4.1. Illustrative Scalar Process
We consider an example process that has one state and one manipulated input:
where
,
, and
for all
are the process state, the measured output, and the manipulated input, respectively. The scalars,
and
, model the bounded measurement noise and the process disturbance, respectively. The process may be under a multiplicative attack that modifies the operational data over all PCS communication links, which are represented by
and
. To analyze the closed-loop process, we define an augmented state that is a concatenation of the process state and the estimation error as follows:
. With this definition, the evolution of the augmented state of the process is described by Equation (9) with
,
,
. For process monitoring, we consider a monitoring variable that is a concatenation of the measured output and the residual vectors
. The monitoring variable
may be expressed in the form of in Equation (12) with
and
.
We choose the nominal controller gain
to minimize the quadratic cost
, with
,
, and the nominal observer gain as the steady-state Kalman filter gain with covariance matrices
and
. Likewise, we choose the attack-sensitive parameters such that the attacked closed-loop process operated under the attack-sensitive mode is unstable in the sense that
over the attack range
and
, and
and
. The matrix pair
is observable over the attack range considered for selecting the attack-sensitive parameters. The values of the nominal and attack-sensitive control parameters are
and
. For the attack-free process, we compute invariant outer
-approximations of the minimum invariant set for the process under the nominal and the attack-sensitive modes with an error bound of
using the method described in [
32]. For brevity, in the remainder of this paper, we refer to the invariant outer
-approximation of the minimum invariant set as the minimum invariant set. For the attack-free process with the control system under the nominal mode, its reachable sets take 18 time steps to converge from the set of initial states to the minimum invariant set. Similarly, for the attack-free process operated exclusively under the attack-sensitive mode, the reachable sets of the augmented state from the set of initial states converge to the minimum invariant set in five time steps.
We consider the process under a transient operation when its state evolves from a set of initial states, that is, the polytope obtained by shifting all the vertices of the minimum invariant set of the attack-free process operated under the nominal mode by . To quantify the performance of the controller for the attack-free process operated under the attack-sensitive mode and the nominal mode, we perform two sets of simulations (each set consisting of 1000 simulations) of the attack-free process. In the first set, we consider the exclusive operation of the attack-free process under the nominal mode. In the second set, we consider the exclusive operation of the attack-free process under the attack-sensitive mode. Within a simulation set, at each time step of each simulation, we vary the values of the process disturbance and the measurement noise, which we model as random variables drawn from two separate normal distributions with . However, across simulation sets, we use the same values of process disturbance and measurement noise. Within each simulation, we consider the evolution of the process for 1000 time steps, and we initialize the state at . We compare the quadratic cost () across the simulation sets. Over the simulations of the process operated under the nominal mode, the average quadratic cost was found to be 648.66 with a standard deviation of 37.59. Similarly, over simulations of the process operated under the attack-sensitive mode, the average quadratic cost was found to be 1189.68 with a standard deviation of 156.77. Comparing the performance of the controller between the two modes, it can be concluded that the controller performance is worse under the attack-sensitive mode. This result demonstrates that to manage the tradeoff between attack detection and the attack-free performance degradation resulting from control mode switching, intermittent switching from the nominal control mode to the attack-sensitive control mode may be preferred to operation under the attack-sensitive control mode exclusively.
We now apply the switching-enabled detection method (Algorithm 1) over simulations of the process during the transient operation for the detection of an attack with
and
. First, we analyze the detectability of the attack when the process is operated under the nominal control mode by comparing the reachable sets associated with the attack-free process to those associated with the attacked process.
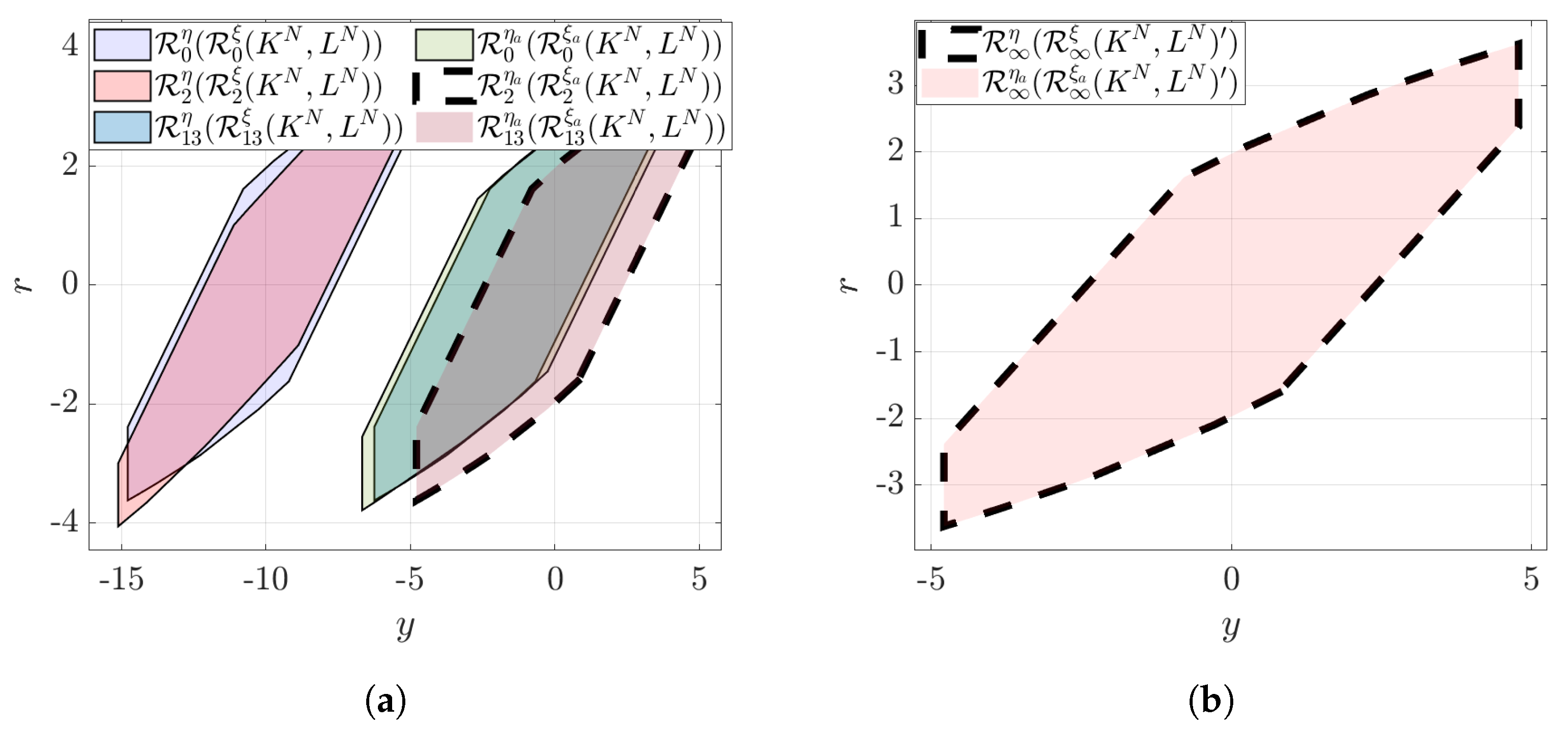
Figure 1a illustrates the reachable sets for the process operated under the nominal mode over a few time steps during transient operation. As illustrated, at time steps
, the reachable sets for the attacked and the attack-free process always intersect; however, the attacked reachable sets are not contained within the attack-free reachable sets, meaning that the attack is potentially detectable. The transient operation of the attacked process lasts over 12 time steps over the time interval
. Over all time steps during transient operation of the process, the attack is found to be potentially detectable because the reachable sets satisfy
and
. At time step
, the reachable sets of the attacked process converge to the terminal set of the attacked process. Therefore, to analyze attack detectability over the time steps
, the terminal set of the process under attack is compared with the reachable sets of the attack-free process, and the attack is found to be undetectable.
Figure 1b illustrates the terminal set of the attack-free process and the terminal set of the attacked process, showing that the attack on the process under steady-state operation is undetectable due to the fact that the terminal set of the attacked process is contained entirely within the terminal set of the attack-free process, i.e.,
. To verify attack detectability analysis, we consider 1000 simulations of the attacked process operated exclusively under the nominal mode and monitored by the reachable set-based detection scheme in Equation (15). We initialize each simulation at
and consider the evolution of the process states over 1000 time steps. Over all simulations, we vary the values of the process disturbances and measurement noise similar to the previous simulation sets. Over all simulations considering the process under an attack, the attack is not detected.
We apply the switching-enabled active detection method over simulations of the transient closed-loop process, and for monitoring, we use the reachable set-based detection scheme in Equation (15). We design two sets of simulations (each consisting of 1000 simulations of the process) similar to the simulations considered earlier when comparing the quadratic cost under the nominal and attack-sensitive modes. In the first simulation set, we consider the attack-free process, while in the second simulation set, we consider the attacked process with the attack beginning at time step . In this section, detection of an attack on the process during transient operation is considered. Over each simulation, the switching-enabled attack detection method implements a single control mode switch at a randomly chosen time instance in the interval when the attack-free process states under the nominal control mode are not within the minimum invariant set for the process operated under the nominal mode. Since the simulations consider a single switch between the two modes, we do not specify a minimum dwell time for each mode. Similarly, over simulations that consider the process operated under the attack-sensitive control mode, we use a dwell time of . Across simulations of the attack-free and the attacked processes, we consider the same switching instance. To implement the detection scheme, we compute the attack-free reachable sets online at each time step by using Equation (14) with selected based on the process operation mode (under the nominal mode , while under the attack-sensitive mode ). However, to reduce the computational load, the online computation of the reachable sets is terminated at the time step when the attack-free augmented state is expected to be contained within the minimum invariant set for the process operated under the mode of operation considered. After termination of online computation of the reachable sets, the terminal set of the monitoring variable for the attack-free process under the mode of operation considered is used to monitor the process.
Over the 1000 simulations that consider the attack-free process, a switch from the nominal to the attack-sensitive control mode is implemented at time steps chosen randomly over the time interval
. No attack detection occurs over all simulations after the first switch from the nominal control mode to the attack-sensitive control mode, and the control mode switches back to the attack-sensitive mode after 150 time steps from the first switch. No false alarms were observed over all simulations. Under the second simulation set, detection of the attack occurs over all simulations within a minimum of 5 time steps and a maximum of 135 time steps from the control mode switch. Over all simulations, the control system switches back to the nominal control mode, after which the attack is not detected.
Figure 2a,b show the values of the monitoring variable over a few time steps of one simulation considering the attack-free process, and one simulation considering the attacked process, respectively. Over both simulations, the control parameters switch from the nominal to attack-sensitive values at time step
.
Figure 2a shows the values of the monitoring variable values observed when the switch is implemented over a simulation considering the attack-free process. At time step
, no false alarm is generated as the value of the monitoring variable at that time step represented by the blue diamond marker is contained within the attack-free reachable set at that time step, which is the set shown in green. Similarly, no false alarm is observed at time step
because the monitoring variable value represented as the blue diamond is contained within the attack-free reachable set at that time shown as the set in white. While omitted for clarity, no false alarms are observed until the control mode switch at
because the monitoring variable values at each time step evolve within the corresponding attack-free reachable sets. After the switch is implemented, the process is operated under the attack-sensitive mode for 150 time steps, during which no false alarms are observed. At time step
, an attack is not detected, causing the control system to switch back to the nominal mode. No false alarms are observed even after this switch until the end simulation, at time step
, when the monitoring variable value represented by the blue star marker is contained within the attack-free terminal set shown as the set in purple.
Figure 2b shows the values of the monitoring variable over a few time steps of a simulation considering the process under the attack. At time step
, the attack on the process under the nominal mode is not detected because the monitoring variable value represented by the blue triangle marker is contained within the attack-free reachable set at that time step, shown as the green set. While omitted for clarity, the attack is not detected during the process operation under the nominal mode because the monitoring variable values over the time interval
are contained within the corresponding attack-free reachable sets. After a switch from the nominal control mode to the attack-sensitive control mode, the attack is detected the time step
because the monitoring variable value represented by the red star marker leaves the attack-free reachable set (which is the terminal set of the process operated under the attack-sensitive control mode) at that time step shown as the white set. In this case, attack detection occurs after the reachable sets of the attack-free process converge to its terminal set under the attack-sensitive mode. After the attack is detected, the control systems switches back to the nominal control mode and no further alarms are observed because the monitoring variable values at each time step are contained within the corresponding attack-free reachable sets until the end of simulation when the attack-free reachable sets have converged to the terminal set of the attack-free process under the nominal control mode. The monitoring variable value at time step
(end of the simulation) is represented by the blue diamond marker, and as shown, no alarm is observed at this time step because the monitoring variable is contained within the attack-free terminal set shown as the set in purple. These results demonstrate that the switching-enabled attack detection method utilizing the reachable set-based detection scheme enables attack detection on a dynamic process while guaranteeing a zero false alarm rate due to a control mode switch implemented at a randomly chosen time step.
4.2. A Continuous Stirred Tank Reactor
We consider an example process that consists of a continuous stirred tank reactor (CSTR) with a second-order exothermic reaction of the form
. The process dynamics are modeled by the following system of ordinary differential equations:
where
and
are the inlet reactant concentration and feed temperature, respectively, and
and
T are the reactant concentration and reactor temperature, respectively. The rate of heat transfer to or from the reactor
Q is chosen as the manipulated input. The process is subject to bounded disturbances modeled as variations in the inlet reactant concentration
and variations in the feed temperature
. The bounded process disturbances are within the limits
and
. The measured variable available to the controller is the reactor temperature
T. The bounded noise in the measurements from the sensor is within limits such that
.
Table 1 provides a list of the definitions and values of the process parameters. Because the measurement of all possible states of the reactor are not available to the controller, the illustrative example presented in this section considers a case where the output matrix
C is non-square and non-invertible.
To obtain a model similar to Equation (1), the continuous-time nonlinear process model in Equation (21) is discretized using a sampling interval of
. The system matrices for the linearized CSTR process are:
The nominal observer gain is chosen as the steady-state Kalman filter gain with covariance matrices, , and the nominal controller gain is chosen to minimize the quadratic cost with and . The attack-sensitive control parameters are chosen so that the attacked closed-loop process under the attack-sensitive mode is unstable under a range of attacks by checking if over the attack range , , and , . Over the attack range considered, the matrix pair is observable, indicating that all attacks in the range considered are potentially detectable.
In this section, we apply the switching-enabled detection method on the CSTR process under steady-state operation, when all values of the process states are bounded within the minimum invariant set of the process. The disturbance set is modeled as a zonotope with the origin as the center. To compute invariant outer
-approximations of the minimum invariant set (henceforth referred to as the minimum invariant set for brevity) of the attack-free process under the nominal and the attack-sensitive modes, we use the method in [
40] and use an error bound of
. For a switch performed on the attack-free process from the nominal control mode to the attack-sensitive control mode, we compute the reachable sets with the set of initial states
for
time steps when the sets are contained entirely within the minimum invariant set of the attack-free process under the attack-sensitive mode. Similarly, for a switch from the attack-sensitive control mode to the nominal control mode, we compute the reachable sets for the attack-free process with the set of initial states
until they converge to the minimum invariant set under the nominal control mode after
time steps. We use the monitoring variable vector
and compute its terminal set under each control mode and the reachable sets after each control mode switch until they are contained entirely within the terminal set under the new mode.
Initially, we perform two simulation sets to compare the quadratic cost () for operating the process exclusively under the nominal mode with the cost of operation of the system exclusively under the attack-sensitive mode. The first set of simulations consider the attack-free process operated exclusively under the nominal mode, while the second set of simulations considers the exclusive operation of the attack-free process under the attack-sensitive mode. Under each set, 1000 simulations considering the process operating under attack-free conditions are conducted. Each simulation considers the evolution of the process over 1500 time steps spanning in real time. We model the process disturbances on the feed concentration as random variables drawn from a distribution with , and we model the process disturbance and measurement noise on the feed temperature and the temperature of the reactor (the measured output) as random variables picked from two distinct normal distributions with . Over each time step of each simulation, we vary the values of the random variables representing the process distribution and the measurement noise. However, we use the same values of random numbers across simulation sets. The disturbances are clipped at the absolute value of their bound to ensure that there are no false alarms (e.g., if the absolute value random number representing exceeds 0.015, it is set to 0.015). Each simulation is initialized at the origin, which is contained within the minimum invariant sets of the process under the attack-sensitive and the nominal modes. Over all simulations, considering the process operated under the nominal mode, the quadratic cost has a mean of and a standard deviation of . However, for the process operated exclusively under the attack-sensitive mode, the quadratic cost has a mean of and a standard deviation of . Therefore, the performance of the controller under the attack-sensitive mode is higher than under the nominal mode, indicating that switching may be preferable to extended process operation under the attack-sensitive control mode.
Next, we perform two simulation sets of the process monitored by the reachable set-based detection scheme in Equation (15). In the first set, we implement Algorithm 2 over simulations considering the process without an attack to show that there are no alarms generated from consecutive control mode switches implemented at randomly chosen time steps. To this end, we consider the detection of an attack with and . The attack beginning at time step on the process operated only under the nominal mode is not detected over 1000 simulations, even though it is potentially detectable. Therefore, in the second simulation set, we implement Algorithm 2 over 1000 simulations of the attacked process (attack begins at ). Over simulations considering the process operated under the attack-sensitive mode, we restrict the dwell time under attack-sensitive mode to . Over each simulation, the switching instances are chosen randomly such that a maximum of three switches from the nominal to the attack-sensitive control mode and back from the attack-sensitive to the nominal control mode are possible over each simulation. Specifically, the first switching instance from the nominal to the attack-sensitive control mode () is selected as a random integer in the interval . The second switching instance from the nominal control mode () is based on the first switching instance by selecting a random integer over the interval . If no attack is detected, then we allow for a third instance of a switch from the nominal control mode to the attack-sensitive control mode, with the switching instance chosen as a random integer over the interval . We do not specify a minimum dwell time for operation under the nominal mode since the simulations consider a finite number of switches between the different control modes.
Over all simulations considering the attack-free process, no alarms are observed, and a minimum of two and a maximum of three control mode switches are implemented. Over all simulations, the process is under the nominal mode at the end of the simulation.
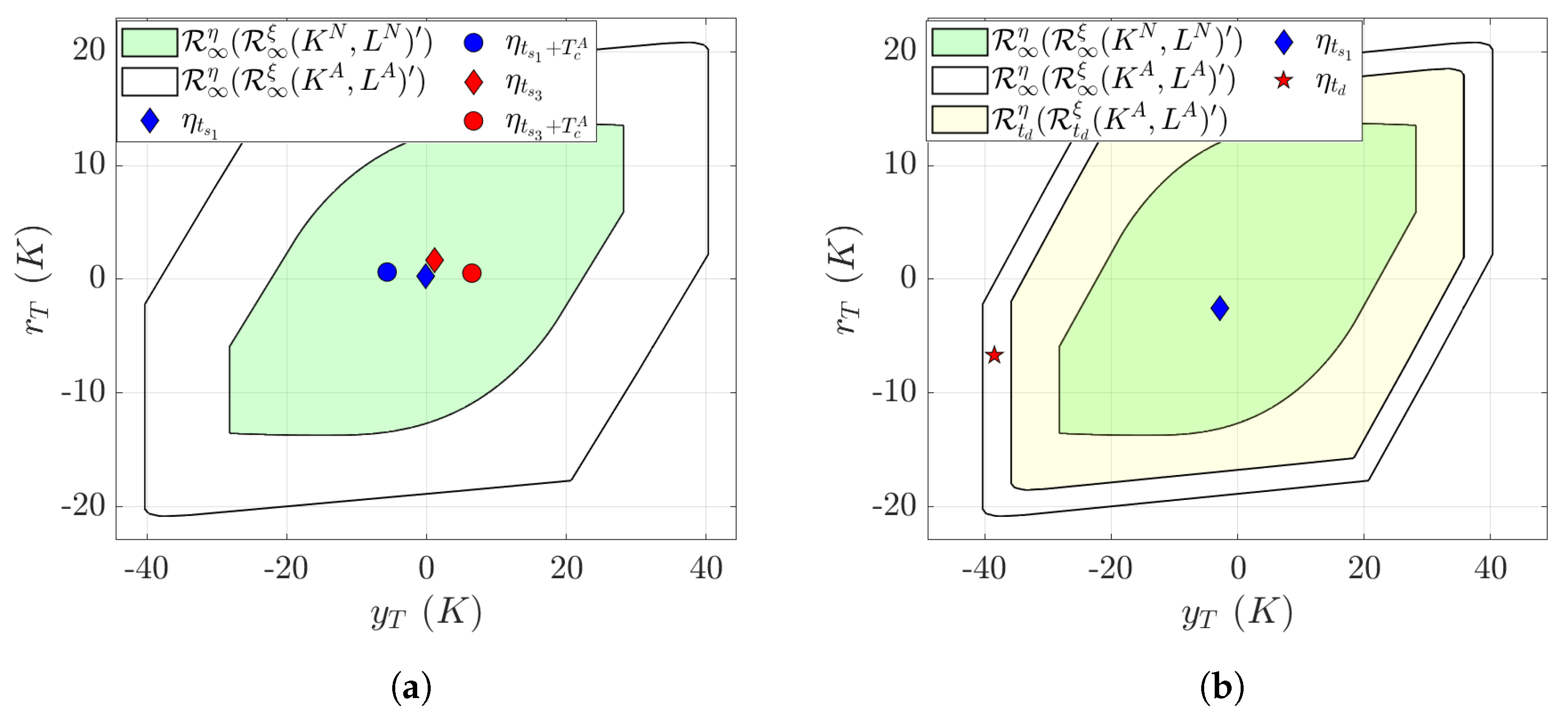
Figure 3a illustrates the values of the monitoring variable observed over a few time steps of a simulation of the attack-free process over which there are three consecutive switches from the nominal to the attack-sensitive control mode implemented at time steps
,
, and
. Over all simulations of the attack-free process, no false alarms are observed. While omitted for clarity in
Figure 3a, the monitoring variable values before the time step
evolve within the terminal set of the attack-free process under the nominal control mode shown as the green set and no false alarms are observed until the first switching instance
when the control system switches to the attack-sensitive control mode. No false alarms are observed during process operation under the attack-sensitive control mode. As a result, after the dwell time under the attack-sensitive mode elapses, the control system switches back to the nominal mode at time step
. As shown, no false alarm is observed at
because the monitoring variable value (indicated by the blue circle marker) is contained within the terminal set of the attack-free process under the attack-sensitive control mode (indicated by the white set). While omitted here for brevity, no false alarms are observed during process operation under the nominal control mode, and a second switch to the attack-sensitive control mode occurs at time step
, when the monitoring variable value (indicated by the red diamond marker) is contained within the attack-free terminal set. Even after the second control mode switch, no false alarms are observed and the control system switches back to the nominal control mode after the dwell time under the attack-sensitive mode elapses at time step
, when the monitoring variable value (indicated by the red circle marker) is contained within the terminal set of the process under attack-sensitive mode. No false alarms are observed even after a third switch from the nominal to the attack-sensitive control mode occurs at
(monitoring variable value shown by purple diamond marker) followed by a switch back from the attack-sensitive to the nominal control mode at time step
(monitoring variable value shown by purple circle marker). The results demonstrate that the proposed control mode switching strategy guarantees a zero false alarm rate when implemented on the attack-free process.
Figure 3b illustrates the values of the monitoring variable observed over some time steps of one simulation of the process under the attack, over which the first switching instance is
. Until this control mode switch, the attack is not detected because the monitoring variable values evolve within the terminal set of the attack-free process under the nominal control mode. At the switching instance
, the monitoring variable value shown by the blue marker is contained within the terminal set of attack-free process under the nominal mode (shown as the green set), meaning that no attack is detected. After the control mode switch, no alarms are observed until the attack is detected at time step
when the reachable sets of the attack-free process are contained entirely within the terminal set of the attack-free process operated under the attack-sensitive control mode. As shown in
Figure 3b, at the detection time step
, the monitoring variable value of the process shown by the red diamond marker is not contained within the terminal set of the attack-free process operated under the attack-sensitive control mode. Over all simulations of the process under attack, detection of the attack occurs after the first control mode switch within a minimum of 4 time steps and a maximum of 69 time steps from the switching instance. The results demonstrate that the reachable set-based detection scheme in Equation (15) guarantees attack detection with a zero false alarm rate, for a randomly chosen switching instance, even when the output matrix
is non-invertible.
4.2.1. Comparison of Randomized and Scheduled Control Mode Switching
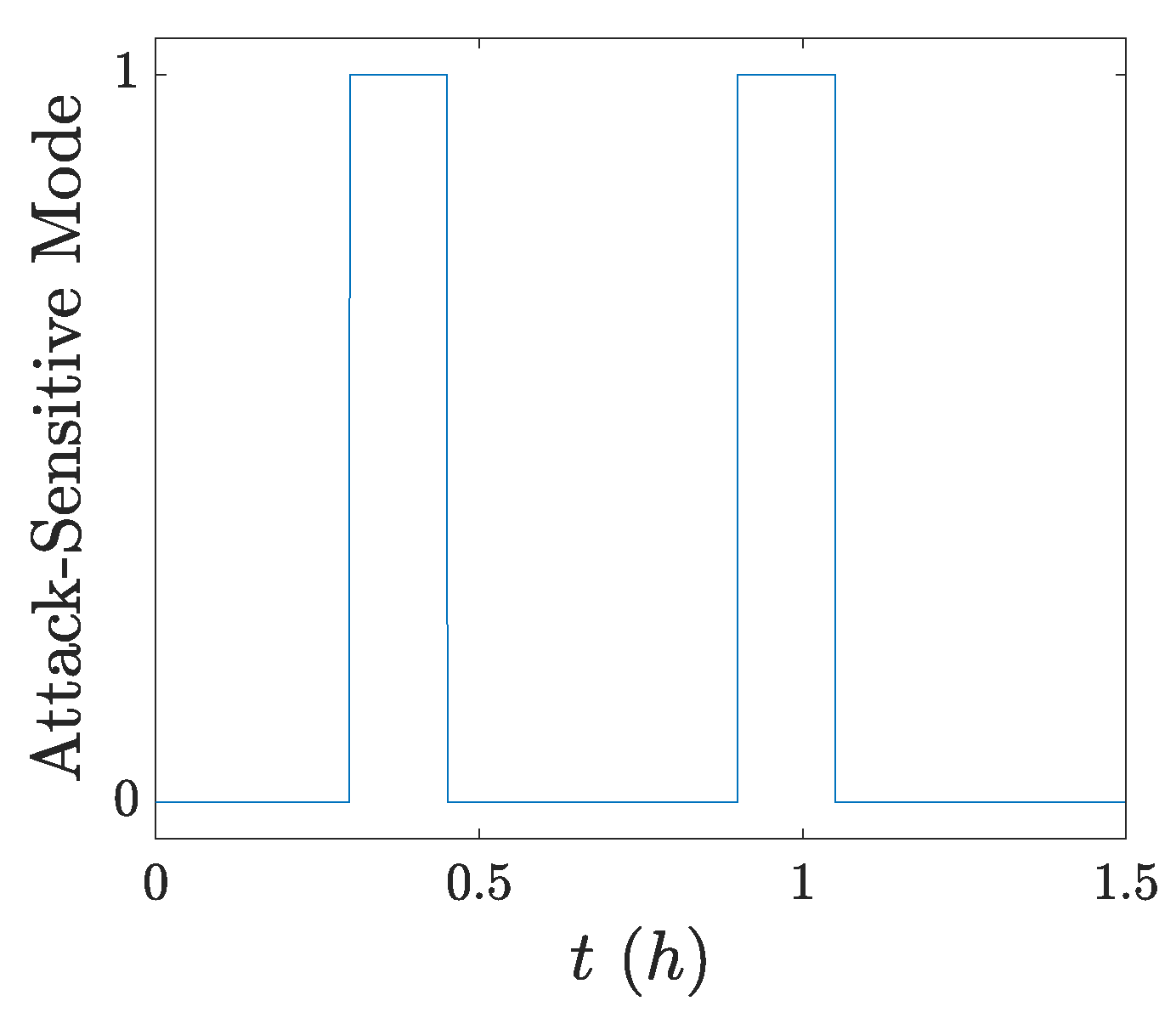
In this section, we demonstrate the application of the randomized control mode switching to enable the detection of a “smart” attack that is designed to evade detection under a scheduled control mode switching-enabled attack detection method. We consider a simulation of the CSTR process, over which control mode switching is implemented per a fixed schedule as shown in
Figure 4. As illustrated, the switching schedule allows for two control mode switches between the nominal and the attack-sensitive control modes. For switching from the nominal to the attack-sensitive control mode, the first switching instance is
and the second switching instance is
. If no attack is detected on the process operated under the attack-sensitive control mode until the dwell time of
time steps elapses, the controller switches back to the nominal mode. We assume that an attacker who is aware of the switching schedule designs a smart attack that switches the attack matrices in sync with the control mode switching. Specifically, the attacker uses an attack with
and
when the process is expected to operate under the nominal control mode. While potentially detectable, the attack on the process operated under the nominal control mode is not detected. However, when the process is expected to operate under the attack-sensitive control mode, the attacker switches to using an attack with
and
under which the attacked process is stable. Similar to the attack on the process operated under the nominal mode, the attack on the process operated under the attack-sensitive mode is potentially detectable; however, the attack is such that it is not detected. The attack schedule is as shown in
Figure 5a,b.
We consider one simulation that considers the closed-loop process under the smart attack, with the control mode switch implemented per the schedule shown in
Figure 4. The process is initialized under the nominal control mode, with its initial state chosen as the origin. The reachable set-based detection scheme is used to monitor the process, similar to the previous section. The values of the process disturbances and measurement noise are varied at each time step over this simulation. The values of the monitoring variables at the switching instances over this simulation are illustrated in
Figure 6a. The attack is not detected over this simulation, demonstrating that an attacker with sufficient knowledge of the detection scheme may be able to design an attack that is capable of evading detection under a scheduled control mode switch.
Next, we perform 1000 closed-loop simulations considering the process subject to the smart attack but with randomized (rather than scheduled) control mode switching. Over each simulation, we use the same values of the process disturbances and measurement noise as in the first simulation with the scheduled control mode switch. However, we apply the control mode switches at randomly chosen time steps. Over each simulation, we allow for a maximum of three control mode switches. The first control mode switching instance from the nominal to the attack-sensitive control mode () is selected as a random integer generated over the interval . The second switching instance from the nominal to the attack-sensitive control mode () depends on the first switching instance and is selected as a random integer generated over the interval . Finally, if an attack is not detected over the two previous control mode switches, a third switch from the nominal control mode to the attack-sensitive control mode is implemented at time step () selected as a random integer generated over the interval . The third switch from the nominal to the attack-sensitive control mode is implemented only if so that at the end of each simulation, the process is under the nominal control mode.
Over all simulations considering the process under the attack and the randomized control mode switching, the detection of the smart attack occurs after the first control mode switch within a minimum of 4 time steps and a maximum of 40 time steps from the switching instance.
Figure 6b illustrates the attack detection over a simulation considering the process under the smart attack with the randomized control mode switching-enabled attack detection method. Over this simulation, the control mode switch is implemented at time step
leading to attack detection at
. Because an attack is detected after the first control mode switch, no further switches are implemented by the detection scheme. The results demonstrate that from the perspective of enabling attack detection, a randomized control mode switching method may be preferred to a scheduled control mode switching method because an attacker may not be able to design a smart attack that is capable of evading detection.
Remark 5. Figure 4 is an illustrative example for the operation of the CSTR process under the scheduled switching-enabled detection strategy. An operator may choose to implement a switching-enabled detection strategy on the process that uses other periodic or non-periodic patterns for switching between the nominal and the attack-sensitive modes. Irrespective of the pattern of operation, an attacker with knowledge of the switching schedule may be able to design a detection-evading smart attack. Comparison of attack detection between scheduled and randomized switching-enabled strategies for smart attacks designed to evade detection under scheduled switching with patterns other than the one shown in Figure 4 may require a case-by-case analysis. Nevertheless, we anticipate that operating the CSTR process under the randomized switching-enabled strategy will help preserve the confidentiality of the detection scheme and thus enable attack detection over more simulations than under the scheduled switching-enabled detection strategy. 4.2.2. Application to the Nonlinear CSTR Process
We demonstrate the application of the proposed switching-enabled attack detection method to detect a smart attack on the nonlinear sampled-data model of the CSTR process. In all simulations considered in this section, the CSTR is modeled using its continuous-time nonlinear process model in Equation (21), and the linear control law and the Luenberger observer are applied with a zero-order hold that considers a sampling interval of
. To solve the differential equations modeling the CSTR, we use the explicit Euler’s method with an integration time step of
. We model the process disturbances and measurement noise values as random numbers drawn from a Gaussian distribution. Specifically, we model the disturbance in the feed concentration (
) as random variables drawn from a distribution with
and the disturbance in the sensor measuring the temperature of the feed to the reactor and the measurement noise in the sensor measuring the temperature of the reactor as random variables drawn from two distinct distributions with
. The disturbances are drawn from normal distributions with a smaller standard deviation than those used over the simulations in the
Section 4.2.1. This is performed to ensure the validity of the reachable and terminal sets computed using the linear process model and enable process monitoring using the detection scheme in Equation (15).
Similar to the previous section, we first simulate the closed-loop process under a smart attack (
Figure 5a,b) with a scheduled control switching-enabled attack detection method as in
Figure 4. Over this simulation, the closed-loop system is initialized at the origin, and the process disturbances and measurement noise are varied at each sampling instance. As illustrated in
Figure 7a, based on the values of the monitoring variables at the switching instances, it can be seen that the smart attack is not detected with the scheduled control mode switching approach. We then perform 1000 simulations of the attacked process with the same process disturbance and measurement noise considered in the simulation with the scheduled switch. Over each simulation, a randomized control mode switching is implemented, where the switching instances are the same as over the corresponding simulations for the linear CSTR process model in
Section 4.2.1. Over all simulations, detection of the attack occurs within a minimum of 5 time steps (
in real time) and a maximum of 44 time steps (
in real time) from the first switching instance.
Figure 7b illustrates the evolution of the monitoring variable over a few time steps of the process under the smart attack, with the control mode switch implemented randomly. Over this simulation, attack detection occurs at time step
(
in real time), which is 10 time steps after the first switch from the nominal control mode to the attack-sensitive control mode is implemented at time step
(
in real time). The reachable set for the attack-free process at the detection time step is contained entirely within the terminal set. The result highlights that, for this simulation, monitoring of the process using a reachable set-based detection scheme may be preferable to monitoring of the process using the terminal set-based detection scheme to aid in the detection of the attack at the earliest time step possible. Following the detection of the attack, the process is switched back to the nominal control mode and no further alarms are observed in the detection scheme.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}