
Dynamic Response Analysis of a Wavestar-Type Wave Energy Converter Using Augmented Formulation in Korean Nearshore Areas


Abstract
:1. Introduction
2. Calculation Methods
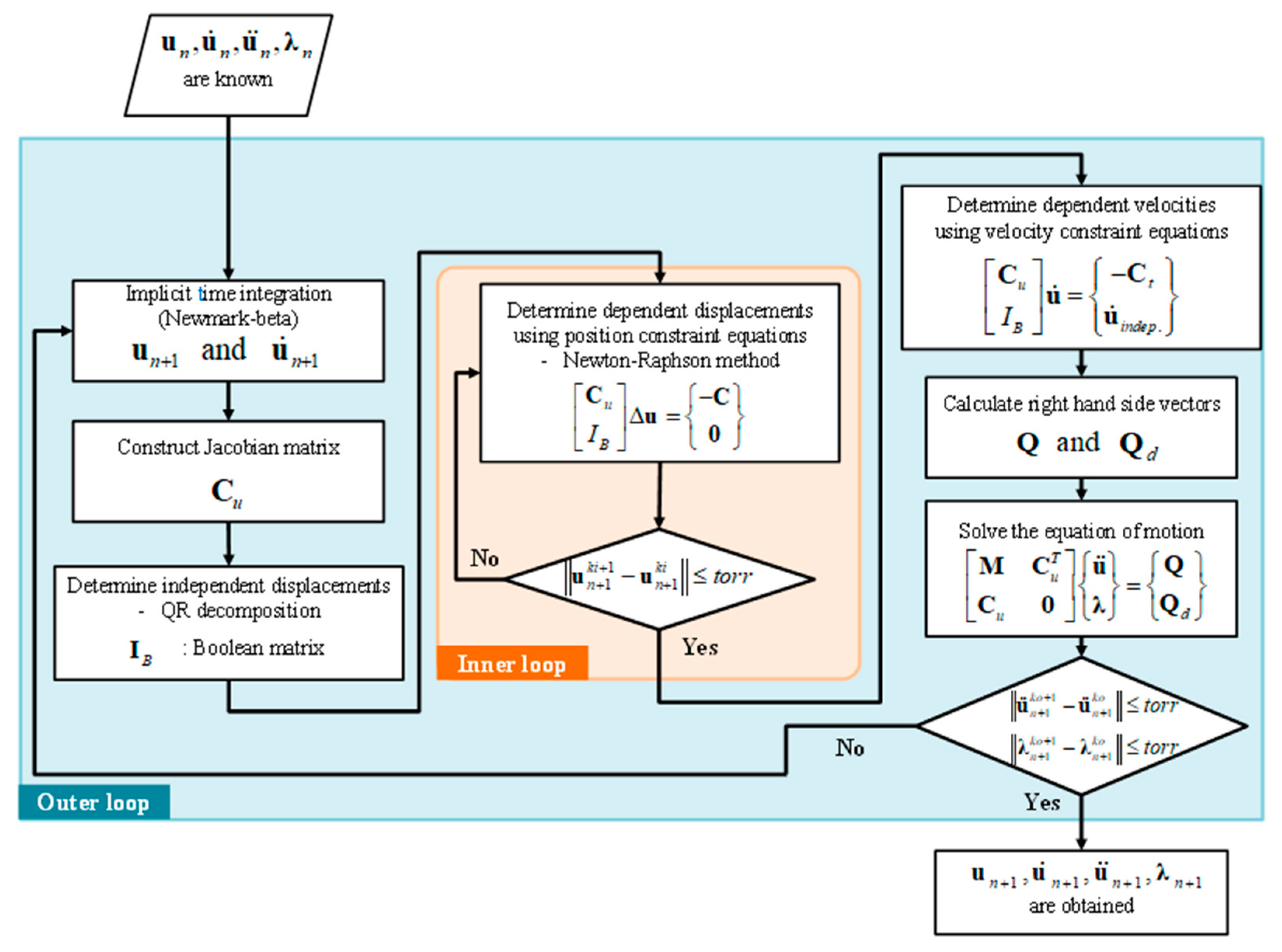
2.1. Equation of Motion of a Constrained Rigid Body System
2.2. External Forces Acting on the Floating Body
3. Numerical Simulation
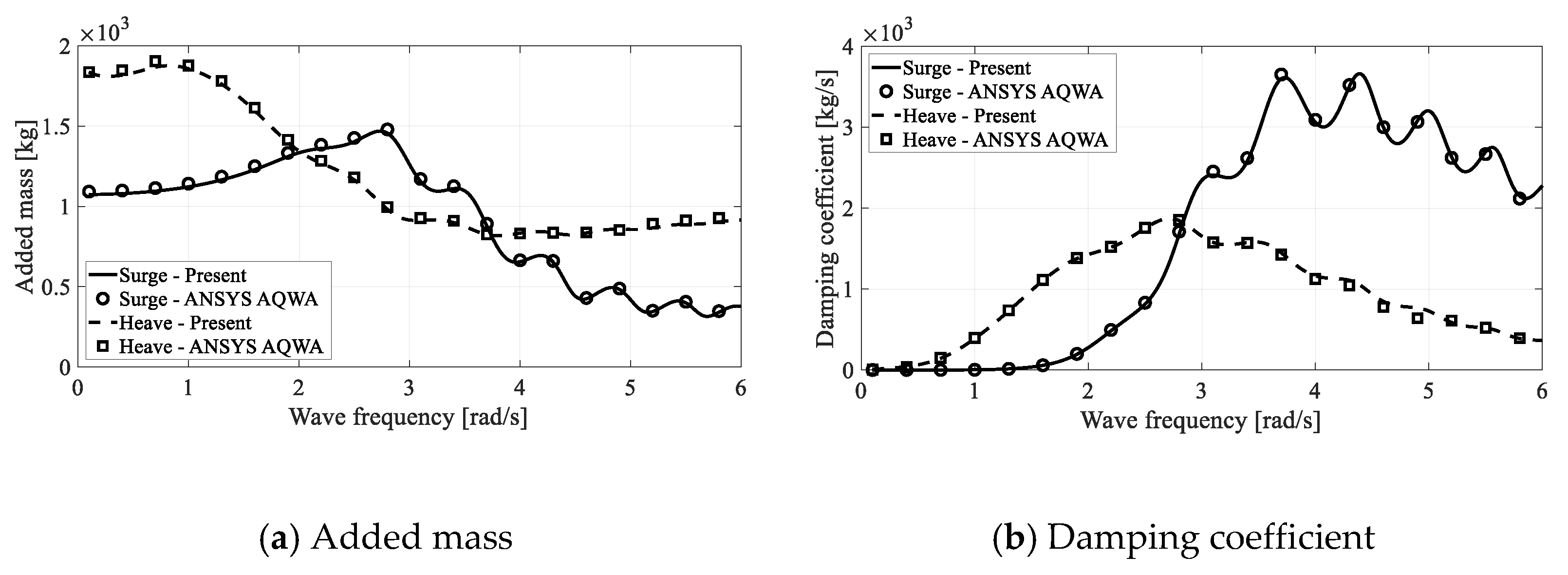
3.1. Verification of Numerical Results
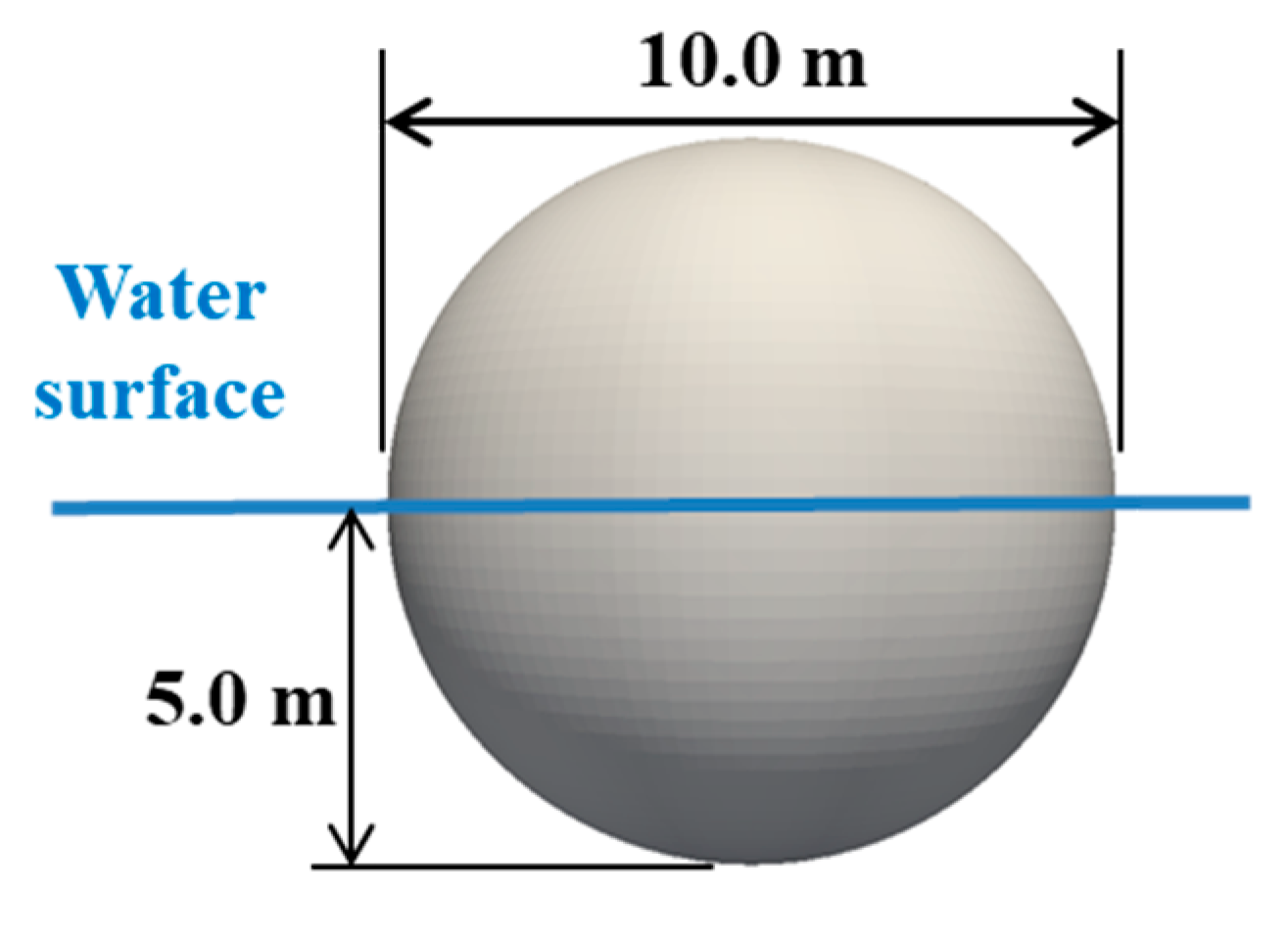
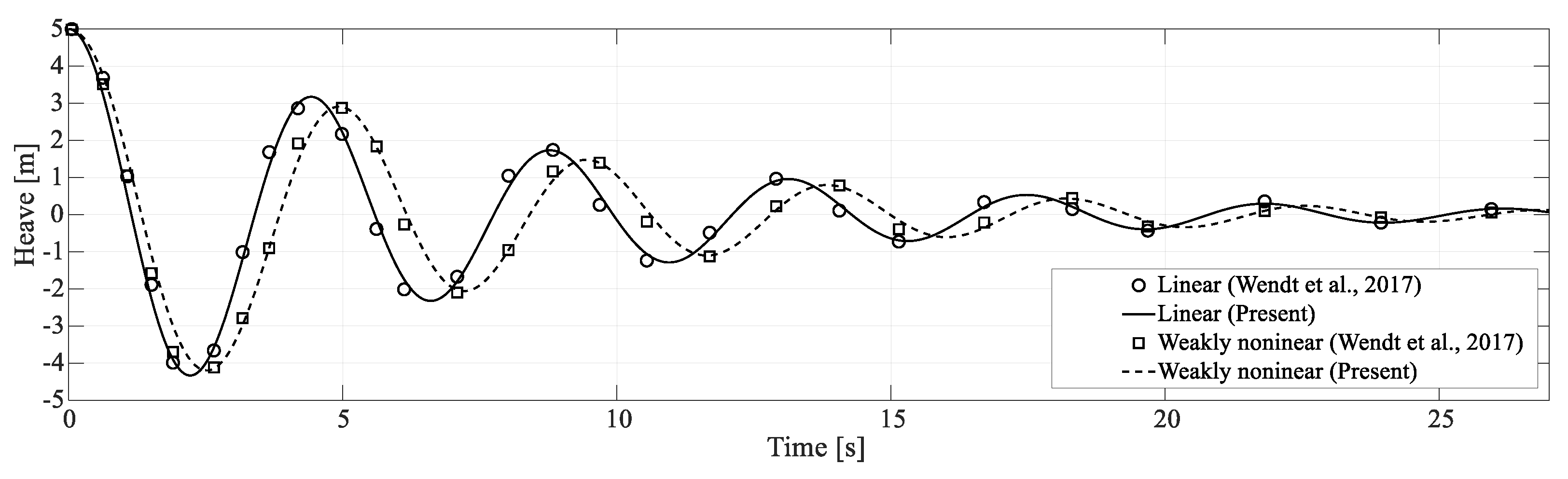
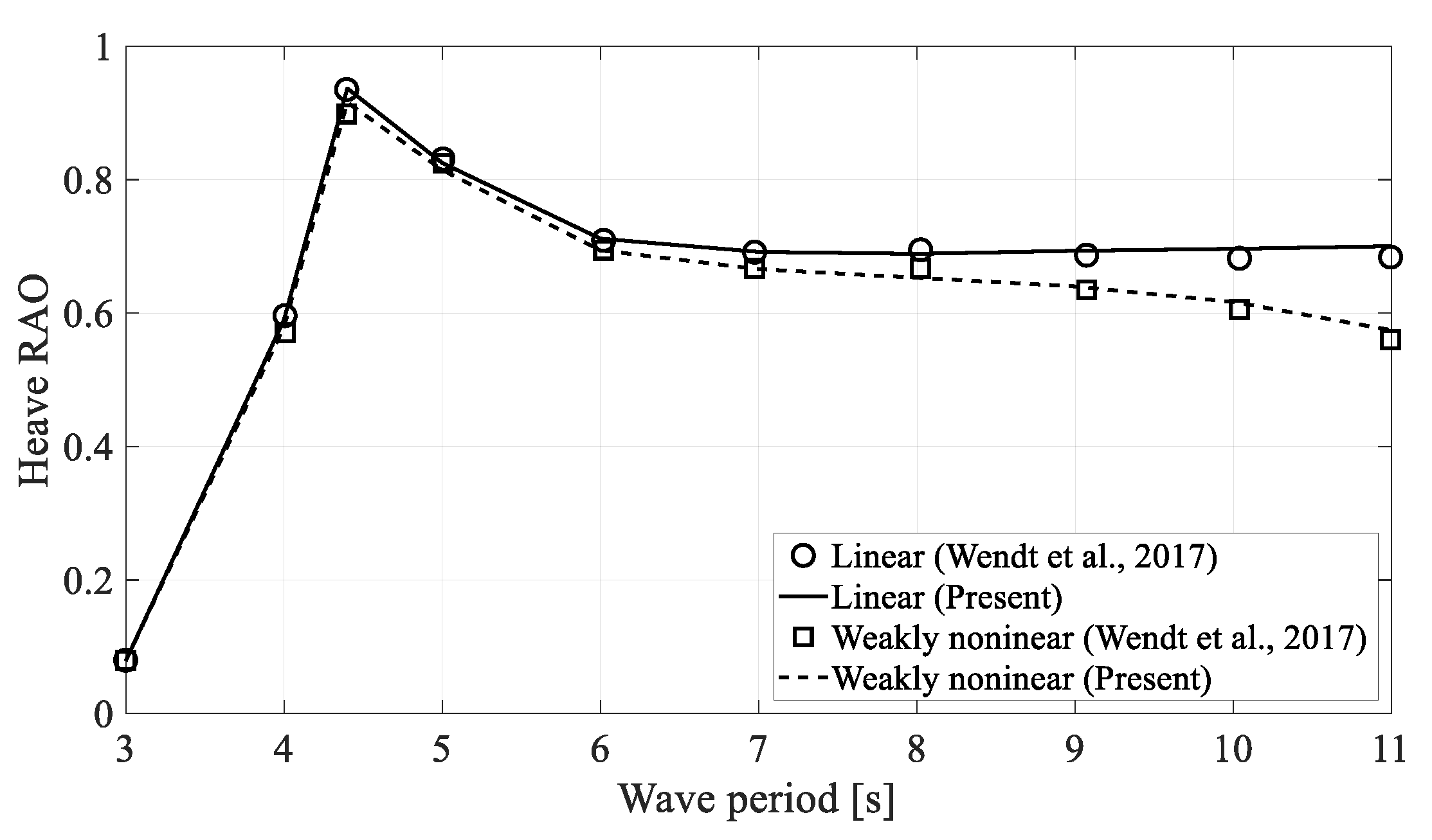
3.1.1. Heave Motion of a Single Spherical Float
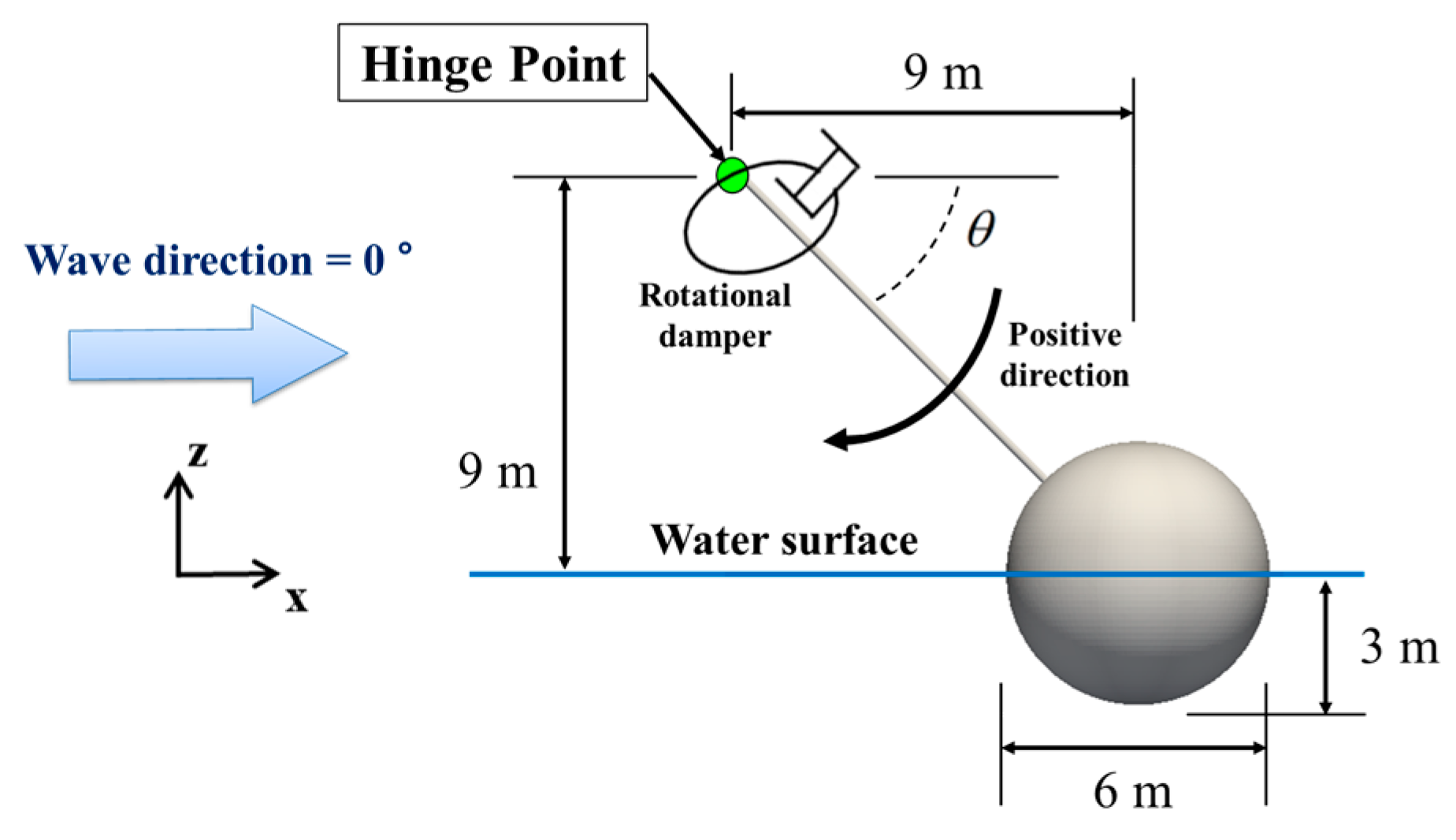
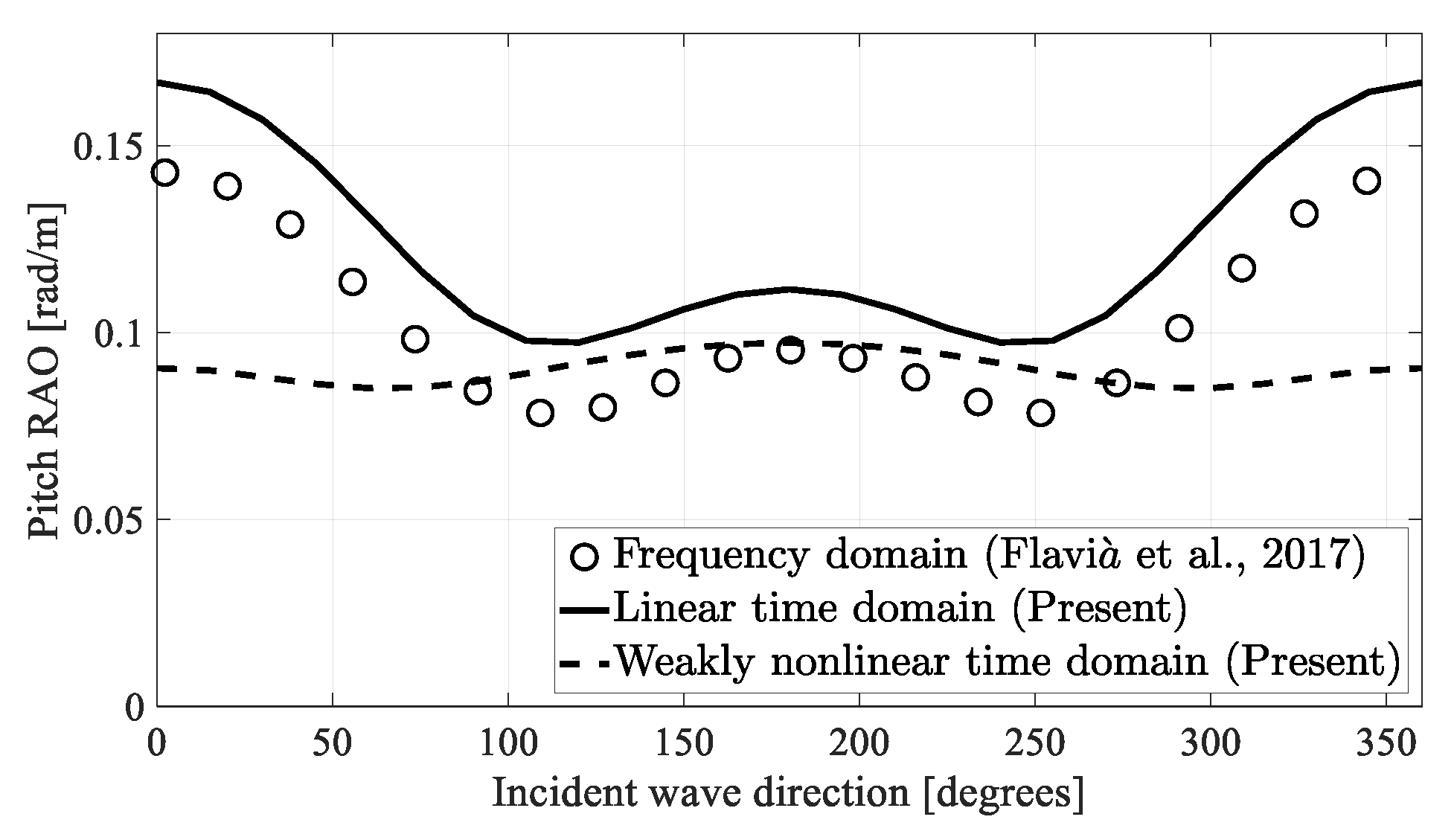
3.1.2. Motion of a Spherical Float Constrained to a Hinge Point
3.2. Simulation Results and Analysis
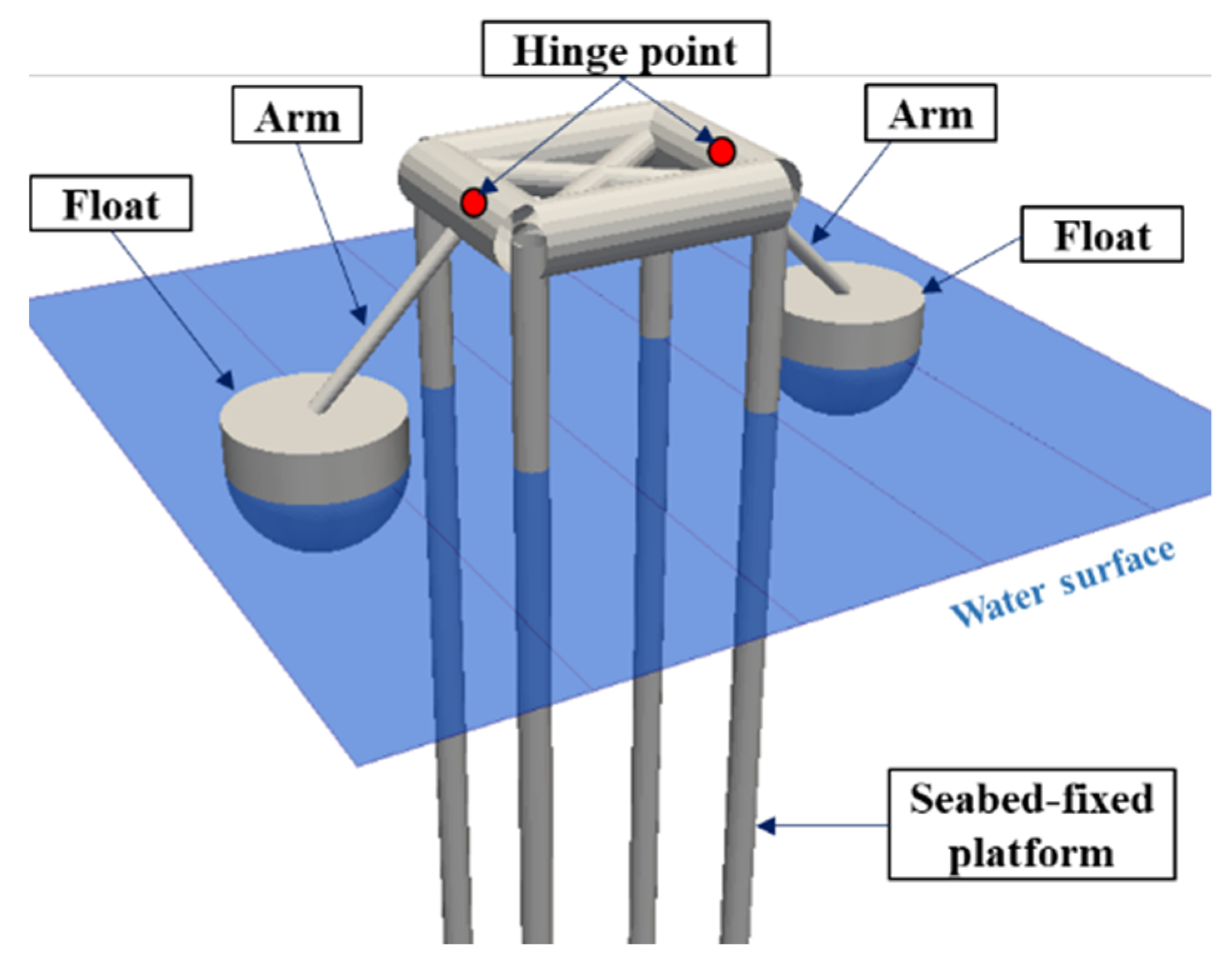
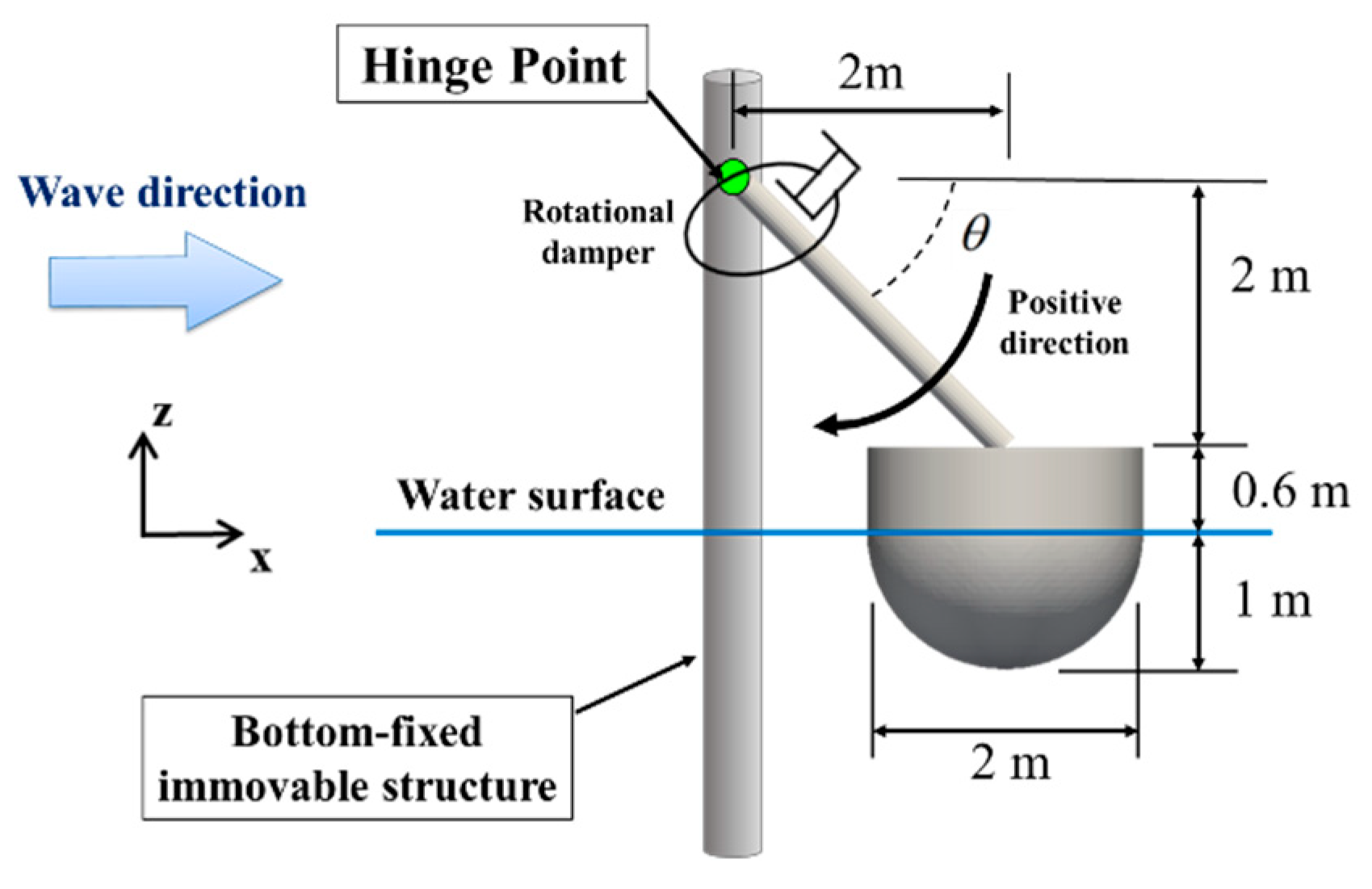
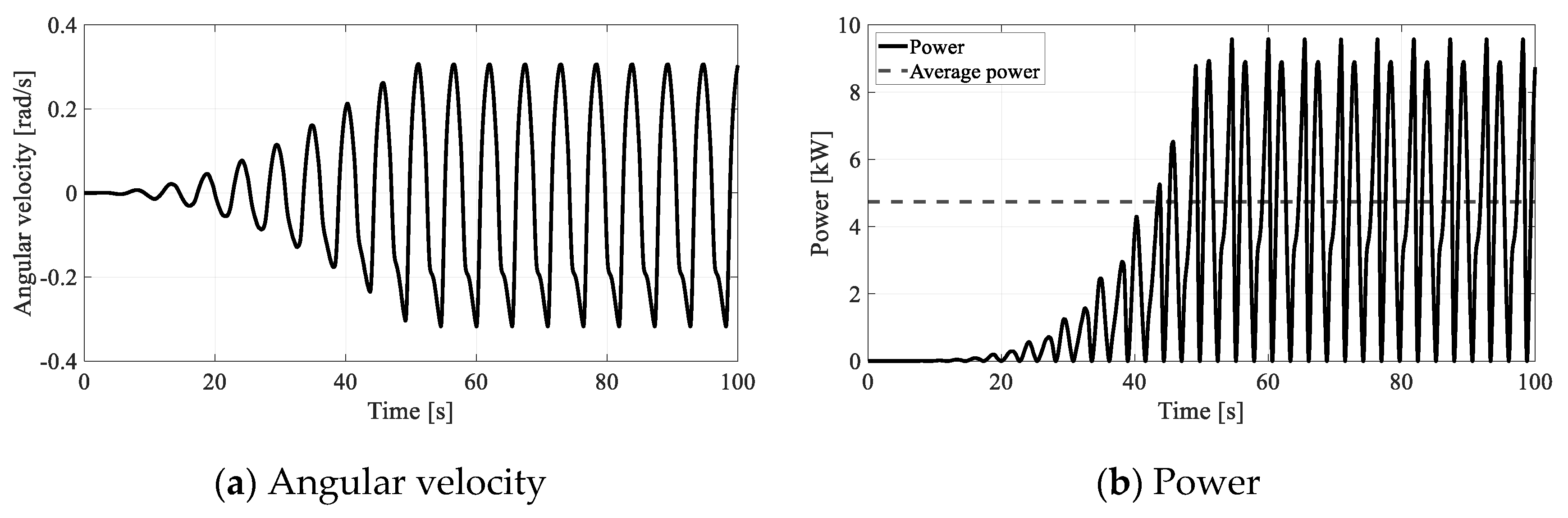
3.2.1. Single Hemispherical Float
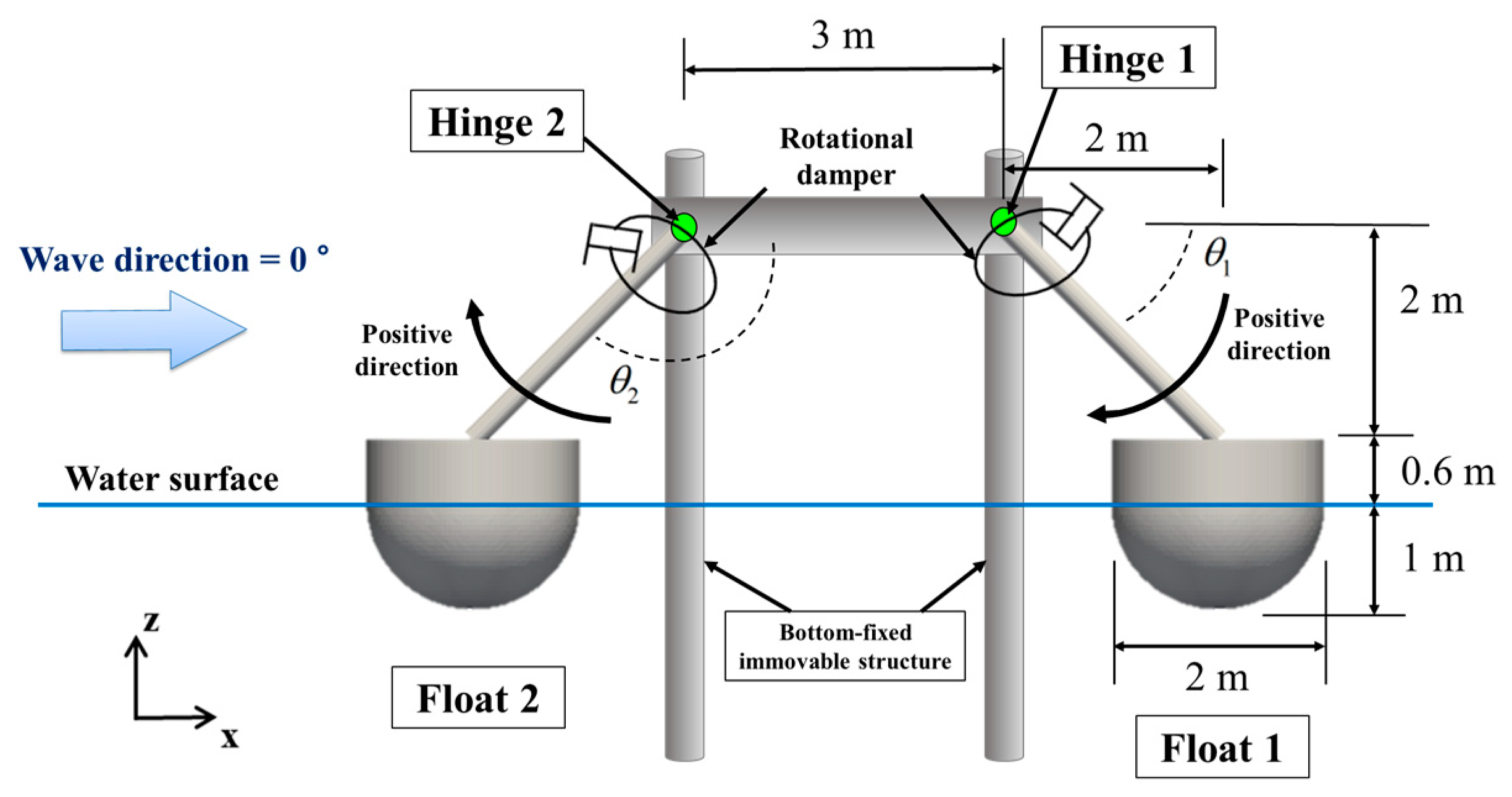
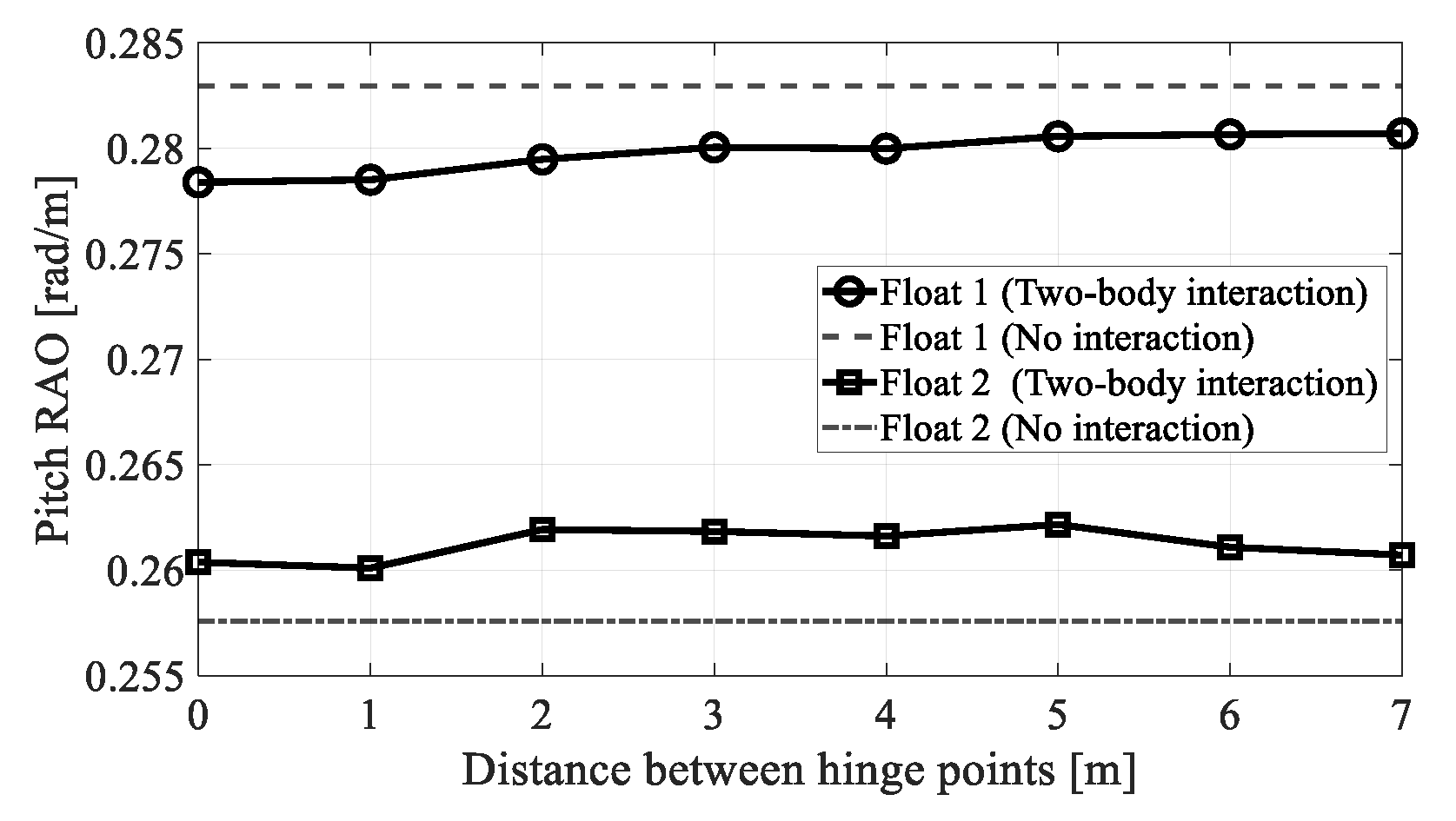
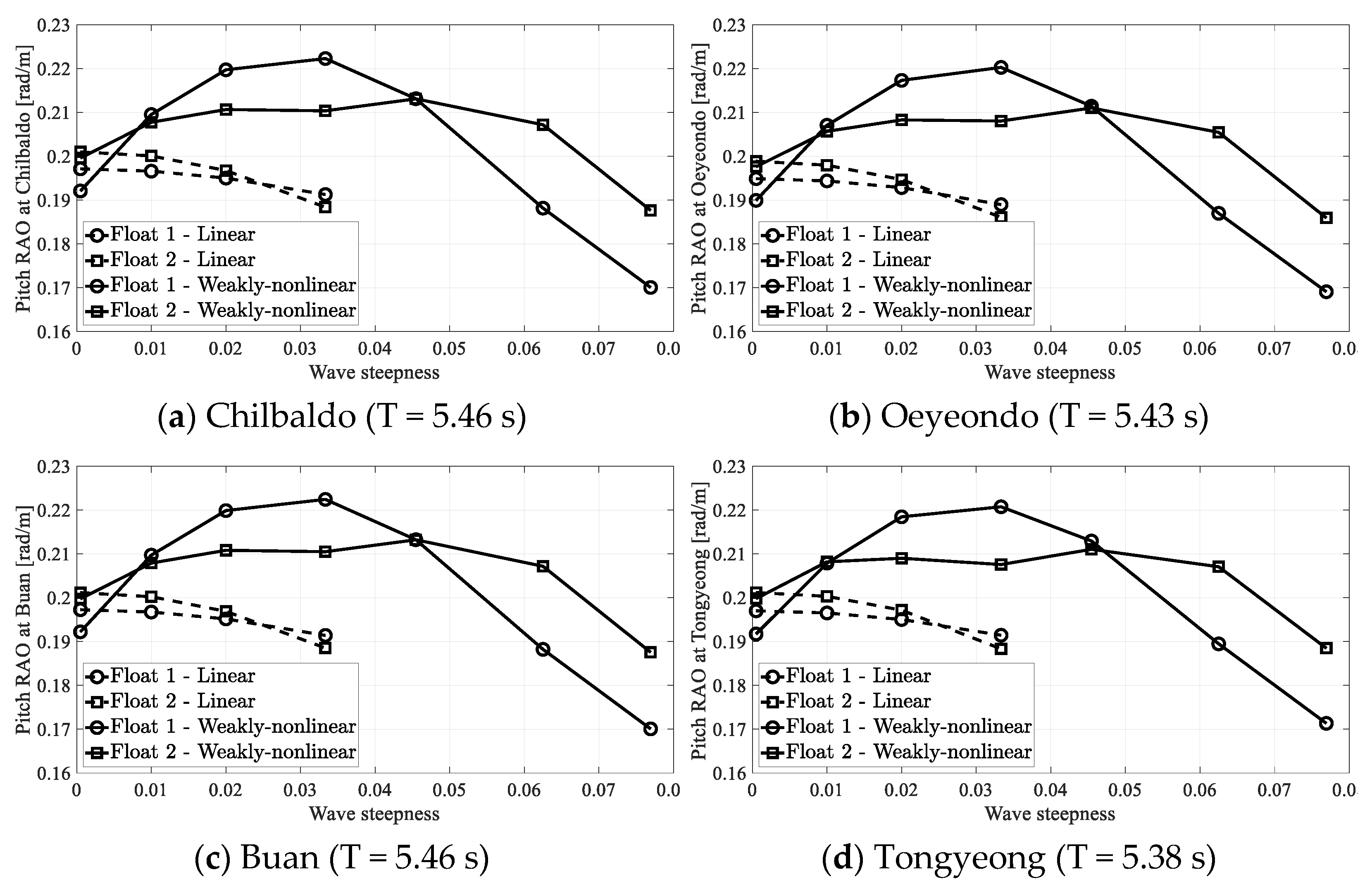
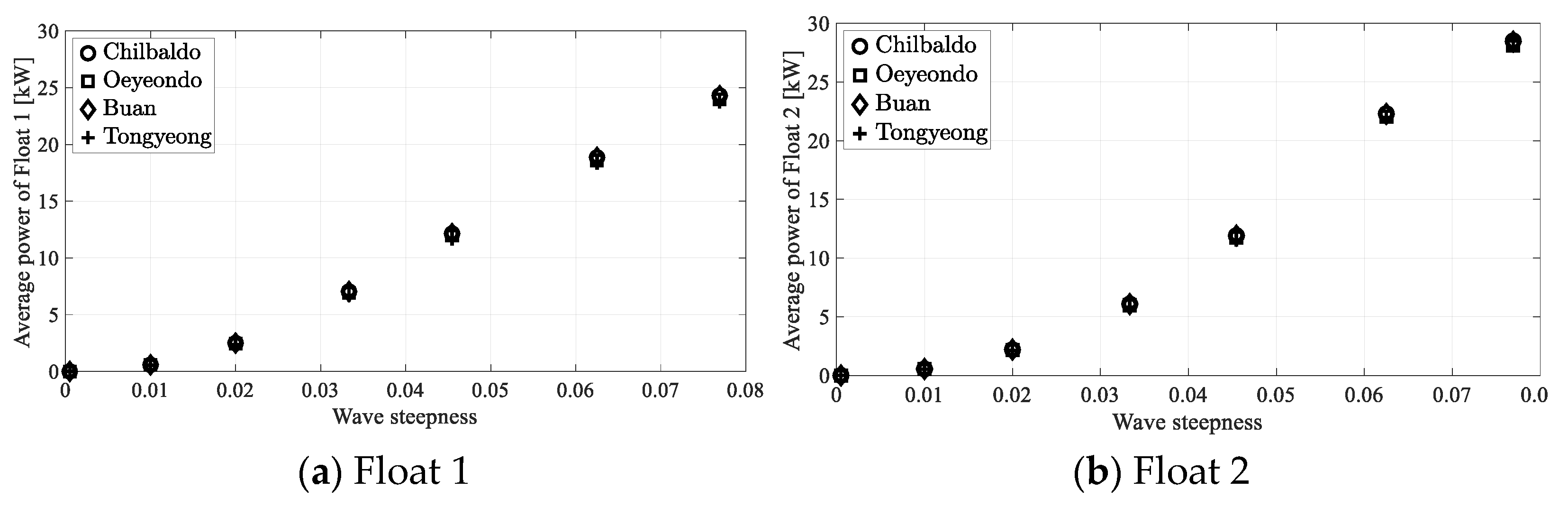
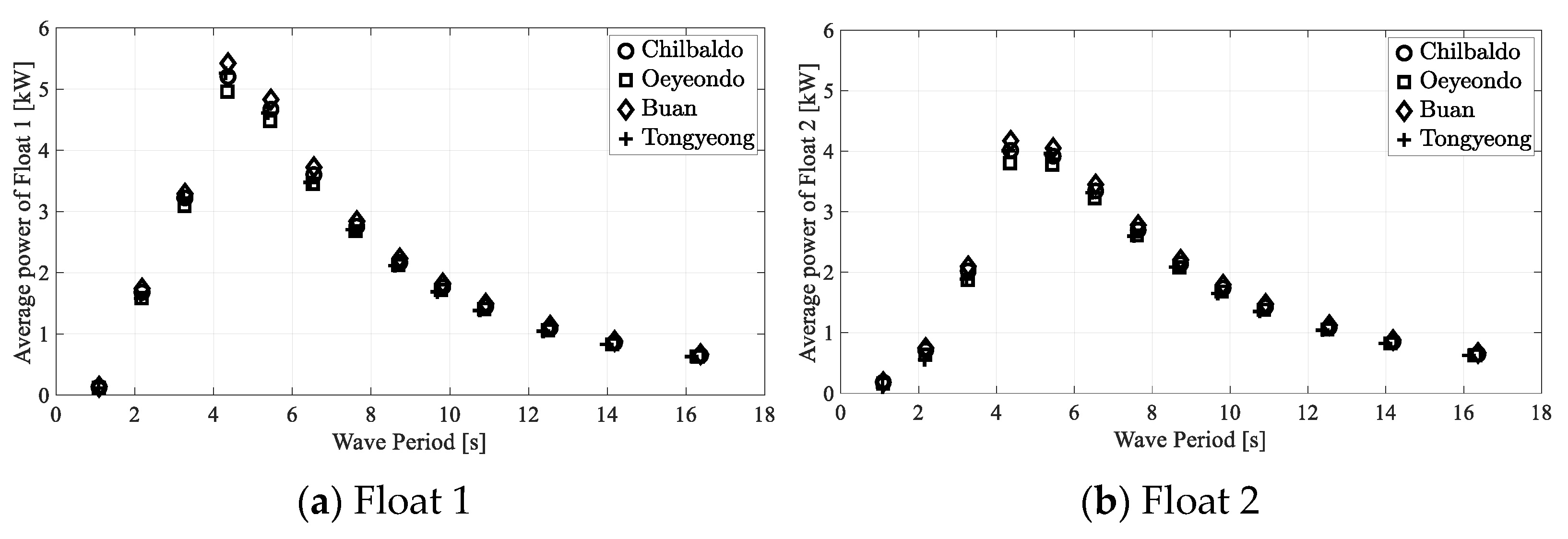
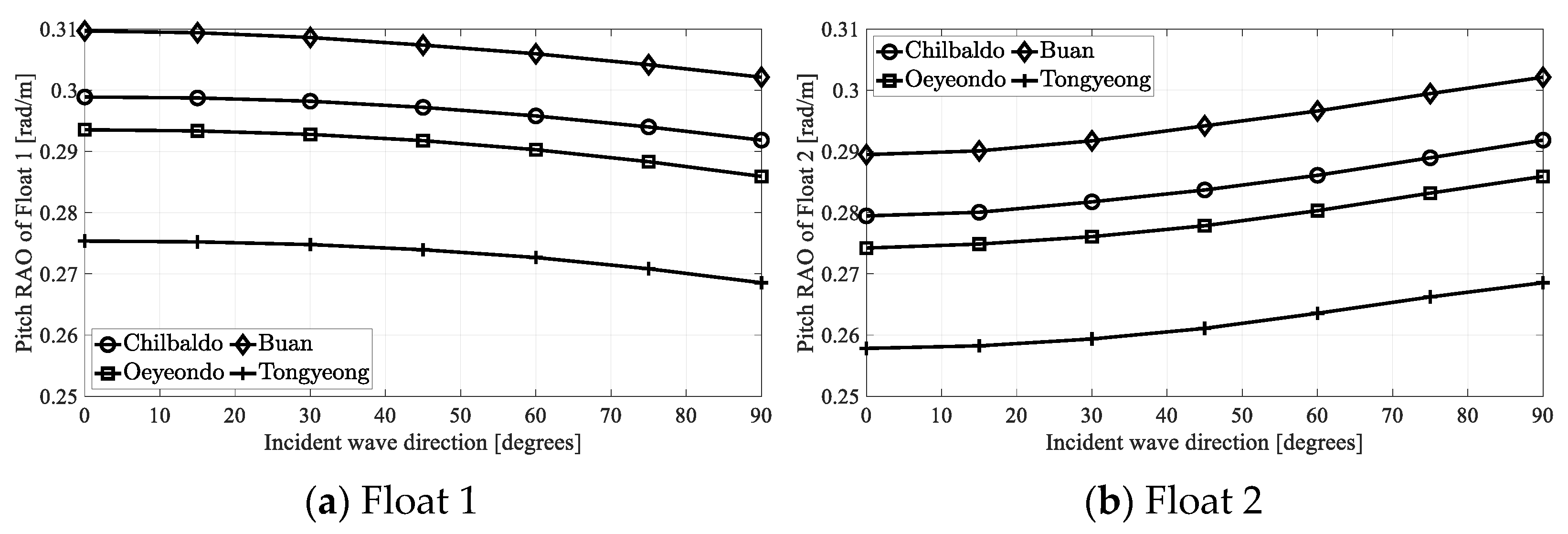
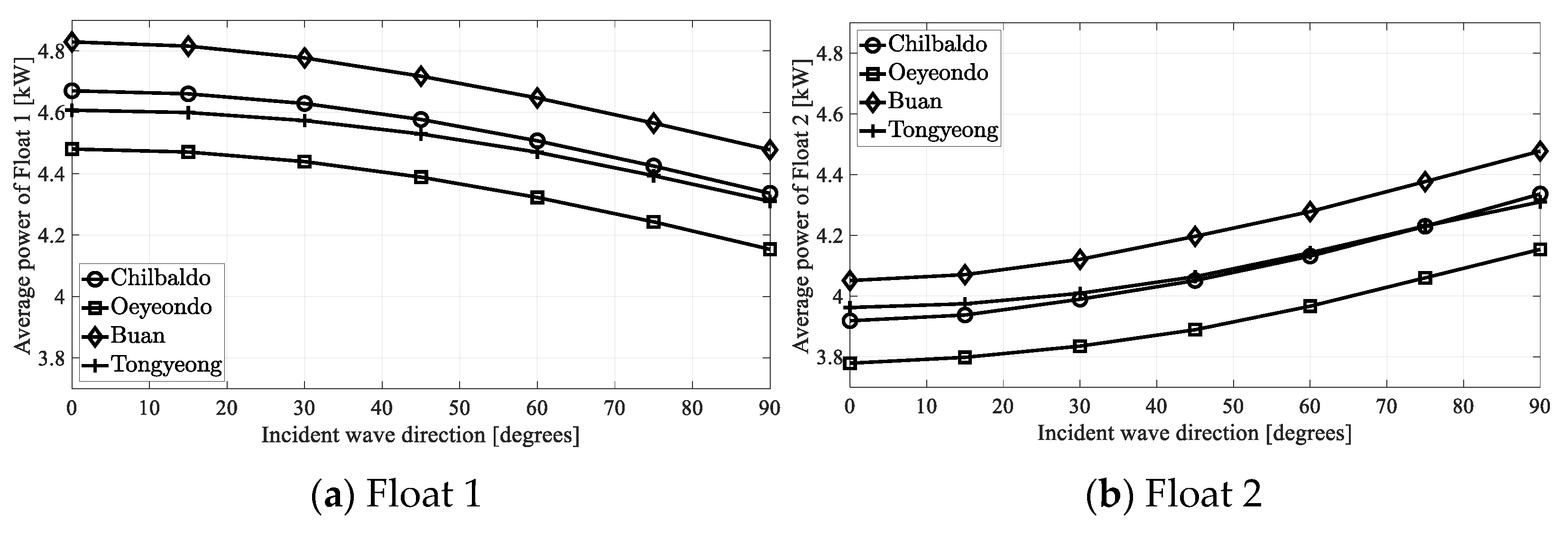
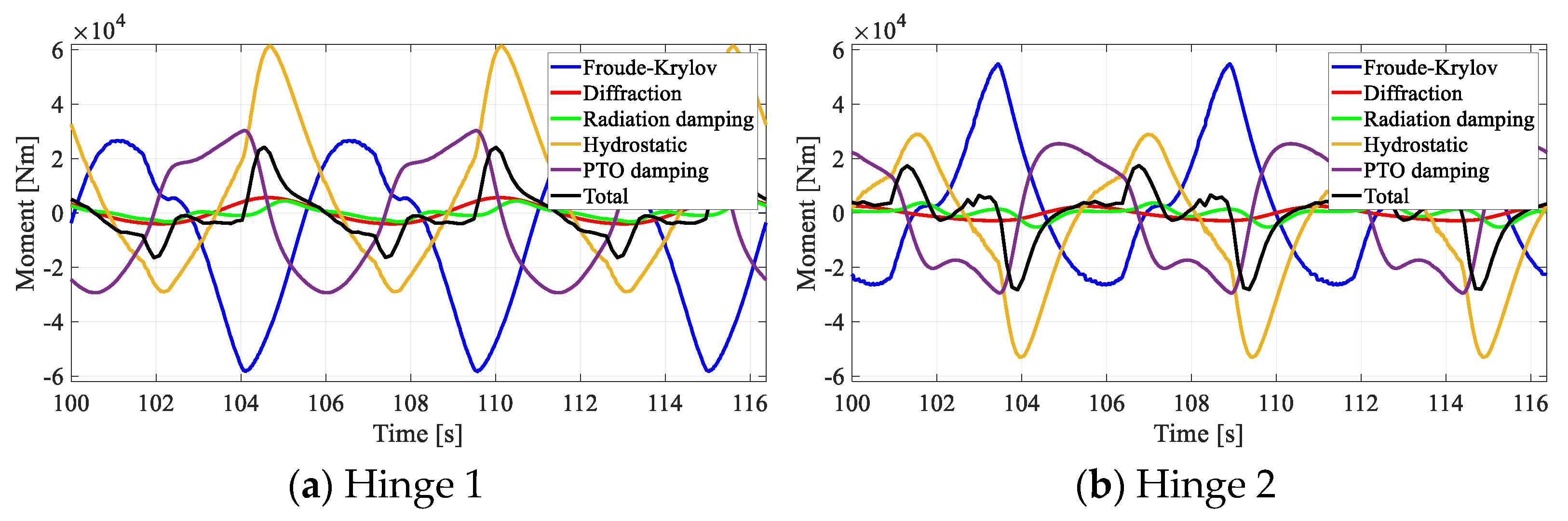
3.2.2. Two Hemispherical Floats
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Clément, A.; McCullen, P.; Falcão, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lew-is, T.; Nielsen, K.; Petroncini, S.; et al. Wave energy in europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. Eng. Part A J. Power Energy 2009, 223, 887–902. [Google Scholar] [CrossRef] [Green Version]
- Falcão, A. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Babarit, A.; Hals, J.; Muliawan, M.; Kurniawan, A.; Moan, T.; Krokstad, J. Numerical bench-marking study of a selection of wave energy converters. Renew. Energy 2012, 41, 44–63. [Google Scholar] [CrossRef]
- Aderinto, T.; Hua, L. Ocean wave energy converters: Status and challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef] [Green Version]
- Sugiura, K.; Sawada, R.; Nemoto, Y.; Haraguchi, R.; Asai, T. Wave flume testing of an oscillating-body wave energy converter with a tuned inerter. Appl. Ocean Res. 2020, 98, 102127. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Chen, R.; Zhang, Y.; Wang, L.; Qin, J. A novel single-body system for direct-drive wave energy converter. Int. J. Energy Res. 2021, 45, 7057–7069. [Google Scholar] [CrossRef]
- Kramer, M.; Marquis, L.; Frigaard, P. Performance evaluation of the wavestar prototype. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Karimirad, M. Offshore Energy Structures: For Wind Power, Wave Energy and Hybrid Marine Platforms; Springer: Cham, Switzerland, 2014; pp. 223–249. [Google Scholar]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M. Nonlinear numerical modeling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Kim, S.J.; Koo, W.; Min, E.H.; Jang, H.; Youn, D.; Lee, B. Experimental Study on Hydrodynamic Performance and Wave Power Takeoff for Heaving Wave Energy Converter. J. Ocean Eng. Technol. 2016, 30, 361–366. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Kolios, A.; Cui, L.; Sheng, Q. Flexible multibody dynamics modelling of point-absorber wave energy converters. Renew. Energy 2018, 127, 790–801. [Google Scholar] [CrossRef]
- Heo, S.; Koo, W. Numerical procedures for dynamic response and reaction force analysis of a heaving-point absorber wave energy converter. Ocean Eng. 2020, 107070. [Google Scholar] [CrossRef]
- Ghafari, H.R.; Neisi, A.; Ghassemi, H.; Iranmanesh, M. Power production of the hybrid Wavestar point absorber mounted around the Hywind spar platform and its dynamic response. J. Renew. Sustain. Energy 2021, 13, 033308. [Google Scholar] [CrossRef]
- Korean Ministry of Trade, Industry and Energy. New and Renewable Energy 3020 Implementation Plan; Korean Ministry of Trade, Industry and Energy: Sejong-si, Korea, 2017. (In Korean)
- Korean Ministry of Trade, Industry and Energy. The 8th Basic Plan for Long-Term Electricity Supply and Demand (2017–2031); Korean Ministry of Trade, Industry and Energy: Sejong-si, Korea, 2017.
- Singh, P.M.; Chen, Z.; Choi, Y.D. 15kW-class wave energy converter floater design and structural analysis. J. Korean Soc. Mar. Eng. 2016, 40, 146–151. [Google Scholar] [CrossRef]
- Kim, G.; Jeong, W.M.; Lee, K.S.; Jun, K.; Lee, M.E. Offshore and nearshore wave energy assessment around the Korean Peninsula. Energy 2011, 36, 1460–1469. [Google Scholar] [CrossRef]
- Kim, G.; Lee, M.E.; Lee, K.S.; Park, J.S.; Jeong, W.M.; Kang, S.K.; Soh, J.G.; Kim, H. An overview of ocean renewable energy resources in Korea. Renew. Sustain. Energy Rev. 2012, 16, 2278–2288. [Google Scholar] [CrossRef]
- Eum, H.S.; Jeong, W.M.; Chang, Y.S.; Oh, S.H.; Park, J.J. Wave Energy in Korean Seas from 12-Year Wave Hindcasting. J. Mar. Sci. Eng. 2020, 8, 161. [Google Scholar] [CrossRef] [Green Version]
- Ahn, S.; Ha, T. Characterization of wave energy resource hotspots and dominant wave energy systems in South Korean coastal waters. J. Clean. Prod. 2021, 309, 127202. [Google Scholar] [CrossRef]
- Kim, J.; Kweon, H.M.; Jeong, W.M.; Cho, I.H.; Cho, H.Y. Design of the dual-buoy wave energy converter based on actual wave data of East Sea. Int. J. Naval Arch. Ocean Eng. 2015, 7, 739–749. [Google Scholar] [CrossRef] [Green Version]
- Ko, H.S.; Kim, S.; Bae, Y.H. Study on Optimum Power Take-Off Torque of an Asymmetric Wave Energy Converter in Western Sea of Jeju Island. Energies 2021, 14, 1449. [Google Scholar] [CrossRef]
- Kim, S.J.; Koo, W. Numerical Study on a Multibuoy-Type Wave Energy Converter with Hydraulic PTO System Under Real Sea Conditions. IEEE J. Ocean. Eng. 2021, 46, 573–582. [Google Scholar] [CrossRef]
- Lee, C.H. WAMIT Theory Manual. Report No. 95-2; Department of Ocean Engineering, Massachusetts Institute of Technology: Cambridge, MA, USA, 1995. [Google Scholar]
- Shabana, A.A.; Hussein, B.A. A two-loop sparse matrix numerical integration procedure for the solution of differential/algebraic equations: Application to multibody systems. J. Sound Vib. 2009, 327, 557–563. [Google Scholar] [CrossRef]
- Park, J.H.; Shin, M.S.; Jeon, Y.H.; Kim, Y.G. Simulation-Based Prediction of Steady Turning Ability of a Symmetrical Underwater Vehicle Considering Interactions Between Yaw Rate and Drift/Rudder Angle. J. Ocean Eng. Technol. 2021, 35, 99–112. [Google Scholar] [CrossRef]
- Shabana, A.A. Dynamics of Multibody Systems, 4th ed.; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Zhang, L.; Zhang, D. A two-loop procedure based on implicit Runge–Kutta method for index-3 DAE of constrained dynamic problems. Nonlinear Dyn. 2016, 85, 263–280. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, D.G.; Li, L.; Zhang, L. Application of the two-loop procedure in multibody dynamics with contact and constraint. J. Sound Vib. 2018, 427, 15–27. [Google Scholar] [CrossRef]
- Penalba, M.; Giorgi, G.; Ringwood, J.V. Mathematical modelling of wave energy converters: A review of nonlinear approaches. Renew. Sustain. Energy Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef] [Green Version]
- Giorgi, G.; Penalba, M.; Ringwood, J. Nonlinear hydrodynamic models for heaving buoy wave energy converters. In Proceedings of the 3rd Asian Wave and Tidal Energy Conference, Singapore, 25–27 October 2016; pp. 144–153. [Google Scholar]
- Cummins, W.E. The impulse response function and ship motions. In Proceedings of the Symposium on Ship Theory, Hamburg, Germany, 25–27 January 1962. [Google Scholar]
- Ogilvie, T. Recent progress towards the understanding and prediction of ship motions. In Fifth Symposium on Naval Hydrodynamics; 1964; Volume 1, pp. 2–5. Available online: https://repository.tudelft.nl/islandora/object/uuid:5accdabd-b484-4450-9613-e1d2c5ee211e?collection=research (accessed on 22 June 2021).
- Kim, D.; Poguluri, S.K.; Ko, H.S.; Lee, H.; Bae, Y.H. Numerical and experimental study on linear behavior of salter’s duck wave energy converter. J. Ocean Eng. Technol. 2019, 33, 116–122. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; Barradas-Berglind, J.J.; Yu, M.; van Rooij, M.; Prins, W.A.; Jayawardhana, B.; Vakis, A.I. Frequency-domain hydrodynamic modelling of dense and sparse arrays of wave energy converters. Renew. Energy 2019, 135, 775–788. [Google Scholar] [CrossRef]
- Wendt, F.F.; Yu, Y.-H.; Nielsen, K.; Ruehl, K.; Bunnik, T.; Touzon, I.; Nam, B.W.; Kim, J.S.; Kim, K.-H.; Janson, C.E.; et al. International Energy Agency Ocean Energy Systems Task 10 Wave Energy Converter Modelling Verification and Validation. In Proceedings of the 12th European Wave and Tidal Energy Conference, Technical Committee of the European Wave and Tidal Energy conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Flavià, F.F.; Babarit, A.; Clément, A.H. On the numerical modeling and optimization of a bottom-referenced heave-buoy array of wave energy converters. Int. J. Mar. Energy 2017, 19, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Korea Meteorological Administration, Portal for Korea Meteorological Open Data. Available online: https://data.kma.go.kr/data/sea/selectBuoyRltmList.do?pgmNo=52 (accessed on 22 June 2021). (In Korean).
- Cho, I.H. Effect of Internal Fluid Resonance on the Performance of a Floating OWC Device. J. Ocean Eng. Technol. 2021, 35, 216–228. [Google Scholar] [CrossRef]
- ANSYS. Aqwa Theory Manual; ANSYS, Inc.: Canonsburg, PA, USA, 2021. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force | Linear Analysis | Weakly Nonlinear Analysis | Fully Nonlinear Analysis |
|---|---|---|---|
| Froude–Krylov | Linear | Nonlinear | Nonlinear |
| Hydrostatic | Linear | Nonlinear | Nonlinear |
| Diffraction | Linear | Linear | Nonlinear |
| Radiation | Linear | Linear | Nonlinear |
| Buoy | Location | Water Depth (m) | Wave Height (m) | Wave Period (s) | Wave Steepness | Incident Wave Power (kW/m) | |
|---|---|---|---|---|---|---|---|
| Latitude | Longitude | ||||||
| Chilbaldo | 34°47′36″ N | 125°46′37″ E | 33 | 1.26 | 5.46 | 0.0273 | 8.508 |
| Oeyeondo | 36°15′00″ N | 125°45′00″ E | 47 | 1.23 | 5.43 | 0.0265 | 8.059 |
| Buan | 35°39′31″ N | 125°48′50″ E | 50 | 1.28 | 5.46 | 0.0275 | 8.764 |
| Tongyeong | 34°23′30″ N | 128°13′30″ E | 55 | 1.24 | 5.38 | 0.0275 | 8.108 |
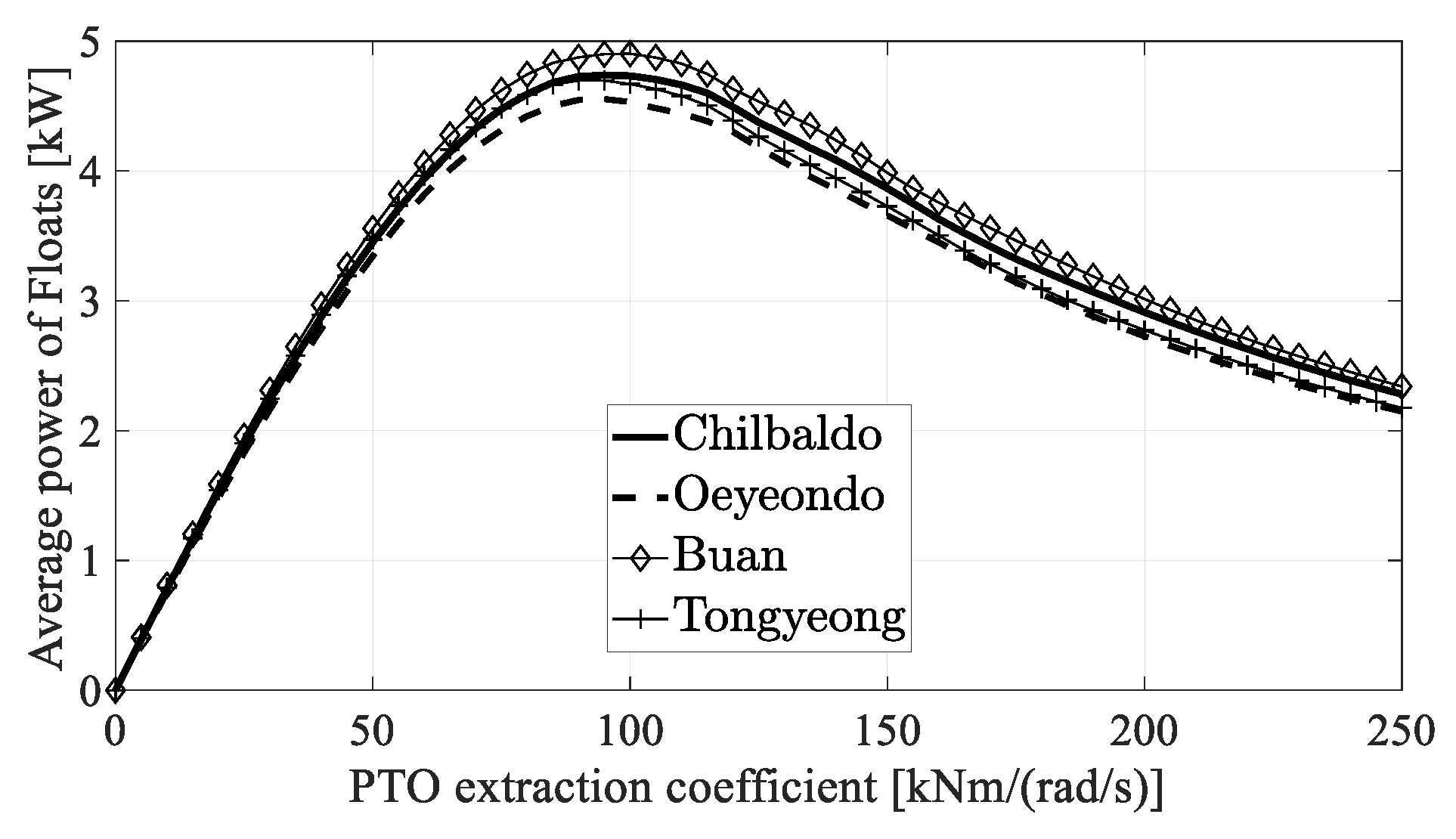
| Location | Optimal Extraction Coefficient (kNm/(rad/s)) |
|---|---|
| Chilbaldo | 95.0 |
| Oeyeondo | 95.0 |
| Buan | 100.0 |
| Tongyeong | 90.0 |
| Location | Average Power (kW) | CWR | Maximum Power (kW) |
|---|---|---|---|
| Chilbaldo | 4.738 | 0.278 | 9.572 |
| Oeyeondo | 4.554 | 0.283 | 9.077 |
| Buan | 4.900 | 0.280 | 9.959 |
| Tongyeong | 4.697 | 0.290 | 9.382 |
| Location | Average Power (kW) | CWR | Peak Power (kW) | |||
|---|---|---|---|---|---|---|
| Float 1 | Float 2 | Float 1 | Float 2 | Float 1 | Float 2 | |
| Chilbaldo | 4.61 | 3.92 | 0.271 | 0.230 | 9.29 | 8.75 |
| Oeyeondo | 4.48 | 3.78 | 0.278 | 0.235 | 8.81 | 8.35 |
| Buan | 4.83 | 4.05 | 0.276 | 0.231 | 9.67 | 9.14 |
| Tongyeong | 4.61 | 3.96 | 0.284 | 0.244 | 9.10 | 8.69 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heo, S.; Koo, W. Dynamic Response Analysis of a Wavestar-Type Wave Energy Converter Using Augmented Formulation in Korean Nearshore Areas. Processes 2021, 9, 1721. https://doi.org/10.3390/pr9101721
Heo S, Koo W. Dynamic Response Analysis of a Wavestar-Type Wave Energy Converter Using Augmented Formulation in Korean Nearshore Areas. Processes. 2021; 9(10):1721. https://doi.org/10.3390/pr9101721
Chicago/Turabian StyleHeo, Sanghwan, and Weoncheol Koo. 2021. "Dynamic Response Analysis of a Wavestar-Type Wave Energy Converter Using Augmented Formulation in Korean Nearshore Areas" Processes 9, no. 10: 1721. https://doi.org/10.3390/pr9101721
APA StyleHeo, S., & Koo, W. (2021). Dynamic Response Analysis of a Wavestar-Type Wave Energy Converter Using Augmented Formulation in Korean Nearshore Areas. Processes, 9(10), 1721. https://doi.org/10.3390/pr9101721