Experimental Study on Ramp Shock Wave Control in Ma3 Supersonic Flow Using Two-Electrode SparkJet Actuator



Abstract
:
1. Introduction
2. Experimental Setup
2.1. Supersonic Wind Tunnel
2.2. Experimental Model
2.3. Measurement System
2.4. Experimental Cases Set
3. Experimental Results
3.1. Shock Wave Attenuation and Elimination Characteristics
3.2. Effect of Discharge Capacitance
3.3. Effect of Exit Diameter
3.4. Effect of Ramp Distance
4. Conclusions
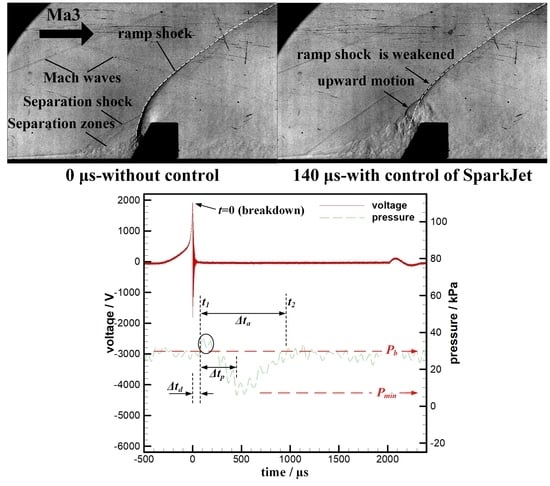
- Under control of SPJ and SPJ shock, not only the angle and position of the ramp shock are changed, but also the intensity is weakened. The measurement results of the ramp wall pressure show that the ramp pressure is reduced by a maximum of 79% compared to the pressure in the base flow field.
- Ten experimental cases are set for investigating and analyzing the effects of some parameters including discharge capacitance, exit diameter and ramp distance on the control effect of SPJ on the ramp shock in detail. The increase in discharge capacitance helps to improve the control effect of SPJ on the ramp shock. However, the control effect of SPJ actuator with medium exit diameter is better than that with too small or too large one. In addition, when the SPJ exit is located in the separation zone and outside, the change in the ramp shock shows significant differences, but the control effect on the ramp shock in the case of medium ramp distance is better when the SPJ exit is located outside the separation zone.
Author Contributions
Funding
Conflicts of Interest
References
- Meng, X.S.; Hu, H.Y.; Li, C.; Abbasi, A.A.; Cai, J.S.; Hu, H. Mechanism study of coupled aerodynamic and thermal effects using plasma actuation for anti-icing. Phys. Fluids 2019, 31, 037103. [Google Scholar] [CrossRef] [Green Version]
- Gao, T.X.; Luo, Z.B.; Zhou, Y.; Liu, Z.Y.; Peng, W.Q.; Cheng, P.; Deng, X. Novel deicing method based on plasma synthetic jet actuator. AIAA J. 2020, 58, 1–8. [Google Scholar] [CrossRef]
- Gao, T.X.; Luo, Z.B.; Zhou, Y.; Yang, S.K. A novel de-icing strategy combining electric-heating with plasma synthetic jet actuator. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020. [Google Scholar] [CrossRef]
- Chen, W.Q.; Jin, D.; Cui, W.; Huang, S.F. Characteristics of gliding arc plasma and its application in swirl flame static instability control. Processes 2020, 8, 684. [Google Scholar] [CrossRef]
- Liu, C.Y.; Sun, M.B.; Wang, H.B.; Yang, L.C.; An, B.; Pan, Y. Ignition and flame stabilization characteristics in an ethylene-fueled scramjet combustor. Aerosp. Sci. Technol. 2020, 106, 106186. [Google Scholar] [CrossRef]
- Wang, J.J.; Choi, K.S.; Feng, L.H.; Jukes, T.N.; Whalley, R.D. Recent developments in DBD plasma flow control. Prog. Aerosp. Sci. 2013, 62, 52–78. [Google Scholar] [CrossRef]
- Tang, M.X.; Wu, Y.; Guo, S.G.; Sun, Z.Z.; Luo, Z.B. Effect of the streamwise pulsed arc discharge array on shock wave/boundary layer interaction control. Phys. Fluids 2020, 32, 076104. [Google Scholar] [CrossRef]
- Popkin, S.H.; Cybyk, B.Z.; Land, B.; Foster, C.H.; Alvi, F.S. Recent performance-based advances in SparkJet actuator design for supersonic flow applications. In Proceedings of the 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Zong, H.H.; Kotsonis, M. Formation, evolution and scaling of plasma synthetic jets. J. Fluid Mech. 2018, 837, 147–181. [Google Scholar] [CrossRef]
- Grossman, K.R.; Cybyk, B.Z.; VanWie, D.M. SparkJet actuators for flow control. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003. [Google Scholar]
- Reedy, T.M.; Kale, N.V.; Dutton, J.C.; Elliott, G.S. Experimental characterization of a pulsed plasma jet. AIAA J. 2013, 51, 2027–2031. [Google Scholar] [CrossRef]
- Wang, L.; Xia, Z.X.; Luo, Z.B.; Zhou, Y.; Zhang, Y. Experimental study on the characteristics of a two-electrode plasma synthetic jet actuator. Acta Phys. Sin. 2014, 63, 194702. [Google Scholar]
- Huang, H.X.; Tan, H.J.; Guo, Y.J.; Sun, S.; He, X.M. Flowfield induced by a plasma synthetic jet actuator with low exit inclination angle under low ambient pressure. Aerosp. Sci. Technol. 2020, 105, 106018. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X. A novel model of plasma synthetic jet actuators coupled energy source term model with mechano-acoustical analogy model. J. Phys. D Appl. Phys. 2020, 53, 235204. [Google Scholar] [CrossRef]
- Seyhan, M.; Akansu, Y.E. The effect of a novel spark-plug plasma synthetic jet actuator on the performance of a PEM fuel cell. Int. J. Heat Mass Transf. 2019, 140, 147–151. [Google Scholar] [CrossRef]
- Chedevergne, F.; Bodoc, V.; Leon, O.; Caruana, D. Experimental and numerical response of a high-Reynolds-number M = 0.6 jet to a plasma synthetic jet actuator. Int. J. Heat Fluid Flow 2015, 56, 1–15. [Google Scholar] [CrossRef]
- Dufour, G.; Hardy, P.; Quint, G.; Rogier, F. Physics and models for plasma synthetic jets. Int. J. Aerodyn. 2013, 3, 47–70. [Google Scholar] [CrossRef]
- Takehiro, H.; Kakuji, O.; Shinsuke, M. Direct Measurement of Wall-Shear Stress of Plane Shear Layer with Plasma Synthetic Jet Actuator. J. Fluid Sci. Technol. 2009, 4, 75–83. [Google Scholar]
- Ricchiuto, A.C.; Borghi, C.A.; Cristofolini, A.G.; Neretti, G. Measurement of the charge distribution deposited on a target surface by an annular plasma synthetic jet actuator: Influence of humidity and electric field. J. Electrost. 2020, 107, 103501. [Google Scholar] [CrossRef]
- Zhang, P.F.; Dai, C.F.; Liu, A.B.; Wang, J.J. The effect of actuation frequency on the plasma synthetic jet. Sci. China Tech. Sci. 2011, 54, 2945. [Google Scholar] [CrossRef]
- Wu, S.; Liu, X.; Huang, G.; Liu, C.; Bian, W.; Zhang, C. Influence of high-voltage pulse parameters on the propagation of a plasma synthetic jet. Plasma Sci. Technol. 2019, 21, 074007. [Google Scholar] [CrossRef]
- Zong, H.H.; Kotsonis, M. Effect of velocity ratio on the interaction between plasma synthetic jets and turbulent cross-flow. J. Fluid Mech. 2019, 865, 928–962. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Tan, H.J.; Huang, H.X.; Sun, S.; He, X.M.; Cheng, L.; Zhuang, Y. Transient flow patterns of multiple plasma synthetic jets under different ambient pressures. Flow Turbul. Combust. 2018, 101, 741–757. [Google Scholar] [CrossRef]
- Zhang, W.; Geng, X.; Shi, Z.W.; Jin, S.L. Study on inner characteristics of plasma synthetic jet actuator and geometric effects. Aerosp. Sci. Technol. 2020, 105, 106044. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, J.L.; Gan, N. Effects of Parameters on Continuously Working Plasma Synthetic Jet. Eng. Appl. Comput. Fluid Mech. 2014, 8, 55–69. [Google Scholar] [CrossRef] [Green Version]
- Sary, G.; Dufour, G.; Rogier, F.; Kourtzanidis, K. Modeling and parametric study of a plasma synthetic jet for flow control. AIAA J. 2014, 52, 1591–1603. [Google Scholar] [CrossRef]
- Haack, S.J.; Taylor, T.M.; Cybyk, B.Z.; Foster, C.H.; Alvi, F.S. Experimental estimation of SparkJet efficiency. In Proceedings of the 42nd AIAA Plasmadynamics and Lasers Conference in Conjunction with the 18th International Conference on MHD Energy Conversion (ICMHD), Honolulu, HI, USA, 27–30 June 2011. [Google Scholar]
- Golbabaei-Asl, M.; Knight, D.; Wilkinson, S. Novel technique to determine SparkJet efficiency. AIAA J. 2015, 53, 501–882. [Google Scholar] [CrossRef]
- Wang, L.; Xia, Z.X.; Luo, Z.B.; Chen, J. Three-electrode plasma synthetic jet actuator for high-speed flow control. AIAA J. 2014, 52, 879–882. [Google Scholar] [CrossRef]
- Neretti, G.; Seri, P.; Taglioli, M.; Shaw, A.; Iza, F.; Borghi, C.A. Geometry optimization of linear and annular plasma synthetic jet actuators. J. Phys. D Appl. Phys. 2017, 50, 015210. [Google Scholar] [CrossRef] [Green Version]
- Caruana, D.; Barricau, P.; Hardy, P. The “plasma synthetic jet” actuator aero-thermodynamic characterization and first flow control applications. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Liu, R.B.; Niu, Z.G.; Wang, M.M.; Hao, M.; Lin, Q. Aerodynamic control of NACA 0021 airfoil model with spark discharge plasma synthetic jets. Sci. China Tech. Sci. 2015, 58, 1949–1955. [Google Scholar] [CrossRef]
- Anderson, K.V.; Knight, D.D. Plasma jet for flight control. AIAA J. 2012, 50, 1855–1872. [Google Scholar] [CrossRef]
- Wang, P.; Shen, C.B. Characteristics of mixing enhancement achieved using a pulsed plasma synthetic jet in a supersonic flow. J. Zhejiang Univ. Sci. A 2019, 20, 701–713. [Google Scholar] [CrossRef]
- Caruana, D.; Barricau, P.; Gleyzes, C. Separation control with plasma synthetic jet actuators. Int. J. Aerodyn. 2013, 3, 71–83. [Google Scholar] [CrossRef]
- Wang, H.Y.; Li, J.; Jin, D.; Tang, M.X.; Wu, Y.; Xiao, L. High-frequency counter-flow plasma synthetic jet actuator and its application in suppression of supersonic flow separation. Acta Astronaut. 2017, 142, 45–56. [Google Scholar] [CrossRef]
- Ogawara, K.; Kojima, R.; Matsumoto, S.J.; Shingin, H. Extremum seeking adaptive separation control on a wing with plasma synthetic jet actuator. J. Fluid Sci. Technol. 2012, 7, 89–99. [Google Scholar] [CrossRef]
- Zong, H.H.; Van, P.T.; Kotsonis, M. Airfoil flow separation control with plasma synthetic jets at moderate Reynolds number. Exp. Fluids 2018, 59, 169. [Google Scholar] [CrossRef] [Green Version]
- Cybyk, B.Z.; Wilkerson, J.; Grossman, K.R. Performance characteristics of the SparkJet flow control actuator. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, OR, USA, 28 June–1 July 2004. [Google Scholar]
- Narayanaswamy, V.; Raja, L.L.; Clemens, N.T. Characterization of a high-frequency pulsed-plasma jet actuator for supersonic flow control. AIAA J. 2010, 48, 297–305. [Google Scholar] [CrossRef] [Green Version]
- Narayanaswamy, V.; Raja, L.L.; Clemens, N.T. Control of unsteadiness of a shock wave/turbulent boundary layer interaction by using a pulsed-plasma-jet actuator. Phys. Fluids 2012, 24, 543. [Google Scholar] [CrossRef] [Green Version]
- Narayanaswamy, V.; Raja, L.L.; Clemens, N.T. Control of a Shock/Boundary-Layer Interaction by using a pulsed-plasma jet actuator. AIAA J. 2012, 50, 246–249. [Google Scholar] [CrossRef]
- Wang, H.Y.; Li, J.; Jin, D.; Dai, H.; Gan, T.; Wu, Y. Effect of a transverse plasma jet on a shock wave induced by a ramp. Chin. J. Aeronaut. 2017, 30, 1854–1865. [Google Scholar] [CrossRef]
- Huang, H.X.; Tan, H.J.; Sun, S.; Zhang, Y.C.; Cheng, L. Transient interaction between plasma jet and supersonic compression ramp flow. Phys. Fluids 2018, 30, 041703. [Google Scholar] [CrossRef]
- Zhou, Y.; Xia, Z.X.; Luo, Z.B.; Wang, L. Effect of three-electrode plasma synthetic jet actuator on shock wave control. Sci. China Technol. Sci. 2017, 60, 150–156. [Google Scholar] [CrossRef]
- Zhou, Y.; Xia, Z.X.; Luo, Z.B.; Wang, L.; Deng, X.; Zhang, Q.H.; Yang, S.K. Characterization of three-electrode SparkJet actuator for hypersonic flow control. AIAA J. 2019, 57, 879–885. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, Y.; Xia, Z.; Wang, Q.; Huang, X. Multi-resolution analysis of density fluctuation of coherent structures about supersonic flow over vg. Chin. J. Aeronaut. 2012, 2, 173–181. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Mach number | 3 | - |
| Velocity | 622.5 | m/s |
| Sound velocity | 207.5 | m/s |
| Total temperature | 300 | K |
| Static temperature | 107.1 | K |
| Total pressure | 101 | kPa |
| Static pressure | 2.8 | kPa |
| Density | 0.0983 | kg/m3 |
| Viscosity coefficient | 7.43 × 10−6 | Ns/m2 |
| Unit Reynolds number | 7.49 × 106 | 1/m |
| Running time | >20 | s |
| Parameters | Discharge Capacitance | Exit Diameter | Ramp Distance | Ramp Angle |
|---|---|---|---|---|
| Case1 | 640 nF | 5 mm | 50 mm | 60° |
| Case2 | 320 nF | 5 mm | 50 mm | 60° |
| Case3 | 80 nF | 5 mm | 50 mm | 60° |
| Case4 | 640 nF | 1.5 mm | 75 mm | 90° |
| Case5 | 640 nF | 5 mm | 75 mm | 90° |
| Case6 | 640 nF | 11 mm | 75 mm | 90° |
| Case7 | 640 nF | 5 mm | 15 mm | 90° |
| Case8 | 640 nF | 5 mm | 30 mm | 60° |
| Case9 | 640 nF | 5 mm | 70 mm | 60° |
| Case10 | 640 nF | 5 mm | 90 mm | 60° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, W.; Luo, Z.; Zhou, Y.; Wang, L.; Peng, W.; Gao, T. Experimental Study on Ramp Shock Wave Control in Ma3 Supersonic Flow Using Two-Electrode SparkJet Actuator. Processes 2020, 8, 1679. https://doi.org/10.3390/pr8121679
Xie W, Luo Z, Zhou Y, Wang L, Peng W, Gao T. Experimental Study on Ramp Shock Wave Control in Ma3 Supersonic Flow Using Two-Electrode SparkJet Actuator. Processes. 2020; 8(12):1679. https://doi.org/10.3390/pr8121679
Chicago/Turabian StyleXie, Wei, Zhenbing Luo, Yan Zhou, Lin Wang, Wenqiang Peng, and Tianxiang Gao. 2020. "Experimental Study on Ramp Shock Wave Control in Ma3 Supersonic Flow Using Two-Electrode SparkJet Actuator" Processes 8, no. 12: 1679. https://doi.org/10.3390/pr8121679
APA StyleXie, W., Luo, Z., Zhou, Y., Wang, L., Peng, W., & Gao, T. (2020). Experimental Study on Ramp Shock Wave Control in Ma3 Supersonic Flow Using Two-Electrode SparkJet Actuator. Processes, 8(12), 1679. https://doi.org/10.3390/pr8121679