
Simulation of Plastic Deformation Failure of Tillage Tools Based on the Smoothed Particle Hydrodynamics Method

Abstract
:1. Introduction
2. Simulation Approaches
2.1. The Basics of SPH Method
2.1.1. Kernel Function Approximation
2.1.2. Particle Approximation
2.2. Discretization of Governing Equations
2.3. Constitutive Model of the Soil
2.4. Constitutive Model of the Cutting Tool
2.4.1. Equation of State
2.4.2. von Mises Yield Criterion
2.4.3. Johnson–Cook Constitutive Model
2.5. Tool–Soil Interaction Model
2.6. Model Implementation Process
3. Numerical Example and Result Analysis
3.1. Model Construction and Parameter Setting
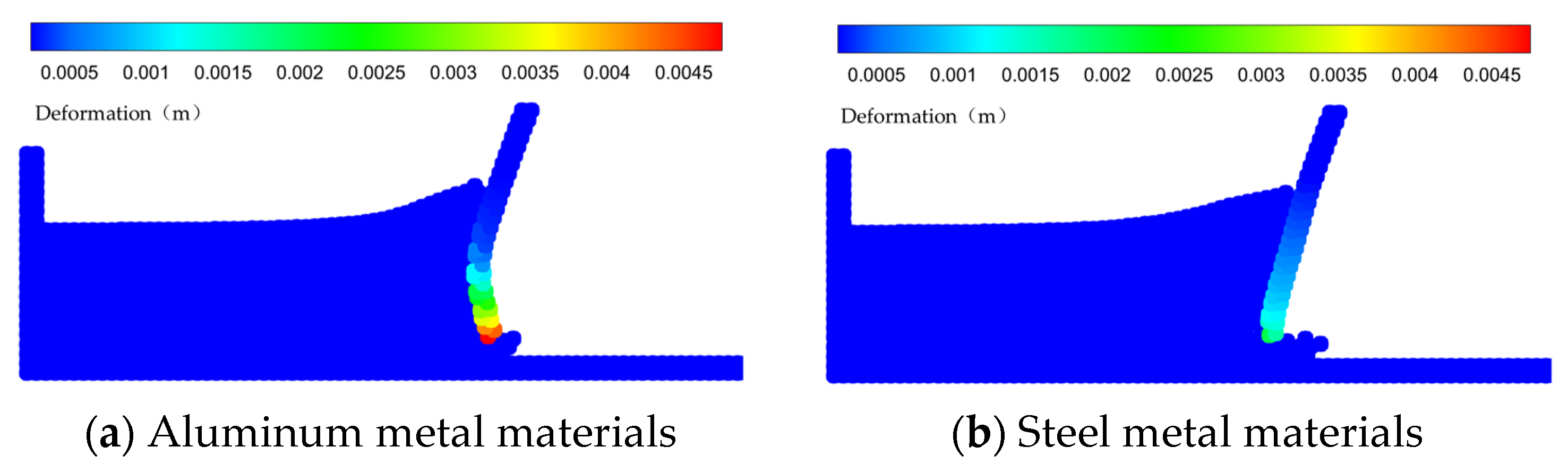
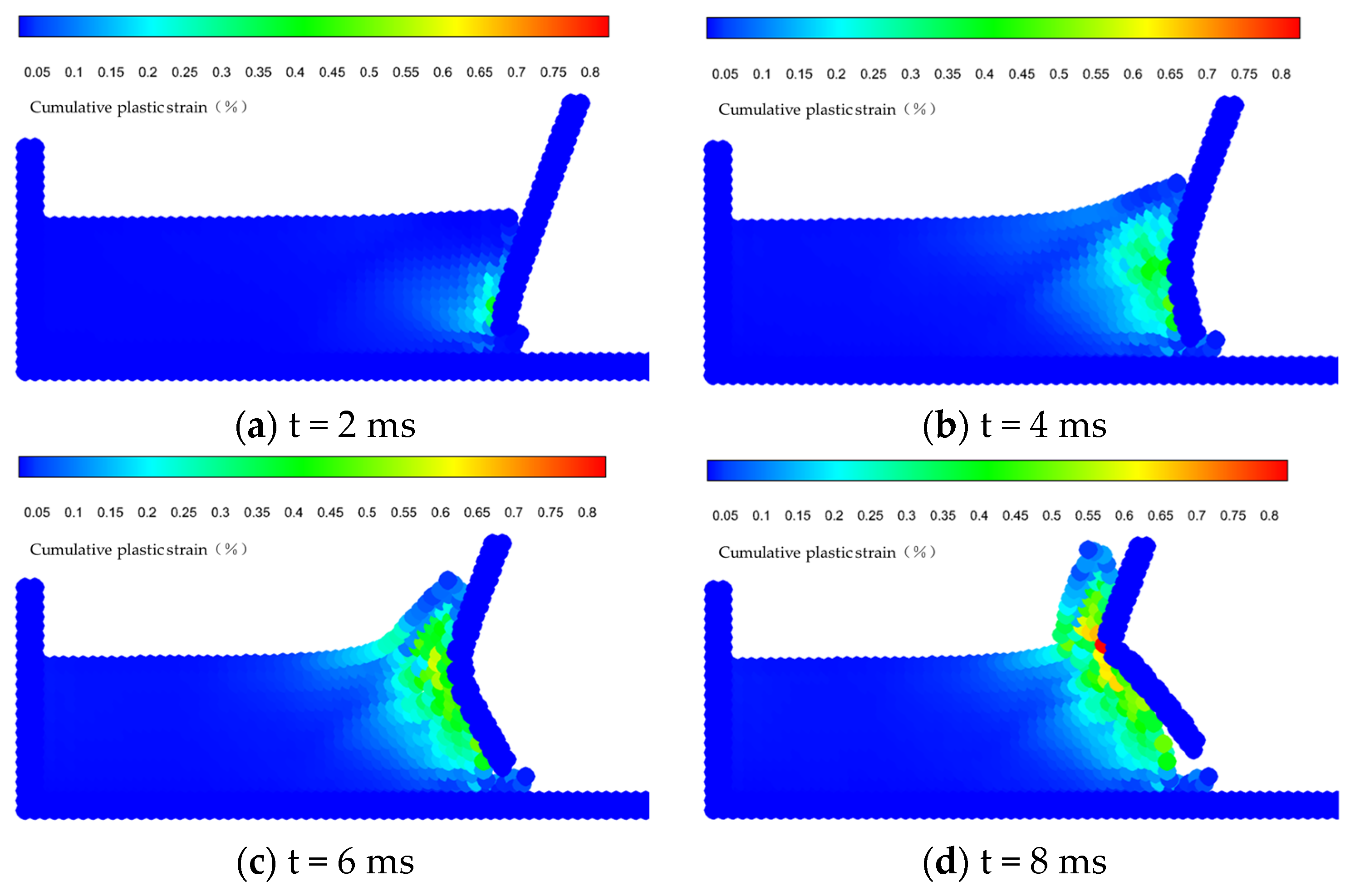
3.2. Process of Tool Deformation and Fracture
3.3. Distribution of Soil Displacement
3.4. Velocity Vector Analysis
3.5. Cutting Force Analysis
4. Conclusions
- (1)
- The model combines an elastoplastic constitutive model and the Johnson–Cook damage criterion, incorporating Lennard-Jones repulsive forces for the soil–tool interface coupling. Numerical techniques including the artificial stress terms and Jaumann rate correction handle the challenges of cohesive soil, stress fluctuations, and large deformations. This enables simulation of the complete progressive failure sequence from initial loading to final fracture.
- (2)
- Simulations reveal the detailed post-fracture displacement fields in the soil, highlighting the non-uniform distributions. Velocity vector plots visualize and accurately reflect the motion of the tool and soil particles. The coupled force–deformation tool response provides insights into the relationships between cutting forces and accumulating tool damage. This fundamental understanding facilitates the optimization of tool structural design for enhanced fracture resistance.
- (3)
- Overall, the model accurately characterizes the complex soil–tool interactions involving substantial stresses and deformations. This technique could be extended to simulate progressive damage in other earthmoving equipment components, providing a versatile simulation platform.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| problem domain | |
| Dirac function | |
| smoothing kernel function | |
| h | smooth length |
| particle volume | |
| m | particle mass |
| coordinate position | |
| v | velocity |
| e | internal energy |
| stress tensor | |
| Cartesian components | |
| P | pressure |
| density | |
| dynamic viscosity coefficient | |
| N | total number of particles within the support domain |
| artificial stress term | |
| artificial viscosity term | |
| strain rate tensor | |
| rotation rate tensor | |
| plastic multiplier | |
| deviatoric shear stress | |
| Gruneisen’s constant | |
| linear Hugoniot slope coefficient | |
| G | shear modulus |
| yield stress | |
| second stress tensor invariant | |
| equivalent plastic strain | |
| increment of equivalent plastic strain | |
| equivalent plastic strain rate | |
| A, B, C, N, and M | J–C plasticity model constants |
| normalized temperature | |
| reference temperature | |
| melting temperature | |
| failure strain | |
| c | cohesive force |
| friction angle | |
| K | bulk modulus |
| Poisson’s ratio | |
| specific heat | |
| Abbreviations | |
| SPH | smoothed particle hydrodynamics |
| FEM | finite element method |
| DEM | discrete element method |
| D-P | Drucker–Prager yield criterion |
| J-C | Johnson–Cook constitutive model |
References
- Li, H.; Hao, J.; Zhao, J.; Ma, Y.; Li, J. The status and enlightenment of research on soil abrasion mechanism of soil—Engaging components of agricultural machinery abroad. J. Agric. Mech. Res. 2022, 44, 1–6. [Google Scholar] [CrossRef]
- Zhou, B.; Tian, G.; Shu, L.; Lan, X. Analysis on the weak points of the development of agricultural mechanization in Chongqing. Farm Mach. 2022, 65–68+71. [Google Scholar] [CrossRef]
- Su, B.; Xu, Y.; Jian, J. The actuality of development and research of wear resistant part for agricultural mechinery. Heat Treat. Technol. Equip. 2013, 34, 53–58. [Google Scholar] [CrossRef]
- Zhong, J.; Ren, S.; Wu, M. Numerical simulation of rotary tillage and soil cutting based on smooth particle hydrodynamics. J. Hunan Agric. Univ. (Nat. Sci.) 2022, 48, 744–748. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Ma, S.; Ge, J. Simulation of vertical trenching process based on SPH algorithm. Jiangsu Agric. Sci. 2018, 46, 225–228. [Google Scholar] [CrossRef]
- Lu, C.; He, J.; Li, H.; Wang, Q.; Zheng, Z.; Zhang, X. Simulation of soil cutting process by plane blade based on SPH method. Trans. Chin. Soc. Agric. Mach. 2014, 45, 134–139. [Google Scholar] [CrossRef]
- Gao, T.; Xie, S.; Hu, M.; Tan, Q.; Fang, H.; Yi, C.; Bao, A. Soil-soil engaging component SPH model based on a hypoplastic constitutive model. Trans. Chin. Soc. Agric. Mach. 2022, 38, 47–55. [Google Scholar] [CrossRef]
- Cao, Z.; Cui, J.; Zhan, X.; Li, Y.; Wang, Y.; Yu, X.; Liu, W.; Song, S. Simulation and experimental study of soil cutting process by subsoiler based on SPH method. J. Agric. Mech. Res. 2019, 41, 28–34+41. [Google Scholar] [CrossRef]
- Sun, H. Simulation and experimental study of soil cutting process by ditching component in orchard. J. Chin. Agric. Mech. 2019, 40, 190–194. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Fen, M.; Zhang, H. The soil cutting dynamics simulation and research based on SPH /FEM coupling algorithm. J. Agric. Mech. Res. 2017, 39, 21–27+33. [Google Scholar] [CrossRef]
- Zhu, L.; Sun, Y.; Wang, H.; Leng, Z.; Yang, L.; Yang, M. Simulation of cutting soil of the mini-tiller rotary blade roller based on Finite Element Method. J. Agric. Mech. Res. 2020, 42, 39–43. [Google Scholar] [CrossRef]
- Han, Y.; Li, Y.; Zhao, H.; Chen, H.; Liu, D. Simulation of soil cutting by vertical rotary blade based on SPH method. J. Southwest Univ. (Nat. Sci.) 2016, 38, 150–155. [Google Scholar] [CrossRef]
- Zhu, C.; Zhu, L.; Huang, C. Simulation research of soil cutting based on FEM-SPH method. J. Agric. Mech. Res. 2015, 37, 54–58. [Google Scholar] [CrossRef]
- Yang, J.; Wang, C.; Wang, F.; Yang, X. Simulation of soil-tillage tool interaction using finite element analysis. J. China Agric. Univ. 2015, 20, 185–193. [Google Scholar] [CrossRef]
- Fang, H.; Ji, C.; Zhang, Q.; Guo, J. Force analysis of rotary blade based on distinct element method. Trans. Chin. Soc. Agric. Mach. 2016, 32, 54–59. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Shan, Y.; Wang, H.; Shi, X. Finite Element simulation research and key parameter optimization of rotary plowing parts. J. Agric. Mech. Res. 2023, 45, 36–42. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, Z.; Lai, Q.; Sun, W.; Xie, G.; Tong, J. Design and experiments of the Bouligand structure inspired bionic wear resistant soil-engaging component for the agricultural machinery. Trans. Chin. Soc. Agric. Mach. 2023, 39, 28–37. [Google Scholar] [CrossRef]
- Zhou, A.; Luo, H.; Xu, X.; Xu, Q.; Zhu, Y. Numerical simulation of soil cutting process based on material point method. Mech. Electr. Eng. Technol. 2023, 52, 1–6+171. [Google Scholar] [CrossRef]
- Niu, W.; Mo, R.; Sun, H.; Han, Z. Predication of the titanium alloy's chip morphology based on TANH constitutive model and smoothed particle hydrodynamic method. J. Shanghai Jiao Tong Univ. 2019, 53, 624–632. [Google Scholar] [CrossRef]
- Liu, G.R.; Liu, M.B. Smoothed Particle Hydrodynamics: A Meshfree Particle Method; World Scientific: Singapore, 2004. [Google Scholar]
- Zhou, X.; Ma, X.; Liao, X.; Qi, S.; Li, H. Numerical simulation of abrasive water jet impacting porous rock based on SPH method. Chin. J. Geotech. Eng. 2022, 44, 731–739. [Google Scholar] [CrossRef]
- Ma, X.; Mamtimin, G.; Yan, Y.; Jin, A. Simulation and forecast the process of droplet impacting on elastic solid. Comput. Simul. 2020, 37, 242–246+338. [Google Scholar]
- Bui, H.H.; Fukagawa, R.; Sako, K.; Ohno, S. Lagrangian meshfree particles method (SPH) for large deformation and failure flows of geomaterial using elastic-plastic soil constitutive model. Int. J. Numer. Anal. Methods Geomech. 2008, 32, 1537–1570. [Google Scholar] [CrossRef]
- Dong, X.W.; Liu, G.R.; Li, Z.L.; Zeng, W. A smoothed particle hydrodynamics (SPH) model for simulating surface erosion by impacts of foreign particles. Tribol. Int. 2016, 95, 267–278. [Google Scholar] [CrossRef]
- Wang, B.; Xu, H.; Zhang, L.; Zhang, H.; Wang, H. Progressive prognosis rupture prediction based on Johnson-Cook damage criterion based on principal component regression. China Acad. J. Electr. Publ. House 2023, 167–174. [Google Scholar] [CrossRef]
- Bui, H.H.; Sako, K.; Fukagawa, R.; Wells, J. SPH-Based Numerical Simulations for Large Deformation of Geomaterial Considering Soil-Structure Interaction. In Proceedings of the International Conference of International Association for Computer Methods & Advances in Geomechanics, Goa, India, 1–6 October 2008. [Google Scholar]
- Monaghan, J.J. Simulating Free Surface Flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Material Properties | Symbol | Value |
|---|---|---|---|
| Soil | Density | 1540 kg/m3 | |
| Cohesive force | c | 5 kPa | |
| Friction angle | 28° | ||
| Bulk modulus | K | 1.5 MPa | |
| Shear modulus | G | 0.9 MPa | |
| Tillage tool | Density | 2800 kg/m3 | |
| Shear modulus | G | 26 GPa | |
| Poisson’s ratio | 0.33 | ||
| Melting temperature | 925 K | ||
| Specific heat | 875 J/(kg K) | ||
| J–C plasticity model | A | 324 MPa | |
| B | 114 MPa | ||
| N | 0.002 | ||
| C | 0.42 | ||
| m | 1.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, H.; Ren, Y.; Yang, S.; Tan, Q.; Gao, T.; Bao, A.; Hu, M. Simulation of Plastic Deformation Failure of Tillage Tools Based on the Smoothed Particle Hydrodynamics Method. Processes 2024, 12, 86. https://doi.org/10.3390/pr12010086
Fang H, Ren Y, Yang S, Tan Q, Gao T, Bao A, Hu M. Simulation of Plastic Deformation Failure of Tillage Tools Based on the Smoothed Particle Hydrodynamics Method. Processes. 2024; 12(1):86. https://doi.org/10.3390/pr12010086
Chicago/Turabian StyleFang, Hanzhen, Yi Ren, Shi Yang, Qiuting Tan, Tao Gao, Anhong Bao, and Man Hu. 2024. "Simulation of Plastic Deformation Failure of Tillage Tools Based on the Smoothed Particle Hydrodynamics Method" Processes 12, no. 1: 86. https://doi.org/10.3390/pr12010086
APA StyleFang, H., Ren, Y., Yang, S., Tan, Q., Gao, T., Bao, A., & Hu, M. (2024). Simulation of Plastic Deformation Failure of Tillage Tools Based on the Smoothed Particle Hydrodynamics Method. Processes, 12(1), 86. https://doi.org/10.3390/pr12010086