1. Introduction
The design optimization mostly keeps design variables and parameters deterministic. It ignores the fact that uncertainties can arise owing to manufacturing variations, dimensional inaccuracy, boundary conditions, material properties, and improper loading conditions, which can lead to the infeasibility of the solution obtained through deterministic optimization. Therefore, it is necessary to consider these uncertainties in designing the process to maintain safety and the quality of the solution. Reliability-based design optimization (RBDO) [
1,
2] is a mathematical tool that is used for obtaining such reliable optimal solutions for problems involving uncertainties. It also enables engineers to identify solutions effectively for complex applications in the fields of the automotive, civil, mechanical, and aerospace industries [
3,
4]. In RBDO, the uncertainties are manifested by converting the deterministic constraints to probabilistic constraints. This is accomplished by applying a probability operator to performance functions or to limit-state functions in the literature. A generalized single-objective RBDO formulation is given in Equation (
1).
where
is the objective function,
is the
i-th performance/constraint function, and
is the mean value vector of random variable vector
, where
n is the number of random design variables.
L and
U in the superscript of
represent the lower and upper limits of the vector.
represents the standard normal cumulative distribution function,
is the target reliability index of the
i-th performance function, and
is the probability operator that represents the failure probability of performance function (
) that should be less than the target failure probability (
).
Equation (
1) demonstrates that solving a single-objective RBDO requires a nested-loop procedure [
2], where the outer optimization loop involves the inner-loop for reliability analysis. The reliability analysis can be performed using simulation-based methods [
5] and analytical methods [
6] on probabilistic performance function to obtain its failure probability. The simulation-based methods show better accuracy with an expense of computational cost [
7], such as Monte Carlo simulation (MCS) [
5], subset simulation [
8], importance sampling [
9], and Latin-hypercube sampling [
9]. On the other hand, analytical methods are known for their computational efficiency, such as most-probable point (MPP)-based methods, in which the sub-optimization problem is solved for each performance function to obtain their respective MPP. The MPP-based methods can be broadly divided into the performance measurement approach (PMA) [
10] and the reliability index approach (RIA) [
6]. The optimum solution obtained using PMA and RIA is known as the most probable target point (MPTP) and the most probable failure point (MPFP), respectively. Many advanced methods have been developed to estimate the MPTP and MPFP of performance functions, and they are categorized as double-loop methods, decoupled-loop methods, and single-loop methods.
The classical double-loop methods [
11,
12] involve a nested optimization loop, where the inner-loop performs reliability analysis and the outer-loop is used for obtaining design solutions. All the random variables are transformed to standard normal variables [
13] for performing reliability analysis. Since the nested optimization loop is computationally expensive, the reliability analysis loop (inner-loop) is decoupled and performed separately in decoupled-loop methods [
14,
15,
16,
17]. Some advanced and efficient reliability-based frameworks were also proposed based on isogeometric analysis [
18,
19]. The reliability analysis itself is considered as an computationally expensive procedure. Therefore, single-loop methods [
20] have been proposed, in which approximate reliability analysis is performed. Different concepts such as Karush-Kuhn Tucker (KKT) conditions and quantile approximation are used to approximate MPTP that can eliminate the reliability analysis loop. The adaptive conjugate single-loop approach (AC-SLA) [
21], the enhanced single-loop method (ESM) [
22], the chaotic single-loop approach (CSLA) [
23], the single-loop shifting vector method (SLShV-CG) [
24], the sequential single-loop reliability optimization and confidence analysis method (SROCA) [
25], and the approximate single-loop chaos control method (ASLCC) [
26] are a few recently developed single-loop methods. Recently, some efficient evolutionary RBDO methods are also proposed to obtain the global reliable solution [
27,
28].
It has been found that many real-world engineering problems consist of more than one objective, which are conflicting in nature [
29], and can also have uncertainties. Evolutionary algorithms are found to be promising for solving deterministic multi-objective optimization problems (MOOPs) because they can generate Pareto-optimal (PO) solutions in one run. However, these evolutionary algorithms need to be modified for generating reliable PO solutions for multi-objective reliability-based design optimization (MORBDO) problems. To address uncertainty in MORBDO, Deb et al. [
3] used a non-dominated sorting genetic algorithm (NSGA-II) [
30] for design optimization, and Fast RIA for reliability analysis. A multi-objective differential evolution (MODE) [
31] was also implemented as a design optimization algorithm, and inverse reliability was performed. Simulation-based techniques are also used for reliability analysis and are coupled with double-loop methods. For example, a radial basis function was used for approximating the responses of the performance function and was coupled with MCS to implement reliability analysis. NSGA-II was used to obtain PO solutions for solving the multi-objective and multi-case [
32] RBDO problem. In another study, MCS and NSGA-II were coupled with entropy weighted grey relational analysis for design optimization [
33] to solve the control arm problem. The multi-objective optimization design of the control arm was carried out using the Kriging surrogate model. Sun et al. [
34] proposed a radial basis function-based surrogate modeling that was implemented with Latin-hypercube sampling for sensitivity analysis. MCS and multi-objective particle swarm optimization (PSO) were coupled for obtaining the reliable PO solutions. In another study, a multiple response surface method-based artificial neural network was implemented for reliability analysis [
35], and a dynamic multi-objective particle swarm optimization algorithm was proposed for obtaining PO solutions. A worst-case scenario was used with fuzzy sets for reliability analysis, and a real-coded population-based incremental learning [
36] was implemented with DE for obtaining the PO solutions. A multi-objective robust optimization [
37] was proposed, in which the design problems consisted of parametric uncertainties involving both random and interval variables. NSGA-II was implemented to generate robust PO solutions, and MCS was performed to evaluate the impact responses of the mixed uncertainties. Constrained NSGA-II was also implemented to solve the MORBDO problem [
38]. It was coupled with the hybrid method using the Kriging surrogate metamodel for reliability analysis.
A time-dependent reliability-based robust design optimization (TRBRDO) problem [
39] was solved using NSGA-III [
40] and the dimension reduction method. It was developed by constructing an extreme value model using the sparse grid-based stochastic collocation method for time-dependent reliability analysis. A Bayesian multi-objective RBDO [
41] was proposed to solve problems involving aleatory and epistemic uncertainties. Multi-objective PSO was implemented for obtaining PO solutions, and Bayesian interference was used for reliability analysis. Another method using nested loop was proposed to solve RBDO problems [
42], in which the outer-loop was performed using multi-objective PSO, and the inner-loop was solved using surrogate modeling with MCS sampling. A two-layer nested optimization problem was proposed based on a decoupling strategy. The inter-generation projection genetic algorithm was employed in the inner-loop, and the multi-objective genetic algorithm [
43] was implemented at the outer-loop for solving the MORBDO problem. Another multi-objective RBDO [
44] was solved by converting it into a single-objective RBDO problem. This was achieved by assigning weights to the objectives based on quantitative analysis and evidence theory. The reliability analysis was estimated using the PMA method.
From the literature, it can be seen that most of the MORBDO methods focus on PMA, RIA, MCS, or surrogate modeling for reliability analysis, and they are based on double-loop or decoupled-loop methods, which make them computationally expensive. Since evolutionary algorithms are population-based methods and require many functional evaluations, a single-loop method for solving MORBDO can improve the computational efficiency. Moreover, single-loop methods that are solved using steepest descent search to estimate MPTP are often stuck with periodic oscillation [
26,
45] for highly nonlinear functions. This leads to the motivation of this paper, in which a new MORBDO formulation is proposed, based on adaptive multi-objective DE. An adaptive mutation scheme is used for selecting different variants of mutations for exploration in the search space. Both trial and target vectors take part in the MORBDO formulation to estimate the reliable PO solutions. The following are the contributions of the paper.
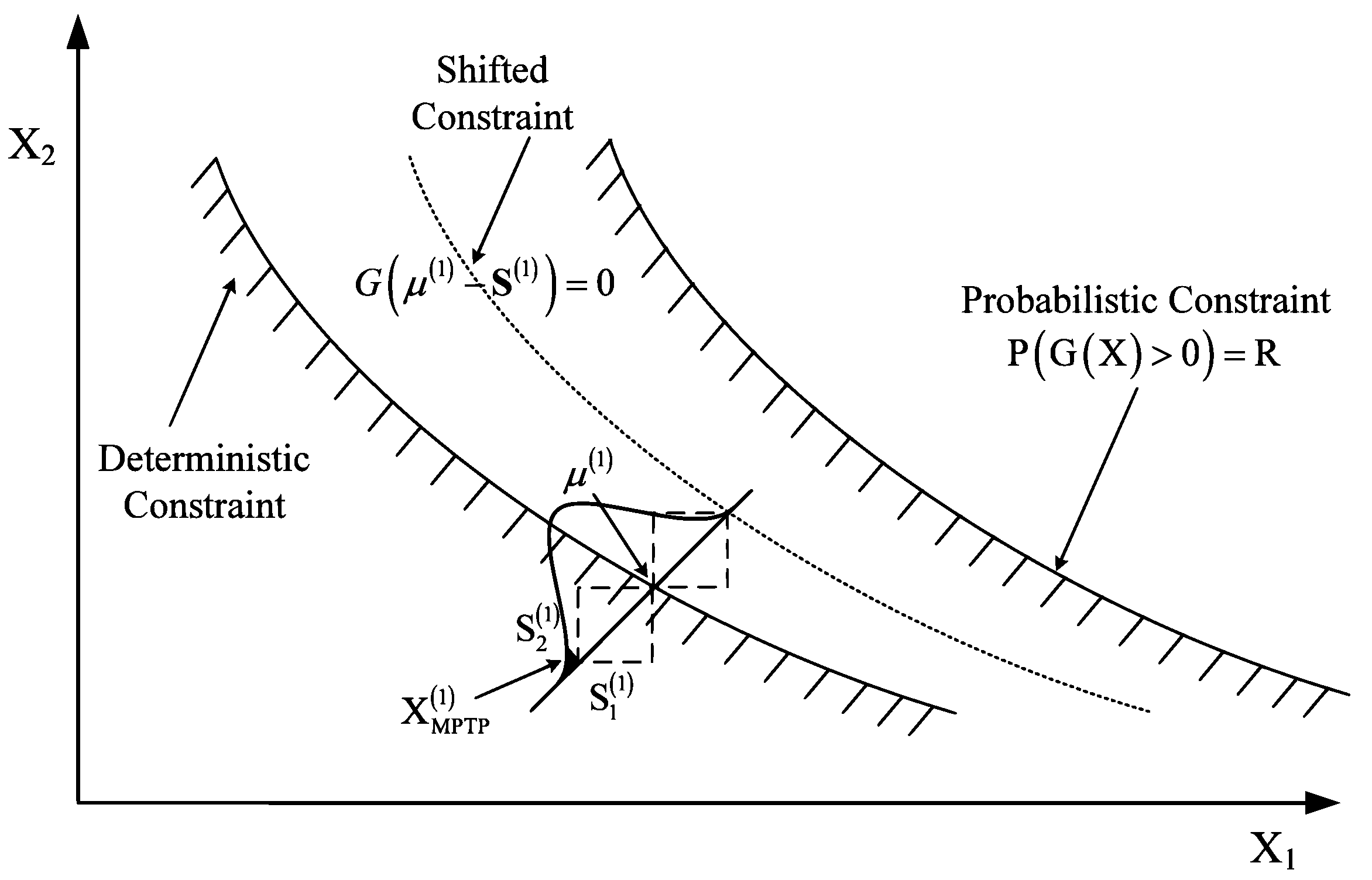
A single-loop MORBDO formulation is developed by using a shifting vector approach for achieving feasibility quickly, and by using chaos control theory for estimating MPTP effectively for better convergence.
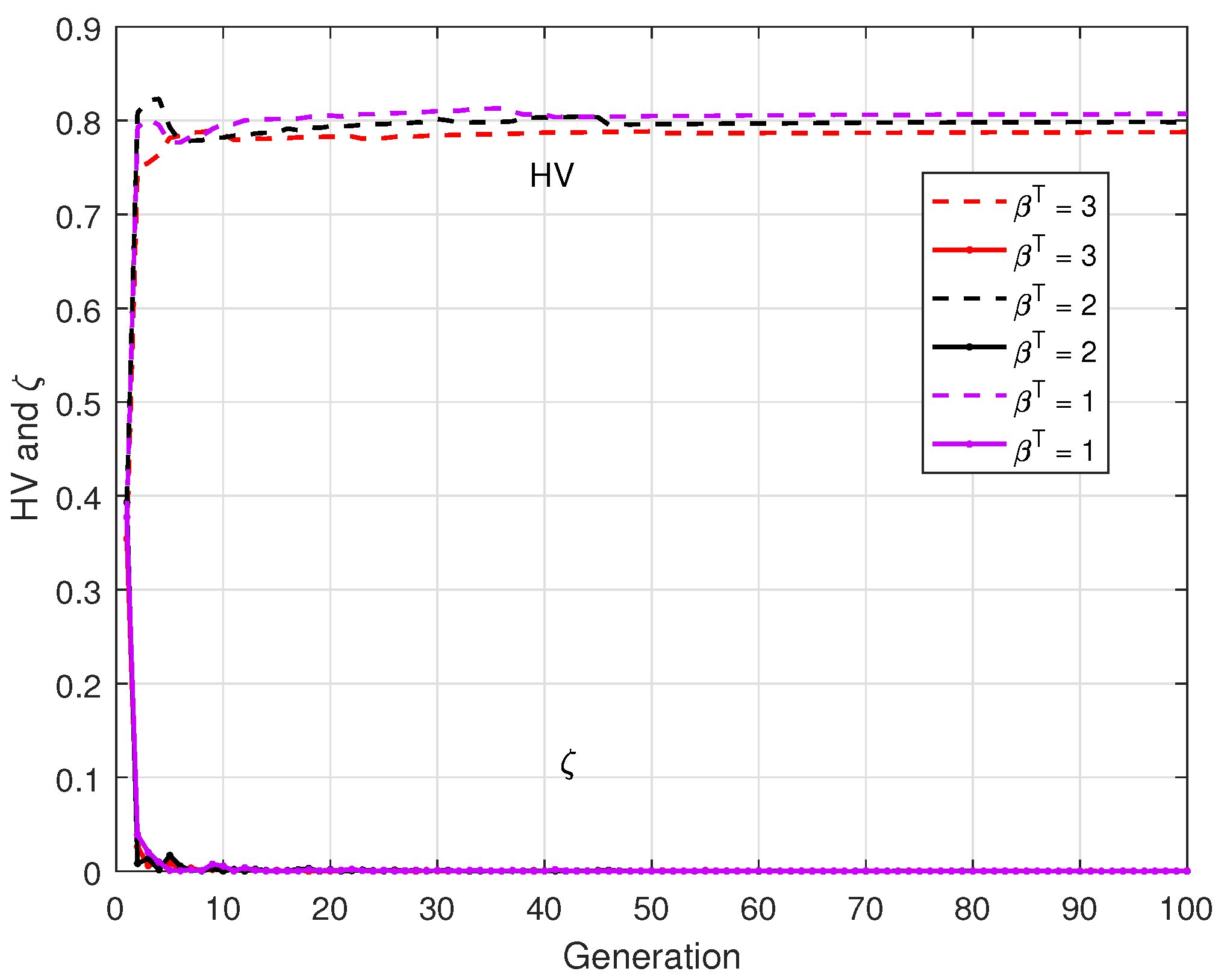
An adaptive multi-objective differential evolution is developed by performing two variants of mutation by estimating a heuristic parameter through hypervolume computation.
The formulation is further developed by incorporating target and trial vectors of differential evolution for better exploration of the search space.
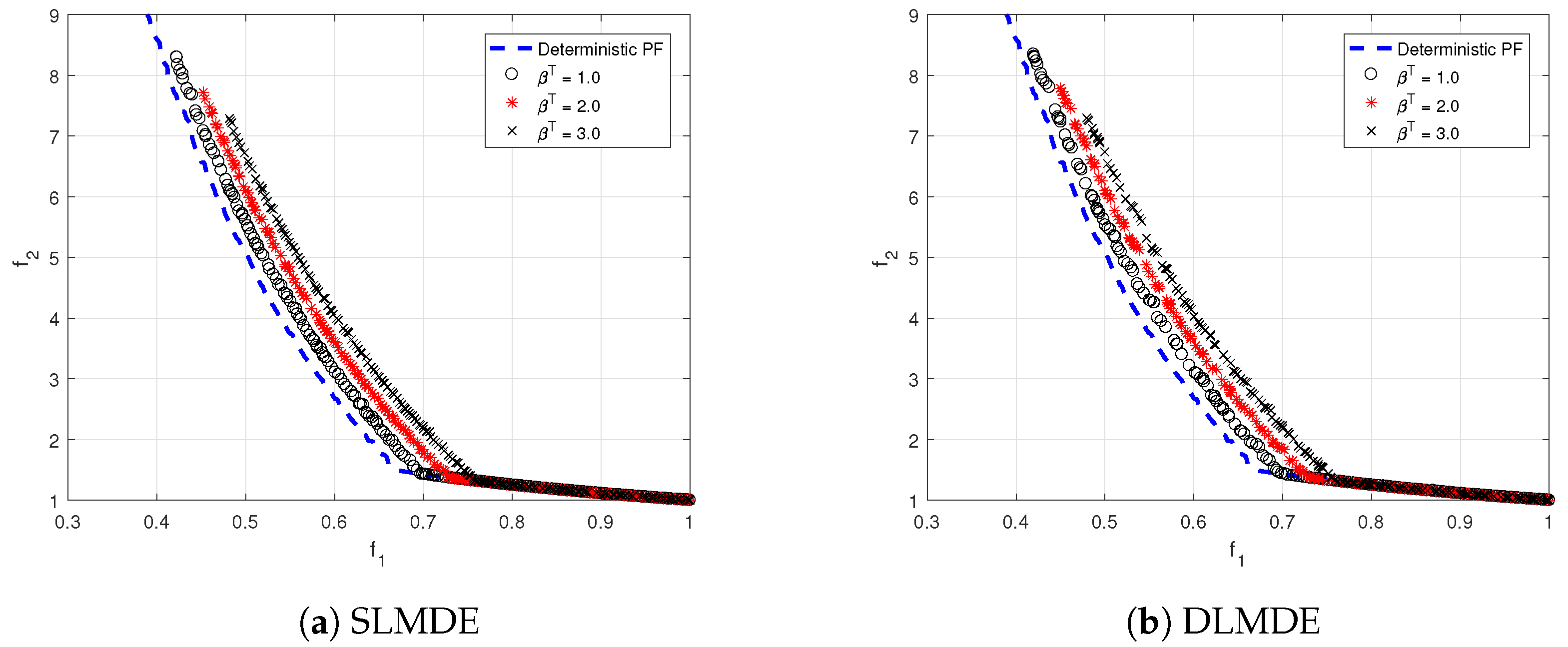
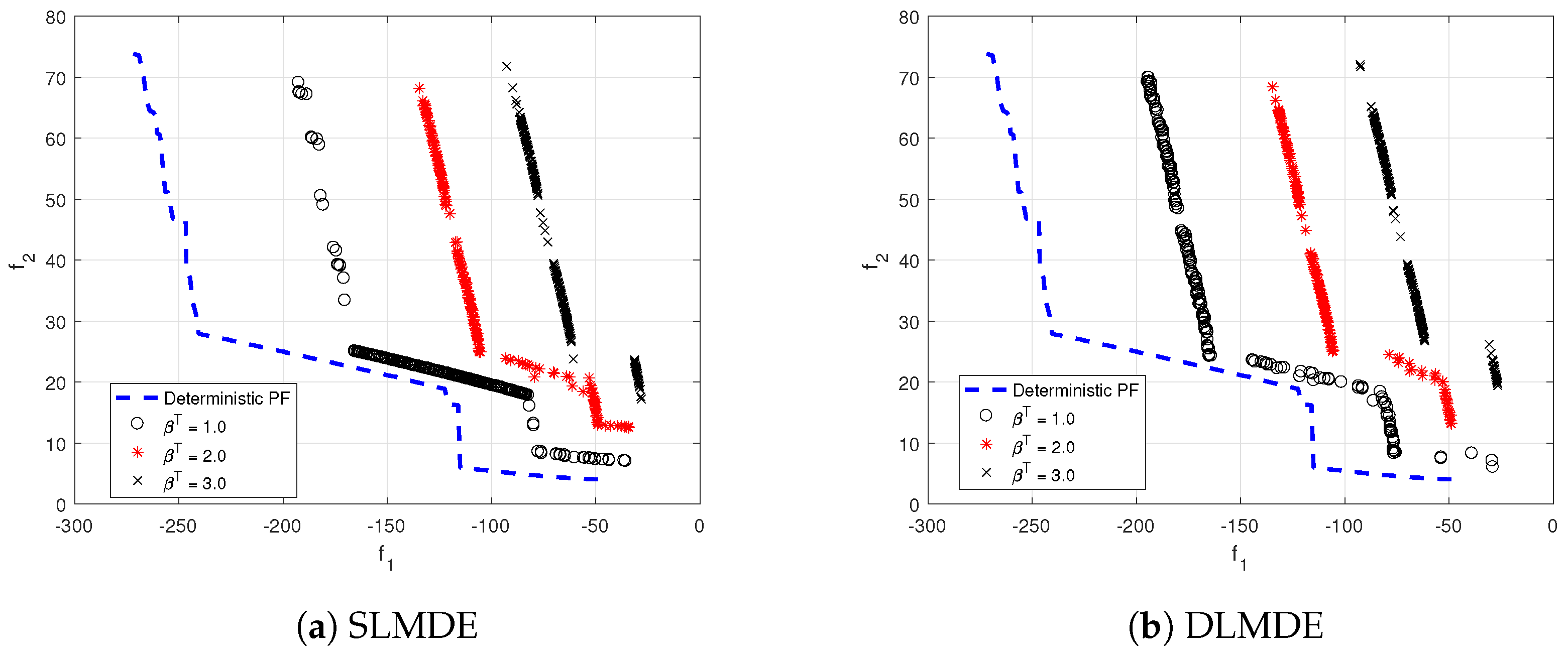
The proposed method is tested on three benchmark examples from the literature. The results are compared with a double-loop variant of multi-objective differential evolution using PMA for reliability analysis.
The organization of the paper is as follows. In
Section 2, a brief discussion on multi-objective RBDO, PMA, chaos control method, single-loop method, and shifting vector approach are presented. The proposed single-loop multi-objective reliability-based design optimization method is discussed in
Section 3, along with its implementation. The adaptive mutation scheme and the detailed steps of multi-objective differential evolution are also discussed in this section. Numerical examples are solved and discussed in
Section 4. Finally, the paper is concluded in
Section 5 with a note on future work.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}