Chaos Synchronization for Hyperchaotic Lorenz-Type System via Fuzzy-Based Sliding-Mode Observer


Abstract
:1. Introduction
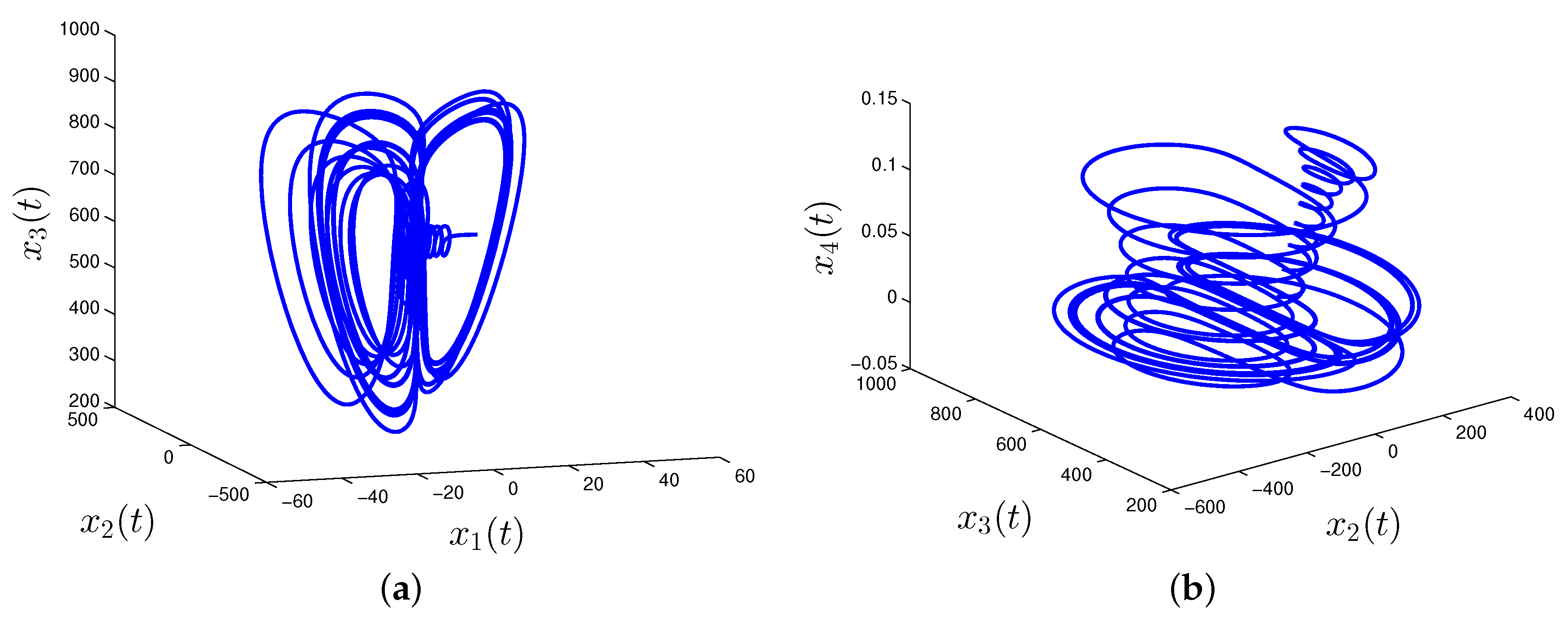
2. Mathematical Model
3. Observer Design
3.1. Stability Analysis
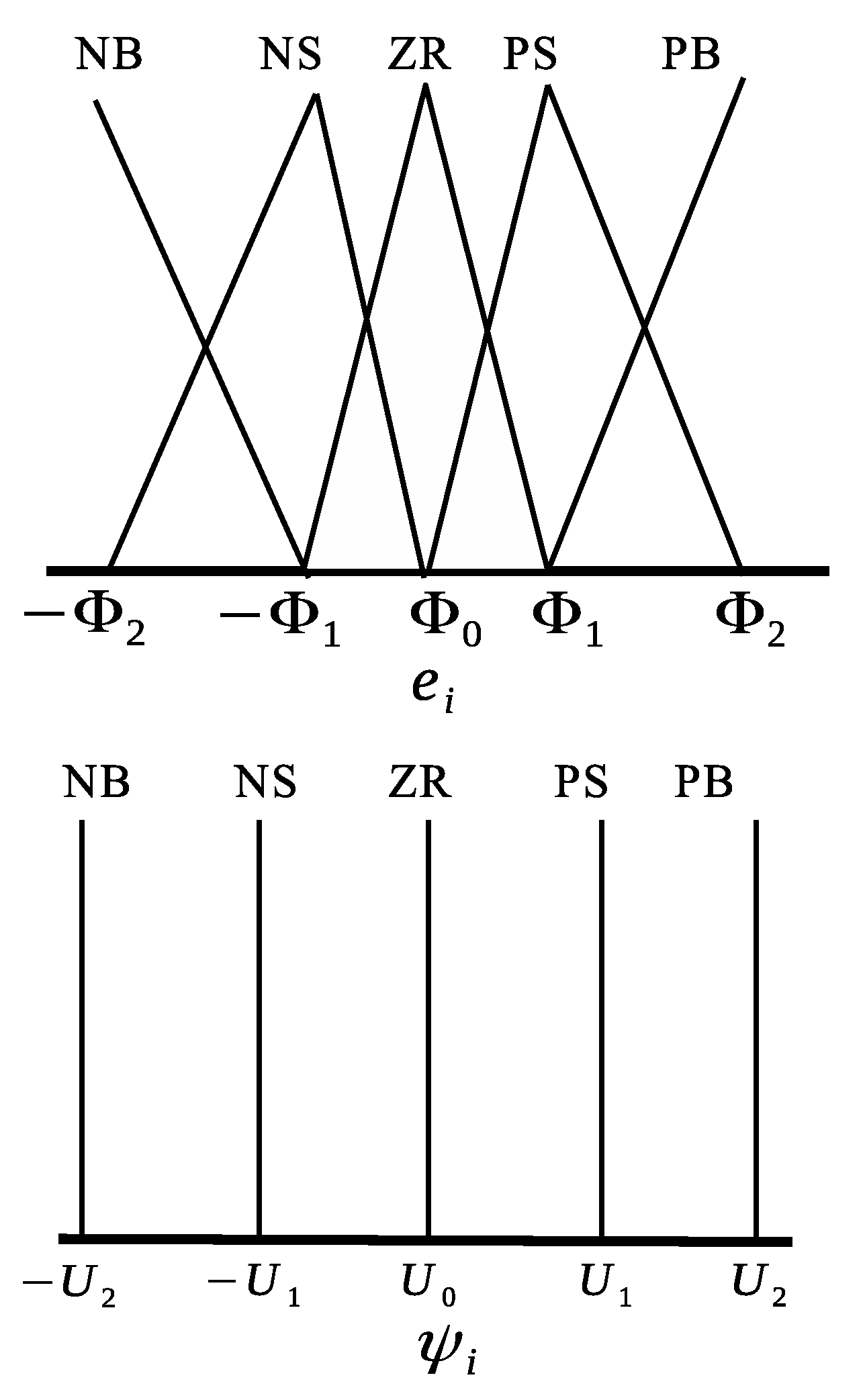
3.2. Fuzzy-Based Sliding-Mode Observer
- The states NB and PB represent the situation where error is too far from the origin in negative side and positive side, respectively.
- The states NS and PS represent the situation where error is in the negative side and positive side, respectively.
- The state ZR represents the situation when error is around the origin.
- (i)
- is continuous and bounded.
- (ii)
- .
- (iii)
- .
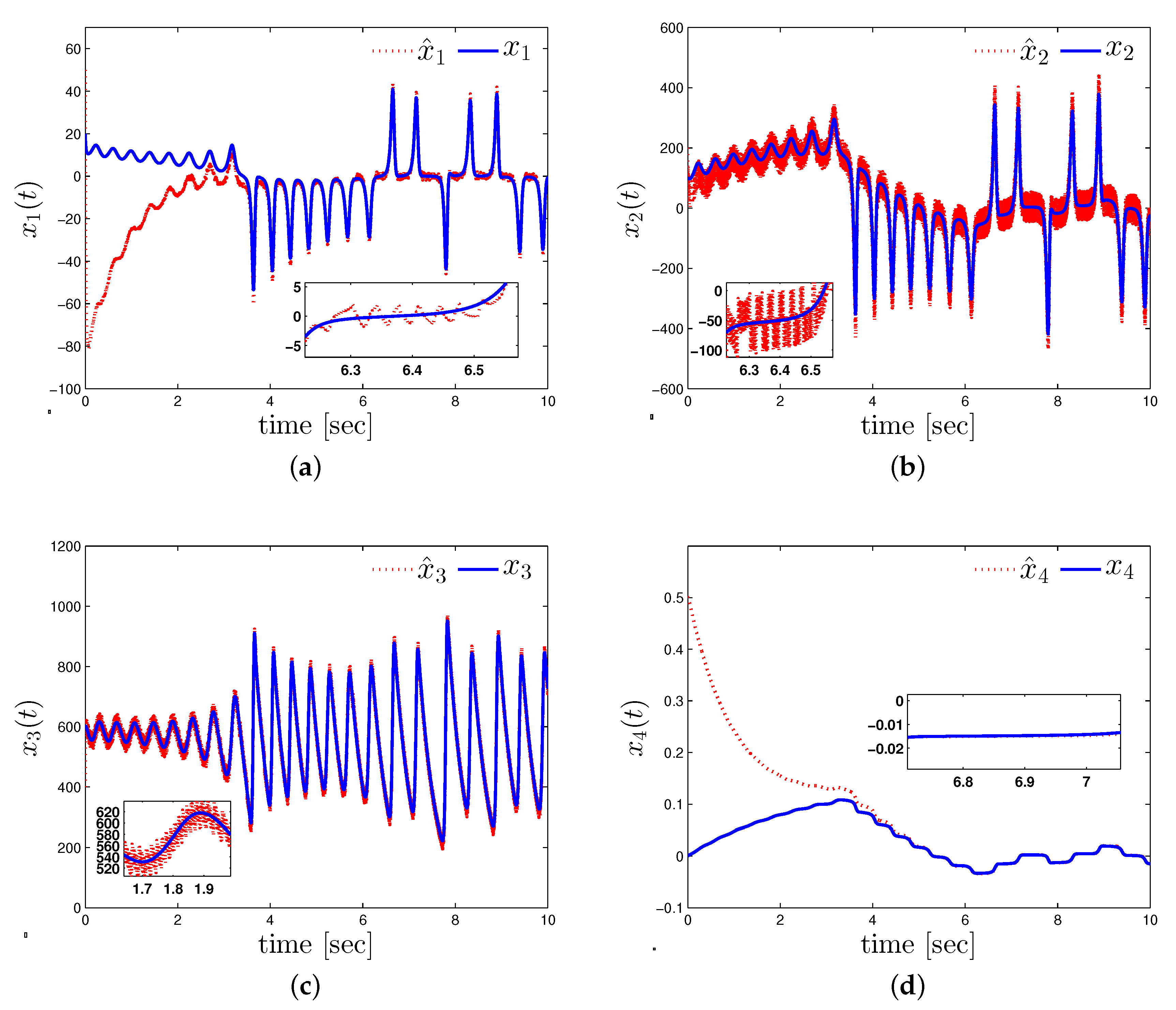
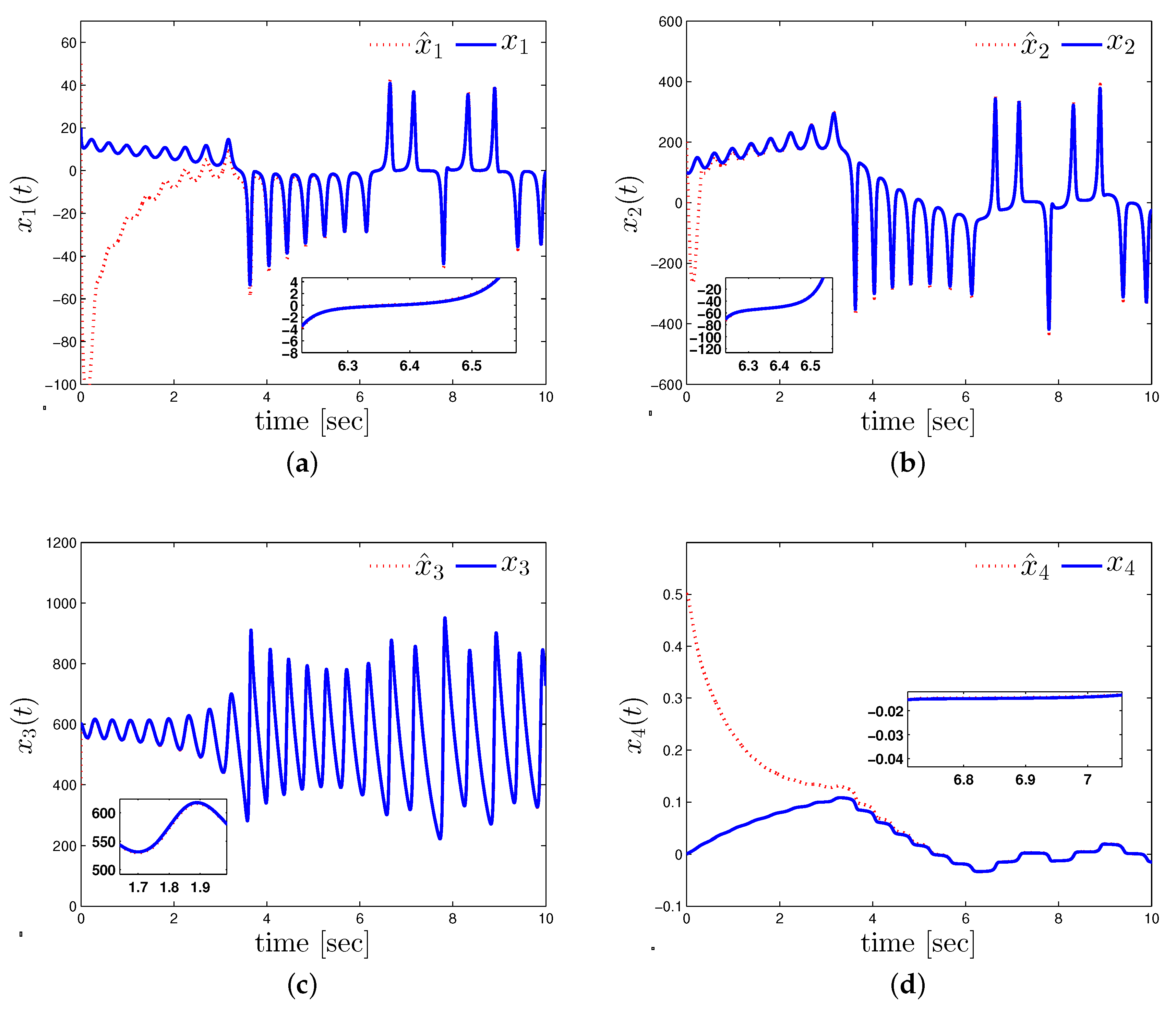
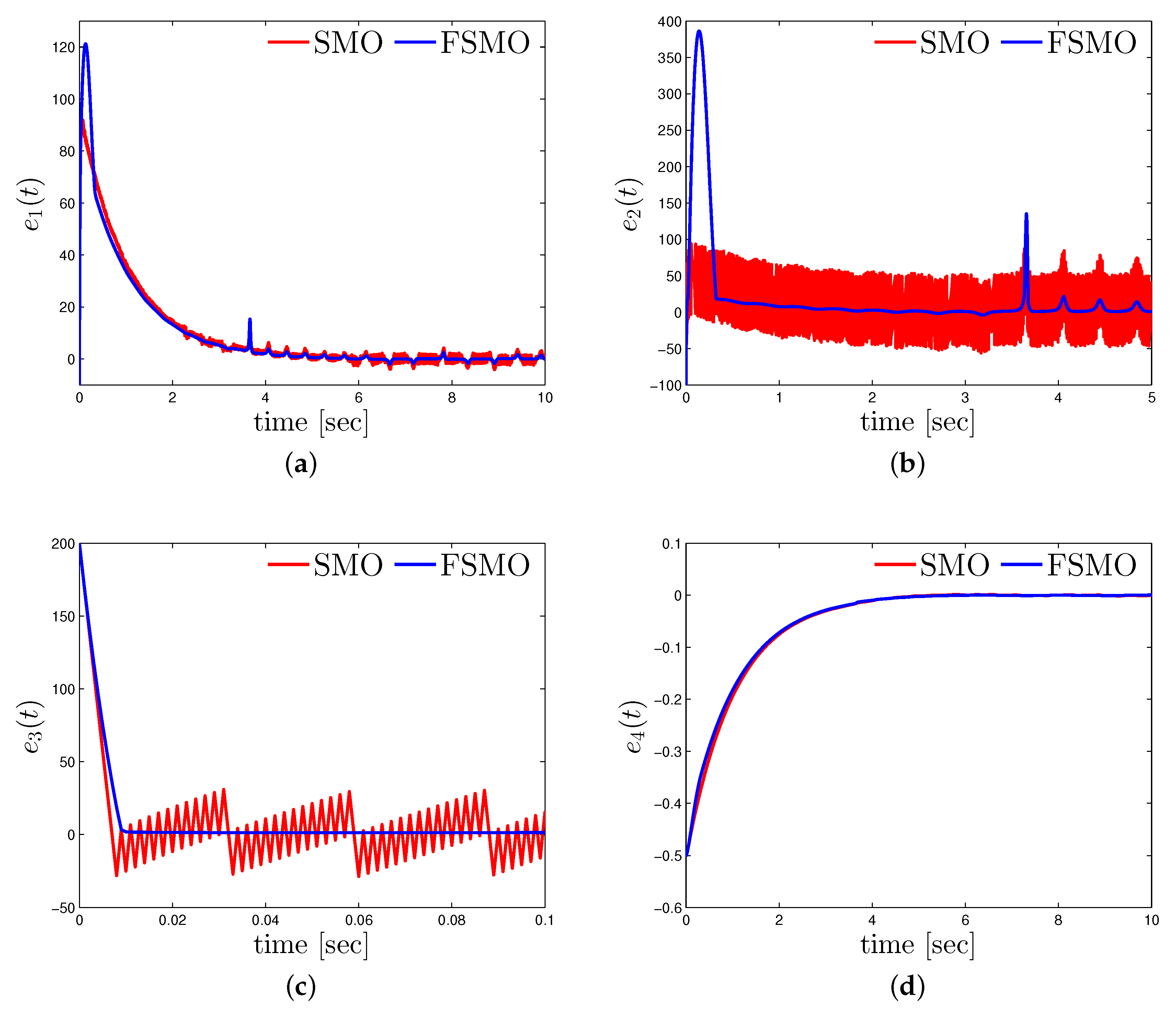
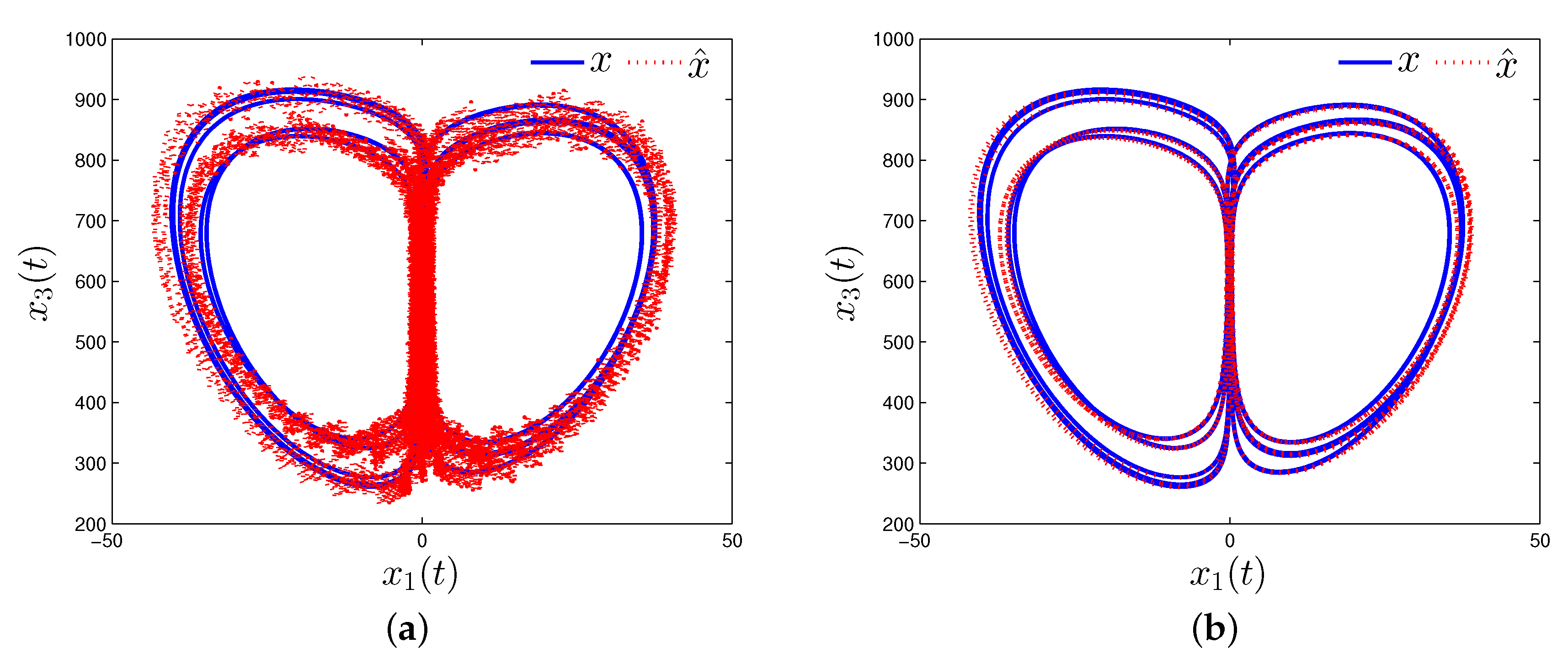
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ODE | Ordinary Differential Equations |
| FSMC | Fuzzy-based sliding-mode control |
| FSMO | Fuzzy-based sliding-mode observer |
| IAE | Integral Absolute Error |
| MAE | Mean Absolute Error |
| SMO | Sliding-Mode Observer |
References
- Pérez-Cruz, J.H.; Portilla-Flores, E.A.; Niño-Suárez, P.A.; Rivera-Blas, R. Design of a nonlinear controller and its intelligent optimization for exponential synchronization of a new chaotic system. Optik 2017, 130, 201–212. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Rossler, O.E. An equation for hyperchaos. Phys. Lett. A 1979, 71, 155–157. [Google Scholar] [CrossRef]
- Niu, Y.; Wang, X.; Wang, M.; Zhang, H. A new hyperchaotic system and its circuit implementation. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3518–3524. [Google Scholar]
- Vaidyanathan, S.; Sambas, A.; Mamat, M.; Sanjaya, W.M. A new three-dimensional chaotic system with a hidden attractor, circuit design and application in wireless mobile robot. Arch. Control Sci. 2017, 27, 541–554. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Yu, S.; Chen, B.; Xiao, L.; Lü, J. Design and SOPC-based realization of a video chaotic secure communication scheme. Int. J. Bifurc. Chaos 2018, 28, 1850160. [Google Scholar] [CrossRef]
- Abundiz-Pérez, F.; Cruz-Hernández, C.; Murillo-Escobar, M.A.; López-Gutiérrez, R.M.; Arellano-Delgado, A. A Fingerprint Image Encryption Scheme Based on Hyperchaotic Rössler Map. Math. Probl. Eng. 2016. [Google Scholar] [CrossRef] [Green Version]
- Morgül, Ö.; Solak, E. On the synchronization of chaos systems by using state observers. Int. J. Bifurc. Chaos 1997, 7, 1307–1322. [Google Scholar] [CrossRef]
- Starkov, K.E.; Coria, L.N.; Aguilar, L.T. On synchronization of chaotic systems based on the Thau observer design. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 17–25. [Google Scholar] [CrossRef]
- Vaidyanathan, S. Hyperchaos, adaptive control and synchronization of a novel 4-D hyperchaotic system with two quadratic nonlinearities. Arch. Control Sci. 2016, 26, 471–495. [Google Scholar] [CrossRef]
- Aguilar, L.; Ramírez-Villalobos, R.; Ferreira de Loza, A.; Coria, L. Robust sensorless speed tracking controller for surface-mount permanent magnet synchronous motors subjected to uncertain load variations. Int. J. Syst. Sci. 2020, 51, 35–48. [Google Scholar] [CrossRef]
- Abdullah, A. Synchronization and secure communication of uncertain chaotic systems based on full-order and reduced-order output-affine observers. Appl. Math. Comput. 2013, 219, 10000–10011. [Google Scholar] [CrossRef]
- Al-Saggaf, U.M.; Bettayeb, M.; Djennoune, S. Super-Twisting Algorithm-Based Sliding-Mode Observer for Synchronization of Nonlinear Incommensurate Fractional-Order Chaotic Systems Subject to Unknown Inputs. Arab. J. Sci. Eng. 2017, 42, 3065–3075. [Google Scholar] [CrossRef]
- Faieghi, M.; Baleanu, D. Sampled-data nonlinear observer design for chaos synchronization: A Lyapunov-based approach. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2444–2453. [Google Scholar] [CrossRef]
- Filali, R.L.; Benrejeb, M.; Borne, P. On observer-based secure communication design using discrete-time hyperchaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1424–1432. [Google Scholar] [CrossRef]
- Wang, B.; Zhong, S.; Dong, X. On the novel chaotic secure communication scheme design. Commun. Nonlinear Sci. Numer. Simul. 2016, 39, 108–117. [Google Scholar] [CrossRef]
- Kikuuwe, R. Anti-Noise and Anti-Disturbance Properties of Differential-Algebraic Relaxation Applied to a Set-Valued Controller. In Proceedings of the 2018 15th International Workshop on Variable Structure Systems (VSS), Graz, Austria, 9–11 July 2018; pp. 480–485. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Chen, S.; Luo, Y.; Pi, Y. PMSM sensorless control with separate control strategies and smooth switch from low speed to high speed. ISA Trans. 2015, 58, 650–658. [Google Scholar] [CrossRef]
- Boiko, I.M. Chattering in sliding-mode control systems with boundary layer approximation of discontinuous control. Int. J. Syst. Sci. 2013, 44, 1126–1133. [Google Scholar] [CrossRef]
- Suryawanshi, P.V.; Shendge, P.D.; Phadke, S.B. A boundary layer sliding-mode control design for chatter reduction using uncertainty and disturbance estimator. Int. J. Dyn. Control 2016, 4, 456–465. [Google Scholar] [CrossRef]
- Prieto, P.J.; Cazarez-Castro, N.R.; Aguilar, L.T.; Cardenas-Maciel, S.L.; Lopez-Renteria, J.A. A Lyapunov Analysis for Mamdani Type Fuzzy-Based Sliding Mode Control. IEEE Trans. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]
- Prieto, P.J.; Cazarez-Castro, N.R.; Aguilar, L.T.; Cardenas-Maciel, S.L. Chattering existence and attenuation in fuzzy-based sliding-mode control. Eng. Appl. Artif. Intell. 2017, 61, 152–160. [Google Scholar] [CrossRef]
- Layek, G.C.; Pati, N.C. Bifurcations and Hyperchaos in Magnetoconvection of Non-Newtonian Fluids. Int. J. Bifurc. Chaos 2018, 10, 1830034. [Google Scholar] [CrossRef]
- Prieto, P.J.; Cazarez-Castro, N.R.; Aguilar, L.T.; Garcia, D. Fuzzy slope adaptation for the sliding-mode control of a pneumatic parallel platform. Int. J. Fuzzy Syst. 2017, 19, 167–178. [Google Scholar] [CrossRef]
- Euntai, K.; Heejin, L.; Mignon, P. Limit-cycle prediction of a fuzzy control system based on describing function method. IEEE Trans. Fuzzy Syst. 2000, 8, 11–22. [Google Scholar] [CrossRef]
- Xiong, X.; Kikuuwe, R.; Kamal, S.; Jin, S. Implicit-Euler Implementation of Super-Twisting Observer and Twisting Controller for Second-Order Systems. IEEE Trans. Circuits Syst. II Express Br. 2019. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | MAE | IAE | ||
|---|---|---|---|---|
| SMO | FSMO | SMO | FSMO | |
| 2.0727 | 1.2836 | 2.0726 | 1.2835 | |
| 25.923 | 3.2871 | 2.5923 | 3.2866 | |
| 15.2191 | 1.6070 | 1.5218 | 1.606 | |
| 0.0057 | 0.0053 | 571.45 | 532.32 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plata, C.; Prieto, P.J.; Ramirez-Villalobos, R.; Coria, L.N. Chaos Synchronization for Hyperchaotic Lorenz-Type System via Fuzzy-Based Sliding-Mode Observer. Math. Comput. Appl. 2020, 25, 16. https://doi.org/10.3390/mca25010016
Plata C, Prieto PJ, Ramirez-Villalobos R, Coria LN. Chaos Synchronization for Hyperchaotic Lorenz-Type System via Fuzzy-Based Sliding-Mode Observer. Mathematical and Computational Applications. 2020; 25(1):16. https://doi.org/10.3390/mca25010016
Chicago/Turabian StylePlata, Corina, Pablo J. Prieto, Ramon Ramirez-Villalobos, and Luis N. Coria. 2020. "Chaos Synchronization for Hyperchaotic Lorenz-Type System via Fuzzy-Based Sliding-Mode Observer" Mathematical and Computational Applications 25, no. 1: 16. https://doi.org/10.3390/mca25010016
APA StylePlata, C., Prieto, P. J., Ramirez-Villalobos, R., & Coria, L. N. (2020). Chaos Synchronization for Hyperchaotic Lorenz-Type System via Fuzzy-Based Sliding-Mode Observer. Mathematical and Computational Applications, 25(1), 16. https://doi.org/10.3390/mca25010016