Detection of Drivers’ Anxiety Invoked by Driving Situations Using Multimodal Biosignals





Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants and Stimuli
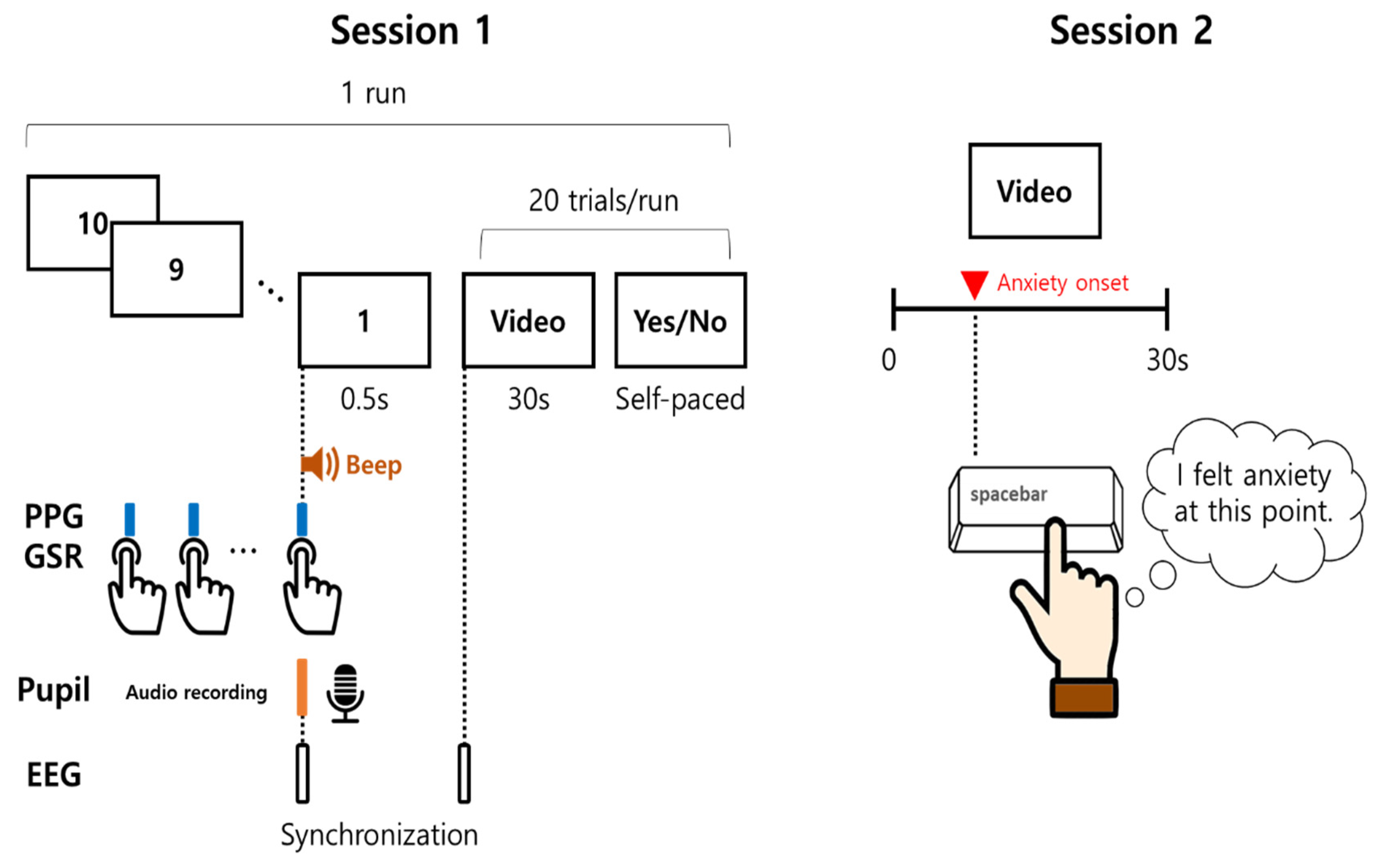
2.2. Experimental Task
2.3. Multimodal Biosignal Recordings
2.4. Behavior Analysis
2.5. Signal Processing and Feature Extraction
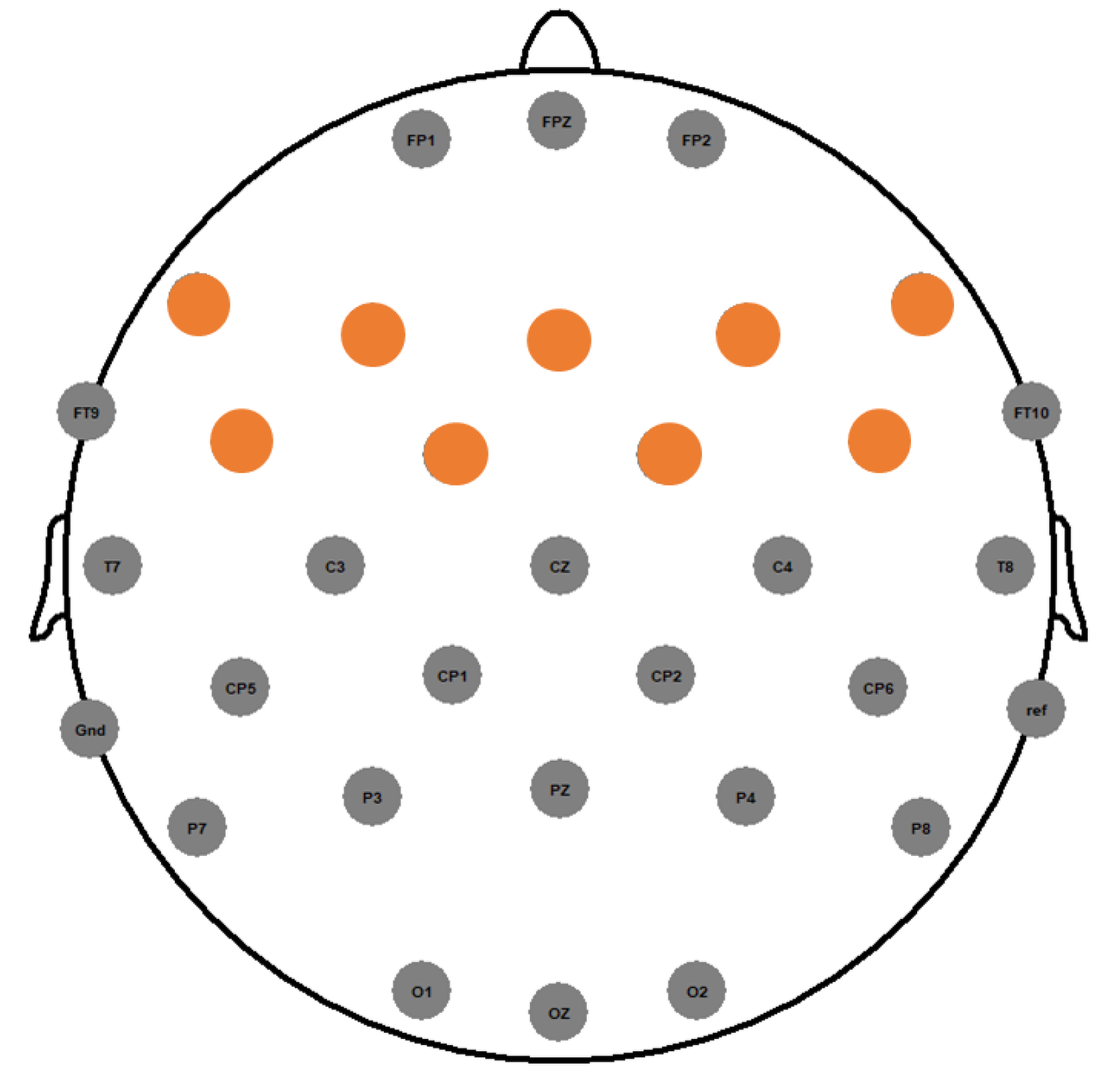
2.5.1. EEG
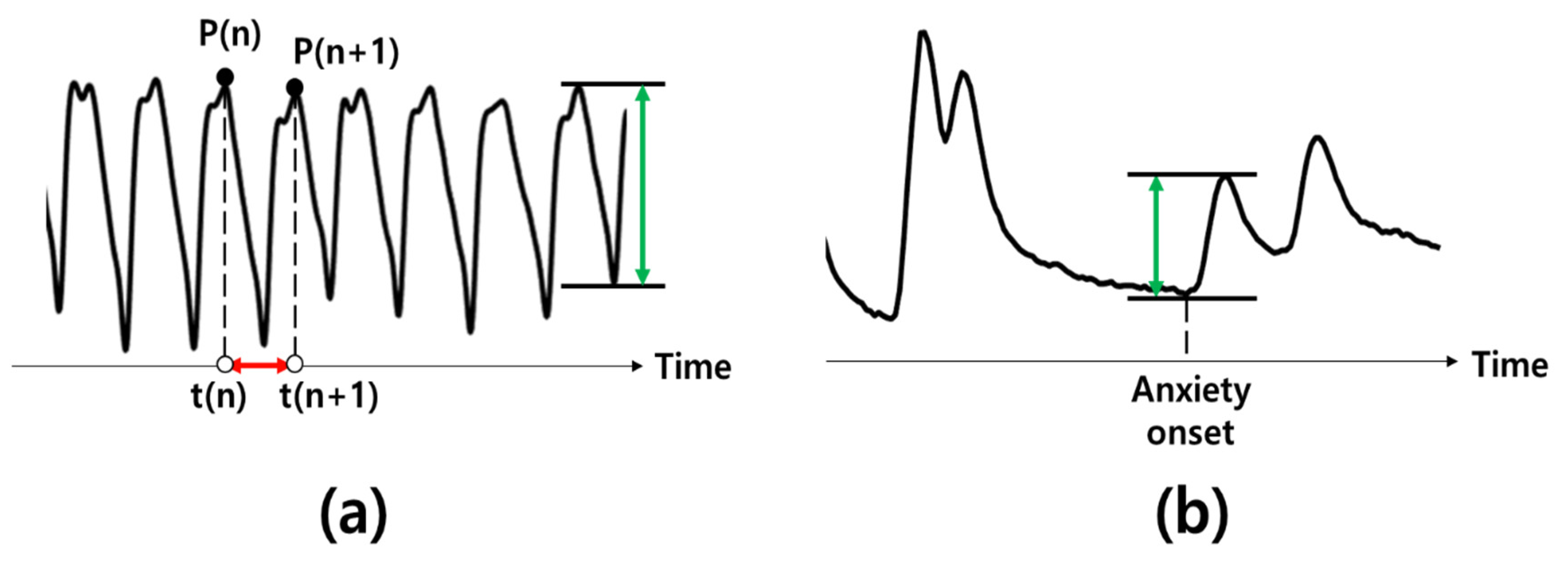
2.5.2. PPG
2.5.3. EDA
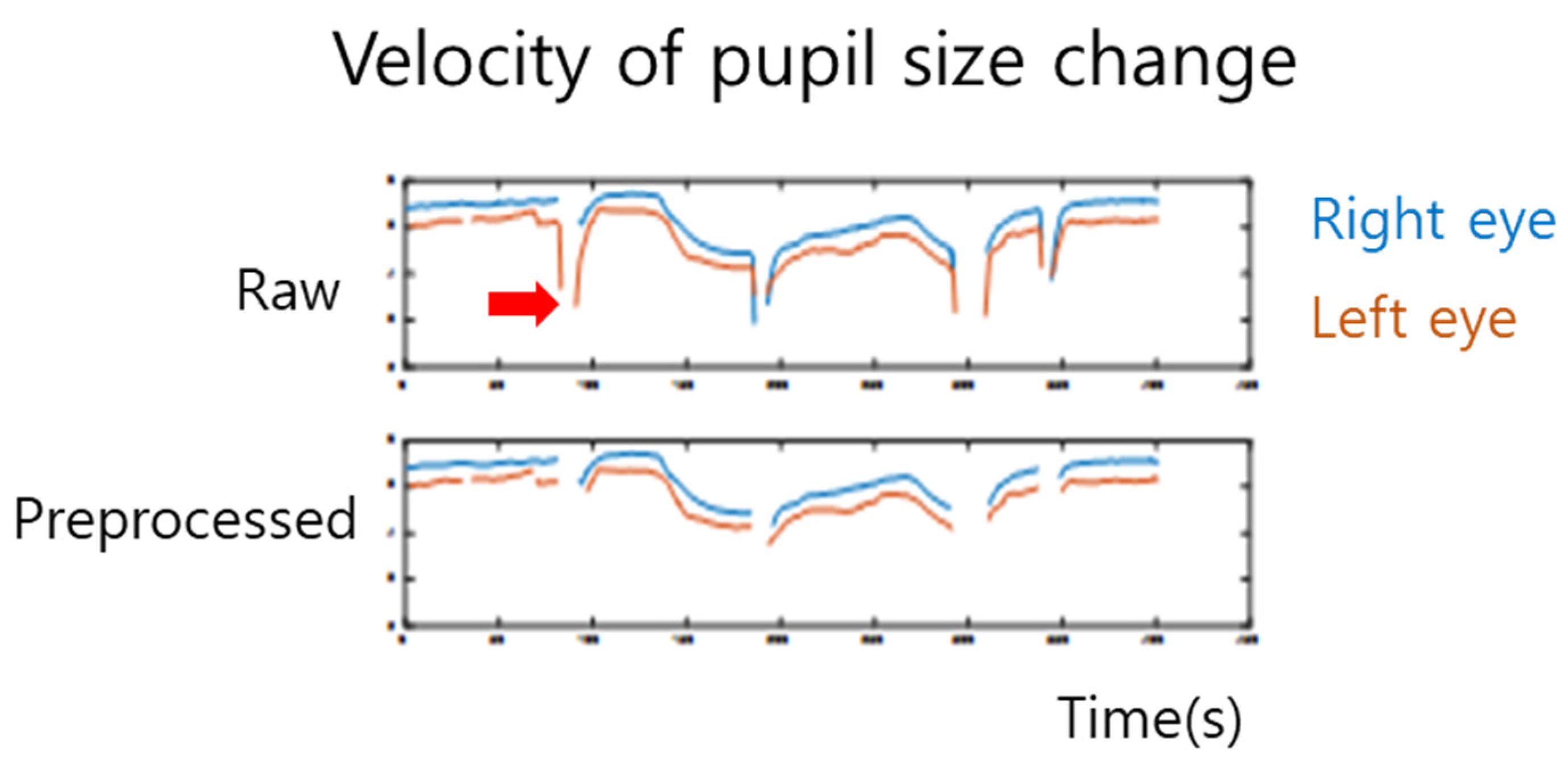
2.5.4. Pupil Size
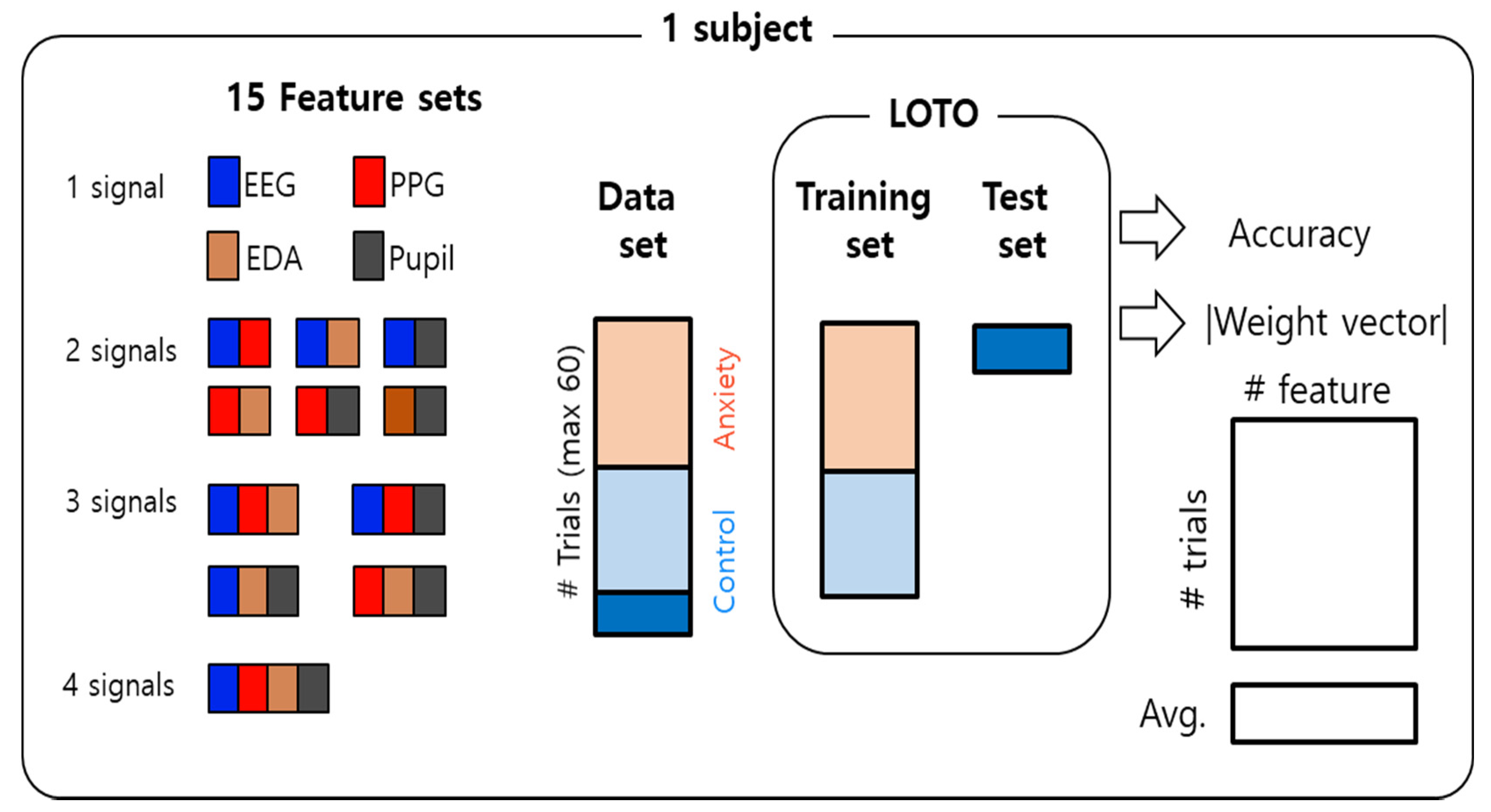
2.6. Decoding Analysis
3. Results
3.1. Behavior Results
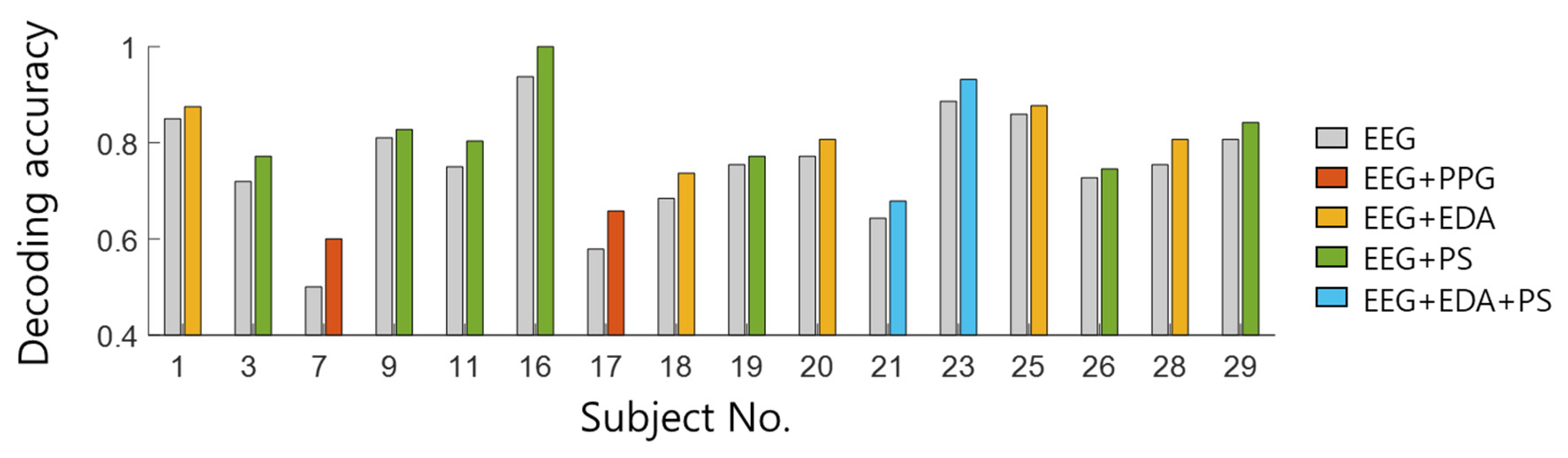
3.2. Decoding Results
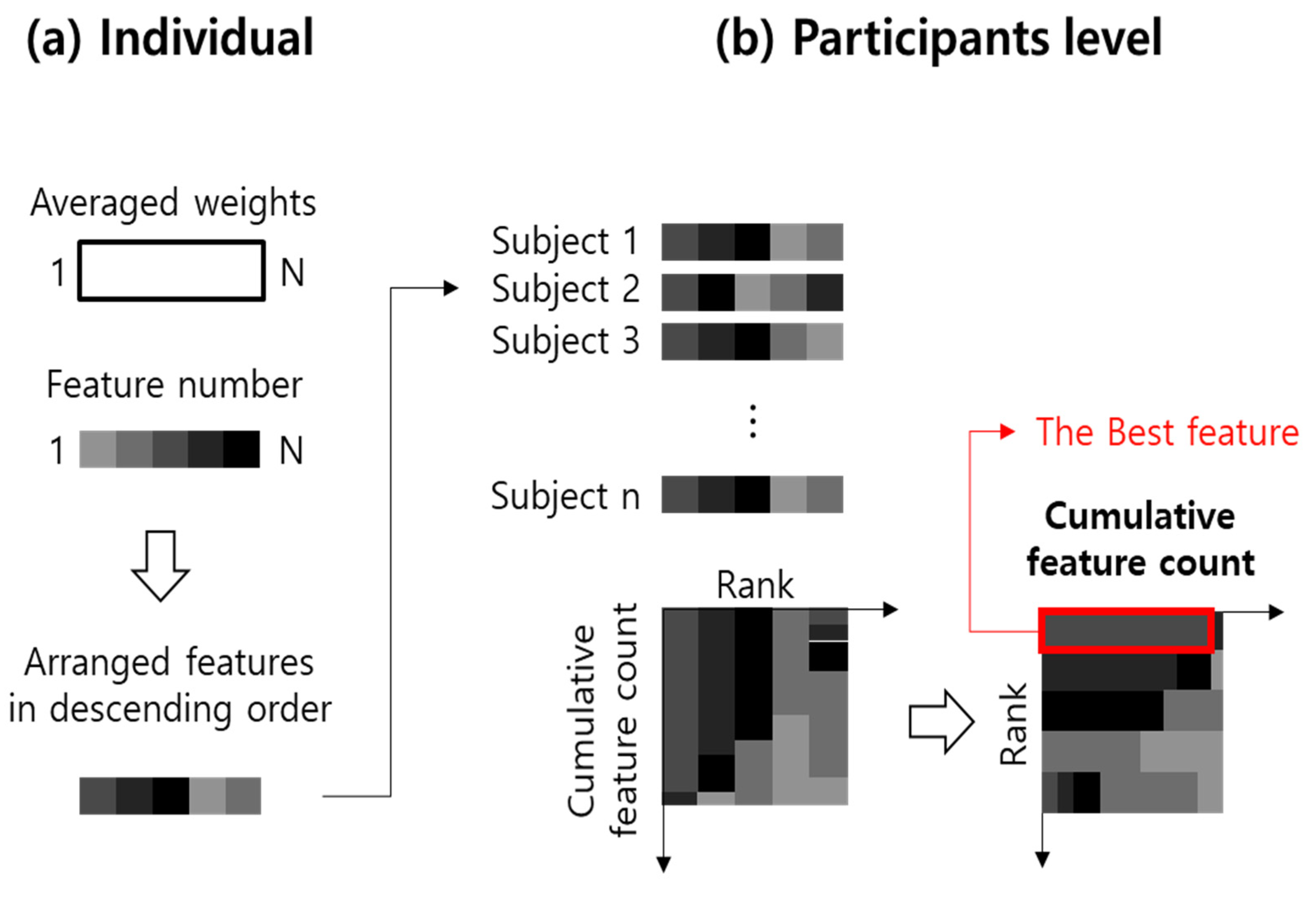
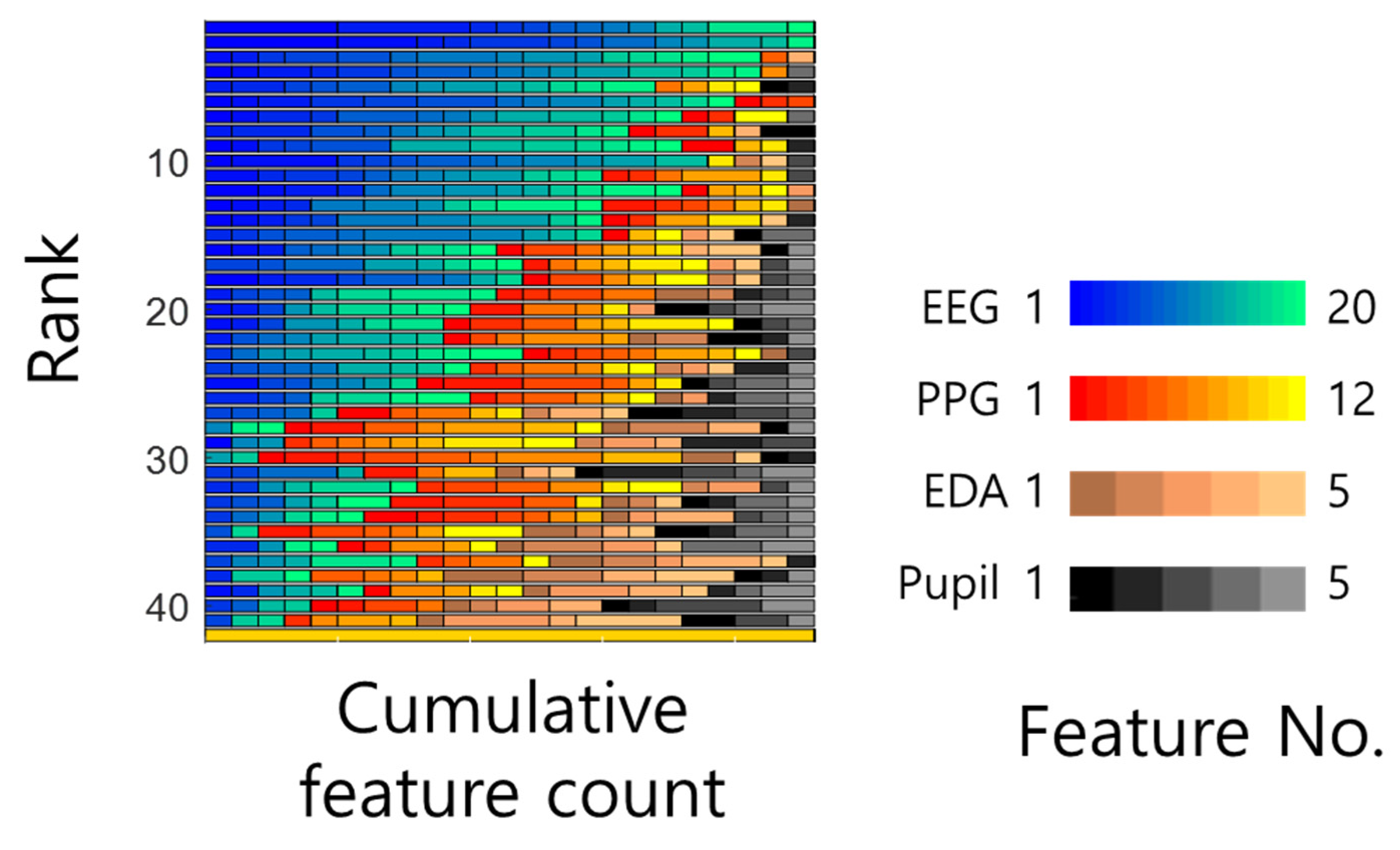
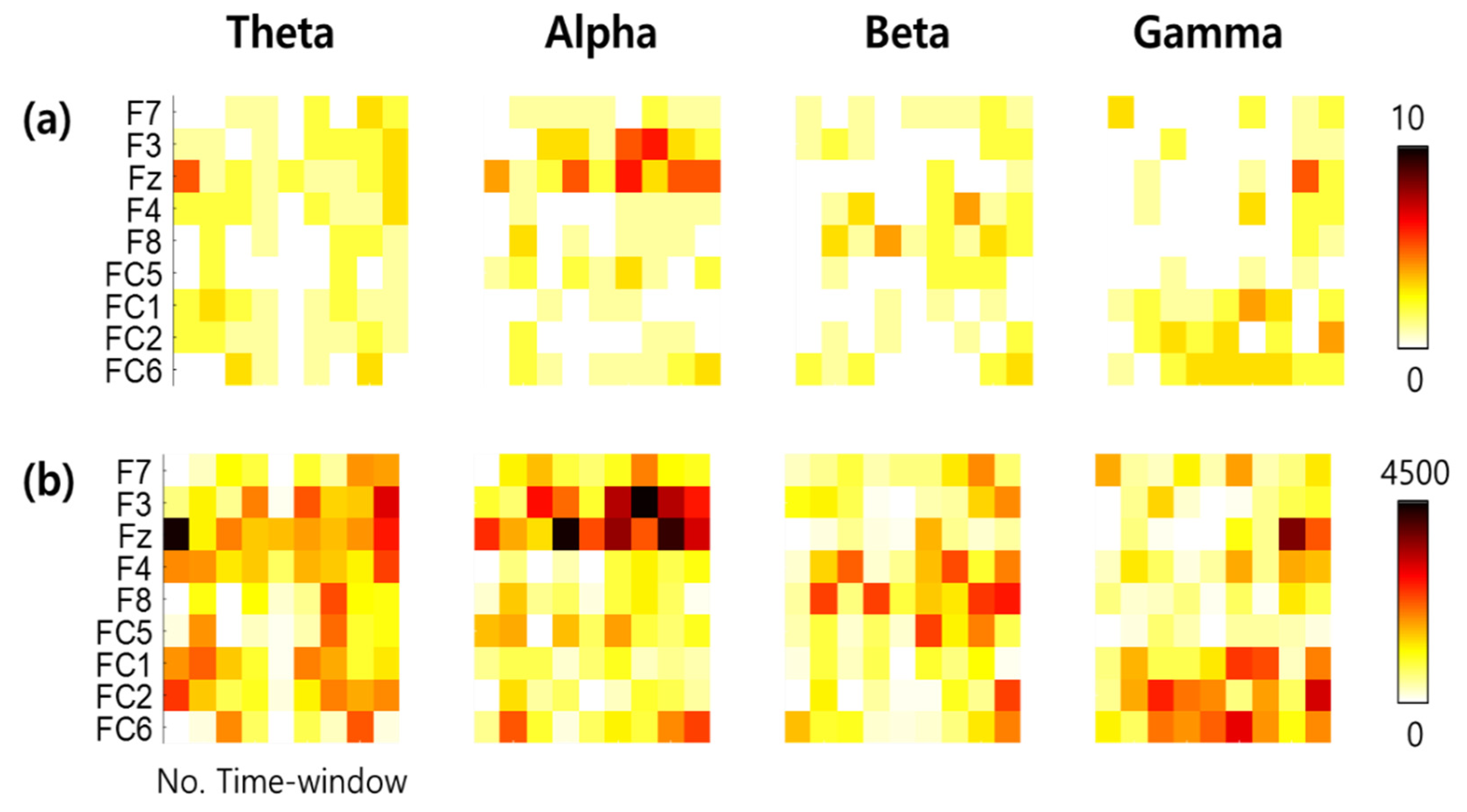
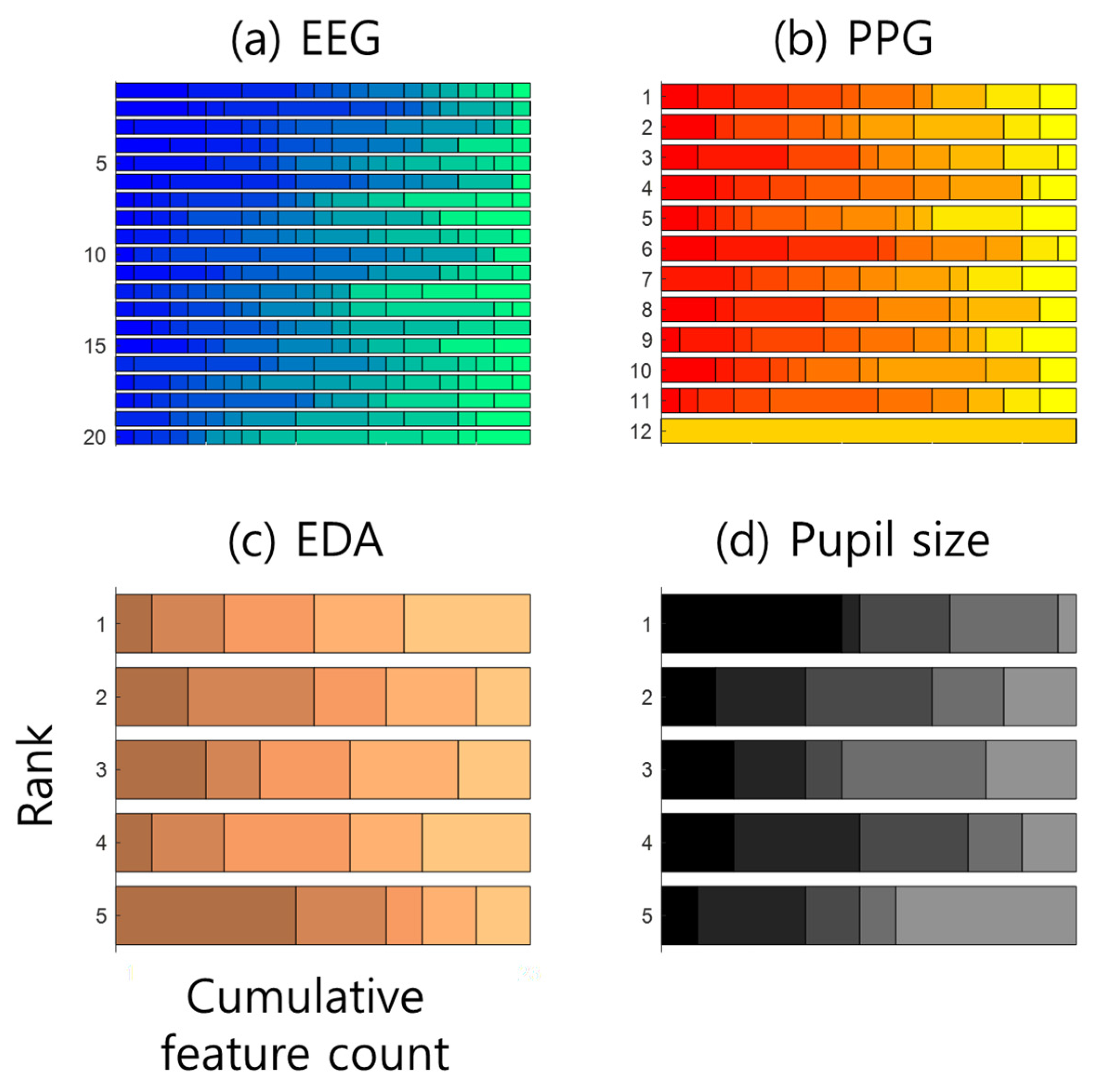
3.3. Selected Features from EEG
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Video No. | Event Start | Event End | Description |
|---|---|---|---|
| 1 | 19 | 21 | Lane change of the front car from left side |
| 2 | 6 | 8 | Lane change of the front car from left side |
| 3 | 16 | 19 | Jaywalking from left side |
| 4 | 8 | 10 | Jaywalking from left side |
| 5 | 13 | 15 | Jaywalking from left side |
| 6 | 7 | 10 | Jaywalking from left side |
| 7 | 8 | 10 | Jaywalking from right side at night |
| 8 | 11 | 14 | Lane change of the front car from right side at night |
| 9 | 18 | 21 | Jaywalking from left side at night |
| 10 | 10 | 11 | Bicyclist from right side |
| 11 | 23 | 25 | Jaywalking from left side |
| 12 | 12 | 15 | Bicyclist from left side |
| 13 | 13 | 15 | Jaywalking from left side |
| 14 | 22 | 24 | Bicyclist from left side at a high speed |
| 15 | 18 | 20 | Jaywalking from left side at night |
| 16 | 19 | 21 | Pedestrian from left side |
| 17 | 16 | 18 | Wheelchair jaywalking from right side at the corner |
| 18 | 8 | 10 | Fast jaywalking from right side |
| 19 | 22 | 27 | Bus at the front changing lane from right side |
| 20 | 17 | 19 | Large vehicle passing by left side at night |
| 21 | 18 | 21 | Large vehicle at the front trying to change lane from left side |
| 22 | 18 | 21 | Large vehicle at the front trying to change lane from left side |
| 23 | 7 | 13 | Large vehicle at the front trying to change lane from right side |
| 24 | 1 | 6 | A sudden stop of a car at the front |
| 25 | 8 | 13 | The entrance of a bottleneck |
| 26 | 13 | 18 | Lane change of the front car from left side |
| 27 | 6 | 9 | Facing a car driving in reverse lane |
| 28 | 8 | 12 | Lane change of the front car from right side |
| 29 | 13 | 15 | Facing a car driving in reverse lane |
| 30 | 4 | 7 | Lane change of the front car from right side |
Appendix B
| Feature Set No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Subject 1 | 0.8500 | 0.6750 | 0.1000 | 0.1750 | 0.7750 | 0.8750 | 0.7250 | 0.5750 | 0.6500 | 0.1250 | 0.7500 | 0.7250 | 0.7000 | 0.6000 | 0.7250 |
| Subject 2 | 0.7636 | 0.5818 | 0.4545 | 0.5636 | 0.6545 | 0.7636 | 0.6727 | 0.5273 | 0.5455 | 0.5091 | 0.6727 | 0.6545 | 0.6727 | 0.5273 | 0.6000 |
| Subject 3 | 0.7193 | 0.3684 | 0.2807 | 0.4211 | 0.7544 | 0.7368 | 0.7719 | 0.3333 | 0.4561 | 0.3860 | 0.7193 | 0.7193 | 0.7368 | 0.4035 | 0.6842 |
| Subject 4 | 0.8246 | 0.4912 | 0.5263 | 0.4561 | 0.7193 | 0.8246 | 0.8246 | 0.4737 | 0.5263 | 0.3684 | 0.7018 | 0.7719 | 0.7895 | 0.4912 | 0.7719 |
| Subject 5 | 0.7797 | 0.3220 | 0.4576 | 0.1186 | 0.7288 | 0.7797 | 0.7458 | 0.2881 | 0.3729 | 0.1017 | 0.6949 | 0.6949 | 0.7288 | 0.3559 | 0.6780 |
| Subject 6 | 0.8372 | 0.5814 | 0.5349 | 0.4884 | 0.7442 | 0.8372 | 0.7674 | 0.6047 | 0.4419 | 0.3953 | 0.7674 | 0.6744 | 0.7907 | 0.4419 | 0.7674 |
| Subject 7 | 0.5000 | 0.5500 | 0.0000 | 0.3000 | 0.6000 | 0.5500 | 0.4500 | 0.5000 | 0.4000 | 0.4000 | 0.6000 | 0.5000 | 0.4500 | 0.3500 | 0.4500 |
| Subject 9 | 0.8103 | 0.4655 | 0.5172 | 0.3793 | 0.7241 | 0.7414 | 0.8276 | 0.5000 | 0.4655 | 0.4828 | 0.6897 | 0.6724 | 0.7759 | 0.5172 | 0.6724 |
| Subject 10 | 0.7544 | 0.3333 | 0.2807 | 0.2632 | 0.7018 | 0.6842 | 0.7193 | 0.3158 | 0.3333 | 0.3684 | 0.6667 | 0.6842 | 0.6842 | 0.3509 | 0.6842 |
| Subject 11 | 0.7500 | 0.4464 | 0.1429 | 0.4643 | 0.6786 | 0.7500 | 0.8036 | 0.5179 | 0.4464 | 0.4821 | 0.6429 | 0.6964 | 0.7679 | 0.5000 | 0.6786 |
| Subject 16 | 0.9375 | 0.5625 | 0.5625 | 0.5000 | 0.9375 | 0.9375 | 1.0000 | 0.5625 | 0.6250 | 0.7500 | 0.8125 | 1.0000 | 1.0000 | 0.6875 | 0.9375 |
| Subject 17 | 0.5789 | 0.4474 | 0.5789 | 0.4737 | 0.6579 | 0.5789 | 0.5526 | 0.4474 | 0.4211 | 0.5263 | 0.6579 | 0.5526 | 0.5789 | 0.3947 | 0.5526 |
| Subject 18 | 0.6842 | 0.4737 | 0.3684 | 0.4386 | 0.6842 | 0.7368 | 0.6140 | 0.5439 | 0.5263 | 0.4211 | 0.7018 | 0.6667 | 0.6842 | 0.5789 | 0.6842 |
| Subject 19 | 0.7544 | 0.4561 | 0.5263 | 0.4912 | 0.7018 | 0.7018 | 0.7719 | 0.4035 | 0.4386 | 0.5088 | 0.6667 | 0.6842 | 0.7544 | 0.4386 | 0.6667 |
| Subject 20 | 0.7719 | 0.5088 | 0.5439 | 0.4035 | 0.7719 | 0.8070 | 0.8070 | 0.4912 | 0.4561 | 0.4561 | 0.8070 | 0.7368 | 0.8070 | 0.4561 | 0.7368 |
| Subject 21 | 0.6429 | 0.4821 | 0.5714 | 0.5714 | 0.6429 | 0.5893 | 0.5714 | 0.5536 | 0.5536 | 0.6429 | 0.6071 | 0.6786 | 0.6607 | 0.5893 | 0.6786 |
| Subject 23 | 0.8864 | 0.6136 | 0.5000 | 0.4318 | 0.8636 | 0.8864 | 0.9091 | 0.5000 | 0.6364 | 0.3636 | 0.8864 | 0.9318 | 0.8636 | 0.5909 | 0.9318 |
| Subject 24 | 0.7193 | 0.4386 | 0.5088 | 0.3509 | 0.5789 | 0.7018 | 0.6842 | 0.4561 | 0.3684 | 0.4561 | 0.6316 | 0.5789 | 0.6316 | 0.4035 | 0.5088 |
| Subject 25 | 0.8596 | 0.5088 | 0.5088 | 0.5088 | 0.8070 | 0.8772 | 0.8421 | 0.5614 | 0.5614 | 0.4737 | 0.8772 | 0.7719 | 0.8596 | 0.5965 | 0.8421 |
| Subject 26 | 0.7273 | 0.5818 | 0.4182 | 0.5273 | 0.6545 | 0.7273 | 0.7455 | 0.5273 | 0.5273 | 0.4909 | 0.6545 | 0.6364 | 0.7091 | 0.5091 | 0.6545 |
| Subject 27 | 1.0000 | 0.5882 | 0.4706 | 0.5294 | 0.9412 | 1.0000 | 1.0000 | 0.6471 | 0.5294 | 0.4118 | 0.8824 | 0.8824 | 0.9412 | 0.5294 | 0.8824 |
| Subject 28 | 0.7544 | 0.5088 | 0.5789 | 0.4211 | 0.7193 | 0.8070 | 0.7544 | 0.4912 | 0.5088 | 0.4035 | 0.7193 | 0.7544 | 0.7895 | 0.4737 | 0.7368 |
| Subject 29 | 0.8070 | 0.4561 | 0.3509 | 0.5263 | 0.7719 | 0.7719 | 0.8421 | 0.5088 | 0.5263 | 0.4737 | 0.7544 | 0.8421 | 0.8421 | 0.5614 | 0.7895 |
| Feature Set No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg. | LR_LOTO | 0.8335 | 0.6938 | 0.5620 | 0.5347 | 0.6887 | 0.8209 | 0.8321 | 0.6927 | 0.6117 | 0.5898 | 0.7015 | 0.7811 | 0.8100 | 0.6865 | 0.7162 |
| LR_CV | 0.6613 | 0.3925 | 0.1817 | 0.2835 | 0.6110 | 0.6545 | 0.6459 | 0.4038 | 0.4181 | 0.2941 | 0.6033 | 0.6049 | 0.6345 | 0.4269 | 0.5991 | |
| ANN_LOTO | 0.7455 | 0.5404 | 0.4623 | 0.4928 | 0.6597 | 0.7141 | 0.7078 | 0.5099 | 0.5073 | 0.5020 | 0.6562 | 0.6617 | 0.6852 | 0.4932 | 0.6320 | |
| ANN_CV | 0.5908 | 0.4875 | 0.3580 | 0.4448 | 0.5232 | 0.5938 | 0.5525 | 0.4584 | 0.4344 | 0.4250 | 0.4962 | 0.4978 | 0.5554 | 0.4476 | 0.4786 | |
| Max | LR_LOTO | 1.0000 | 1.0000 | 0.7000 | 0.7000 | 0.9500 | 1.0000 | 1.0000 | 1.0000 | 0.7500 | 0.7500 | 0.8864 | 1.0000 | 1.0000 | 1.0000 | 0.9500 |
| LR_CV | 1.0000 | 0.5500 | 0.6000 | 0.5500 | 0.9500 | 0.9500 | 1.0000 | 0.7500 | 0.6100 | 0.7500 | 0.8500 | 1.0000 | 1.0000 | 0.8000 | 0.9500 | |
| ANN_LOTO | 1.0000 | 0.6842 | 0.7000 | 0.6471 | 0.9412 | 0.9375 | 0.9412 | 0.6842 | 0.7000 | 0.7500 | 0.8824 | 0.8824 | 0.8750 | 0.5965 | 0.8824 | |
| ANN_CV | 0.9000 | 0.6500 | 0.6500 | 0.6000 | 0.8500 | 1.0000 | 0.8500 | 0.7000 | 0.6500 | 0.7000 | 0.8500 | 0.9500 | 0.8500 | 0.7000 | 0.8000 | |
| Feature Set No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg. | LR_LOTO | 0.4861 | 0.4808 | 0.3917 | 0.4316 | 0.4974 | 0.4941 | 0.4934 | 0.4828 | 0.4889 | 0.4370 | 0.4980 | 0.4961 | 0.4924 | 0.4936 | 0.5010 |
| LR_CV | 0.4316 | 0.3907 | 0.1619 | 0.2772 | 0.4470 | 0.4423 | 0.4488 | 0.4102 | 0.4051 | 0.3041 | 0.4560 | 0.4627 | 0.4577 | 0.4097 | 0.4646 | |
| ANN_LOTO | 0.5104 | 0.5350 | 0.4530 | 0.4685 | 0.4929 | 0.5267 | 0.5104 | 0.5197 | 0.4791 | 0.5014 | 0.5016 | 0.5026 | 0.5130 | 0.4904 | 0.5031 | |
| ANN_CV | 0.4512 | 0.4780 | 0.3456 | 0.4236 | 0.4441 | 0.4223 | 0.4395 | 0.4309 | 0.4535 | 0.4407 | 0.4459 | 0.4372 | 0.4233 | 0.4101 | 0.4370 | |
| Max | LR_LOTO | 0.6842 | 0.8095 | 0.5652 | 0.6842 | 0.7619 | 0.7632 | 0.7368 | 0.6316 | 0.7143 | 0.6786 | 0.7143 | 0.7619 | 0.7105 | 0.7000 | 0.7000 |
| LR_CV | 0.6083 | 0.7667 | 0.5000 | 0.5500 | 0.7000 | 0.6333 | 0.7083 | 0.7167 | 0.6333 | 0.5000 | 0.7000 | 0.7500 | 0.7167 | 0.6000 | 0.6500 | |
| ANN_LOTO | 0.7000 | 0.7193 | 0.7368 | 0.6140 | 0.7143 | 0.6316 | 0.6842 | 0.7895 | 0.6842 | 0.6842 | 0.6316 | 0.7619 | 0.6607 | 0.6140 | 0.6500 | |
| ANN_CV | 0.7200 | 0.6667 | 0.6000 | 0.6000 | 0.7500 | 0.6550 | 0.6167 | 0.6000 | 0.7000 | 0.6500 | 0.6500 | 0.6150 | 0.5900 | 0.6500 | 0.6000 | |
Appendix C


References
- Eyben, F.; Wöllmer, M.; Poitschke, T.; Schuller, B.; Blaschke, C.; Faerber, B.; Nguyen-Thien, N. Emotion on the Road—Necessity, Acceptance, and Feasibility of Affective Computing in the Car. Adv. Hum.-Comput. Interaction 2010, 2010. [Google Scholar] [CrossRef] [Green Version]
- Chan, M.; Singhal, A. Emotion matters: Implications for distracted driving. Saf. Sci. 2015, 72, 302–309. [Google Scholar] [CrossRef]
- de Groot-Mesken, J. Measuring Emotions in Traffic. In Proceedings of the ESF Congress Towards Safer Road Traffic in Southern Europe, Ankara, Turkey, 31 May–2 June 2001. [Google Scholar]
- Jeon, M.; Walker, B.N.; Gable, T.M. The effects of social interactions with in-vehicle agents on a driver’s anger level, driving performance, situation awareness, and perceived workload. Appl. Ergon. 2015, 50, 185–199. [Google Scholar] [CrossRef]
- Nass, C.; Jonsson, I.-M.; Harris, H.; Reaves, B.; Endo, J.; Brave, S.; Takayama, L. Improving automotive safety by pairing driver emotion and car voice emotion. In CHI ‘05 Extended Abstracts on Human Factors in Computing Systems; ACM: Portland, OR, USA, 2005; pp. 1973–1976. [Google Scholar]
- Alberdi, A.; Aztiria, A.; Basarab, A. Towards an automatic early stress recognition system for office environments based on multimodal measurements: A review. J. Biomed. Inform. 2016, 59, 49–75. [Google Scholar] [CrossRef]
- Giannakakis, G.; Grigoriadis, D.; Giannakaki, K.; Simantiraki, O.; Roniotis, A.; Tsiknakis, M. Review on psychological stress detection using biosignals. IEEE Trans. Affect. Comput. 2019, 1. [Google Scholar] [CrossRef]
- Rigas, G.; Goletsis, Y.; Fotiadis, D.I. Real-Time Driver’s Stress Event Detection. IEEE Trans. Intell. Transp. Syst. 2012, 13, 221–234. [Google Scholar] [CrossRef]
- Singh, R.R.; Conjeti, S.; Banerjee, R. Assessment of Driver Stress from Physiological Signals collected under Real-Time Semi-Urban Driving Scenarios. Int. J. Comput. Intell. Syst. 2014, 7, 909–923. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.-l.; Zhao, Y.; Ye, P.-f.; Zhang, J.; Zou, J.-z. Detecting driving stress in physiological signals based on multimodal feature analysis and kernel classifiers. Expert Syst. Appl. 2017, 85, 279–291. [Google Scholar] [CrossRef]
- Ooi, J.; Ahmad, S.; Ishak, A.; Nisa, K.; Minhad, N.A.; Ali, S.; Yu Zheng, C. Grove: An auxiliary device for sympathetic assessment via EDA measurement of neutral, stress, and anger emotions during simulated driving conditions. Int. J. Med Eng. Inform. 2018, 10, 16. [Google Scholar] [CrossRef]
- Fan, X.; Bi, L.; Chen, Z. Using EEG to Detect Drivers’ Emotion with Bayesian Networks. In Proceedings of the 2010 International Conference on Machine Learning and Cybernetics, Qingdao, China, 11–14 July 2010; pp. 1177–1181. [Google Scholar]
- Healey, J.A.; Picard, R.W. Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Barnard, M.P.; Chapman, P. Are anxiety and fear separable emotions in driving? A laboratory study of behavioural and physiological responses to different driving environments. Accid. Anal. Prev. 2016, 86, 99–107. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Lee, T.; Yang, T.; Seomoon, E.; Yoon, C.; Kim, S.-P. Neural correlates of anxiety induced by environmental events during driving. In Proceedings of the TENCON 2018-2018 IEEE Region 10 Conference, Jeju Island, Korea, 28–31 October 2018. [Google Scholar]
- Taylor, J.; Deane, F.; Podd, J. The Relationship Between Driving Anxiety and Driving Skill: A Review of Human Factors and Anxiety-Performance Theories to Clarify Future Research Needs. N. Z. J. Psychol. 2008, 37, 28–37. [Google Scholar]
- HazardPerceptionTest.net Hazard Perception Tips. Available online: https://hazardperceptiontest.net/hazard-perception-tips/ (accessed on 9 November 2019).
- Chang, C.; Hsu, S.; Pion-Tonachini, L.; Jung, T. Evaluation of Artifact Subspace Reconstruction for Automatic EEG Artifact Removal. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 1242–1245. [Google Scholar]
- Aftanas, L.I.; Pavlov, S.V.; Reva, N.V.; Varlamov, A.A. Trait anxiety impact on the EEG theta band power changes during appraisal of threatening and pleasant visual stimuli. Int. J. Psychophysiol. 2003, 50, 205–212. [Google Scholar] [CrossRef]
- Giannakakis, G.; Grigoriadis, D.; Tsiknakis, M. Detection of stress/anxiety state from EEG features during video watching. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 6034–6037. [Google Scholar]
- Yeo, H.-S.; Lee, J.-W.; Yoon, G.-W.; Hwang, H.-T. Method and Apparatus for Evaluating Human Stress Using Photoplethysmography. U.S. Patent 7613486, 3 November 2009. [Google Scholar]
- Boucsein, W. Electrodermal Acitivity, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Partala, T.; Surakka, V. Pupil size variation as an indication of affective processing. Int. J. Hum.-Comput. Stud. 2003, 59, 185–198. [Google Scholar] [CrossRef]
- Klingner, J.; Kumar, R.; Hanrahan, P. Measuring the task-evoked pupillary response with a remote eye tracker. In Proceedings of the 2008 Symposium on Eye Tracking Research & Applications, Savannah, GA, USA, 26–28 March 2008; ACM: Savannah, GA, USA, 2008; pp. 69–72. [Google Scholar]
- Cavanagh, J.F.; Shackman, A.J. Frontal midline theta reflects anxiety and cognitive control: Meta-analytic evidence. J. Physiol.-Paris 2015, 109, 3–15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bush, G.; Luu, P.; Posner, M.I. Cognitive and emotional influences in anterior cingulate cortex. Trends Cogn. Sci. 2000, 4, 215–222. [Google Scholar] [CrossRef]
- Laukka, S.J.; Järvilehto, T.; Alexandrov, Y.I.; Lindqvist, J. Frontal midline theta related to learning in a simulated driving task. Biol. Psychol. 1995, 40, 313–320. [Google Scholar] [CrossRef]
- Mizuki, Y.; Suetsugi, M.; Ushijima, I.; Yamada, M. Differential effects of dopaminergic drugs on anxiety and arousal in healthy volunteers with high and low anxiety. Prog. Neuro-Psychopharmacol. Biol. Psychiatry 1997, 21, 573–590. [Google Scholar] [CrossRef]
- Ishii, R.; Canuet, L.; Ishihara, T.; Aoki, Y.; Ikeda, S.; Hata, M.; Katsimichas, T.; Gunji, A.; Takahashi, H.; Nakahachi, T.; et al. Frontal midline theta rhythm and gamma power changes during focused attention on mental calculation: An MEG beamformer analysis. Front. Hum. Neurosci. 2014, 8, 406. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nogueira, P.A.; Rodrigues, R.; Oliveira, E.; Nacke, L.E. A Hybrid Approach at Emotional State Detection: Merging Theoretical Models of Emotion with Data-Driven Statistical Classifiers. In Proceedings of the 2013 IEEE/WIC/ACM International Joint Conferences on Web Intelligence (WI) and Intelligent Agent Technologies (IAT), Atlanta, GA, USA, 17–20 November 2013; pp. 253–260. [Google Scholar]
- Sharma, N.; Gedeon, T. Objective measures, sensors and computational techniques for stress recognition and classification: A survey. Comput. Methods Programs Biomed. 2012, 108, 1287–1301. [Google Scholar] [CrossRef] [PubMed]









| No. | Feature | Description |
|---|---|---|
| 1 | PPG amplitude mean | The average of PPG amplitude [0 10] |
| 2 | PPG amplitude std. | The standard deviation of PPG amplitude [0 10] |
| 3 | PPG amplitude max | The maximum amplitude of PPG [0 10] |
| 4 | PPG amplitude min | The minimum amplitude of PPG [0 10] |
| 5 | PPI mean difference | PPG amplitude mean [0 10]—PPG amplitude mean [−10 0] |
| 6 | PPI std. difference | PPG amplitude std. [0 10]—PPG amplitude std. [−10 0] |
| 7 | PPI length difference | Mean PPG length [0 10]—Mean PPG length [−10 0] |
| 8 | PPI irregularity difference | Mean PPG irregularity [0 10]—Mean PPG irregularity [−10 0] |
| 9 | nPPI difference | nPPI [0 10]—nPPI [−10 0] |
| 10 | Fast PPIpost count difference | Fast PPIpost count [0 10]—Fast PPIpost count [−10 0] |
| 11 | LF/HF ratio | The ratio of low frequency (LF: 0.04~0.15 Hz) to high frequency (HF: 0.15~0.4 Hz) [0 10] |
| 12 | PPI coefficient of variation | PPI std. [0 10]/PPI mean [0 10] |
| Stimuli No. | Lambda from Poisson Fitting | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1–10 | 1.103 | 1.034 | 1.000 | 1.000 | 1.138 | 0.828 | 1.000 | 1.276 | 1.103 | 1.345 |
| 11–20 | 1.034 | 1.000 | 0.897 | 1.034 | 1.000 | 1.138 | 1.069 | 1.138 | 0.966 | 0.655 |
| 21–30 | 1.276 | 0.931 | 0.552 | 0.414 | 0.483 | 1.069 | 1.034 | 1.103 | 1.172 | 1.103 |
| No. | Feature Set | Average Accuracy | Maximum Accuracy | # Participants Above Chance Level | # Participants Above Accuracy of EEG |
|---|---|---|---|---|---|
| 1 | EEG | 0.7701 | 1.0000 | 22 | - |
| 2 | PPG | 0.4975 | 0.6750 | 11 | 1 |
| 3 | EDA | 0.4253 | 0.5789 | 11 | 0 |
| 4 | PS | 0.4262 | 0.5714 | 6 | 0 |
| 5 | EEG + PPG | 0.7310 | 0.9412 | 23 | 3 |
| 6 | EEG + EDA | 0.7681 | 1.0000 | 23 | 7 |
| 7 | EEG + PS | 0.7567 | 1.0000 | 22 | 9 |
| 8 | PPG + EDA | 0.4926 | 0.6471 | 11 | 0 |
| 9 | PPG + PS | 0.4920 | 0.6500 | 12 | 0 |
| 10 | EDA + PS | 04347 | 0.7500 | 5 | 0 |
| 11 | EEG + PPG + EDA | 0.7202 | 0.8864 | 23 | 5 |
| 12 | EEG + PPG + PS | 0.7178 | 1.0000 | 22 | 4 |
| 13 | EEG + EDA + PS | 0.7486 | 0.6875 | 22 | 7 |
| 14 | PPG + EDA + PS | 0.4934 | 1.0000 | 11 | 0 |
| 15 | All | 0.7093 | 0.9376 | 22 | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Lee, T.; Yang, T.; Yoon, C.; Kim, S.-P. Detection of Drivers’ Anxiety Invoked by Driving Situations Using Multimodal Biosignals. Processes 2020, 8, 155. https://doi.org/10.3390/pr8020155
Lee S, Lee T, Yang T, Yoon C, Kim S-P. Detection of Drivers’ Anxiety Invoked by Driving Situations Using Multimodal Biosignals. Processes. 2020; 8(2):155. https://doi.org/10.3390/pr8020155
Chicago/Turabian StyleLee, Seungji, Taejun Lee, Taeyang Yang, Changrak Yoon, and Sung-Phil Kim. 2020. "Detection of Drivers’ Anxiety Invoked by Driving Situations Using Multimodal Biosignals" Processes 8, no. 2: 155. https://doi.org/10.3390/pr8020155
APA StyleLee, S., Lee, T., Yang, T., Yoon, C., & Kim, S. -P. (2020). Detection of Drivers’ Anxiety Invoked by Driving Situations Using Multimodal Biosignals. Processes, 8(2), 155. https://doi.org/10.3390/pr8020155