1. Introduction
In the past decade, the ratings of offshore wind farms have been increasing rapidly and they are being planned far from the grid connection point [
1,
2]. However, the conventional AC transmission through submarine cables produces a significant amount of reactive current due to its high capacitance, which reduces the current-carrying capacity and often requires extra reactive power compensation devices [
3,
4].
A voltage-source converter-based high voltage direct current (VSC-HVDC) transmission system is the favorable solution for offshore DC connection since it does not require a strong offshore or onshore AC grid and can even start up against a dead network (black-start capability) [
5]. A VSC-HVDC transmission system also allows the independent control of active and reactive power, which reduces the requirement for reactive-power compensation and is able to contribute to the stabilization of the connected onshore AC grid [
6,
7,
8].
However, one inevitable challenge for VSC-HVDC transmission systems which are applied to integrating offshore wind farms is the fault ride-through (FRT) capability which is stipulated by grid codes [
9]. FRT capability enables offshore wind farms to remain connected during abnormal onshore AC grid conditions like voltage deviations [
10].
Figure 1 demonstrates a FRT time-voltage profile set by the German Transmission and Distribution Utility (E.ON) regulation [
11]. The FRT requirement contains zero voltage ride-through (ZVRT), low-voltage ride-through (LVRT), and high-voltage ride-through (HVRT). This paper focuses on investigating the ZVRT and LVRT. E.ON also requires additional reactive current from WECS for grid voltage support during voltage sags. The corresponding controller must take action within 20 ms after fault recognition. The required reactive current is required to be changed relative to the pre-fault operation in the case of the voltage deviation exceeds a deadband of
around the nominal value. Up to 100% of the WECS rated current is expected to be used for this support. The WECS is required to get back to normal generation immediately after fault clearance [
12].
Although FRT attracted many research works, most of them are mainly studying the FRT capability of individual wind turbines and these proposed works all caused considerable efforts in large-scale wind farms, which are formed by huge numbers of wind turbines. Investigating FRT capability on VSC-HVDC transmission system is regarded as a smarter way. There are two major types of approaches to enhance the FRT capability: control improvement and hardware modification.
FRT capability can be enhanced by installing additional protection devices, such as DC choppers with braking resistors [
13], flywheel energy storage system [
14], and novel topology like nine switch converter [
15]. Installing extra devices used for providing voltage compensation, energy consumption, or storage are effective yet being limited by the high cost and heat dissipation capacity. These methods also bring the complicated control of energy storage circuits or novel converter. Another effective alternative put forward to enhance the FRT of the HVDC is to modify the control strategies applied on the converters. In [
16], fuzzy logic controller for temporary blocking the VSC converter is proposed during AC grid fault. However, even when the insulated gate bipolar transistors (IGBTs) in the sending-end VSC are blocked, the reverse current flowing via antiparallel diodes will still cause the power transmitting to the DC side [
15]. Different control strategies are applied for power reduction (de-loading strategies) to enhance the FRT performance, but are designed based on linear mode like mentioned in [
13,
17,
18,
19]. However, existing linear approaches cannot provide consistently satisfactory performance since they are all tuned specially based on one operation point and the time-varying nonlinearities and uncertainties are not being fully compensated. Due to the poor-off standard operation point behaviour during AC network faults, inrush faulty grid-side current cannot be limited rapidly and may cause converter components to be damaged since the power electronics in converters are very sensitive to transient current surges [
20]. Feedback linearizing control (FLC) has been proposed in [
20] for solving the nonlinearity problem to improve the FRT performance of individual wind turbines. However, the FLC requires the accurate and precise system model and hence FLC will degrade dramatically in the presence of parameter uncertainties and external disturbances, which has adverse impacts on FRT performance. On the other hand, most FLC-based controllers require full state feedback and many measured variables to calculate the nonlinear controller. Since co-operating with the de-loading strategy will introduce more parameter uncertainties and disturbances caused by transients of slower mechanical response and can hardly provide real-time full state feedback, FLC is not suitable to be applied to this application. To improve these issues of the FLC, extended-order state and perturbation (or disturbance) observer (ESPO)-based nonlinear adaptive controller is proposed to use estimates of perturbation to compensate real perturbation and achieve the adaptive feedback linearizing control.
This paper develops a perturbation estimation-based nonlinear adaptive control (NAC) scheme with proper de-loading strategy for the FRT capability enhancement of VSC-HVDC systems. The combinatorial effect of nonlinearities, system parameter uncertainties, and external disturbances is aggregated into a perturbation, which is estimated by a high-gain perturbation observer (HGPO) [
21,
22,
23]. NAC is proposed to solve the nonlinearity problem and considered as the suitable method to enhance the FRT capability with de-loading strategy. The NAC-based VSC-HVDC converter controller only requires the measurement of active and reactive power and DC voltage, thus it provides the merit of inherently easy implementation in real systems. The effectiveness of the proposed strategy is verified by simulation under several cases, e.g., voltage sags and line-line-line-ground (LLLG) faults. The robustnesses against system parameter uncertainties and control efforts of conventional converter vector control (VC) without de-loading strategy, conventional VC with de-loading control, and proposed NAC-based converter control with de-loading control are analyzed and compared.
The rest of the paper is organized as follows. In
Section 2, the system configuration and corresponding models are presented. In
Section 3, the proposed NAC-based VSC controllers with de-loading strategy embedded are developed and discussed. Simulation results of Simulink are provided in
Section 4. Finally, conclusions are drawn in
Section 5.
2. System Configuration and Modelling
Figure 2 shows the typical configuration of the offshore wind farm needing to be integrated via VSC-HVDC system. The wind power plants in the offshore wind farm are represented by one aggregated wind turbine model which behaves like the sum of all those in this paper. Hence, the typical point to point VSC-HVDC transmission system with wind power integrated is shown in
Figure 3. The wind power generated is transmitted from sending end VSC station (SEC), which regulates the active and reactive power, to the receiving end VSC station (REC), which maintains the DC voltage and regulates reactive power. The reactive power control channel is used to support the grid voltage during faults. The VSC state-space representation [
24,
25] in VSC-HVDC transmission system after Park transformation into dq-axis:
where
and
are the dq components of current at point of common coupling (PCC),
and
are the dq components of voltage at PCC,
and
are the dq components of voltage at VSC terminal,
R and
L are the equivalent series resistance and inductance of the filter and transformer between the VSC terminal and corresponding PCC.
The instantaneous active power and reactive power at PCC can be expressed as follows without considering the power losses during the switching process:
The DC cables in VSC-HVDC transmission system are modelled as a nominal Pi configuration, which use approximated lumped-parameter models and are expressed as the following:
where
is the DC voltage difference between VSC terminals,
is one equivalent DC cable capacitance which is divided equivalently from cable shunt capacitance, each placed at the sending and receiving ends of the cable,
is the current flowing through DC cables,
and
are the resistance and inductance of DC cable. The Phase-locked loops (PLL) is assumed in a steady state, therefore
equals 0 [
26]. The global mathematical model of overall VSC-HVDC system is expressed as follows:
The active and reactive powers entering both REC and SEC can be expressed as:
where number 1, 2 subscript denote the variable corresponding to REC and SEC. Type-4 WECS configuration owns the second highest share now and is stated by the wind turbine manufacturers that this type technology would take over the wind energy market in the near future [
11]. Type-4 WECS configuration is attractive for the use of full-scale power converters which is operated with the permanent magnetic synchronous generator (PMSG), wound rotor synchronous generator (WRSG), and squirrel cage induction generator (SCIG). PMSG is the most popular generator among these three types and is chosen as the investigated objective in this paper.
With the full-scale power converters, the generator is theoretically fully decoupled from the grid and operated at full speed range. These adopted power converters can also support the grid with reactive power compensation and smooth grid connection. This configuration can also provide the highest wind energy conversion efficiency comparing with other types. For FRT capability without installing external hardware devices, the best compliance can be achieved with full-scale power converters comparing with other types. However, the FRT capability is still required to be improved because the mechanical system response is much slower than the electrical response, and the transient active power injected by wind turbine is critical to the stability of whole power system. The extra injected power, which is called ”surplus energy”, needs to be handled carefully. There are various proposed strategies, and the adopted strategy is described in the next section.
The equivalent aggregated type-4 wind turbine generator with PMSG model [
27,
28] is applied for simulation in this paper. The mechanical power
extracted by the wind turbine is expressed by
where
is the power extracted from the wind,
is air density,
is the area covered by the rotor,
is the wind speed, and
is the performance coefficient or power coefficient. Within
,
is the pitch angle of rotor blades,
is the tip speed ratio for which
, where
is blade tip speed.
where
Under normal operation, the dynamics of shaft system and mechanical torque are expressed by
where
is the mechanical torque,
is generator electrical torque,
is mechanical rotation speed of wind turbine,
H is the summation of wind turbine inertia constant and generator inertia constant.
D is the viscous damping coefficient which is taken to be 0 in this paper,
and
are the inductances in the d-q axis,
is the permanent magnetic flux given by the magnets,
R is the blade radius of wind turbine, and
p is the number of pole pairs.
The equivalent circuit model of the studied wind turbine generator can be expressed in the d-q axis, where the q-axis is fixed on the machine rotor and rotates at rotor speed,
where
and
are the stator voltages in the d-q axis,
and
are the currents in the d-q axis,
is the stator resistance,
is electrical rotation speed which equals
.
4. Simulation Results
The proposed approach is applied on the system displayed by
Figure 3. The FRT performance comparison of proposed de-loading NAC with conventional vector control (VC) [
33] and de-loading VC [
18] is presented in this section.
The system parameters used in the simulation are listed in
Table 1. The values of system variables are used in the per unit (p.u.) value. The NAC parameters illustrated in
Table 2 are tuned considering the application of the de-loading strategy, while control inputs are bounded as
p.u. and
p.u.,
, respectively. Moreover, the time period of the boundary values
s.
(1)
System response to voltage sag at onshore AC grid: The FRT capability is tested with voltage sag at different reduced voltage levels. Take the voltage sag at
of nominal voltage as an example, the response comparison of using proposing de-loading NAC with de-loading VC and conventional VC without de-loading process is displayed in
Figure 6 and
Figure 7. From analyzing the response obtained from REC, it can be seen as the voltage sag occurs at 0.2 and lasts 0.3 s. From comparing the overshoots in (b) (c) (d) of
Figure 6, the proposed de-loading NAC can provide most smooth performance during voltage sags. For better comparison, the AC current measured from REC is converted into the d-q axis and shown in (e) of
Figure 6. From comparing three control strategies in the d-q axis, it can be seen that proposed NAC could suppress current oscillations significantly. With the help of the de-loading strategy, the proposed control strategy can significantly reduce the peak current of the onshore grid. From analyzing the response obtained from SEC which shown in
Figure 7, the voltage of HVDC link can also be reduced significantly comparing with conventional controllers. Hence, the FRT capability is enhanced by proposed NAC de-loading strategy.
(2)
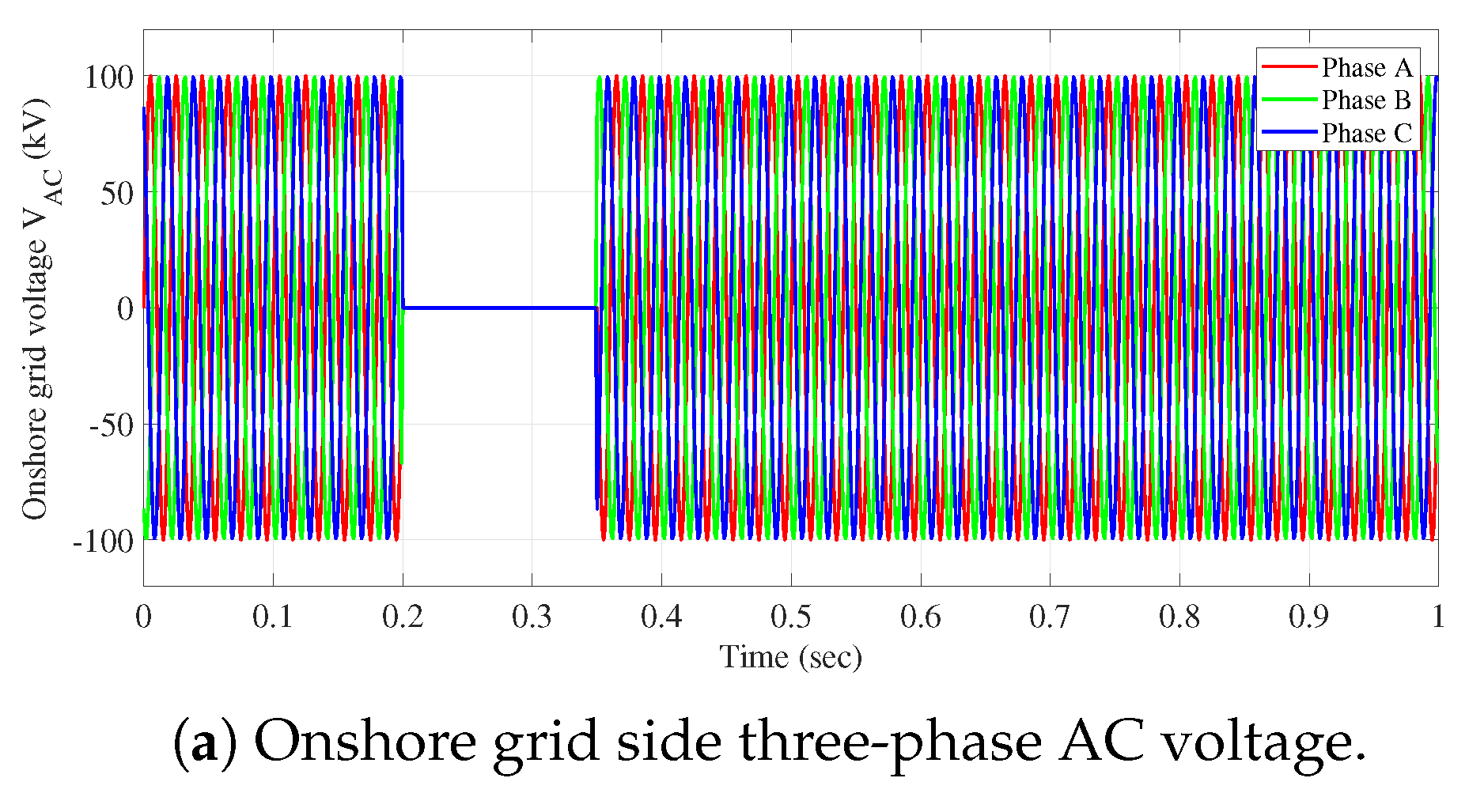
System response to line-line-line-ground (LLLG) fault at on shore AC bus: In this section, more severe fault is considered for the grid codes of some states. For example, German grid code stipulate that all types of generating plants should remain connected during AC grid voltage reduced down to 0% for 150 ms [
11,
12]. From (a) of
Figure 8, it can be seen that a 0.15 s LLLG fault is simulated at onshore AC bus from 0.2 s to 0.35 s. Due to the severe fault, the conventional VC without de-loading strategy or any extra FRT equipment loses the stability after fault completion because of extremely far operation point shift. From (b) of
Figure 8, it can be seen that the conventional VC cannot recover the nominal HVDC link voltage after such a long LLLG fault. From comparing the HVDC link voltage curve of de-loading VC and de-loading NAC, The proposed de-loading NAC is able to restore the system more rapidly with less voltage surge. Thus, NAC can significantly enhance the FRT capability of the VSC-HVDC systems with de-loading strategy.
(3)
System response to different reduced voltage levels at onshore AC grid: Further comparing the three methods in detail with numerical values, simulations with different reducing voltage levels from 100% to 10% at onshore AC grid are implemented in this section and displayed in
Figure 9. Since the conventional control strategy cannot restore the system and maintain stability after LLLG fault which lasts longer than 0.02 s, it needs to be noticed that the fault in this part is selected to be cleared after 0.02 s for whole range comparison, which is different from the previous sections. For such a short time fault, the proposed de-loading NAC cannot present an obvious advantage with de-loading VC in comparing currents at REC side and DC voltage. However, the proposed strategy still can provide a slight improvement on them and especially significantly suppression on regulating currents at the SEC side.
(4)
System response to AC grid with parameters variations: Since the main AC grid is extremely complex, which consists of large amounts of electrical devices with difficulties in fully detailed modelling like coupling reactors, transformers, AC filters different types of transmission lines or cables, and REC itself, the parameter variation at the onshore AC grid side is regarded as a common phenomenon due to temperature effects, minor internal faults, load change, and aging of these components. The parameter variation will cause mismatched and uncertain equivalent line impedance in simulating system model. The robustness against AC grid parameter uncertainties is tested and the comparison of two de-loading control strategies is illustrated in this section. The mismatches on reactance and resistance will cause different, equally severe impacts on FRT performance. Hence, different levels of mismatch are also evaluated in this section. From (a) and (b) of
Figure 10 with the simulation of 30% mismatch at onshore AC gird equivalent impedance, the proposed de-loading NAC strategy can provide better transient performance comparing with de-loading VC strategy. From comparing (c) and (d) of
Figure 10, the proposed de-loading NAC strategy can provide relatively smaller peak current and can relieve the impact on power electronics devices in systems. From comparing (e) and (f) of
Figure 10, the overshoots of DC voltage are also reduced via adopting the proposed de-loading NAC strategy.
(5)
System response to HVDC link with parameters variations: Besides mismatched parameters of the onshore AC grid, VC controller is more sensitive to mismatched parameters of HVDC link. The (a) and (b) of
Figure 11 demonstrate that the mismatched impedance of HVDC link will cause more severe oscillation when regulating DC voltage and AC currents during onshore AC grid voltage sag. Similarly, (c)–(f) of of
Figure 11 are used for evaluating the FRT performance under different level of mismatches of reactance and resistance. Unlike mismatches of parameters in AC grids, where mismatches of resistance and reactance play equally important roles on FRT performance, the mismatches of resistance play relatively severe impact on DC link comparing the mismatches of reactance. From (c) and (d) of
Figure 11, the peak AC current is suppressed and maintained into a relatively small range via adopting the proposed de-loading NAC strategy. From (e) and (f) of
Figure 11, although the overshoots of DC voltage varied obviously with fluctuation of resistance and the peak value increases linearly with the equivalent resistance value, the proposed de-loading NAC strategy still suppresses the DC voltage effectively comparing with conventional de-loading strategy.
(6)
System response for evaluating the de-loading strategy with different droop gains: For evaluating the FRT performance of adopting the proposed de-loading strategy with different droop gains, different droop gain
is adopted in de-loading control strategies.
is selected from 0.2 to 0.4 and then the system response of different droop gains is illustrated in
Figure 12. From comparing the simulation results with different droop gains, for both VC and NAC, larger droop gains can suppress AC currents and DC voltage overshoots more effectively. However, besides the FRT performance there is control performance need to be considered. To compare the control performance of each schemes in difference droop gains, the overall control costs is calculated and provided in
Table 3. Here, the control cost of the SEC controller
, where
is the initial value which being set in advance. The units of system variables are p.u. The simulation time
s such that all system states can converge to the equilibrium point after AC grid voltage sag. Note that under the nominal model, NAC has a little bit higher value than VC due to the estimation error, where the difference is only
,
,
,
, and
of the de-loading VC. For evaluating the different droop gains, it can be found that increasing the droop gains although enhances the FRT performance and also increases the control costs. In order to get satisfied FRT performance and also maintain the acceptable control efforts, 0.3 is chosen for proposed control strategy.
The integral of absolute error (IAE) indices for different approaches calculated in different situations are tabulated in
Table 4. Here,
.
is the reference value of the variable
x. The simulation time
T is set to be 0.5s. From
Table 4, proposed NAC does not provide much obvious better dynamic performance within the nominal system model. However, in the case of system parameter variations, it can provide much better dynamic performance. In particular, its
with AC grid parameter uncertainties and DC link parameter uncertainties are only 62.4% and 52.7% of those of VC control, its
with AC grid parameter uncertainties and DC link parameter uncertainties are only 72.1% and 66.7% of those of VC control.
In offshore WECS which are integrated into the mainland AC grid via HVDC system, transient inrush VSC currents are raised following a voltage sag on AC grid [
34]. Therefore, the offshore VSC current in HVDC system station is very important index to measure the FRT capability. According to multiple cases of simulation results mentioned above, the peak current is greatly suppressed via the proposed control approach. From all the simulation cases, it is obvious that the converter peak current is effectively reduced in comparison with conventional VC and deloading VC control. In particular, the REC peak current is only 75% and 87% of that of conventional VC control and deloading VC control with 35% voltage sag in nominal model. Since the peak current includes the rated current under normal operation,
is taken into consideration for better understand the improvement with proposed FRT strategy in comparison, where
is the peak value of the converter current and the
is the converter current set-point value when system under normal operation. The %overshoot of REC fault current with the proposed deloading NAC is only 52.1% and 71.8% of that of conventional VC control and deloading VC control, with 35% voltage sag in nominal model. In the case with parameter uncertainties, the peak current is only 85.9% of that of deloading VC control and %overshoot of fault current is only 69.2% of that of deloading VC control. Therefore, the enhanced FRT capability of proposed FRT strategy has been verified.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}