid. Processes. 2023; 11(3):952. https://doi.org/10.3390/pr11030952
Chicago/Turabian StyleGuediri, Abdelkarim, Messaoud Hettiri, and Abdelhafid Guediri. 2023. "Modeling of a Wind Power System Using the Genetic Algorithm Based on a Doubly Fed Induction Generator for the Supply of Power to the Electrical Grid" Processes 11, no. 3: 952. https://doi.org/10.3390/pr11030952
APA StyleGuediri, A., Hettiri, M., & Guediri, A. (2023). Modeling of a Wind Power System Using the Genetic Algorithm Based on a Doubly Fed Induction Generator for the Supply of Power to the Electrical Grid. Processes, 11(3), 952. https://doi.org/10.3390/pr11030952