1. Introduction
In spite of all recent advances in control technology, the old proportional-integral-derivative (PID) algorithm is still by far the most widely used in practice due to its simplicity, feasibility, and capacity to control almost all plant types [
1,
2,
3]. However, for many complex processes, especially with overshoot, time delay, non-minimum phase, and/or non-linear characteristics, the PID algorithm cannot achieve good and very good control performances. Also, there is not a simple unified procedure for tuning controller parameters [
4,
5,
6,
7,
8].
According to the IMC principle, an accurate control can be achieved if a suitable model of the process is encapsulated in the control system structure [
9,
10,
11,
12,
13]. Despite their many advantages, the algorithms of the IMC-type have not become a convincing practical alternative to PID algorithm [
14,
15,
16] because there is no simple model structure for all types of process. Over the past 10–20 years, many PID tuning methods have been developed by applying IMC techniques for processes of low order plus time delay [
17,
18,
19]. However, the control performance derived by implementing IMC-based PID algorithms is usually weaker than that obtained by using genuine IMC algorithms (especially for processes with large time delay).
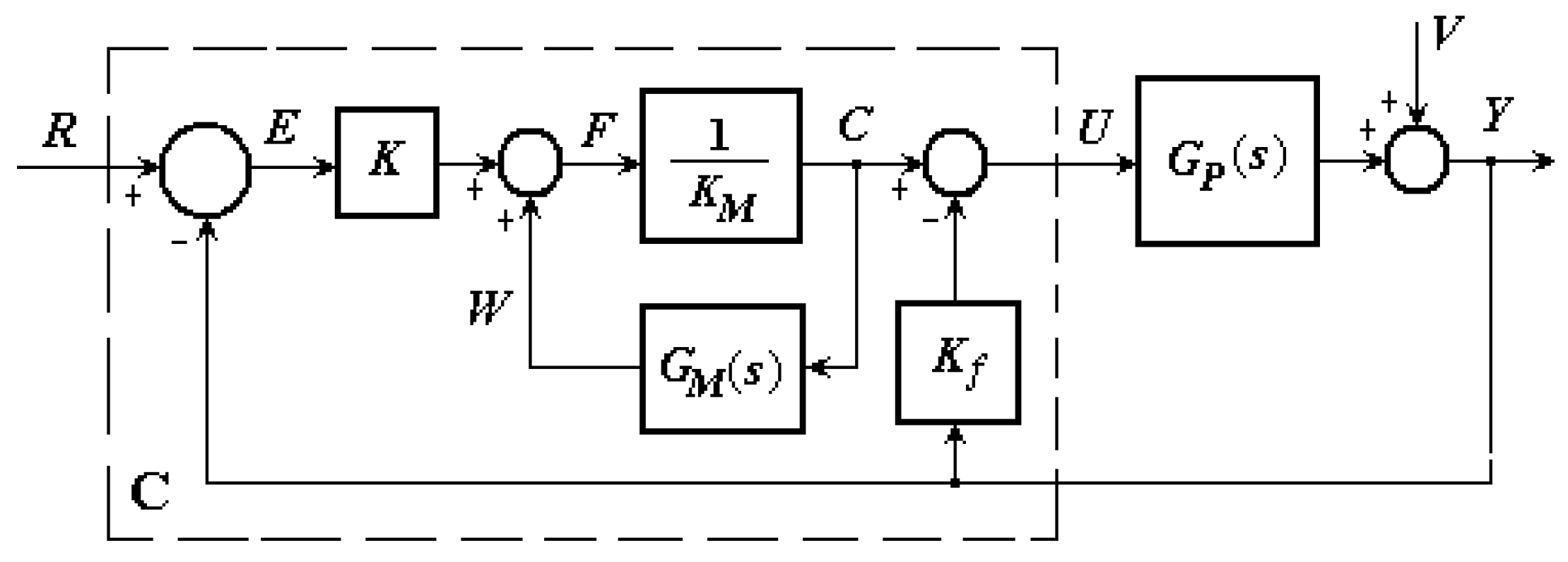
We have presented in 2017 and 2018 two unified control algorithms [
20,
21] of P0-IMC type and P1-IMC type, respectively, whose bloc-diagrams are illustrated in
Figure 1 and
Figure 2, where
is the process transfer function,
is the transfer function of the compensated process model,
is the model steady-state gain,
is the process feedback gain,
K is the tuning gain,
Y is the controlled variable,
R is the setpoint (reference),
E is the error (offset),
U is the control variable,
V is the disturbance, and
C is the internal control variable.
The direct feedback path of the process, characterized by the gain
, is used only for integral and some unstable processes, in order to convert the original process
P into a stable proportional process
P0 (with the gain
bounded and nonzero), called compensated process. The process compensation technique has been firstly used in [
22,
23] for unstable processes, and in [
24] for stable integral processes. For stable proportional processes, the feedback gain
is fixed to zero, so that the compensated process and the original process are one and the same, and the control variables
C and
U are identical. The compensated process models in
Figure 1 and
Figure 2 have, respectively, the transfer functions
and
The algorithms P0-IMC and P1-IMC have five parameters: A tuning parameter
K (with standard value 1), a process feedback gain
(with standard value 0), and three model parameters (steady-state gain
, settling time
, and time delay
). The lag time constants
in models (
1) and (
2) are, respectively, given by
where
is the model settling time.
For both closed-loop control systems, the steady-state error to a step reference or disturbance is zero. In addition, if the process is of integral type, the steady-state error to a ramp disturbance is zero.
Because of the initial sluggishness of the process and process model, the initial value of the control system response
to a unit step setpoint is for both control algorithms
On the other hand, since the steady-state error to a step setpoint is zero, the final value of the control system response
is the reverse of the steady-state gain of the compensated plant:
Therefore, for a compensated process model with
, the initial value of
is
K times its final value:
Since the model of the compensated plant is stable and of proportional type, both algorithms are unified and quasi-universal, in the sense that they have a unique form (as the PID algorithm) and may be used to control almost all industrial plants: Stable plants of proportional type (with or without overshoot, time delay and oscillations, of minimum or non-minimum phase), integral plants, and unstable plants.
The model parameters can be experimentally identified using the compensated plant response to a step input, and can be easily adjusted online. Also, by setting a suitable tuning gain K, the closed-loop control system can have good performance even if the model parameters are not accurately known.
The proposed control algorithm is of P-IMC type, and provides an adequate trade-off between the algorithms P0-IMC and P1-IMC, ensuring a moderate impact of the tuning gain
K on the control action. In most practical applications, it is not desirable to use large values of the gain
K (larger than 10) to avoid an excessive noise amplification and a very sharp-shrill form of the controller output
to a step setpoint or disturbance. The P0-IMC algorithm can lead to such undesirable situations when the parameters of the compensated plant are inaccurately selected (
or
or
) and the tuning gain
K has a weak influence on the control action [
20]. On the contrary, such situations are not possible by using the P1-IMC algorithm, characterized by a strong influence of
K on the control action [
21]. By using the new proposed algorithm, the best control performance is usually obtained for
, and the response
to a step reference is smoother than the response of the first algorithm and sharper than the one of the second algorithm. Also, for
1, the new algorithm preserves the step control principle, which states that “the control response
to a step setpoint is close to a step form if the dynamic model of the compensated plant has a high accuracy”. By a simple analysis of the deviation of the response
from the step function, the model parameters can be suitably adjusted online.
Section 2 presents the theoretical basis of the P-IMC algorithm in continuous and discrete-time, and how it can be used to control stable proportional processes, integral processes, and some unstable processes in a coherent framework. In addition, the conditions for a bumpless transfer between the MANUAL, COMPENSATORY, and AUTOMATIC modes are given in discrete-time.
Section 3 presents an experimental method of identifying the model parameters for all process types. A simple procedure which enables a human operator to verify online if the model parameters have suitable values and to adjust them is given in
Section 4.
Section 5 presents a two-degree of freedom variant of the algorithm. Using MATLAB/SIMULINK environments, some numerical applications are given in
Section 6 to show the control performance, the robustness with respect to parameter uncertainty, and how the algorithm can be implemented to control various types of process. Conclusions and future research are presented in
Section 7.
2. P-IMC Algorithm Design
As mentioned in the previous section, the impact of the tuning gain K on the control action is too weak for the P0-IMC algorithm and too strong for the P1-IMC algorithm. Consequently, a fast control system response to a step setpoint or disturbance is achieved with a control signal too sharp (for K large) and too smooth (for K small), respectively. We show further that the proposed algorithm satisfactorily solves this problem.
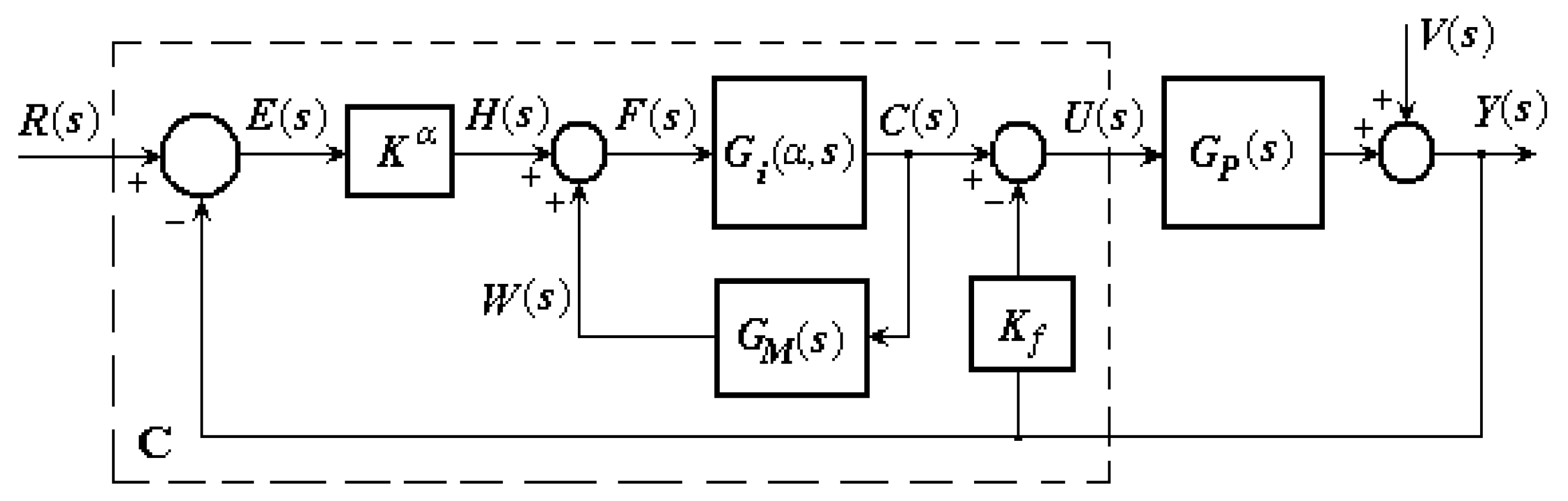
The block diagram of the
-IMC algorithm (or, more simple, P-IMC algorithm) is shown in
Figure 3, where the transfer functions of the compensated process model and internal controller are:
with
The
-IMC algorithm reduces to the first algorithm in
Figure 1 for
and
, and to the second algorithm in
Figure 2 for
and
. By setting
, the internal controller (
8) becomes purely proportional, and all three control algorithms (for
,
, and
) are identical.
The following theorems are valid for a stable closed-loop control system of P-IMC type having the structure in
Figure 3.
Theorem 1. The steady-state error of an asymptotically stable control system with P-IMC controller is zero for any step setpoint or disturbance.
Proof. Since the compensated process is of proportional type, it suffices to prove that the transfer function
between the output
C and the input
E is of integral type (i.e., it has a pole at the origin). This is true because
and
☐
Theorem 2. The initial and final values of the control response of a P-IMC controller to a unit step setpoint does not depend on the weighting coefficient α:In addition, if , then . Proof. Because of the initial sluggishness of the process and model, we have (see
Figure 3)
therefore
On the other hand, according to Theorem 1, we have
, therefore
☐
According to Theorem 2, if and , the initial and final values of the response to a unit step reference are equal to each other, that is . Moreover, the P-IMC algorithm satisfies the step control principle:
Theorem 3. If and the model of the compensated process is perfect, then the control response of a P-IMC controller to a unit step setpoint is a perfect step of magnitude .
Proof. We only need to show that the transfer function
is equal to
. According to (
10), we have
If
and
, then
☐
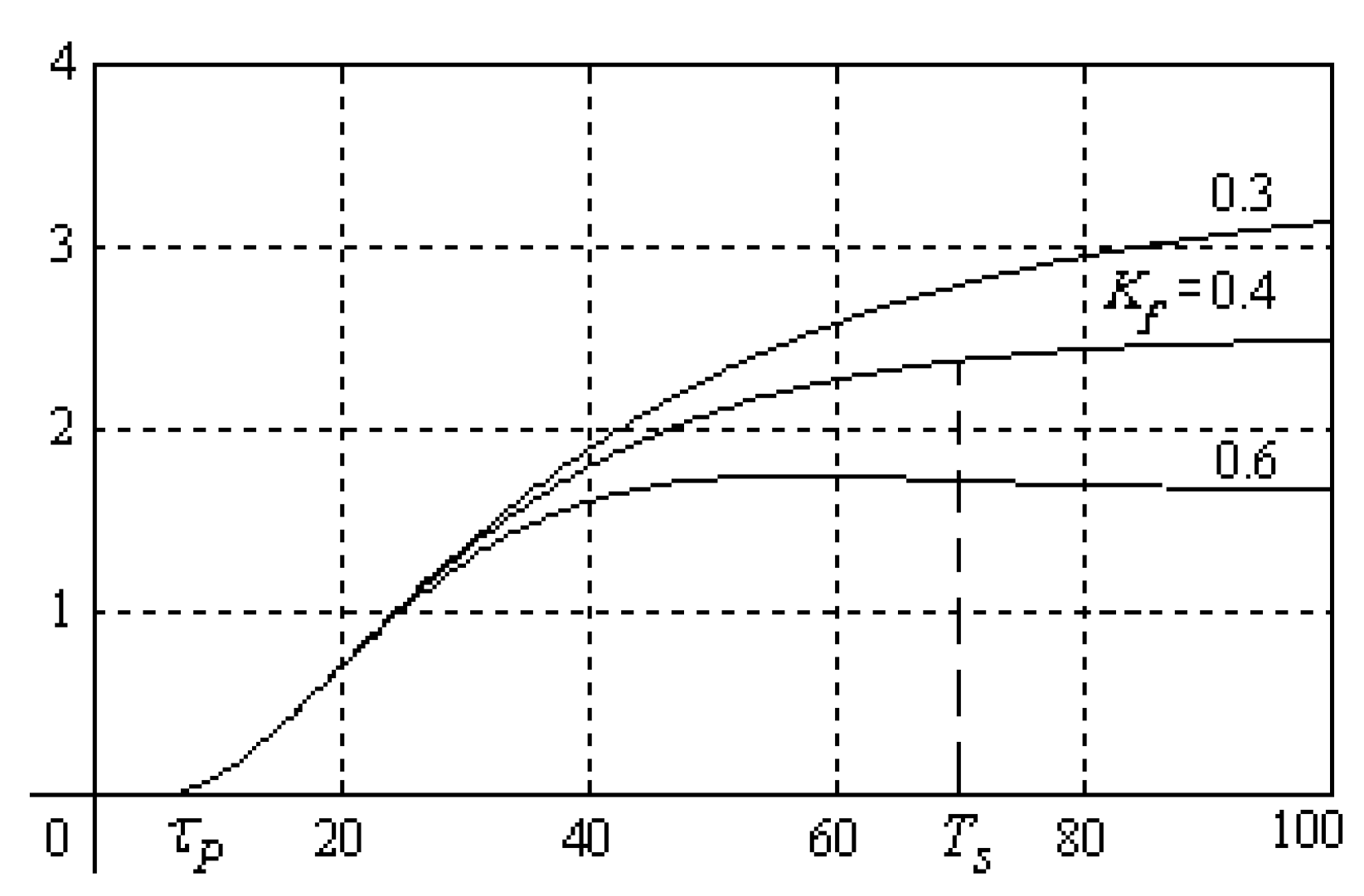
Assume further that the compensated process is of P*-type (proportional and having a monotone and bounded step response) and consider the model (
7) with
For a given
, the parameters of the model (
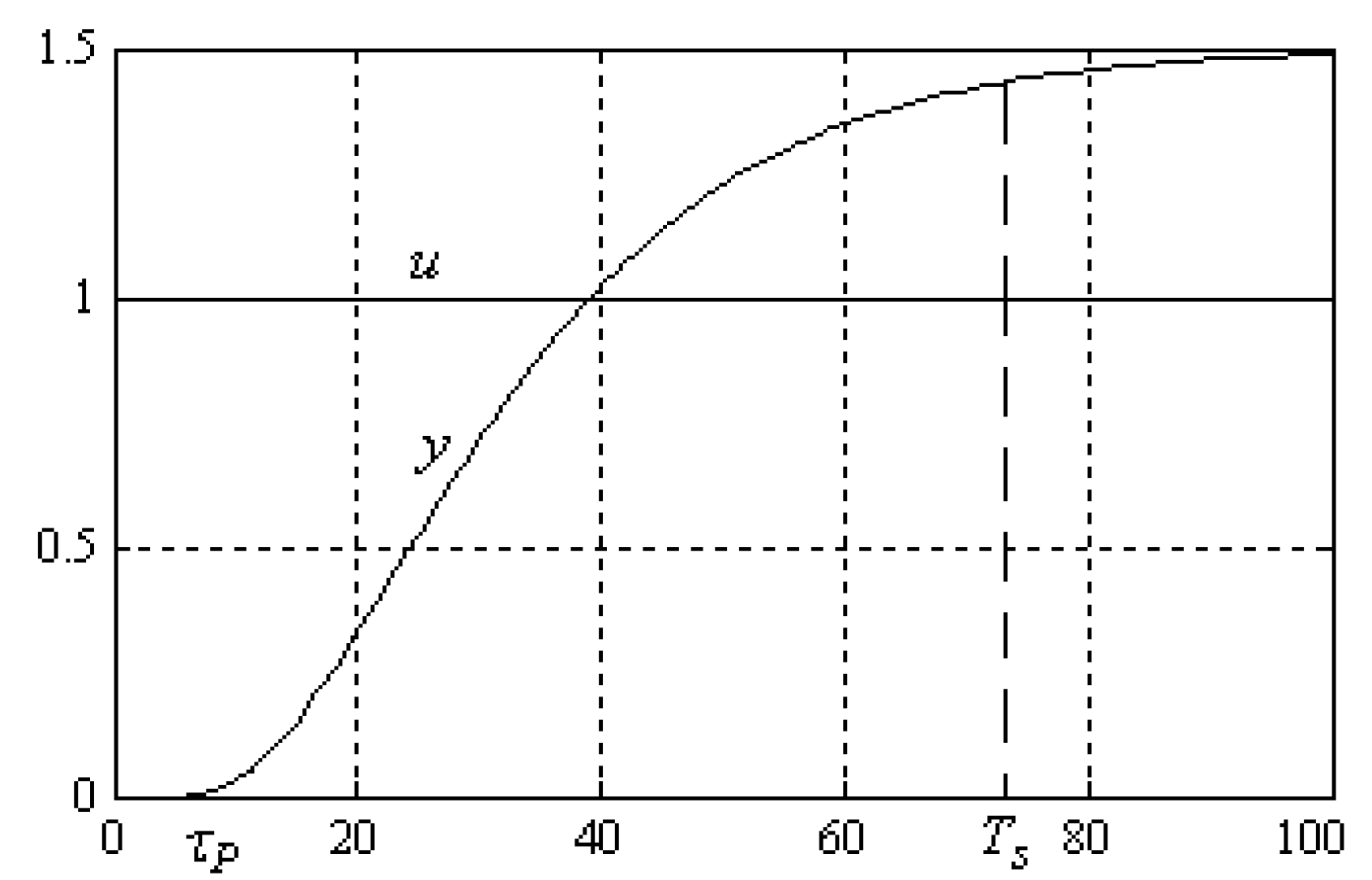
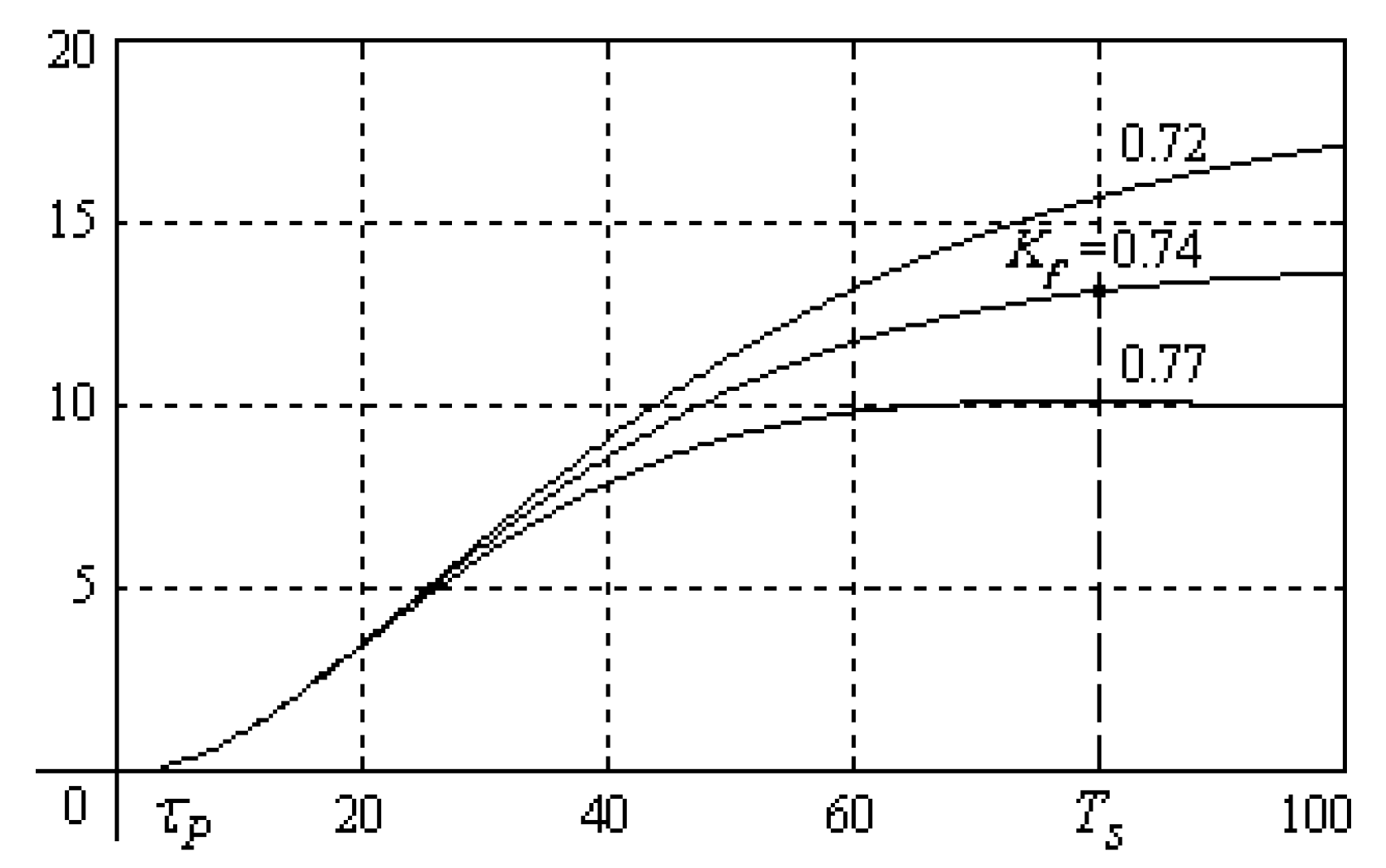
7) can be experimentally determined by using the compensated plant response
to a step input
c, as follows:
where the computed values of the function
are showed in
Table 1, and
is the transient time of the response
(without time delay); more precisely,
where
is the time delay of the compensated plant, and
the settling time of the compensated plant (when the response
y reaches 95% or 98% of its final value).
For practical reasons, we will consider that the parameters of the compensated plant model are
,
, and
. As shown in [
20] for
and in [
21] for
, if the tuning gain
K is suitably selected, then an estimation of the model parameters with an error less than 15% does not significantly diminish the control performance. We claim that this robustness property is also satisfied for
.
To get the discrete-time control algorithm, let us denote by
T the sampling period and by
the integer ratio of the model time delay to the sampling period:
Moreover, let us denote
The discrete-time equivalent of the model (
7) has the approximate transfer function
which leads to the difference equation
Similarly, the discrete-time equivalent of the internal controller (
8) has the approximate transfer function
and the difference equation
From the controller structure in
Figure 3, the difference Equation (
22) of the compensated process model and the difference Equation (
24) of the internal controller, we get the following discrete-time control algorithm:
where
,
, and
are, respectively, the values of
e,
u, and
y before switching to AUTOMATIC mode.
Remark 1. To have a bumpless transfer (without suddenly changing the process input u) for any initial error , the following settings must be made before switching to AUTOMATIC mode:andBy replacing the equationin the discrete-time algorithm (25) witha bumpless transfer is achieved only for . For , the control variables c and u modify to diminish the error as in the case of a step reference of magnitude . For
, the overall controller
C in
Figure 3 has three distinct operating modes: AUTOMATIC, MANUAL, and COMPENSATORY. Note that in MANUAL and COMPENSATORY modes, the human operator can directly change the original process input
u and the compensated process input
c, respectively. Before switching to COMPENSATORY mode, characterized by the equation
and
c need to be automatically initialized to the current values of
y and
u, respectively. For
, the MANUAL and COMPENSATORY modes coincide.
Remark 2. For integral or unstable processes, the model addresses the compensated process. The feedback gain is selected to get a stable proportional compensated process.
Remark 3. For an integral process, the compensated process response to a ramp disturbance v and fixed c (see Figure 3) is bounded. As a result, since the controller with the transfer function given by (10) is of integral type (see the proof of Theorem 1), the steady-state error is zero for a ramp disturbance added to the plant output. Remark 4. In practical applications, due to the process nonlinearities and model inaccuracy, the closed-loop response to a step setpoint is not a perfect step for . By comparing the current response with the step form, the human operator can online check the accuracy of the model parameters and suitably adjust them.
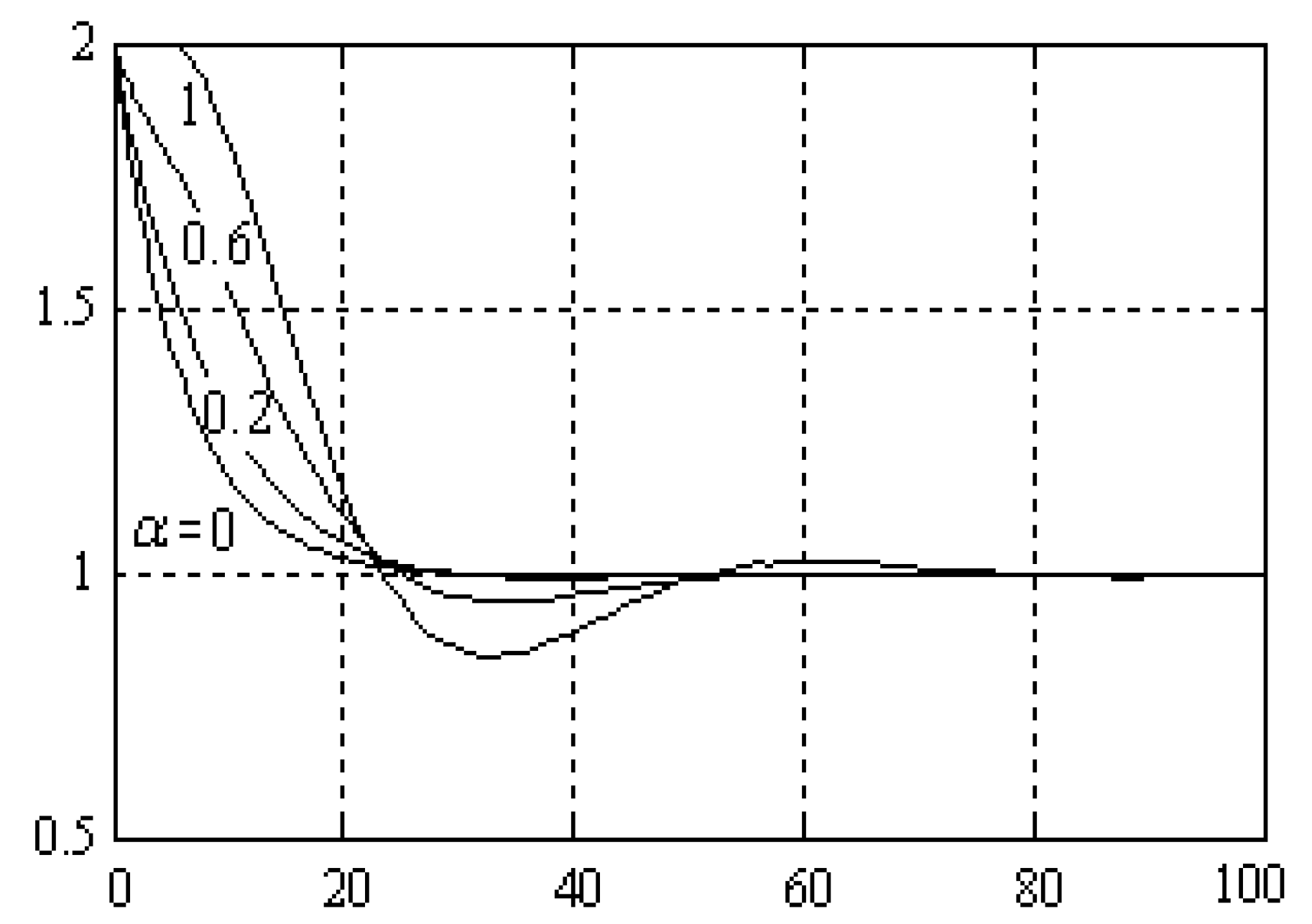
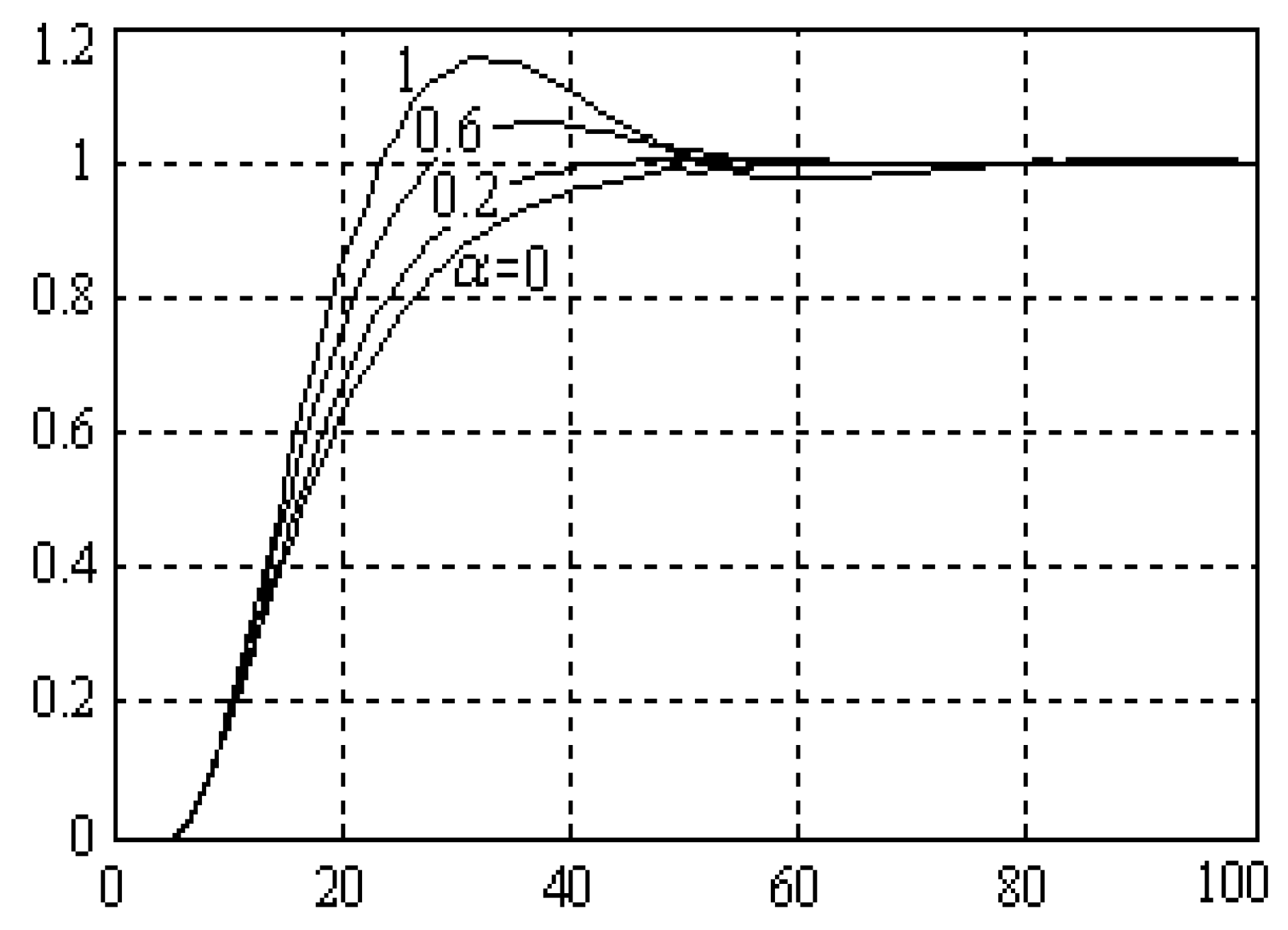
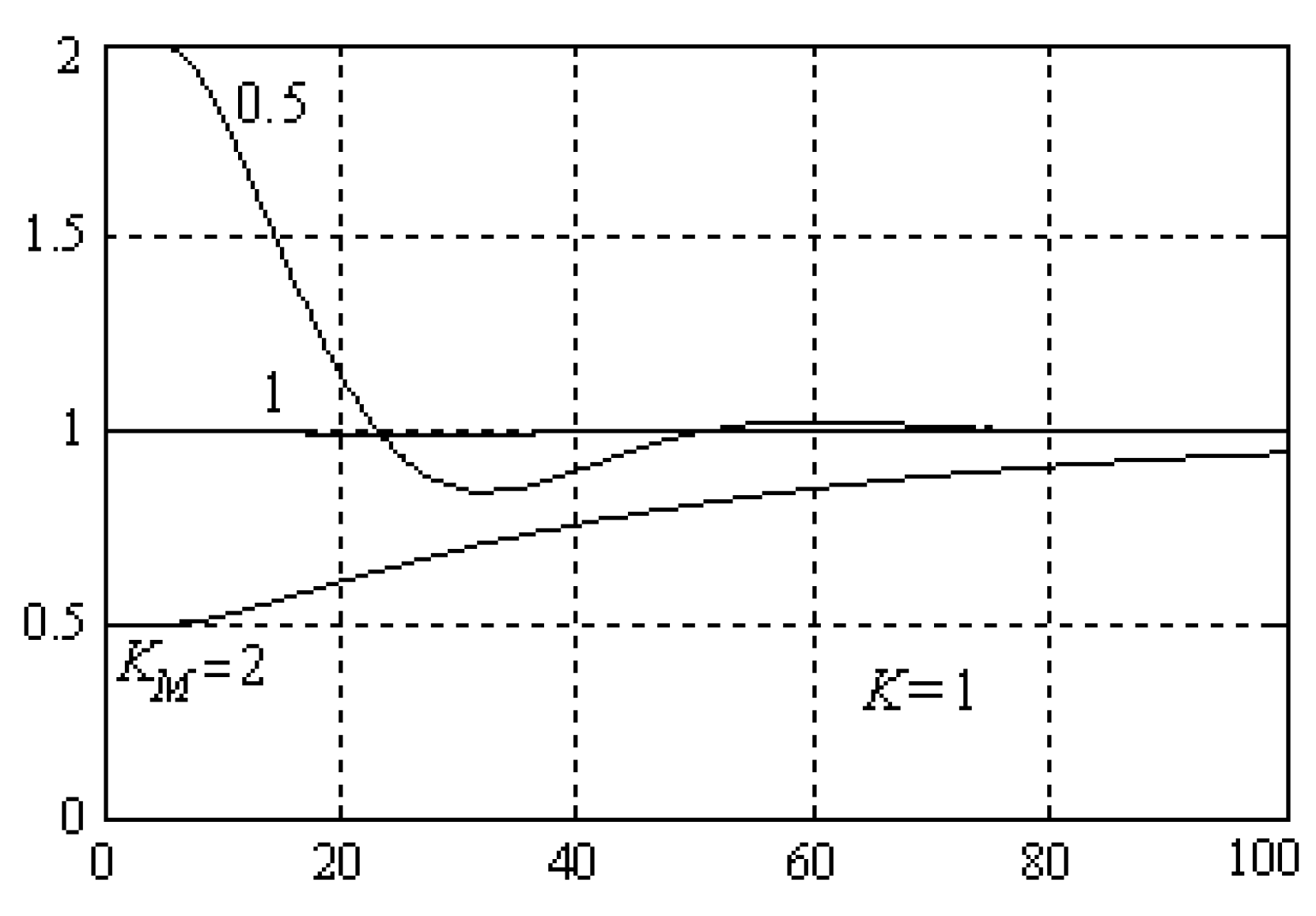
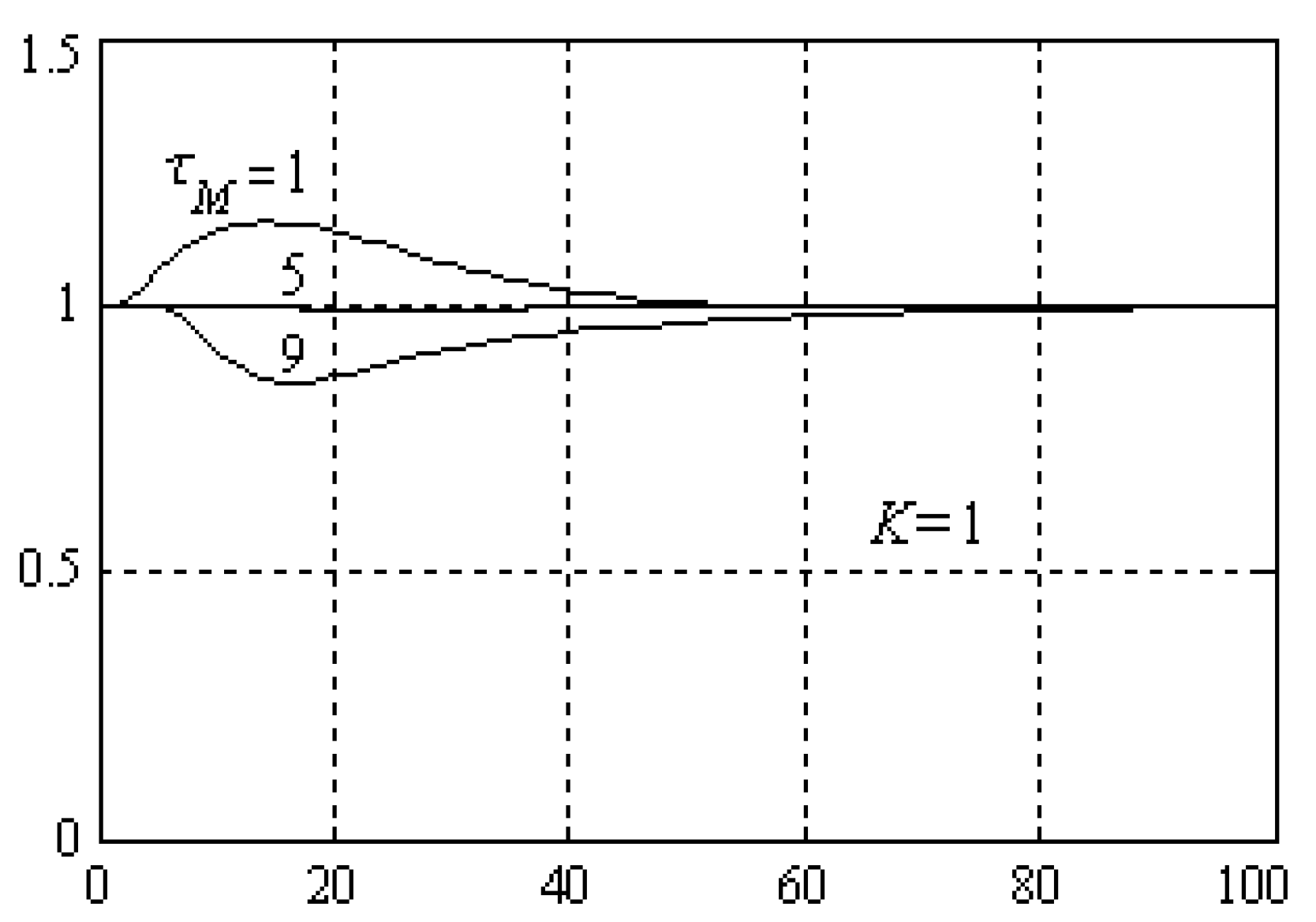
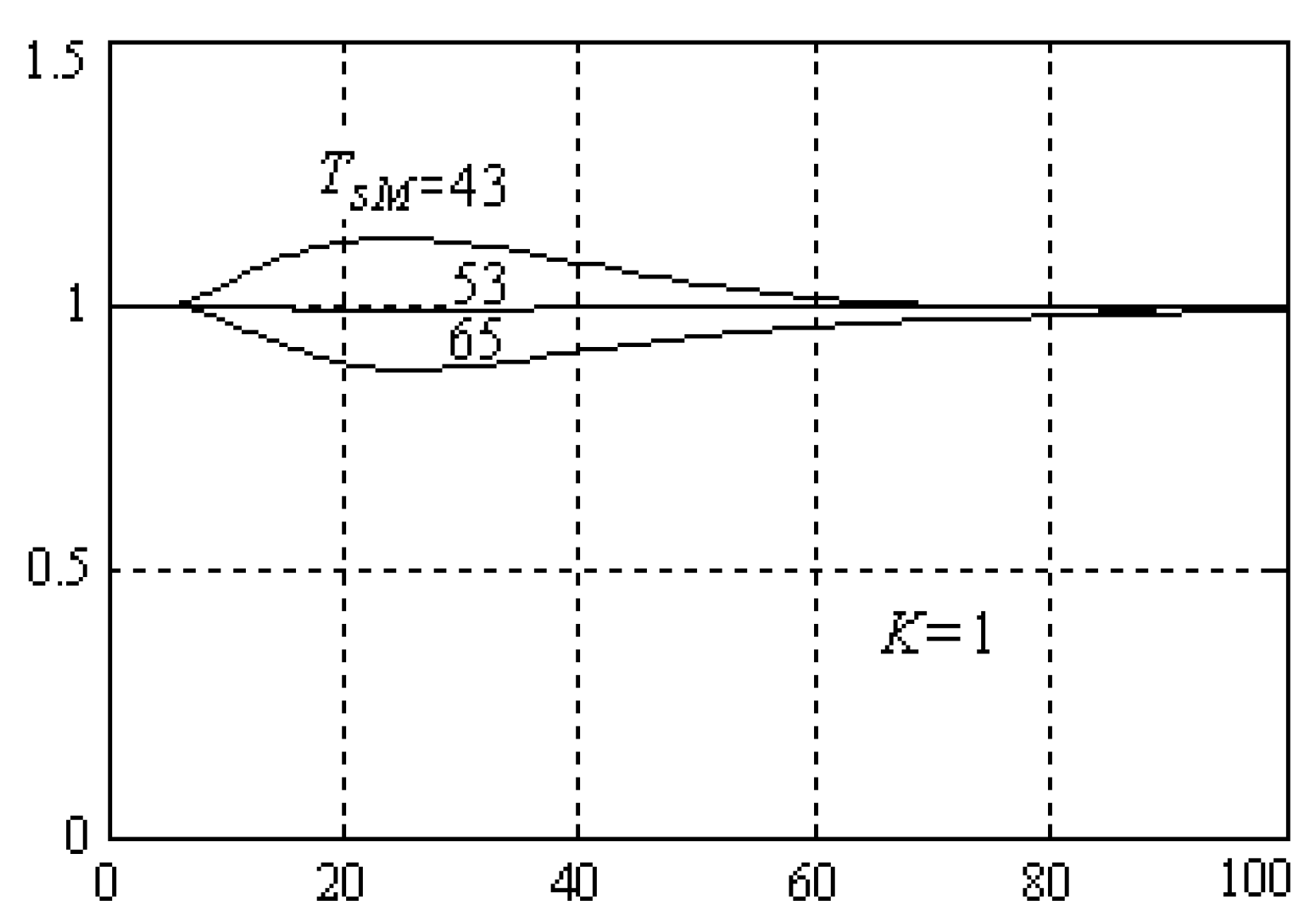
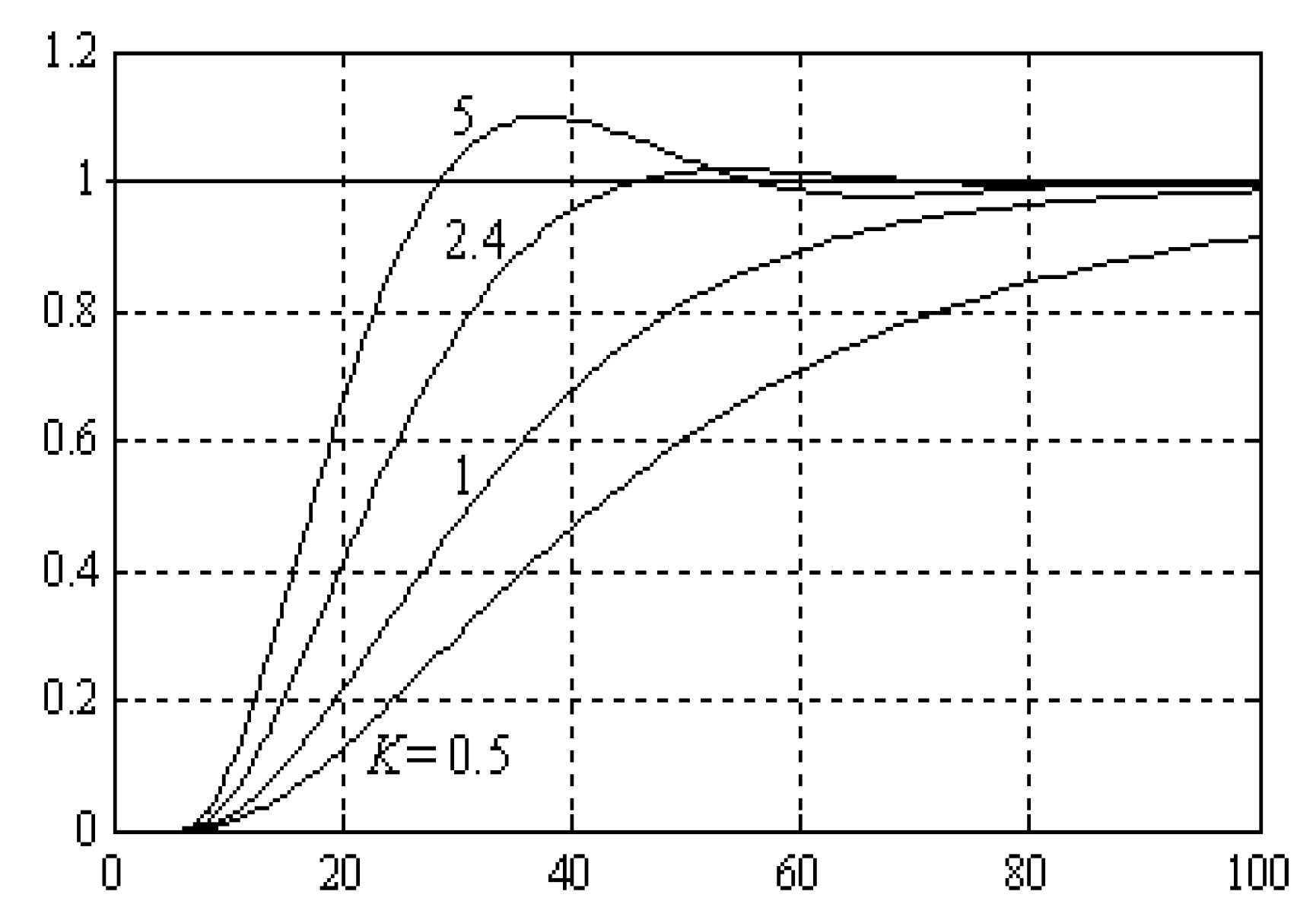
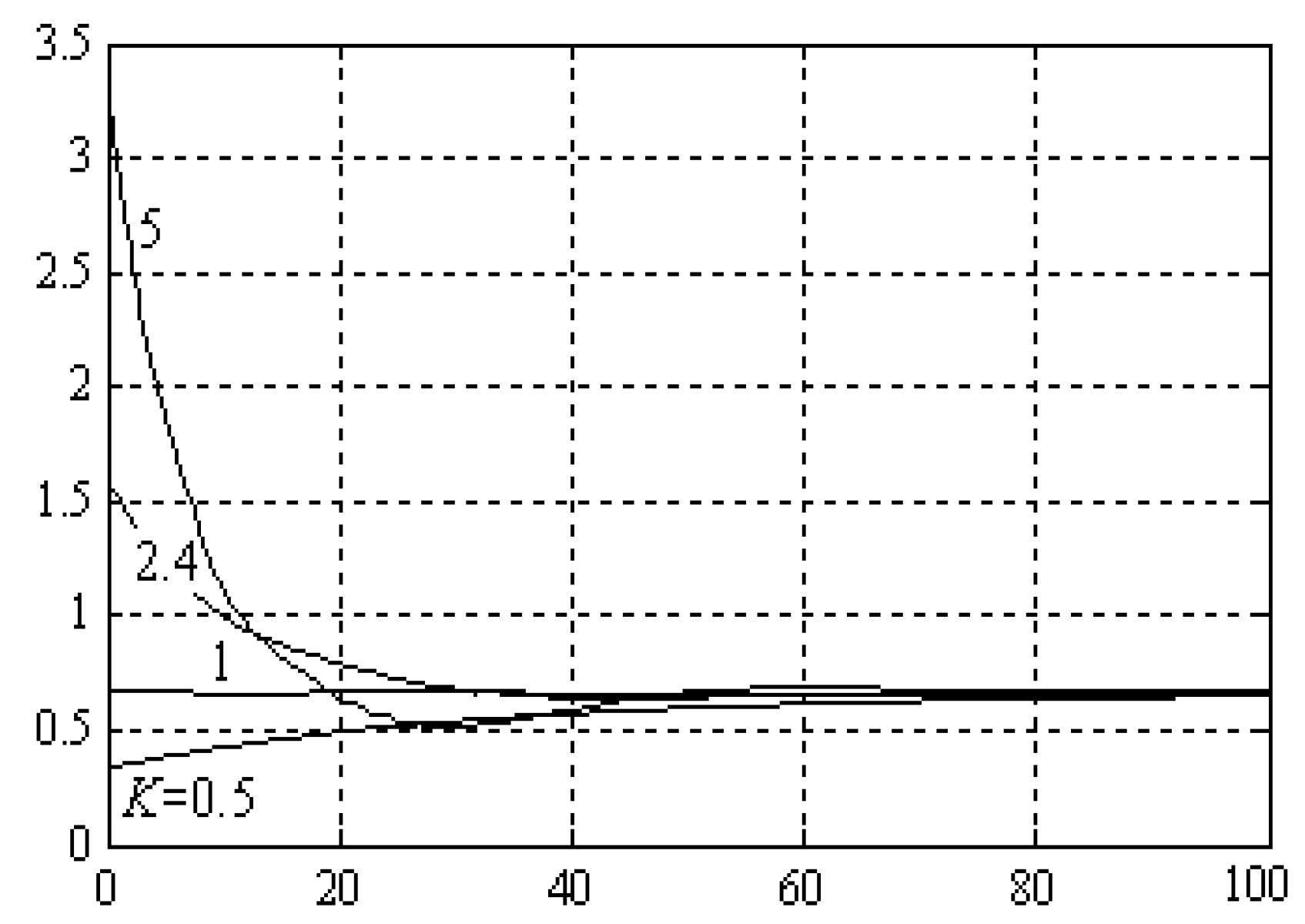
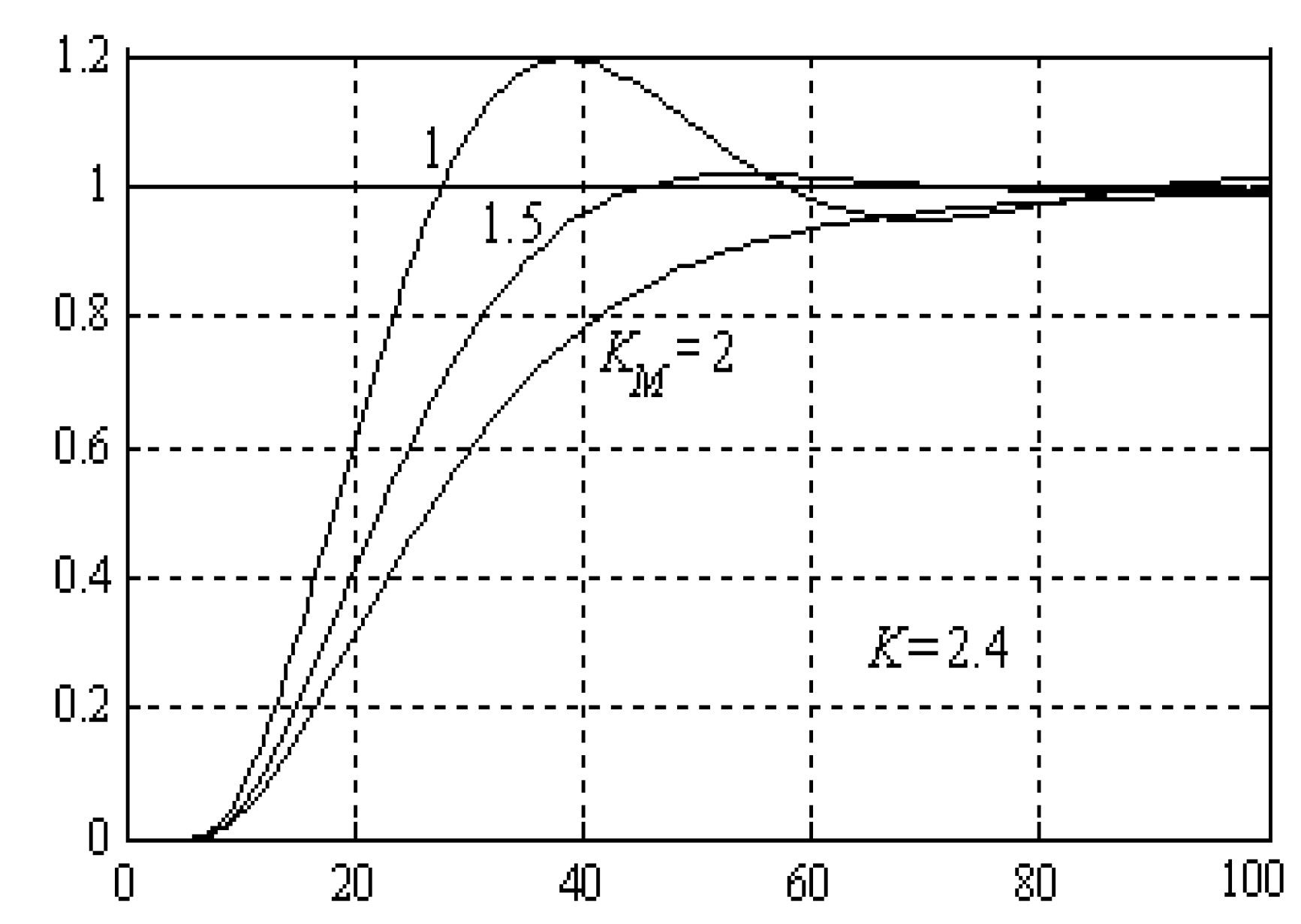
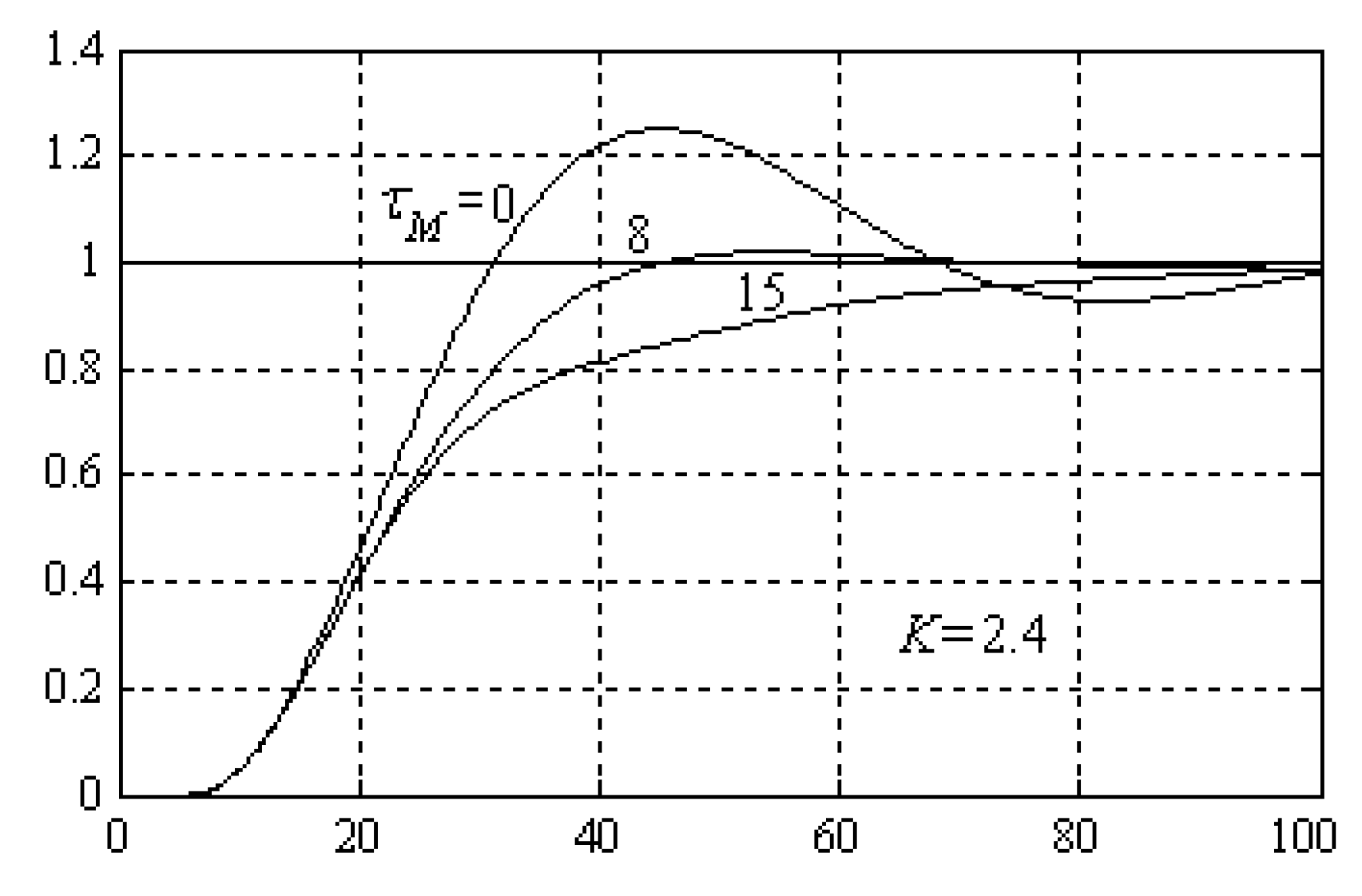
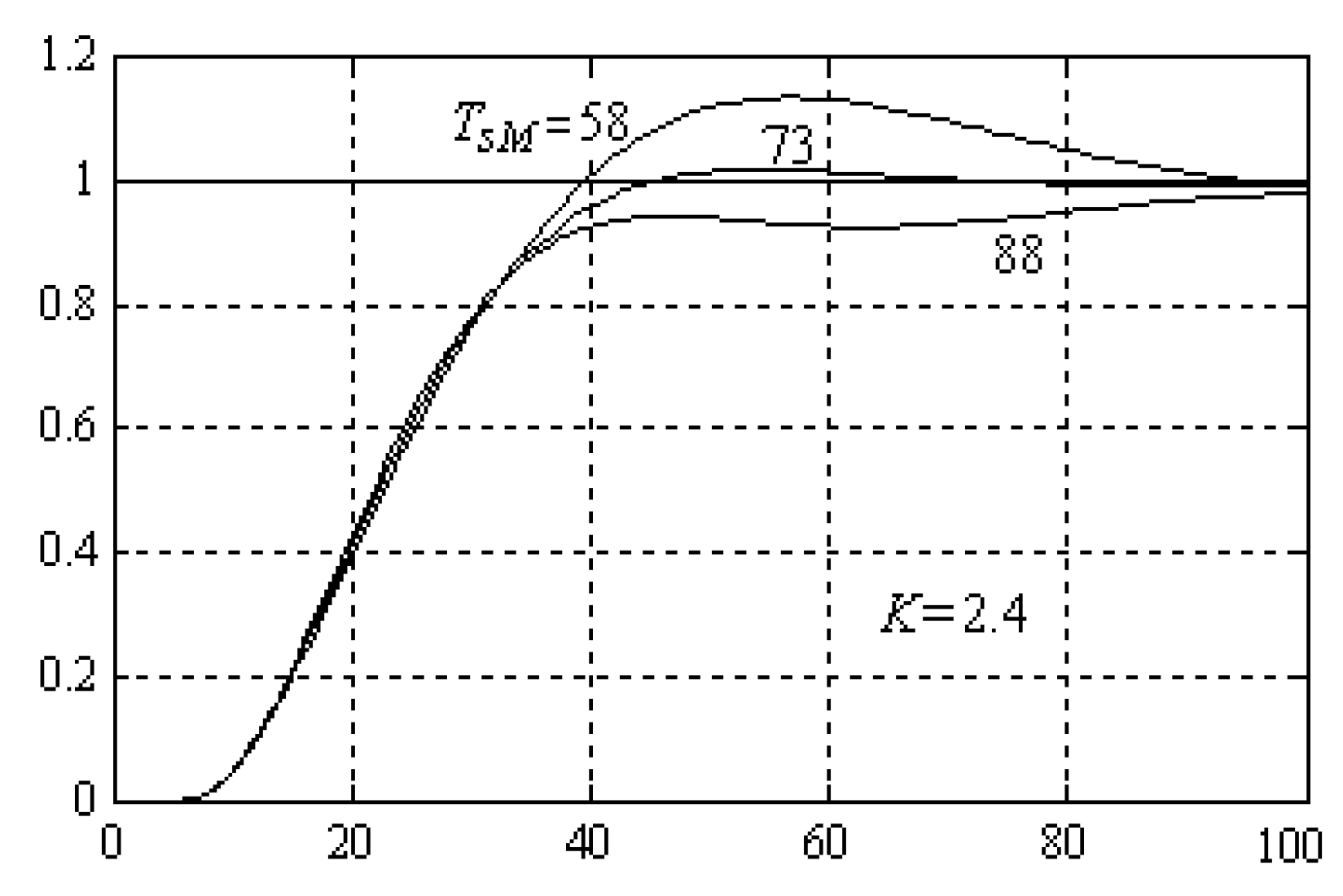
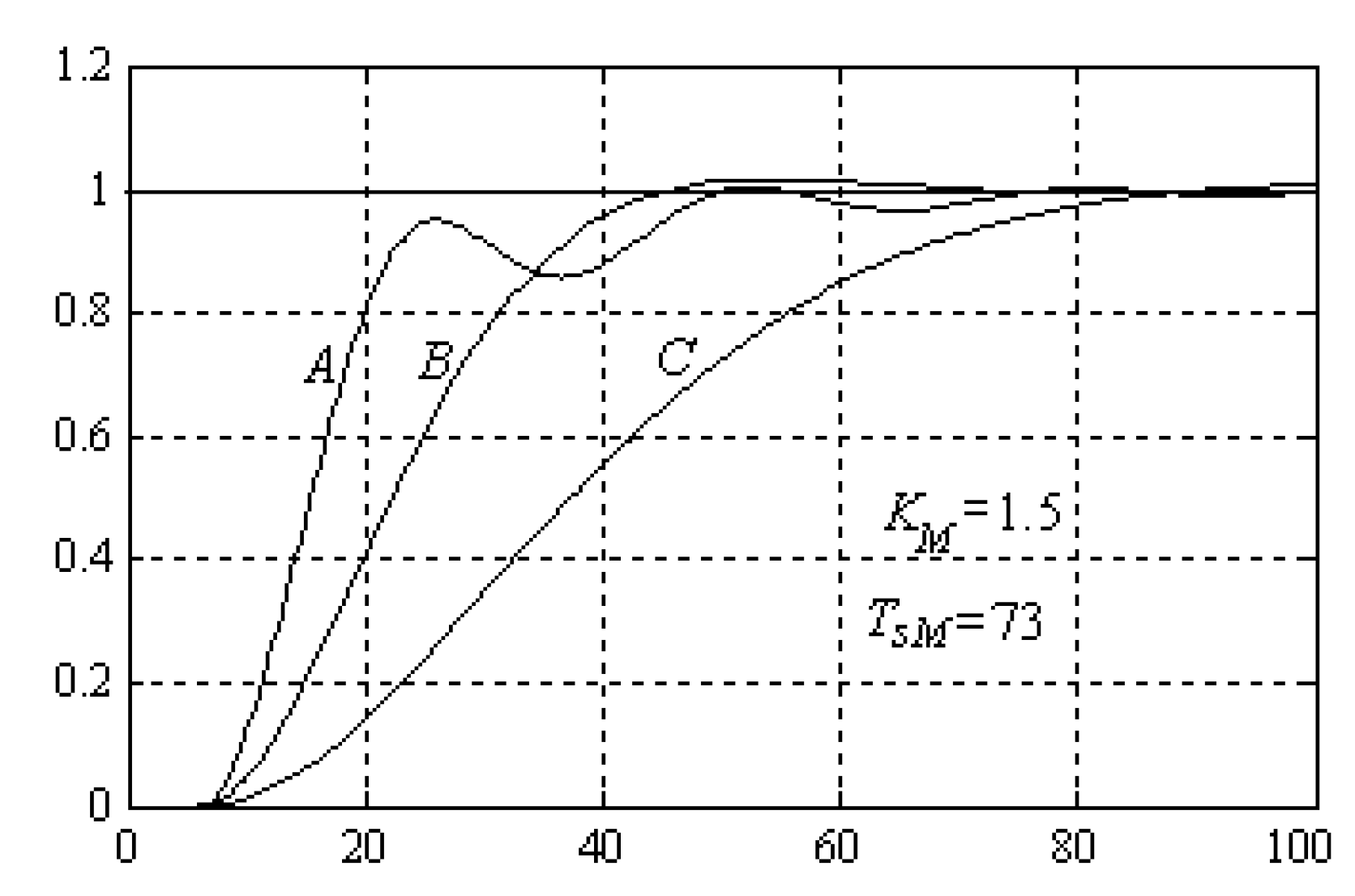
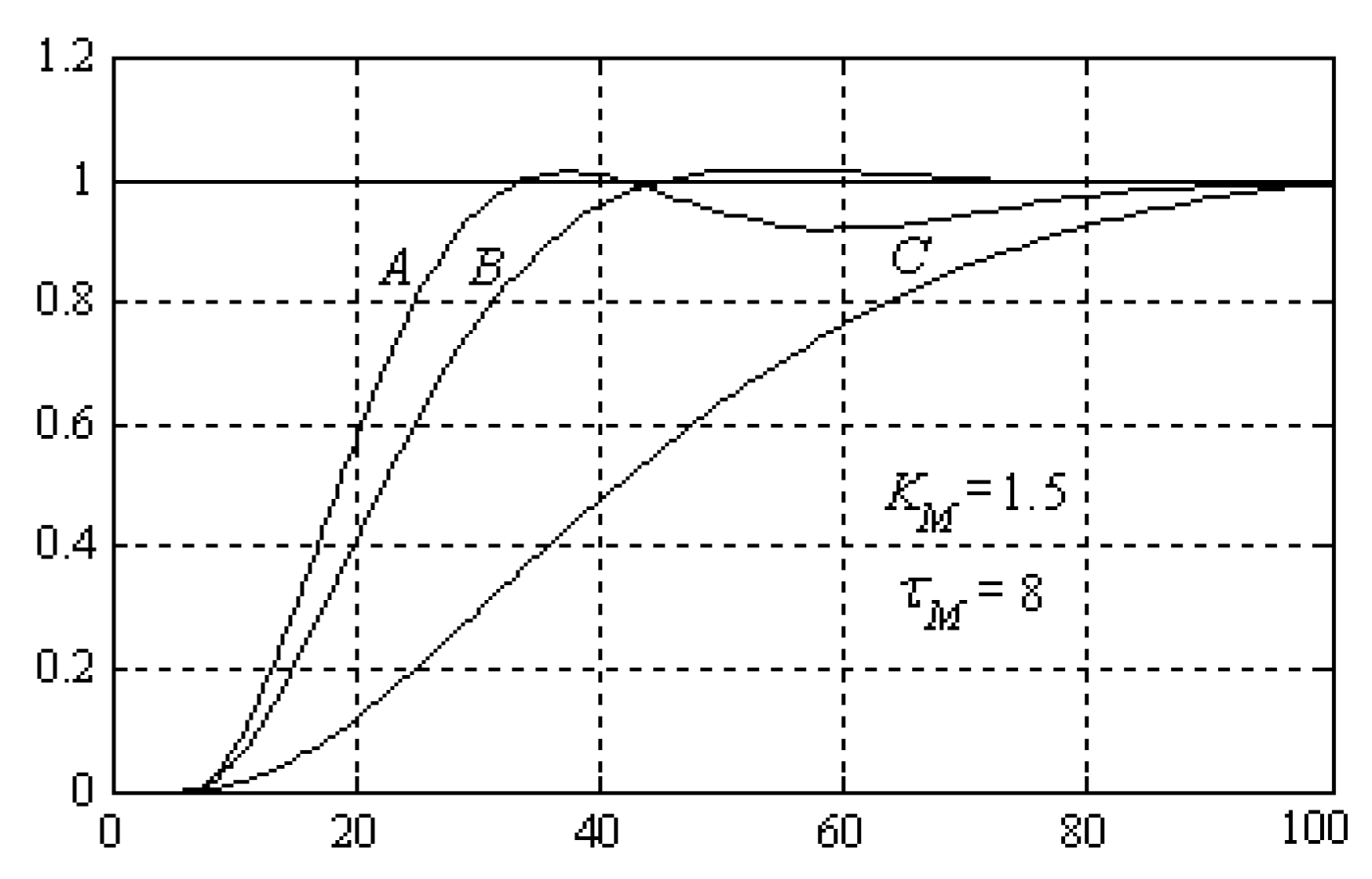
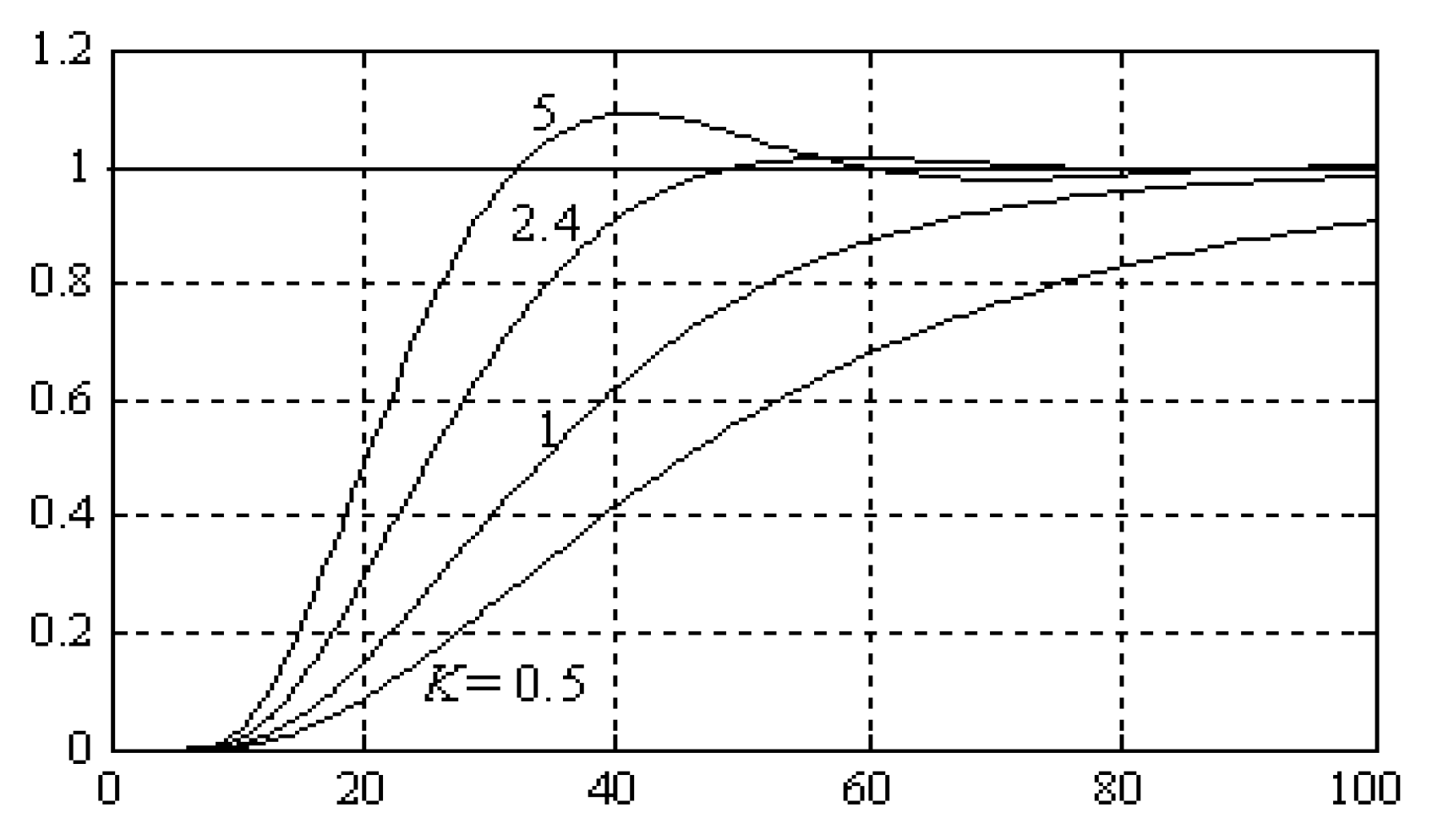
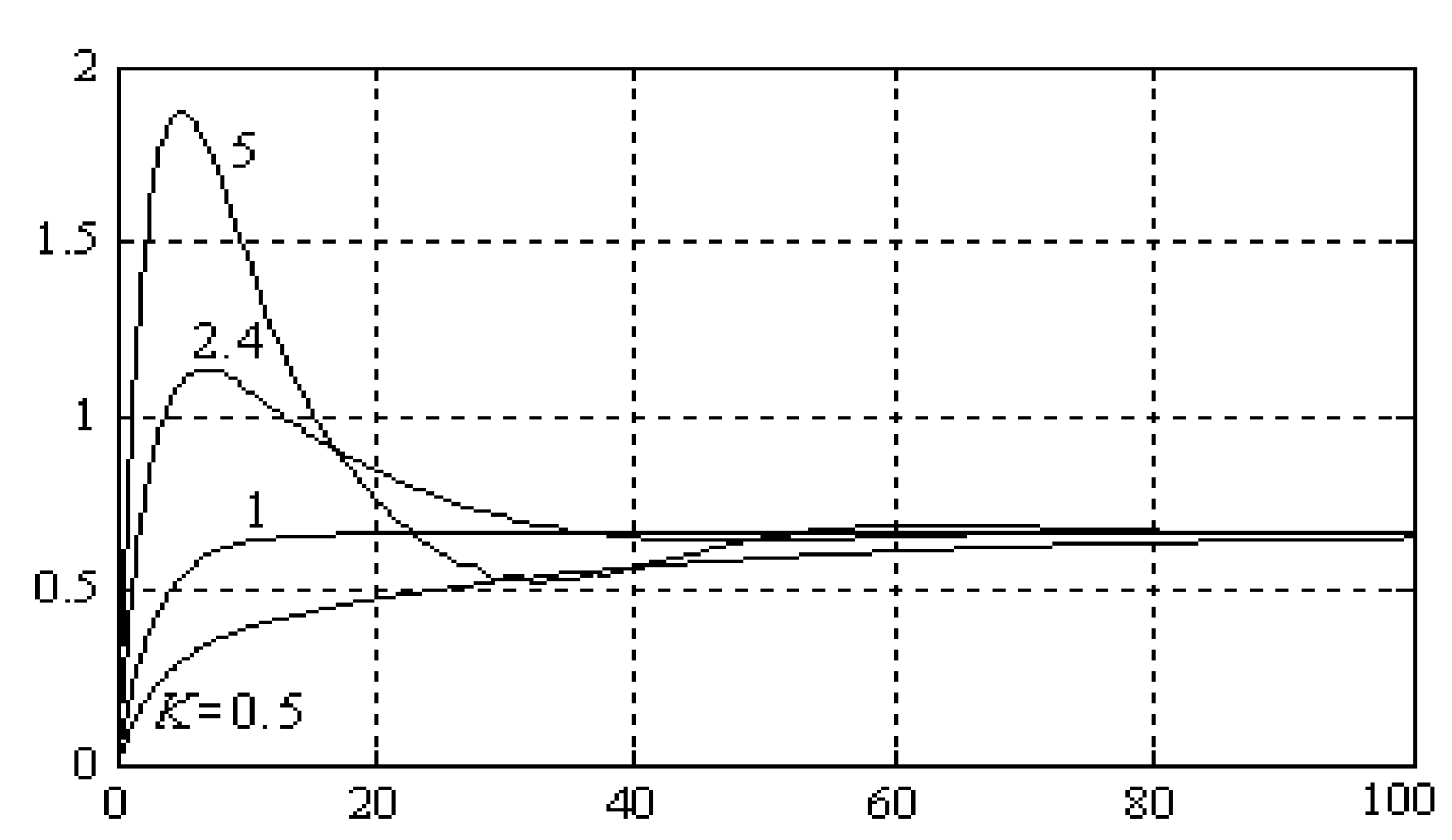
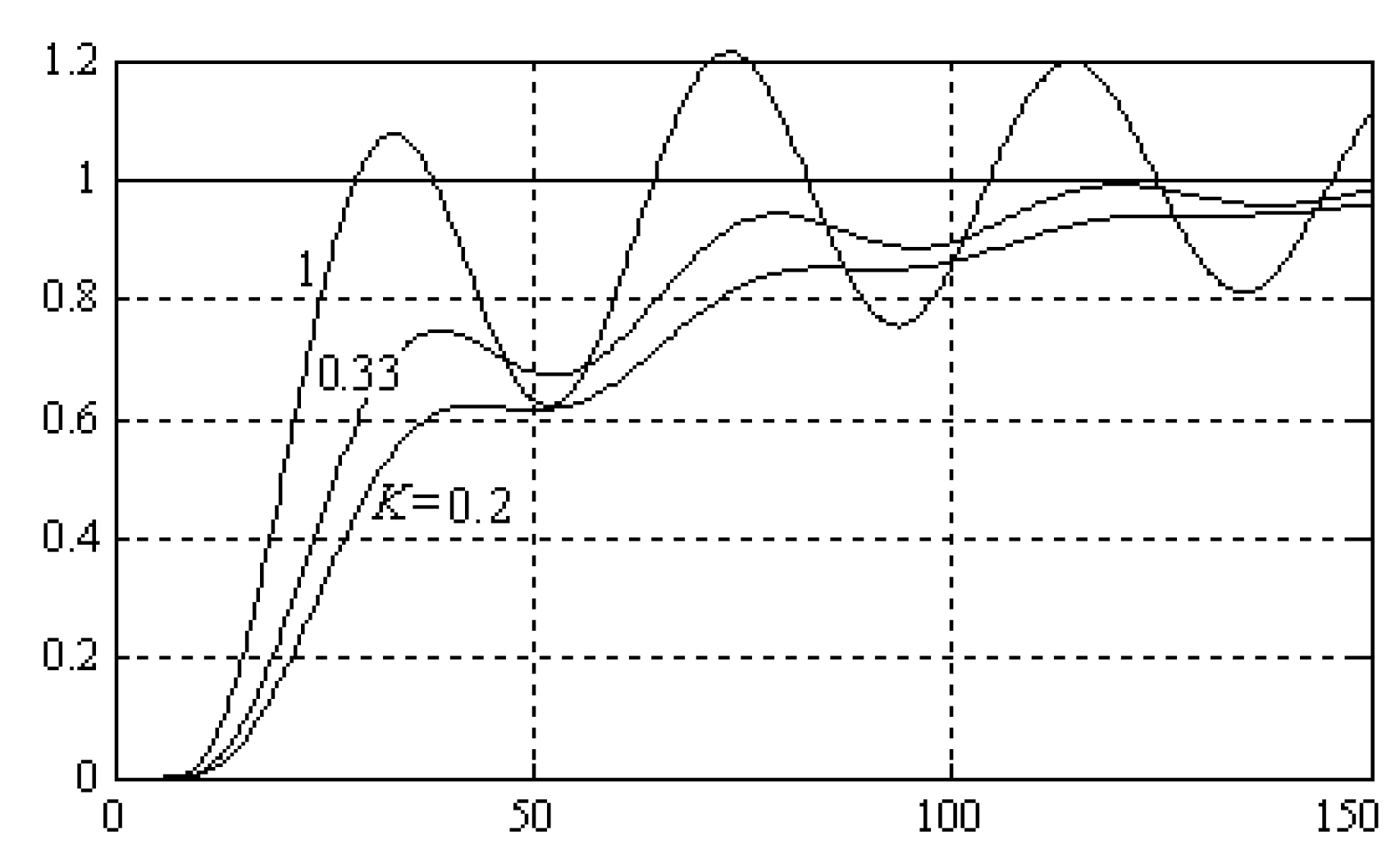
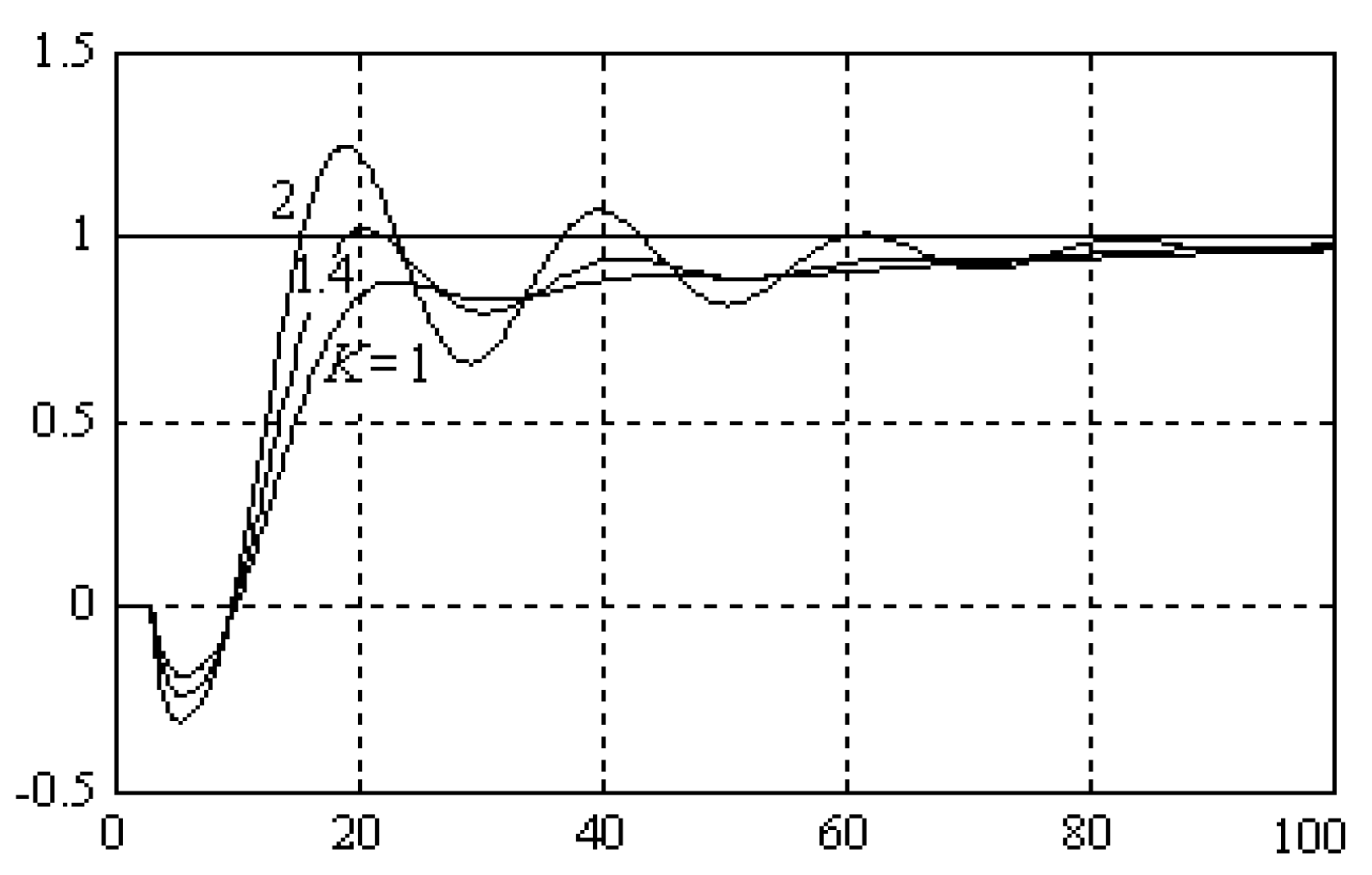
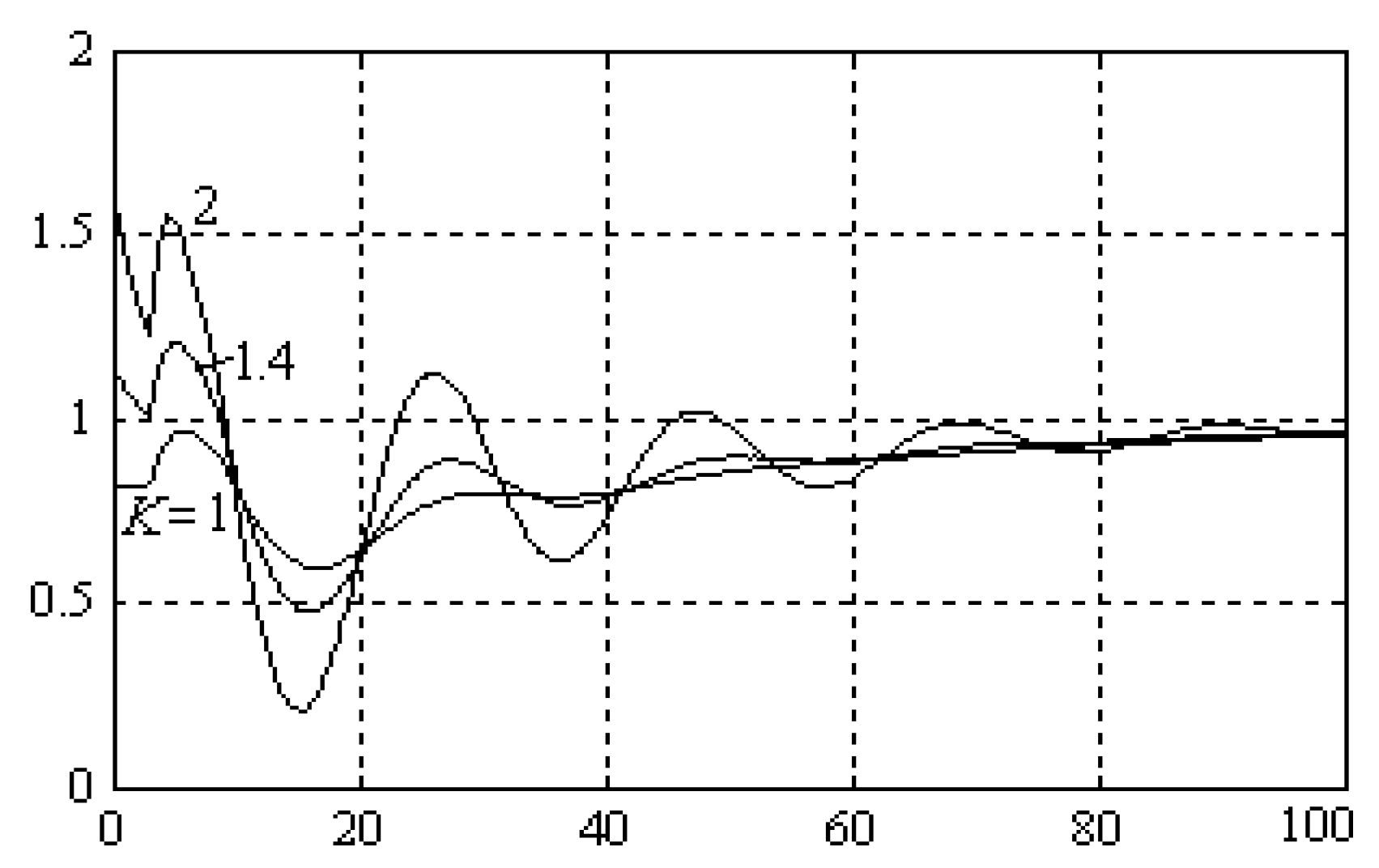
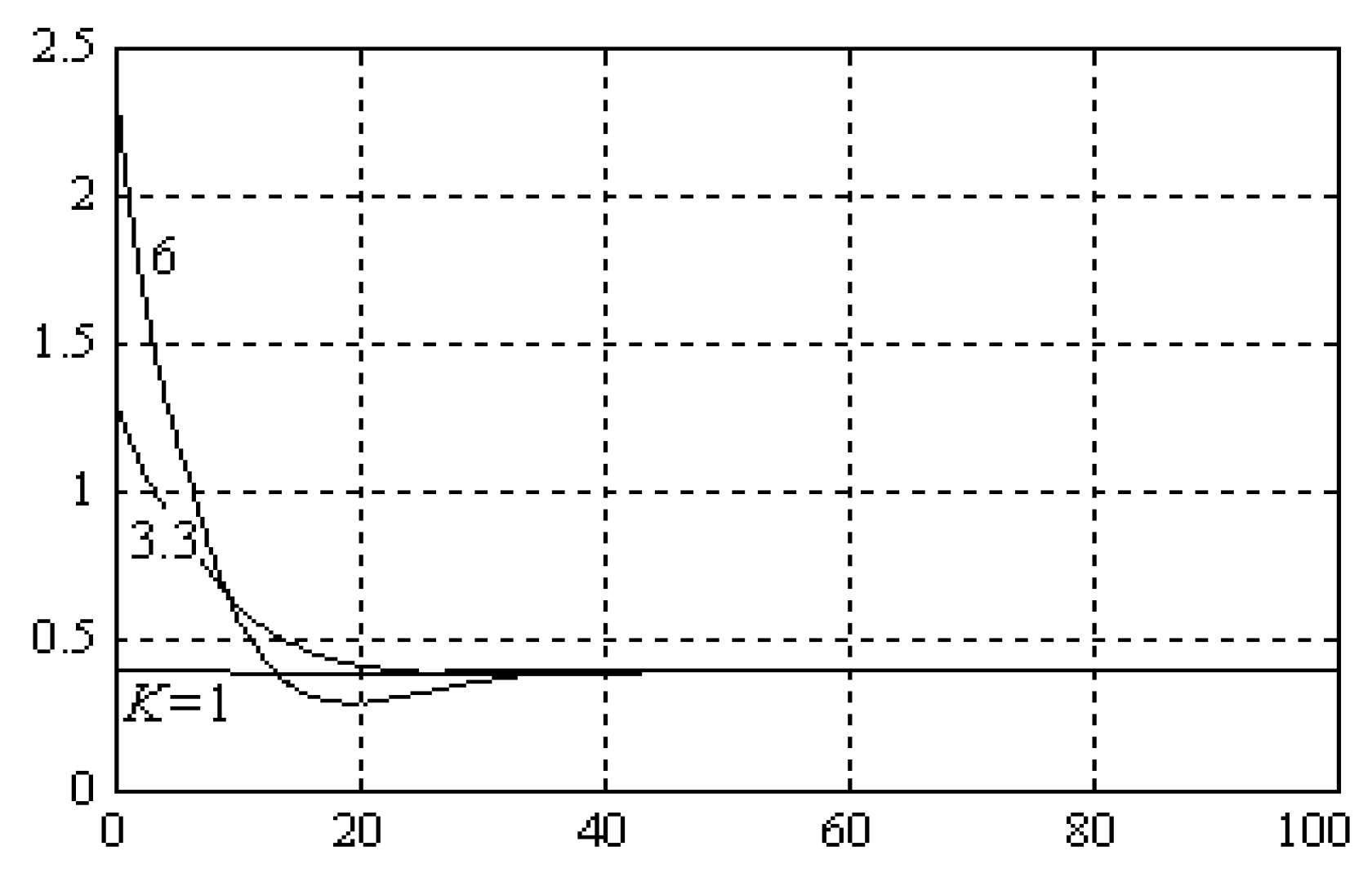
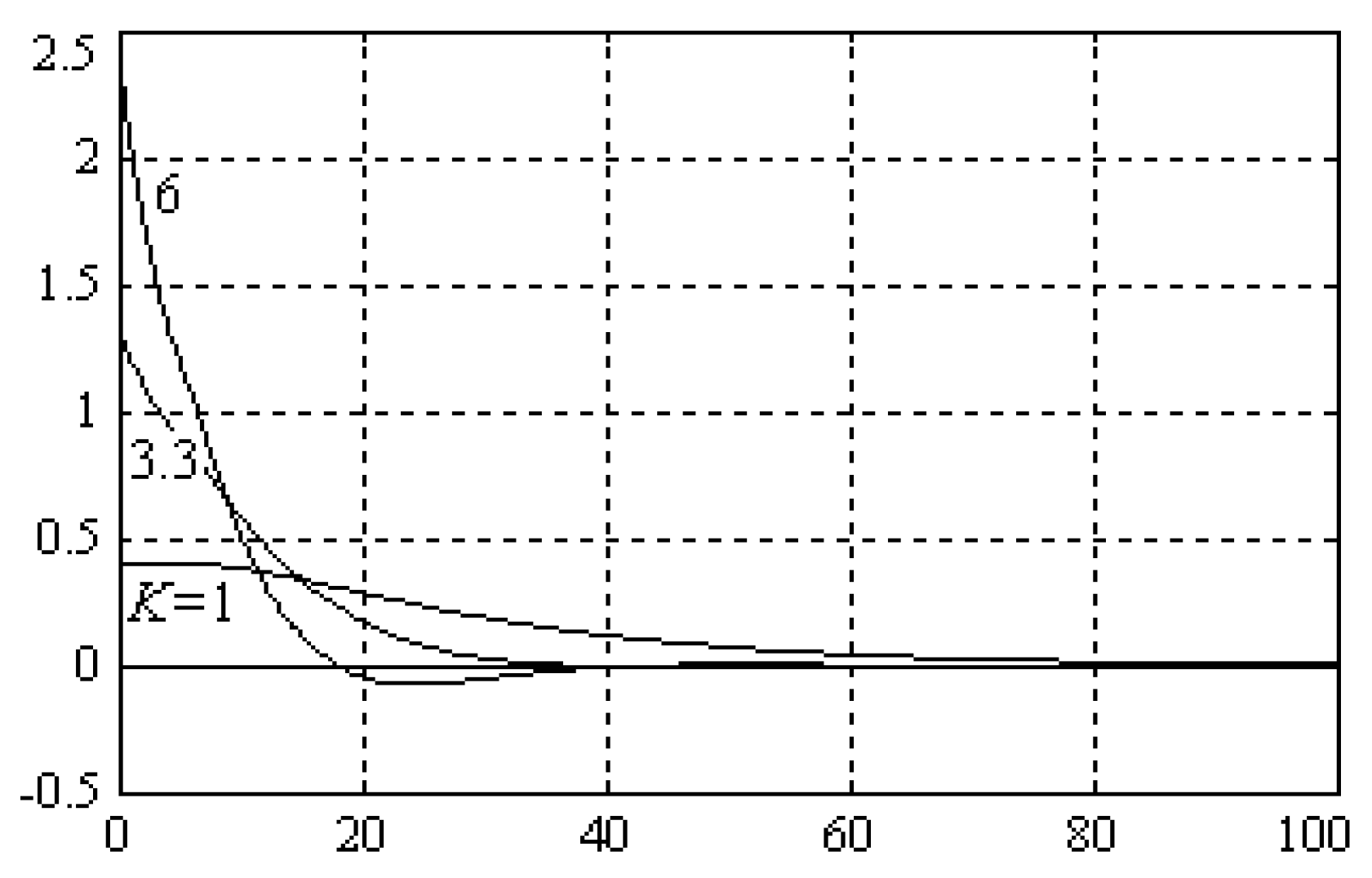
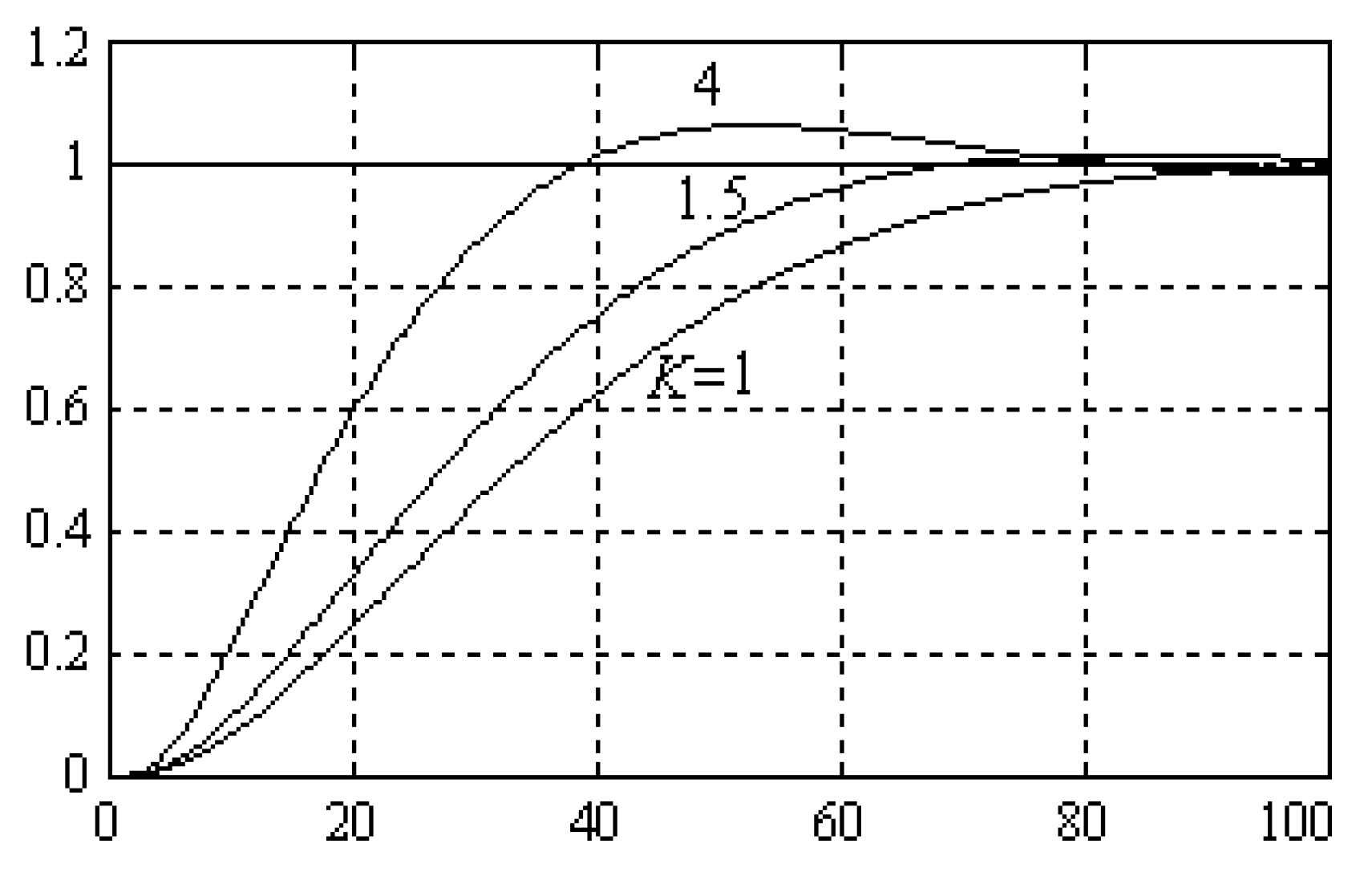
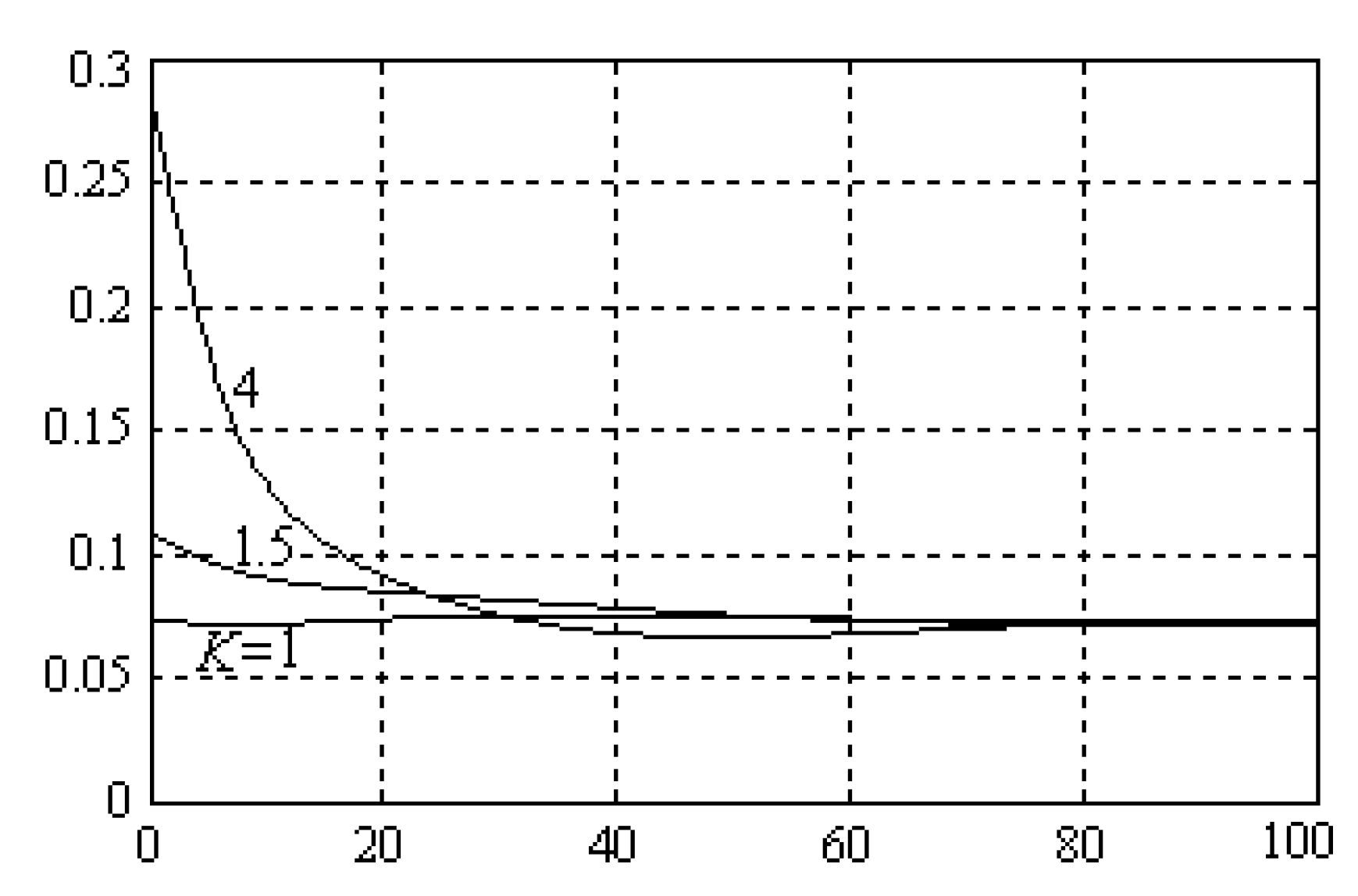
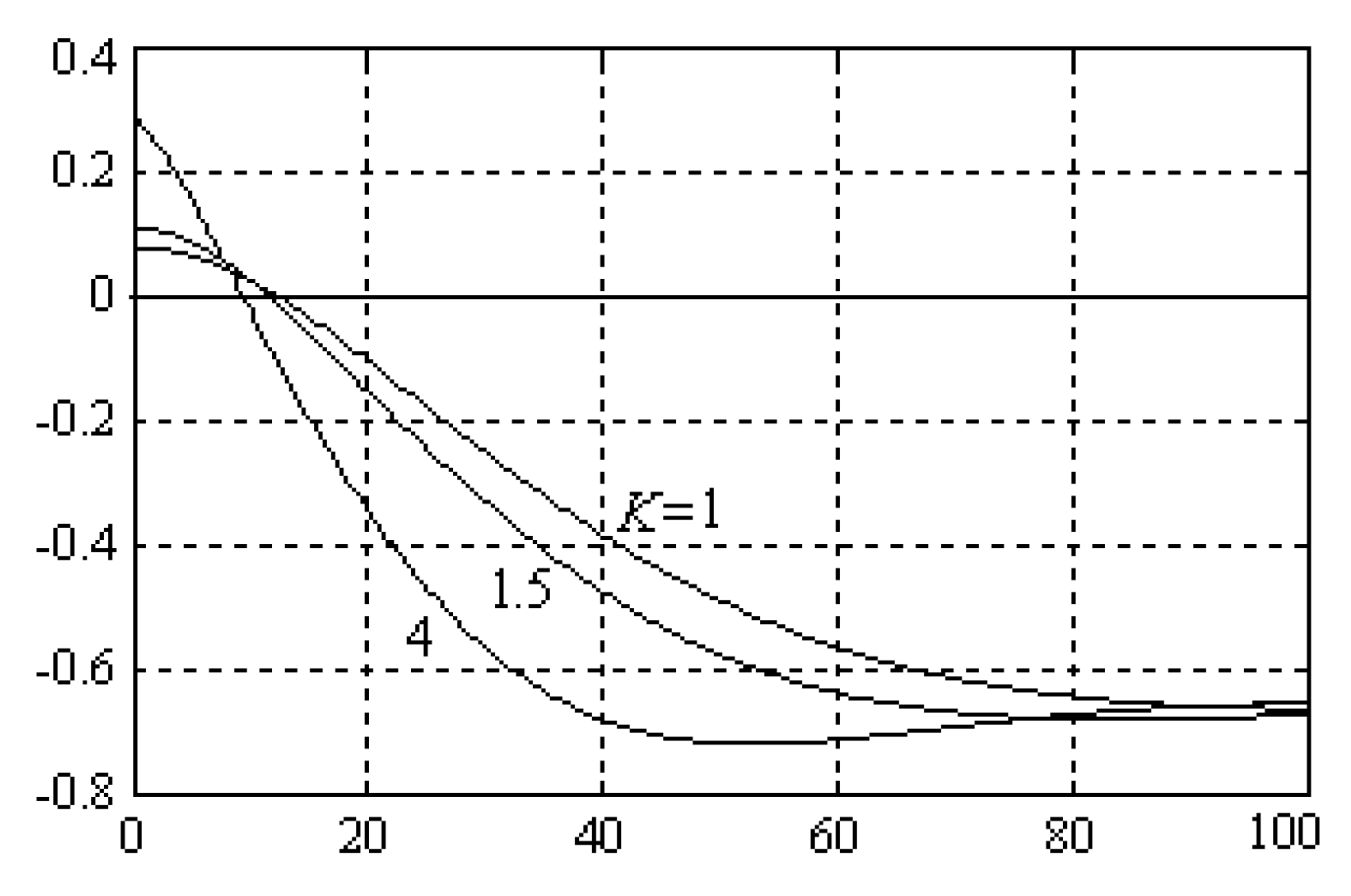
Remark 5. The impact of the tuning gain K on the control action is stronger for larger α. This is illustrated in Figure 4 and Figure 5 for the process, , and four values of α. The control algorithms with and are medium variants between the extreme variants with and , where the control action with respect to K is too weak and too strong, respectively. Notice that the closed-loop control system is stable for , , , and if , , , and , respectively. Remark 6. A simpler control algorithm can be designed by using the first order internal controllerwhereThe time constants can be experimentally identified from the compensated plant response to a step input, as follows:with given by (15). Notice that Theorems 1–3 are also valid for this internal controller. The discrete-time internal controller has the transfer function
where
Therefore, the discrete-time control algorithm has the equations
Based on several real-time control simulations, we can claim that the control performance and the robustness of this controller are comparable with those of the second order internal controller (
25).
7. Conclusions
The paper addresses a practical unified control algorithm which, due to the control performance, robustness to modeling error and process uncertainties, and capacity to be easily tuned and used for all industrial plants, could be a real alternative to the known PID algorithm.
The proposed algorithm is a suitable trade-off between the known P0-IMC algorithm and P1-IMC algorithm, which provide a too weak and a too strong impact of the tuning gain K on the control action, respectively. The P-IMC algorithm is better than the PID algorithm with respect to both the tuning procedure simplicity and the control performance (especially for processes of non-minimum phase or/and with time delay), and is more efficient than the IMC algorithm due to the stronger and safer influence of the component P on the control action.
The algorithm has five parameters: The process feedback gain (used to turn integral or unstable processes into a stable proportional compensated process), the tuning gain K (used to adjust the control intensity), and three parameters of the compensated process model: Steady-state gain, time delay, and settling time. All parameters of the P-IMC algorithm can be determined experimentally. By choosing a suitable K, the reference tracking performance is satisfactory even for a large uncertainty of the model parameters. However, as a general recommendation, it is desirable that the value of a parameter of the compensated process model to be selected equal or larger than its real value. For such a larger selection, the best tuning gain K is usually more than 1, and the control performance is better than for a smaller selection (when the best K is less than 1).
There is a simple procedure to check and correct online the model parameters through simple visual analysis of the shape of the internal controller response to a step reference. This procedure is based on the step control principle, which states that for and a perfect model, the internal controller response to a step reference has a step shape. Thus, by analyzing the deviation of the internal controller response from the step shape, the model parameters can be suitably adjusted to improve the model accuracy.
If the steady-state gains of the model and the compensated process are equal to each other, the initial value of the internal controller response to a step reference is K times its final value. This feature enables the human operator to select the tuning gain K and understand better its role in the control action.
Since the proposed P-IMC algorithm can be implemented in practice only in discrete-time, it is designed in both continuous-time and discrete-time.
For and (i.e., ), the P-IMC algorithm has been tested in real time, with excellent results, in laboratory and field conditions. In the future, interesting comparative research and control applications based on the P-IMC algorithm could be made in chemistry and allied engineering fields.






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}