1. Introduction
Energy is the foundation and driving force for the progress of human civilization. The national economy, people’s livelihoods, and national security are crucial for improving people’s well-being and promoting economic and social development [
1]. However, in recent years, the demand for energy in human society has increased, and the energy problem has attracted the attention of people around the world. Although the use of energy has promoted economic growth in all countries, it also poses great challenges to mankind [
2]. At present, there is very little research on the technology of energy transformation. Although the use of renewable energy can alleviate the energy crisis, its infrastructure construction is not advanced enough, which still causes China to experience large-scale power rationing [
3]. In addition, human misuse of energy resources leads to an insufficient sustainable energy supply, resource shortage, ecological pollution, and other problems that seriously affect human survival and development [
4]. A photovoltaic power generation servo system can track the position of the sun and adjust the position of the photovoltaic panel in real time, achieving maximum power generation efficiency by shining sunlight at an appropriate angle onto the photovoltaic panel. Servo motors can convert voltage signals into torque and speed to drive control objects, accurately controlling the position of the motor, and they are widely used in various fields. However, photovoltaic power generation servo control systems have many unknown parameters and complex controls, making it difficult to achieve precise tracking control. Therefore, how to improve the daily tracking progress of photovoltaic power generation systems is a widely concerning issue for many scholars. Dynamic surface (DS) control technology was developed based on backstepping technology, which overcomes the computational complexity of the traditional backstepping design and makes the controller and parameter design simpler. This technology can effectively reduce the number of input variables for neural networks and fuzzy systems used for modeling [
5]. However, the research on DS technology in nonlinear control systems is mostly based on continuous-time systems, and there is less research on adaptive DS control technology based on discrete-time nonlinear control systems. The digital correction effect used in a discrete-time system is better than that in a continuous correction device. Its software is more convenient for the realization of control law modification, flexible control, and a more accurate description of the actual production process [
6]. In addition, the information transmission in discrete-time control (DTC) systems can effectively suppress interference and have better stability [
7]. In order to solve the problem of two-axis tracking in a photovoltaic power generation system and using adaptive DS technology based on a discrete-time system, a discrete adaptive neural network dynamic surface (DANNDS) controller was designed. Then, based on this DANNDS controller, a photovoltaic power generation servo system based on a discrete adaptive neural network quantization controller (DANNQC) was established in this research.
This research aims to improve the tracking efficiency of solar power generation systems and better develop new energy power generation so as to make it correspond to the goal of carbon neutrality and carbon peak shaving. In addition, the application fields for DS control technology are very extensive, and currently, there are related applications in power systems, aircraft control, and the shipbuilding industry. The research on DS control technology can further promote its development. Finally, most of the research on DS control technology in nonlinear control systems is based on continuous-time systems. The adaptive DS control of discrete-time nonlinear control systems proposed in this study can provide more accurate descriptions of actual control systems in the production process and can effectively suppress drying. Its stability and safety are extremely high, which can increase the development of nonlinear control fields and have important practical significance. The innovation points of this research are as follows: the first point is to propose an adaptive dynamic surface control scheme based on discrete systems, and the second point is to design an adaptive neural network tracking control scheme with state quantization considering the uncertainty of system parameters and external disturbances.
2. Related Work
A photovoltaic power generation servo system realizes the tracking control of a solar track by simultaneously controlling the height angle motor and the azimuth angle motor. The two servo systems in the system are the same and independent of each other [
8]. Servo motor control has important practical significance for improving the control and tracking accuracy of photovoltaic power generation servo systems and ensuring the safe and stable operation of power systems [
9]. However, a photovoltaic power generation servo control system has many unknown parameters, and the control is complex. It is difficult to achieve accurate tracking control. Therefore, many scholars have conducted in-depth discussions about photovoltaic power generation systems and improving the sun-seeking accuracy of photovoltaic power generation systems. In order to improve the power quality of a three-phase power system, Panigrahi et al. designed a model using a multi-level inverter to optimize a photovoltaic microgrid to improve the power quality. The research showed that the model was helpful for managing reactive power by controlling the direct current (DC) bus voltage through the photovoltaic system, and it also helped to reduce harmonics and provide additional active power to the load in case of electrical interference on the grid side [
10]. Mathivanan proposed using an appropriate controller in a solar photovoltaic flywheel energy storage system for new energy storage and power regulation. The flywheel is responsible for the dynamic stability of the system, and the reliability of the system is guaranteed with a good controller unit. The solar photovoltaic power generation device and its controller were simulated and tested using MATLAB software, and the results verified the performance of the system [
11]. To achieve reliable power system dispatching, Mei et al. built a set of non-parametric probability prediction models for photovoltaic power generation. The quantile regression average was used to integrate a group of independent long-term and short-term deterministic prediction models to obtain the probability prediction of the PV output. Experimental data verified the effectiveness of the model. Compared with the benchmark method, the proposed method has better prediction performance [
12]. Shi et al. designed a high-gain soft-switching boost CLLC converter with PWM and pulse frequency modulation hybrid modulation control for photovoltaic power generation in order to maximize the energy generated with the photovoltaic power generation system and improve the conversion efficiency. They verified the efficiency of the converter and the feasibility of this method through experiments [
13].
A solar tracking system is widely used in solar photovoltaic applications. It is an electrical device that allows a solar panel to always face the sun so that the sunlight always shines in a vertical direction on the solar panel. However, the tracker in solar tracking systems has a shorter lifespan and lower reliability, so many scholars have conducted in-depth discussions. Umer et al. proposed an extended TOPSIS technology based on interval type-II Pythagorean fuzzy numbers for the efficient utilization of solar energy and applied this technology to solar tracking systems. The experimental results showed that the performance of the solar tracking system applied to TOPSIS technology was superior [
14]. Saeedi M. et al. designed a double-axis solar tracker based on a Wheatstone bridge circuit and LDR sensor to improve the output power of photovoltaic panels. The simulation results confirmed that the output power of the photovoltaic panel using a biaxial solar tracker was higher than that of the fixed panel [
15]. Anuraj et al. discussed the design of a solar tracking system using a stepper motor based on LDR sensors and an ATMaga16 microcontroller to reduce the initial cost of establishing a solar tracking system. The research results indicated that the system achieved precise automatic tracking of the sun [
16]. Fb et al. selected phase change materials, thermoelectric materials, and aluminum fins to cool the photovoltaic panels of solar tracking systems using different cooling methods, and they compared the surface temperatures and output powers of the photovoltaic panels. Simulation experiments demonstrated that under the same environmental conditions, using aluminum fins as the cooling method for the photovoltaic panels of the solar tracking system could effectively reduce the surface temperature of the panels and increase the output power [
17]. Bashar designed a solar dual tracking system with intelligent power and tracking performance data monitoring to improve the efficiency of photovoltaic panels. Through the test results of the system at different time periods, it is known that the dual tracking system has good feasibility [
18]. Abir Muntacir et al. constructed a self-powered dual-axis tracking system for solar panels based on Arduino controllers to address the growing demand for electricity. The system always maintains the alignment of solar panels with the sun for energy regeneration. When the light intensity decreases due to changes in the position of the sun, the system automatically changes direction to achieve the maximum light intensity. Simulation experiments have proven that this system can improve the utilization efficiency of photovoltaic panels or any solar energy device [
19].
To sum up, there are many research results about photovoltaic power generation systems and nonlinear control technology, but there is relatively little research on adaptive DS control based on a discrete-time nonlinear control system. For solving the efficiency problem of photovoltaic power generation systems and how to combine DS technology with photovoltaic power generation systems, a DANNDS controller and a photovoltaic power generation servo system based on a DANNQC were proposed.
4. Performance Analysis of Photovoltaic Power Generation Servo System Based on DANNQC
To verify the effectiveness and performance of the proposed DANNDS controller and the photovoltaic power generation servo system based on the DANNQC, a stability analysis of the DANNDS controller and the DANNQC was carried out. The stability analysis of the DANNDS controller shows that when , , and when , . The stability analysis of the DANNQC shows that when and , . The research parameters were set as follows: the reference signals were and . The parameters of the virtual control law and the final control law were , , , , and . The time constant of the low-pass filter was . The parameters of the parameter regulation law were and , . The experimental platform was the Modeling Tech real-time simulation experimental platform for power electronics. The height angle motor and azimuth angle motor parameters of the photovoltaic power generation servo system were as follows. The stator resistance was 0.34 Ω, the rotor resistance was 0.195 Ω, the magnetic linkage was 0.9378 Wb, the number of pole pairs was 1, the stator inductance was 0.1078 H, the rotor inductance was 0.1077 H, and the mutual inductance was 0.1042 H.
To more scientifically verify the effectiveness of the proposed DANNDS control method, comparative experiments were conducted using the commonly used control methods in the literature [
26,
27], and the tracking error results were obtained, as shown in
Table 1. In
Table 1, G represents the height angle servo motor, and F represents the azimuth angle servo motor. In
Table 1, compared with the control methods in the literature [
26,
27], the proposed DANNDS control method has lower scores for G and F for the MTE, RMSTE, and 2NTE indicators, with values of 0.0026, 7.0279 × 10
−4, 0.3552, 0.0028, 8.9237 × 10
−4, and 0.4511, respectively. This indicates that the steady-state performance of the DANNDS control method is better. For G and F, the control method designed in the literature [
26] has scores of 0.0123, 0.0072, 3.6400, 0.0128, 0.0068, and 3.4539 for the MTE, RMSTE, and 2NTE, respectively. For G and F, the control method designed in the literature [
27] has scores of 0.0137, 0.0069, and 3.8241 for the MTE, RMSTE, and 2NTE, respectively, compared with 0.0139, 0.0062, and 3.7967.
Figure 5 shows the height angle tracking performance and tracking error results for the three control methods. In
Figure 5a, as the step size increases, the height angle tracking performance of the three control methods shows a periodic change curve. The DANNDS control method almost coincides with the change in the reference signal. The curve of the control inverse method designed in the literature [
26] changes significantly with the reference curve, and the difference between the control method proposed in the literature [
27] and the change in the reference curve is the largest. This indicates that the proposed DANNDS control method has the best performance in terms of height angle tracking and can achieve precise tracking with changes in sunlight. In
Figure 5b, as the step size increases, there is no significant fluctuation in the tracking error for the DANNDS control method, and the tracking error is stable at [−0.003,0.003]. The tracking error of the control method proposed in the literature [
26] fluctuates significantly and exhibits periodic fluctuations within [−0.013,0.013]. The tracking error of the control method designed in the literature [
27] is the largest, with fluctuations within [−0.1,0.1]. This indicates that the tracking performance of the DANNDS control method proposed in this study is superior to that of the mainstream control methods for current Taiyang tracking systems.
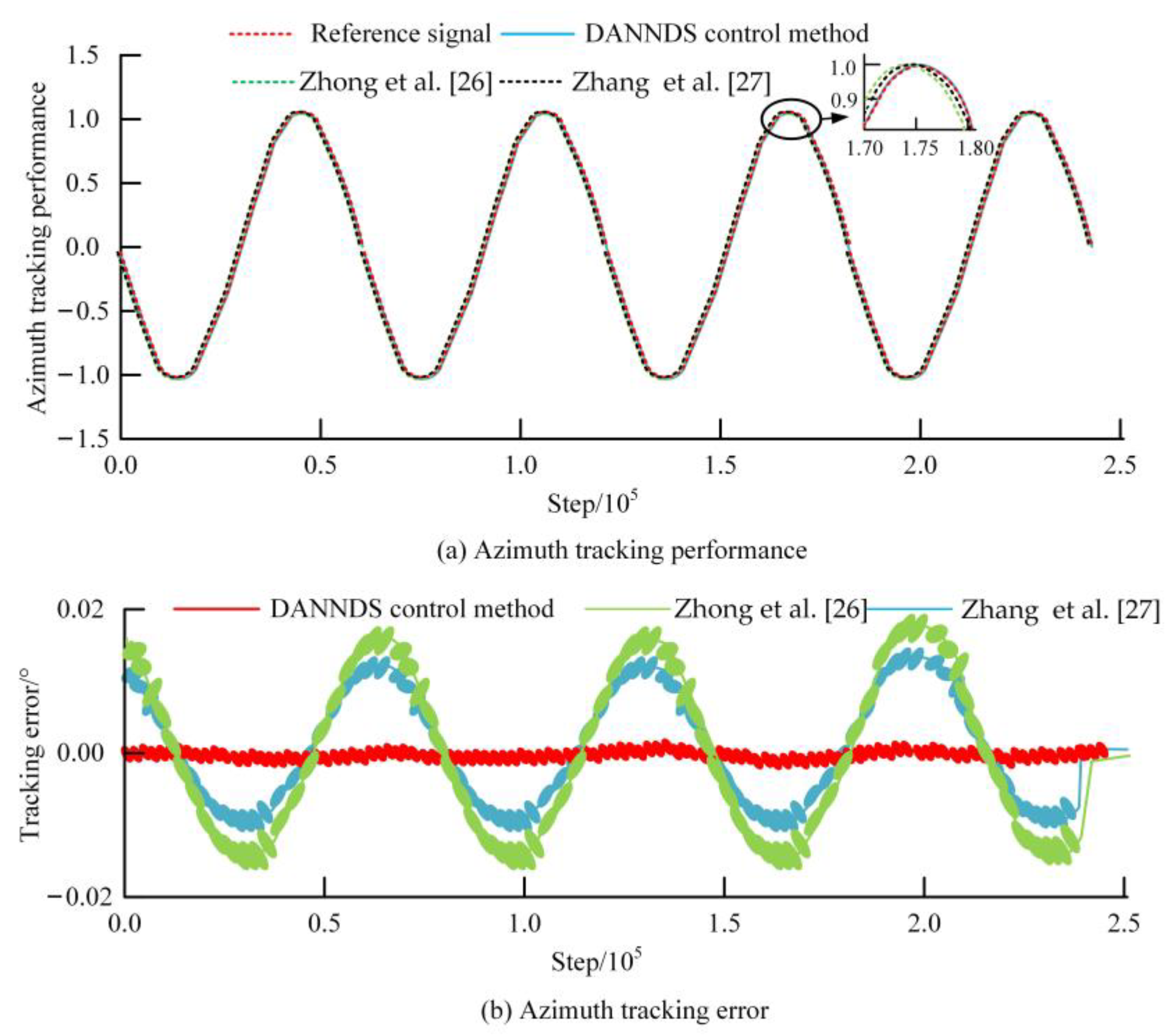
Figure 6 shows the azimuth tracking performance and tracking error results of the three control methods.
Figure 6a shows the variation curves of the azimuth tracking performance of the three control methods. As the step size increases, the tracking performance of the three methods shows periodic variation curves, and the DANNDS control method is more in line with the change in the reference signal. The variation curves of the other two control methods have a certain gap with the curve of the reference signal. This indicates that the proposed method can more efficiently track changes in solar light. According to
Figure 6b, as the step size increases, the tracking error of the DANNDS control method changes slightly, ranging within [−0.003,0.003]. The tracking error curve of the control method proposed in the literature [
26] shows periodic fluctuations with a large amplitude. The control method designed in the literature [
27] has the maximum tracking error, with a range of variations within [−0.17,0.017]. In summary, the tracking effect and performance of the DANNDS control method are superior to those of the other two mainstream control methods.
Figure 7 shows the variation curves of the height angle quantization control signals for the two quantization methods, wherein random interference signals were introduced at steps 0.4 × 105 and 1.7 × 105. The variation curves of the two methods exhibit the same periodic variation, with logarithmic quantization within the range of [−20,20] and more frequent fluctuations. The hysteresis quantification method proposed in this study varies with step size within the range of [−8,8], and the fluctuations are smoother. At the two points where the random interference signals were introduced, the proposed hysteresis quantizer can better alleviate the adverse effects caused by the introduction of random interference.
Figure 8 shows the comparison of the azimuth quantization control signals of the two quantization methods. Both quantization methods exhibit similar periodic trends, and the fluctuation range of the logarithmic quantization change curve is [−20,20], with corresponding changes fluctuating more frequently. The fluctuation range for the change curve of the hysteresis quantification method is [−19,19], and the corresponding change fluctuation is relatively flat. To sum up, the proposed hysteresis quantizer can effectively suppress the chattering phenomenon of the controller, and its performance is better than that of the logarithmic quantizer.
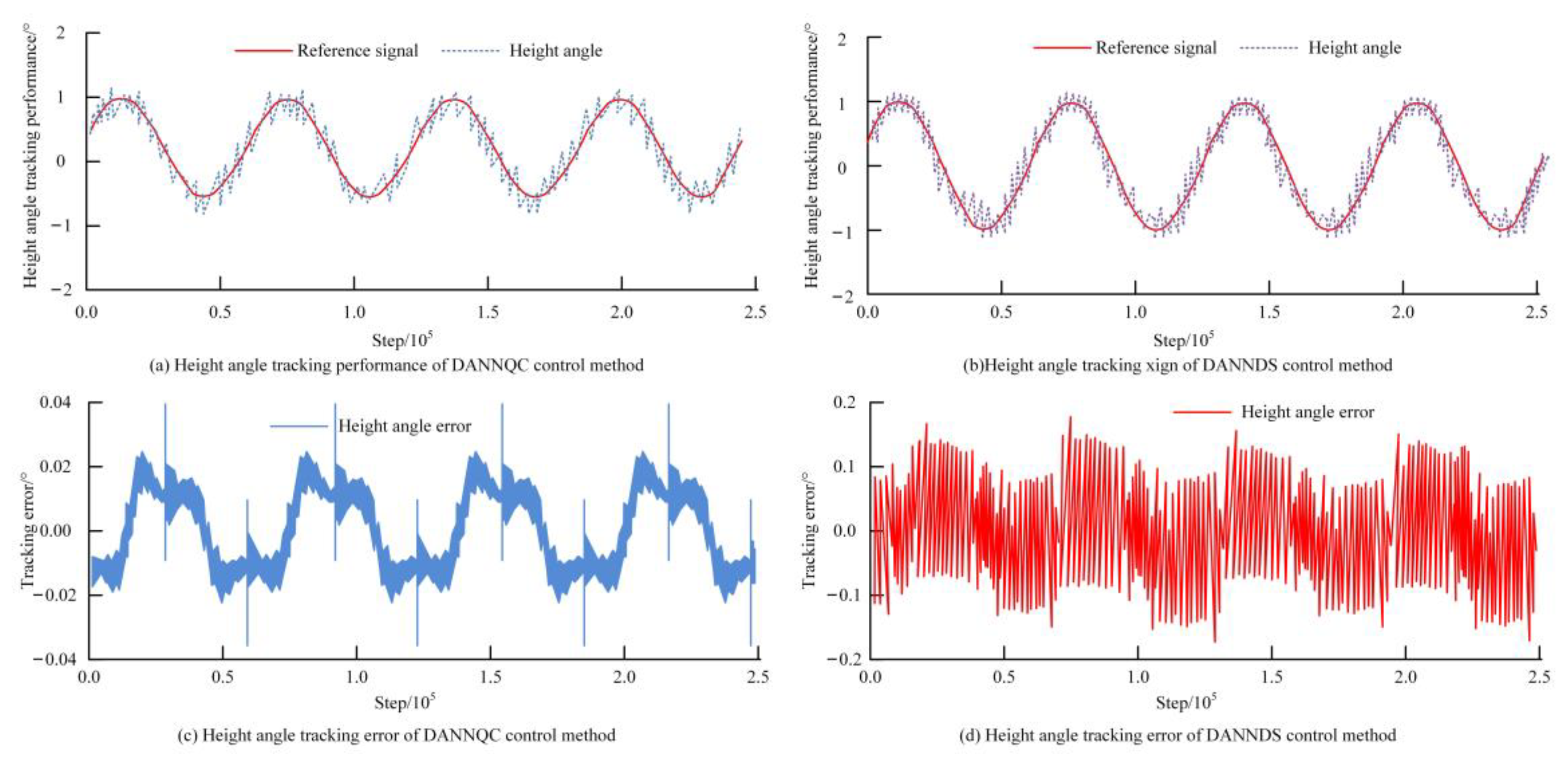
In order to verify the control effect of the DANNQC control method of the photovoltaic power generation servo system, this research carried out experiments on the test platform to obtain the results of the height angle tracking performance and tracking error, as shown in
Figure 9.
Figure 9a shows the height angle tracking performance change curve of the DANNQC control method, which is very close to the change curve of the reference signal, and the change range is [−1.1,1.1].
Figure 9b shows the height angle tracking performance change curve of the DANNDS control method, which fluctuates more frequently, and the corresponding change range is [−1.2,1.1].
Figure 9c shows the height angle tracking error change curve of the DANNQC control method, which changes periodically on the whole, within the range of [−0.02,0.022].
Figure 9d shows the height angle tracking error change curve of the DANNDS control method, which fluctuates very frequently, and the fluctuation range is [−0.2,0.2].
Figure 10 shows the azimuth tracking performance and tracking error change curve for the DANNQC control method.
Figure 10a shows the azimuth tracking performance change curve for the DANNQC control method, which fits well with the reference signal, and the change range is [−1.2,1.1].
Figure 10b shows the azimuth tracking performance change curve for the DANNDS control method, within the range of [−1.2,1.2]. As can be observed in
Figure 10c, as the step size increases, the azimuth tracking error for the DANNQC control method presents periodic changes, and the range of these changes is [−0.03,0.03].
Figure 10d shows the azimuth tracking error for the DANNDS control method, which fluctuates frequently and varies in the range of [−1.8,1.8]. In conclusion, the control performance of the DANNQC control method is superior.
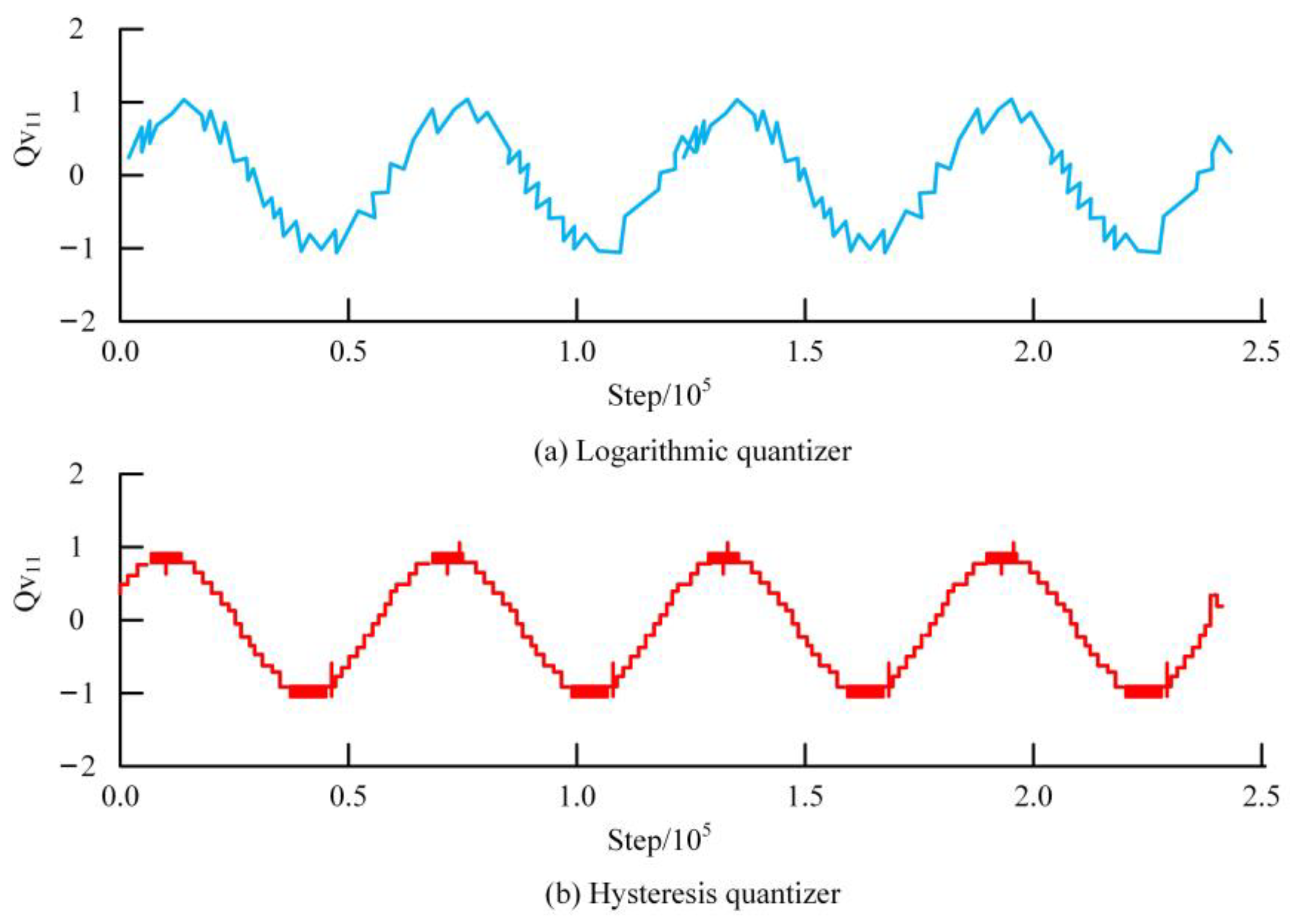
Figure 11 shows the comparison between the hysteresis quantization curve and the logarithmic quantization curve of the output of the photovoltaic power generation servo system based on the DANNQC.
Figure 11a shows the quantization effect of the logarithmic quantizer, which fluctuates more frequently.
Figure 11b shows the quantization effect of the hysteresis quantizer, which fluctuates more regularly and has a small fluctuation. To sum up, the influence of the quantization effect on the control performance of the photovoltaic power generation servo system is based on the DANNQC.
5. Conclusions
As the energy problem has become increasingly serious in recent years, to achieve the sustainable use of resources, countries around the world are committed to researching new energy. Photovoltaic power generation is an important direction in the development of new energy, but it has shortcomings such as low power generation efficiency. To improve the efficiency of photovoltaic power generation, a DANNDS controller was proposed, and then a DANNQC photovoltaic power generation servo system was constructed based on the DANNDS controller. The experimental results demonstrate the MTE, RMSTE, and 2NTE scores of the height angle servo motor of the DANNDS control method, which were 0.0026, 7.0279 × 10−4, and 0.3552, respectively. The scores for the various indicators of the azimuth servo motor were 0.3552, 0.0028, 8.9237 × 10−4, and 0.4511, respectively, which are lower than the scores of the other two mainstream control methods. In the height angle tracking error variation curves, the variation range for the DANNQC control method was [−0.02,0.022]. The fluctuation range for the DANNDS control method was [−0.2,0.2]. In the azimuth tracking error variation curves, the variation range for the DANNQC control method was [−0.03,0.03]. The range for the DANNDS control method was [−1.8,1.8]. To sum up, the DANNDS controller proposed in this study has good steady-state performance, and the photovoltaic power generation servo system based on the DANNQC has better control performance. However, there are still shortcomings in this research. The control schemes proposed in this study are all based on a single photovoltaic power generation servo system. In future research, the collaborative control of multiple photovoltaic power generation servo systems can be studied.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}