
Theory of Functional Connections Applied to Linear ODEs Subject to Integral Constraints and Linear Ordinary Integro-Differential Equations

 ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
2. Theory of Functional Connections Summary
3. TFC for ODEs with Integral Constraints
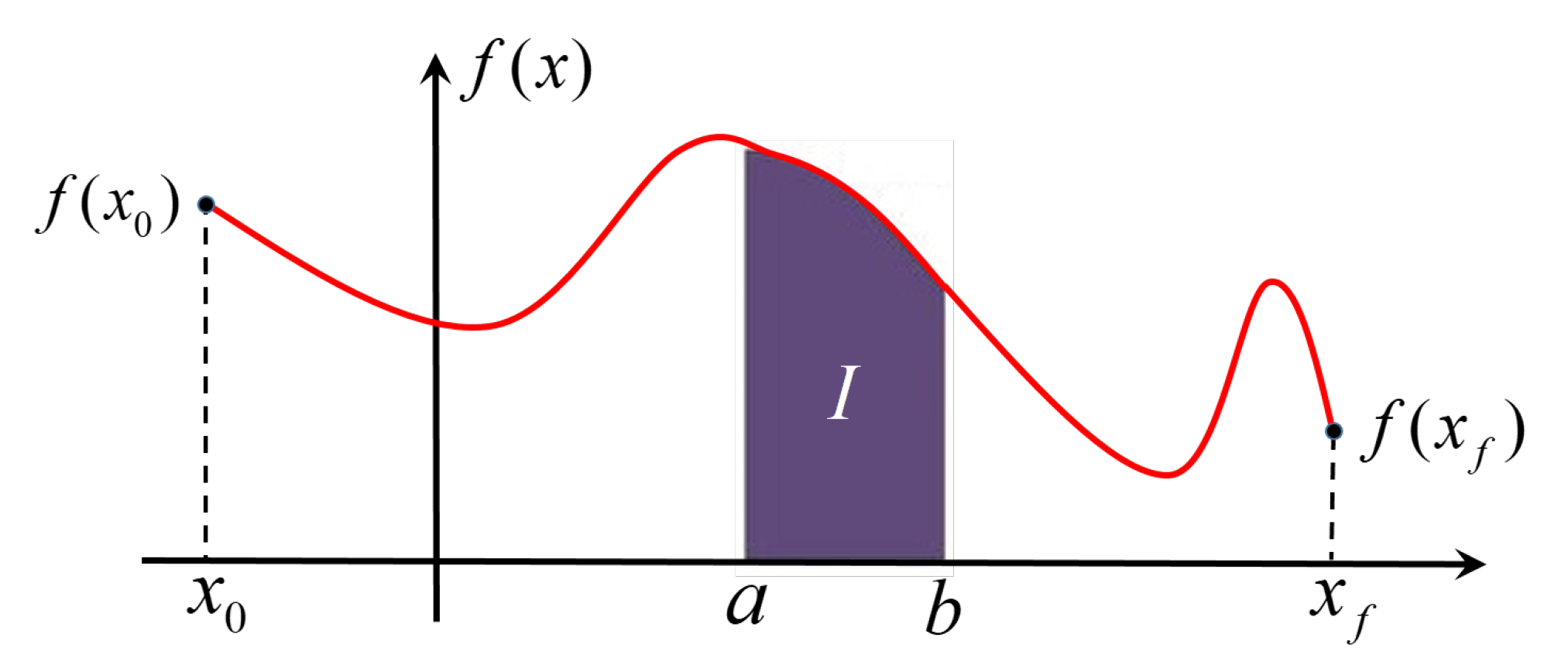
3.1. Definite Integral Constraint
3.2. Integral and Linear Constraints
Problem #1
3.3. Mixed Constraints
Problem #2
3.4. Discussions
4. TFC for Linear Ordinary Integro-Differential Equation
4.1. Problem #1
4.2. Problem #2
4.3. Problem #3
4.4. Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Chebyshev and Legendre Orthogonal Polynomials
Appendix A.1. Definition
Appendix A.2. Orthogonality
Appendix A.3. Derivatives
Appendix A.4. Integral
- Chebyshev indefinite.
- Chebyshev full range.
- Chebyshev internal range ()
- Legendre indefinite.
- Legendre full range.
- Legendre internal range ()
References
- Mortari, D. The theory of connections: Connecting points. Mathematics 2017, 5, 57. [Google Scholar] [CrossRef] [Green Version]
- Mortari, D.; Leake, C. The multivariate theory of connections. Mathematics 2019, 7, 296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnston, H.R. The Theory of Functional Connections: A Journey from Theory to Application. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2021. [Google Scholar]
- Leake, C.D. The Multivariate Theory of Functional Connections: An n-dimensional Constraint Embedding Technique Applied to Partial Differential Equations. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2021. [Google Scholar]
- Mortari, D. Least-squares solution of linear differential equations. Mathematics 2017, 5, 48. [Google Scholar] [CrossRef]
- Mortari, D.; Johnston, H.; Smith, L. High accuracy least-squares solutions of nonlinear differential equations. J. Comput. Appl. Math. 2019, 352, 293–307. [Google Scholar] [CrossRef]
- Mortari, D.; Furfaro, R. Univariate theory of functional connections applied to component constraints. Math. Comput. Appl. 2021, 26, 9. [Google Scholar]
- Leake, C.; Johnston, H.; Mortari, D. The multivariate theory of functional connections: Theory, proofs, and application in partial differential equations. Mathematics 2020, 8, 1303. [Google Scholar] [CrossRef]
- Schiassi, E.; Furfaro, R.; Leake, C.; De Florio, M.; Johnston, H.; Mortari, D. Extreme theory of functional connections: A fast physics-informed neural network method for solving ordinary and partial differential equations. Neurocomputing 2021, 457, 334–356. [Google Scholar] [CrossRef]
- Leake, C.; Mortari, D. Deep theory of functional connections: A new method for estimating the solutions of partial differential equations. Mach. Learn. Knowl. Extr. 2020, 2, 37–55. [Google Scholar] [CrossRef] [Green Version]
- Gil, A.; Segura, J.; Temme, N.M. Numerical Methods for Special Functions; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Lanczos, C. Applied Analysis; Courier Corporation: Chelmsford, MA, USA, 1988. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Wang, Y.; Topputo, F. A TFC-based homotopy continuation algorithm with application to dynamics and control problems. J. Comput. Appl. Math. 2021, 401, 113777. [Google Scholar] [CrossRef]
- Mortari, D.; Arnas, D. Bijective mapping analysis to extend the theory of functional connections to non-rectangular 2-dimensional domains. Mathematics 2020, 8, 1593. [Google Scholar] [CrossRef]
- Schiassi, E.; De Florio, M.; D’Ambrosio, A.; Mortari, D.; Furfaro, R. Physics-informed neural networks and functional interpolation for data-driven parameters discovery of epidemiological compartmental models. Mathematics 2021, 9, 2069. [Google Scholar] [CrossRef]
- De Florio, M.; Schiassi, E.; Furfaro, R.; Ganapol, B.D.; Mostacci, D. Solutions of Chandrasekhar’s basic problem in radiative transfer via theory of functional connections. J. Quant. Spectrosc. Radiat. Transf. 2021, 259, 107384. [Google Scholar] [CrossRef]
- De Florio, M.; Schiassi, E.; Ganapol, B.D.; Furfaro, R. Physics-informed neural networks for rarefied-gas dynamics: Thermal creep flow in the Bhatnagar–Gross–Krook approximation. Phys. Fluids 2021, 33, 047110. [Google Scholar] [CrossRef]
- Mai, T.; Mortari, D. Theory of functional connections applied to nonlinear programming under equality constraints. arXiv 2019, arXiv:1910.04917. [Google Scholar]
- Yassopoulos, C.; Leake, C.; Reddy, J.; Mortari, D. Analysis of Timoshenko–Ehrenfest beam problems using the theory of functional connections. Eng. Anal. Bound. Elem. 2021, 132, 271–280. [Google Scholar] [CrossRef]
- Johnston, H.; Mortari, D. Least-squares solutions of boundary-value problems in hybrid systems. J. Comput. Appl. Math. 2021, 393, 113524. [Google Scholar] [CrossRef]
- Johnston, H.; Leake, C.; Mortari, D. Least-squares solutions of eighth-order boundary value problems using the theory of functional connections. Mathematics 2020, 8, 397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leake, C.; Johnston, H.; Smith, L.; Mortari, D. Analytically embedding differential equation constraints into least squares support vector machines using the theory of functional connections. Mach. Learn. Knowl. Extr. 2019, 1, 1058–1083. [Google Scholar] [CrossRef] [Green Version]
- Rao, A.V. A survey of numerical methods for optimal control. Adv. Astronaut. Sci. 2009, 135, 497–528. [Google Scholar]
- De Almeida Junior, A.K.; Johnston, H.; Leake, C.; Mortari, D. Fast 2-impulse non-Keplerian orbit transfer using the theory of functional connections. Eur. Phys. J. Plus 2021, 136, 1–21. [Google Scholar] [CrossRef]
- Schiassi, E.; D’Ambrosio, A.; Johnston, H.; De Florio, M.; Drozd, K.; Furfaro, R.; Curti, F.; Mortari, D. Physics-informed extreme theory of functional connections applied to optimal orbit transfer. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Lake Tahoe, CA, USA, 9–13 August 2020; pp. 9–13. [Google Scholar]
- Johnston, H.; Mortari, D. Orbit propagation via the theory of functional connections. In Proceedings of the 2019 AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- De Almeida Junior, A.; Johnston, H.; Leake, C.; Mortari, D. Evaluation of transfer costs in the earth-moon system using the theory of functional connections. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Lake Tahoe, CA, USA, 9–13 August 2020. [Google Scholar]
- Drozd, K.; Furfaro, R.; Schiassi, E.; Johnston, H.; Mortari, D. Energy-optimal trajectory problems in relative motion solved via Theory of Functional Connections. Acta Astronaut. 2021, 182, 361–382. [Google Scholar] [CrossRef]
- Schiassi, E.; D’Ambrosio, A.; Johnston, H.; Furfaro, R.; Curti, F.; Mortari, D. Complete energy optimal landing on small and large planetary bodies via theory of functional connections. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Lake Tahoe, CA, USA, 9–13 August 2020; pp. 20–557. [Google Scholar]
- Johnston, H.; Schiassi, E.; Furfaro, R.; Mortari, D. Fuel-efficient powered descent guidance on large planetary bodies via theory of functional connections. J. Astronaut. Sci. 2020, 67, 1521–1552. [Google Scholar] [CrossRef] [PubMed]
- D’Ambrosio, A.; Schiassi, E.; Curti, F.; Furfaro, R. Pontryagin neural networks with functional interpolation for optimal intercept problems. Mathematics 2021, 9, 996. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Darania, P.; Ebadian, A. A method for the numerical solution of the integro-differential equations. Appl. Math. Comput. 2007, 188, 657–668. [Google Scholar] [CrossRef]
- Mishra, S.; Molinaro, R. Physics informed neural networks for simulating radiative transfer. J. Quant. Spectrosc. Radiat. Transf. 2021, 270, 107705. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TFC | X-TFC | |
|---|---|---|
| 0.0 | 0.0 | 0.0 |
| 0.1 | 0.0 | |
| 0.2 | 0.0 | |
| 0.3 | 0.0 | |
| 0.4 | 0.0 | |
| 0.5 | 0.0 | |
| 0.6 | ||
| 0.7 | ||
| 0.8 | ||
| 0.9 | ||
| 1.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Florio, M.; Schiassi, E.; D’Ambrosio, A.; Mortari, D.; Furfaro, R. Theory of Functional Connections Applied to Linear ODEs Subject to Integral Constraints and Linear Ordinary Integro-Differential Equations. Math. Comput. Appl. 2021, 26, 65. https://doi.org/10.3390/mca26030065
De Florio M, Schiassi E, D’Ambrosio A, Mortari D, Furfaro R. Theory of Functional Connections Applied to Linear ODEs Subject to Integral Constraints and Linear Ordinary Integro-Differential Equations. Mathematical and Computational Applications. 2021; 26(3):65. https://doi.org/10.3390/mca26030065
Chicago/Turabian StyleDe Florio, Mario, Enrico Schiassi, Andrea D’Ambrosio, Daniele Mortari, and Roberto Furfaro. 2021. "Theory of Functional Connections Applied to Linear ODEs Subject to Integral Constraints and Linear Ordinary Integro-Differential Equations" Mathematical and Computational Applications 26, no. 3: 65. https://doi.org/10.3390/mca26030065
APA StyleDe Florio, M., Schiassi, E., D’Ambrosio, A., Mortari, D., & Furfaro, R. (2021). Theory of Functional Connections Applied to Linear ODEs Subject to Integral Constraints and Linear Ordinary Integro-Differential Equations. Mathematical and Computational Applications, 26(3), 65. https://doi.org/10.3390/mca26030065